
Supporting the Adaptation of Agents’ Behavioral Models in Changing
Situations by Presentation of Continuity of the Agent’s Behavior Model
Yoshimasa Ohmoto
1 a
, Junya Karasaki
2
and Toyoaki Nishida
2,3
1
Faculty of Infomatics, Shizuoka University, Hamamatsu-shi, Shizuoka-ken, Japan
2
Department of Intelligence Science and Technology, Kyoto University, Sakyo-ku, Kyoto, Japan
3
Faculty of Informatics, University of Fukuchiyama, Fukuchiyama-shi, Kyoto, Japan
Keywords:
Human-agent Interaction, Human Factors, Shared Awareness.
Abstract:
In this study, we attempted to make participants continually estimate an agent’s behavioral model by having
the agent itself present the continuity of its behavior model during a task. By doing so, we aimed to encourage
users to pay attention to changes in the agent’s behavioral model and to make the user continuously change
the relationship between themselves and the agent. In order to make the participants continually estimate
the agent’s behavioral model, we proposed the method of “presentation of continuity of the agent’s behavior
model.” We implemented agents based on this and conducted an experiment using an animal-guiding task in
which one human and two agents cooperated. As a result, we were able to significantly increase the degree
to which participants paid attention to the agents and induce active interaction behavior. This suggests that
the proposed method contributed to maintaining a relationship between the agents and the participant even in
changing situations.
1 INTRODUCTION
In various aspects of society, complex problems arise
that cannot be handled by a single person. To deal
with such problems, plans are designed and managed,
and tasks are executed (Jennings et al., 2014). In
recent years, the importance of cooperation between
humans and agents in problem-solving has been rec-
ognized (van Wissen et al., 2012), and systems used
to support cooperation have been designed (Pacaux-
Lemoine et al., 2017). By utilizing the strengths of
humans as well as agents in cooperatively execut-
ing tasks, both entities can solve problems more ef-
ficiently than if they work separately.
To solve complex problems, Allen et al. pro-
posed a flexible interaction strategy called a “mixed-
initiative interaction” (Allen et al., 1999). In a mixed-
initiative interaction, the roles of each subject are not
predetermined, and the goal is to accomplish the task
while dynamically changing the roles and initiatives
of both. This mixed-initiative interaction is particu-
larly important in cooperative tasks where it is diffi-
cult to capture the full scope of the plan, the plan is
fluid, or where the capabilities, environment, and in-
a
https://orcid.org/0000-0003-2962-6675
formation obtained by each entity are different.
Gianni et al. (Gianni et al., 2011) pointed out that
achieving a mutually initiated interaction between hu-
mans and agents involves challenges in four areas:
“allocation of responsibility for tasks between hu-
mans and agents,” “methods for switching initiative
between humans and agents,” “methods for exchang-
ing information between humans and agents,” and
“building and maintaining a shared awareness of the
state of humans and agents.” In order to “build and
maintain a shared awareness,” humans must sponta-
neously and continuously approach agents.
To build and maintain a shared awareness, a wide
range of information needs to be exchanged between
humans and agents. Awareness includes the relation-
ships among team members, goals to be achieved,
tasks required to achieve them, actions of individuals
and reasons for their actions, and changes in the sur-
rounding environment (Atkinson et al., 2014; Lyons,
2013). Cheetham et al. (Cheetham and Goebel, 2007)
categorized this information into “facts and beliefs,
reasoning, and conclusions.” If an agent has a certain
“reasoning,” it is likely that it should be presented in
a proactive manner.
Creating agents for mixed-initiative interactions
with humans has been attempted before, with some
290
Ohmoto, Y., Karasaki, J. and Nishida, T.
Supporting the Adaptation of Agents’ Behavioral Models in Changing Situations by Presentation of Continuity of the Agent’s Behavior Model.
DOI: 10.5220/0010846500003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 1, pages 290-298
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
success (Chen et al., 2019; de Souza et al., 2015).
On the other hand, to realize a two-way change in
initiative, it is necessary to encourage a mutual vol-
untary change of initiative by confirming the con-
structed shared awareness, rather than by using inter-
face functions. In order to encourage users to volun-
tarily switch initiatives, the agent’s intention model
must be predicted. Several agent design methods
have been proposed that focus on the cognitive prop-
erty that the intention model of the agent as predicted
by the user influences the interaction (Kiesler, 2005;
Matsumoto et al., 2005). It is believed that when an
agent has a certain purpose, the user will infer some
intentions toward the agent. In this study, the agents
record the events they experience and the information
they collect from other users and agents, and decide
their own actions based on these records, thereby im-
plicitly presenting the agents’ intentions during a se-
ries of tasks and making it easier for users to infer the
agent’s intention model.
There are many situations in which the construc-
tion of shared awareness is required. “Facts and be-
liefs” and “conclusions” can be shared in advance be-
fore the task occurs, but “reasoning” must be updated
in real time. However, especially when an agent or
system is the interaction partner, users often do not
assume that the partner’s “reasoning” model will be
updated by a consistent mechanism. We hypothesized
that by explicitly stating that the agent updates its be-
havioral model during the task in a consistent manner,
the user will notice that the agent’s behavioral model
is updated within a predictable range, and will change
the relationship between themselves and the agent to
accommodate the change.
The purpose of this study is to make users pay at-
tention to the changes in the agent’s behavioral model
and to make the relationship between the user and
the agents change adaptively. For this, we proposed
a method of presentation of continuity of the agent’s
behavior model that explicitly states the relevance of
past actions as the basis for the agent’s actions while
performing continuous interaction with the agent, in-
cluding chatting, and examined its effectiveness.
2 PRESENTATION OF
CONTINUITY OF THE
AGENT’S BEHAVIOR MODEL
Our ultimate goal is to build shared awareness among
the users and the agents in a collaborative task, which
is one of the concerns in realizing mixed-initiative in-
teraction. In this study, by encouraging the partici-
Input
Task Environment Player 1 behavior Player 2 behavior
Memory
for Player1
Memory
for Player2
Own
memory
Action
Utterance
Action
Utterance
Action
Utterance
Task database
Action
Utterance
Task
structure
Agent
Player 1
state estimation
Player 2
state estimation
Agent behavior decision
Future
state estimation
Output
Agent’s Action
Agent’s Utterance
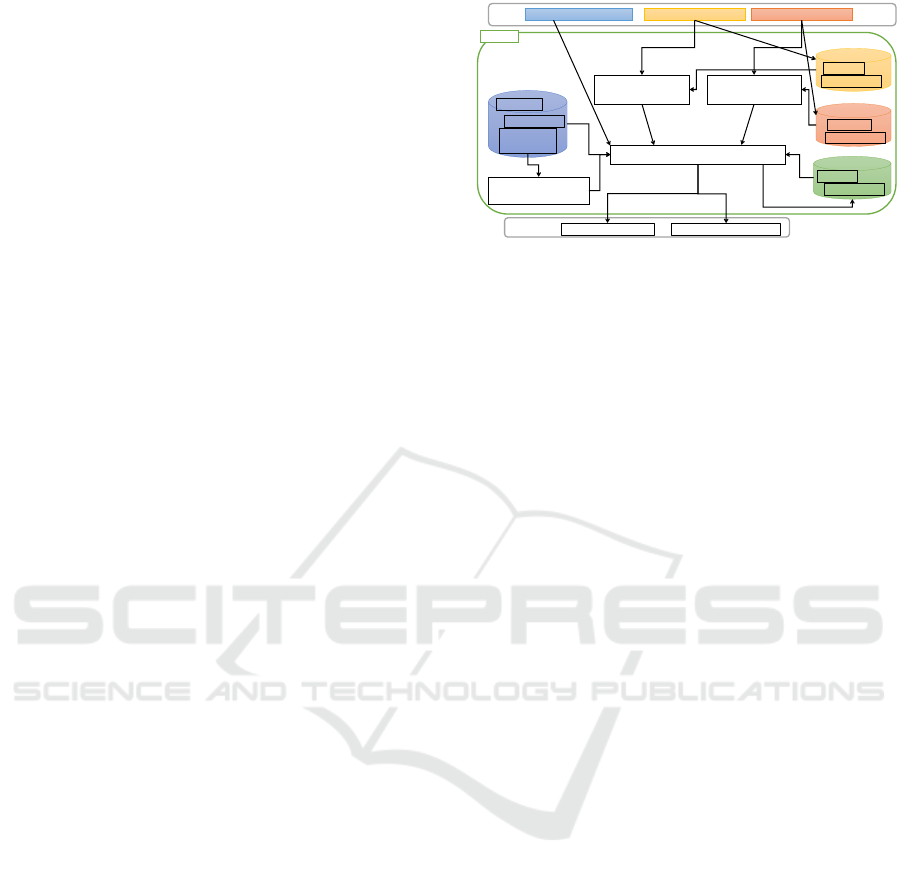
Figure 1: The component diagram of the agent.
pants to continue to estimate the other person’s be-
havioral model forcing making them recognize the re-
lationship between the behavior expressed during the
interaction, we attempted to support users in adapting
to changes in the agent’s behavioral model in chang-
ing situations. This is referred to as “presentation of
continuity of the agent’s behavior model (PCB)”.
As an approach to realize continuous estimation
of agent’s behavioral model during interaction, con-
sidering “behavior selection based on temporal con-
tinuity,” we considered 1) presenting a rationale for
the agent’s actions based on information obtained in
successive events that occurred during the task, and 2)
conducting chats related to the agent’s personality and
the actions performed during the events in scenarios
with low work density.
2.1 Behavior Selection based on
Information Obtained in Events
We considered a behavioral model in which an agent
records the events it experiences and the information
it collects from other users and agents, and determines
its own behavior based on information obtained in
successive events. The component diagram is shown
in Figure 1. By using this, the agent can change the
basis of the action it presents according to the sur-
rounding situation and the history of its past actions.
The agent memorizes the actions and utterances
of other users and agents, and selects the behavior
to be performed from among the predetermined op-
tions based on the information about them in the past
and the information about the current surrounding en-
vironment. When the agent decides on its own be-
havior, it also records that action in the memory and
uses it for deciding on the next behavior. In this way,
the data that can be used to make decisions increases
over time, but is also lost from the memory as time
passes. In addition, there is a future estimation com-
ponent to predict future events based on past events.
In the current implementation, this future estimation
Supporting the Adaptation of Agents’ Behavioral Models in Changing Situations by Presentation of Continuity of the Agent’s Behavior
Model
291

component is maintained as a tree-structured condi-
tional branching database based on a pre-analyzed
task structure. The actions and utterances selected by
the action decision component are all selected from
those in the database.
2.1.1 Presenting Evidence based on Experience
If a user is unaware that the agent’s actions and deci-
sions are related to the user’s actions and the events
of the task, it becomes difficult for the user to assume
an agent’s behavior model. To overcome this issue,
we added a mechanism to the action decision com-
ponent that clearly presents the fact that the agent is
acting based on past information that is continuous in
time as the basis for the action in the scene where the
agent made the decision.
In situations where an agent decides on an action,
it expresses verbally which information from past
events, the current environment, or future speculation
most strongly influenced the choice. Furthermore, in
situations where other agents are acting, when it is
possible to predict from which information the action
was chosen, the information on which the action is
based is communicated to the surroundings. In either
case, the expression itself is predetermined and con-
cise.
2.1.2 Chatting as Continuous Interaction
When users and agents collaborate on long-term
tasks, their work density is not always constant, and
it is expected that there will be a mixture of busy
and relatively relaxed situations. The interaction de-
creases when the work density is low, and the user
pays less attention to the agent. This inhibits the user
from continuously estimating the behavioral model of
the agent.
To prevent such a situation, we added a mecha-
nism to the action decision component for “chatting
to share information about user and agent’s personal
experiences” and “chatting about events performed in
the past” in situations where the work density is low.
By referring to past events, we expected to confirm
each other’s “facts and beliefs” that were implicitly
shared before. In the chat that shared information
about personal experience, we encouraged the estima-
tion of the agent’s behavioral model by talking about
episodes related to the agent’s preferences.
3 EXPERIMENT
We attempted to support the participant’s adaptation
to changes in the agents’ behavioral model even in
Task control PC
Agent status
Participant’s
preferences
WoZ
environment
Display the Task environment
Experimenter
Commands
Immersive display
Participant
Figure 2: The experimental setting.
changing situations by making them recognize the rel-
evance of the agent’s actions through the proposed
PCB. We implemented agents that acted based on the
model, and conducted an experiment using a task of
crowd guidance. The group with two agents that im-
plemented PCB was called the “continuity presen-
tation group (CP-group)”, and the group with two
agents that did not present the basis for their actions
or engage in chitchat, but whose behavioral model it-
self was the same, was called the “non-presentation
group (NP-group)”.
3.1 Experimental Setting
The experimental setting is shown in Figure 2. We
used a 360-degree immersive display consisting of
eight portrait orientation LCD monitors with a 65-
inch octagonal screen. In this environment, partici-
pants can easily look around in the virtual space with
a low cognitive load, similar to the real world. A par-
ticipant’s virtual avatar was controlled using a game
pad. Participants wore a headset with a microphone.
In order to ensure a verbal response, the participant’s
speech was transmitted to an operator through the mi-
crophone, and the agent’s speech was output by the
operator based on predetermined rules (Wizard of Oz:
WoZ).
3.2 Procedure
First, the experiment was explained to the partici-
pants, and they were asked to practice the manipula-
tion of the task. The manipulation practice was com-
pleted when the participants felt that they could oper-
ate the task at a level that would not interfere with the
experiment.
After providing a brief explanation of the main
session, the experimenter began recording the video
and started agent interaction. The participants per-
formed the task sequentially. In the main session,
a WoZ operator partially controlled agent behavior.
The WoZ operator input a reaction command to the
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
292

agents based on predefined rules and reaction pat-
terns when the participant tried to interact with the
agents. During conversational interaction, the con-
versation between the two agents was automatically
controlled based on the predetermined scenario. Af-
ter all sessions were completed, a questionnaire was
administered to obtain a subjective evaluation of the
participants.
We conducted an experiment with 27 Japanese
university students (aged 19 to 24 years, mean = 22.7,
SD = 2.64). Sixteen were male and eleven were fe-
male. The participants were divided into two groups.
The members in the CP-group included 13 partici-
pants (eight male and five female) and the remaining
participants were included in the NP-group.
3.3 Description of the Task
The participants played a game in which two agents
(John and Ellie) and one participant worked together
to guide animals in a virtual space. Here, the partici-
pant and the agents are referred to as “players”. The
objective of the task was for the three players to co-
operate in guiding multiple animals (sheep) wander-
ing around the game field to the goal point in virtual
space. At first, there were only two sheep, but they
were scattered near the route to the goal point, and
the goal was to collect those sheep while heading for
the goal point. In this task, it was necessary for play-
ers to flexibly coordinate how to deal with problems
that arise periodically in the task while cooperating to
achieve a single goal.
A standard route was shown on the game field, and
the sheep might be found around the route. There
were various obstacles in the field, and the player
needed to guide the sheep to the goal point by avoid-
ing or removing these obstacles. There were also
items in the field, which could be picked up to re-
move obstacles and guide the sheep. The game score
was calculated based on the number of sheep taken to
the goal and the time taken to reach the goal.
On the way to the goal point, there were several
objects that blocked movement. Those objects could
be destroyed. Among the objects that blocked move-
ment were doors that could not be destroyed but could
be unlocked. Destroying or opening an object without
using an item (a weapon or a key) took a relatively
long time, which reduced the score obtained when the
goal was reached. This was taught to the participants.
Figure 3 shows a bird’s eye view of the field where
the participants performed the animal guidance task.
The orange line represents the standard route to the
goal, and the circled numbers indicate the locations
where events occurred in the task. The starting point
Goal
Start
Figure 3: The event map of the game field.
is in the upper left corner, and the players took the
sheep scattered around the route to the farm at the goal
point. When the players used the map item, the white
lines and numbers in Figure 3 were erased.
1. Players introduced themselves.
2. One of the agents picked up a map.
3. A flag and a weapon were placed on the floor.
4. The players experienced that destroying an object
reduced their stamina, and that it was easier for
the sheep to get lost if the same player kept hold-
ing the flag.
5. A sheep was hiding in a side street.
6. If the players chose to ignore the sheep, they
needed to break the fence on the road ahead.
7. The route was blocked by a large rock. There was
no other choice but to deviate from the route and
continue through the forest.
8. The entrance to the forest was blocked by a fence.
The players were able to open it and proceed from
the menu command.
9. The players could find a pen with sheep trapped in
it in the middle of the pond. The two agents told
the participant that they would move to the left to
find a way back to the standard route, and told the
participant to go to the right to catch the sheep.
10. The participant was able to open the fence of the
pen and catch the sheep. A sign on the side de-
scribed the traps to catch sheep further along the
route.
11. The two agents who were separated from the par-
ticipants picked up a weapon here.
12. The participant and the agents met up before here.
There was a trap to catch sheep that the partici-
pant had read about on the sign. If the participant
had not shared this information with the agents in
advance, the agents would have triggered the trap.
Supporting the Adaptation of Agents’ Behavioral Models in Changing Situations by Presentation of Continuity of the Agent’s Behavior
Model
293

13. The route was blocked by a small rock. By using
an item, they were able to efficiently remove the
obstacle.
14. The route was blocked by a gate. The key to open
the gate could be found by looking around or by
looking at the map.
15. The players opened the fence and obtained the
key. If the participant spotted sheep, the partici-
pant could take them away.
3.4 Behavior of Agents in the CP-group
and the NP-group
The two agents in each group had different prefer-
ences in the way they performed the task. So, each
agent gave different directional advice.
In the CP-group, two types of behavior were pre-
sented: (1) when the agents acted at a certain point
in time, they indicated that they had a consistent ba-
sis with their previous actions, and (2) when the work
density in the task execution was low, they gave their
impressions based on the previous events. The agents
in the CP-group and NP-group performed the same
actions and judgments related to task execution. The
differences in the agents of each group are shown be-
low.
Situations That Require Action, Such as Breaking
an Object, Catching Sheep, or Holding a Flag.
CP-group: In situations where it was judged that the
agent should take active action, one agent pro-
posed the action while stating the basis, and the
other agent acted by indicating that he or she
agreed. In situations where the participant should
perform the action, one agent suggested the action
while stating the basis.
NP-group: In situations where it was judged that the
agents should take active action, one agent pro-
posed what to implement, and the other agent
acted by indicating his approval. In situations
where it was judged that the participant should
perform the action, one agent proposed what
should be performed.
Scene Where Players Moved with Sheep in Tow.
CP-group: Each agent engaged in chats related to
his or her own occupation and other personali-
ties, chats about their impressions of the previ-
ous events, and chats about speculating on future
scenes based on past events. In some cases, the
agents chatted with each other, but in other cases,
they asked the participant for his or her opinions.
NP-group: The players moved basically in silence.
In situations where task hints were required, the
agents muttered the hints.
Agents’ Behavior When Agents and Participant
Were Acting Separately.
CP-group: In addition to the content of the chats be-
tween events, the agents also chatted about what
each other was doing during their separate activi-
ties. These chats could also be heard by the par-
ticipant via walkie-talkies. The agents did not talk
to the participant when they were working.
NP-group: The players worked in silence. If a task
hint was available on the agent side, the agents
muttered. This mumbling was also heard by the
participants via walkie-talkies.
Differences in the Behavior of the Two Agents.
Commonality: Hints that required consideration of
the task were often stated by Ellie, whereas intu-
itive actions were more often carried out by John.
John and Ellie had common criteria for how to
proceed with the task, such as breaking obstacles
or bypassing the route.
CP-group: Each agent presented actions and opin-
ions that were considered appropriate in each sit-
uation based on their own preferences. In chatting
and rationale situations, John had a weak outlook
on the future and relied on his intuition, while El-
lie preferred to see the whole picture and some-
times admonished John.
NP-group: Same as the CP-group, each agent pre-
sented actions and opinions that were considered
appropriate in each situation according to their
own preferences. However, they did not indicate
that they had a common basis with their previous
actions, and did not engage in chats that were not
directly related to task execution.
3.5 Result
3.5.1 Differences in the Attention That
Participants Paid to the Agents
We attempted to determine how much attention the
participants paid to the agent’s actions and state dur-
ing the task. However, in situations where the partic-
ipant and the agent were acting together, it was diffi-
cult to determine whether the participant’s action was
the result of paying attention to the agent or the re-
sult of understanding the task situation. Therefore,
in events where the participant and the agents acted
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
294
Experiment Control
0
1
2
3
4
Score
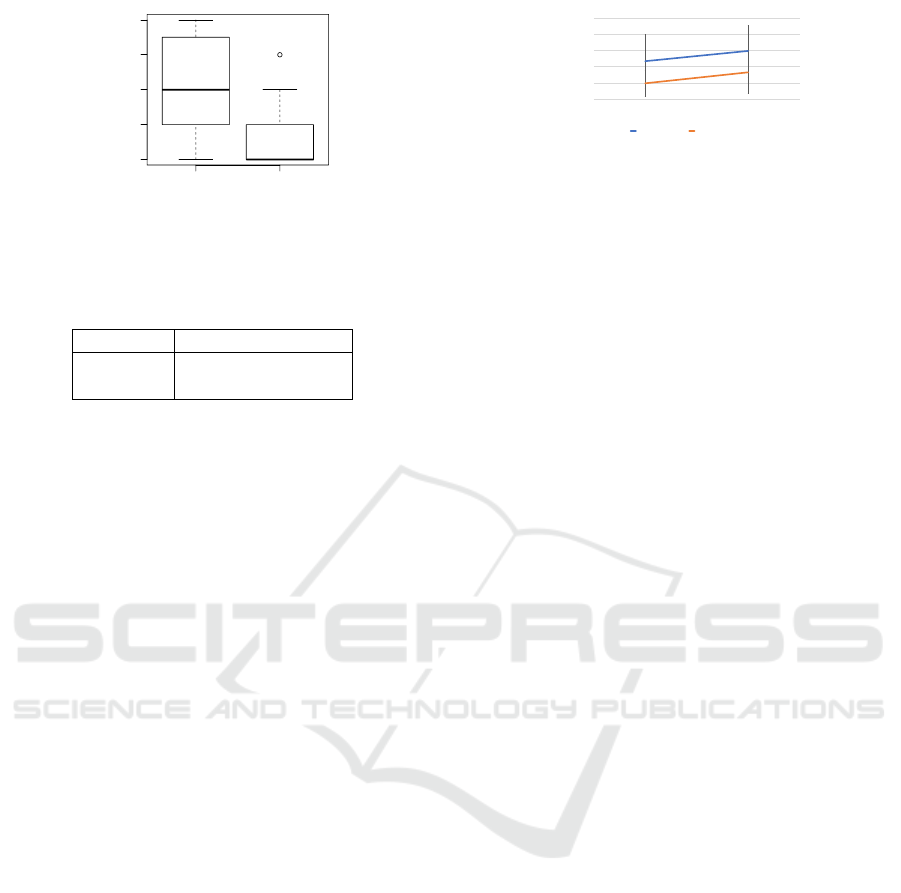
Figure 4: The number of participant’s actions that would
have occurred if the participant had paid attention to the
agent’s actions and state.
Table 1: The number of participants who actively ex-
changed information with the agent in these events.
active non-active
CP-group 9 3
NP-group 3 10
separately, we counted the participant’s actions that
would have occurred if the participant had paid at-
tention to the agent’s actions and state. The target
events were Events 9, 10, and 13: whether the par-
ticipant properly observed the agents when they went
their separate ways in Event 9, whether the partici-
pant shared information with the agents after obtain-
ing information that only the participant could know
in Event 10, and whether the participant thought of a
way to break through Event 13 after considering the
items obtained by the agent in Event 11.
Figure 4 shows the result. The mean for the CP-
group was 2.08 (SD = 1.44), and the mean for the NP-
group was 0.69 (SD = 0.95). Wilcoxon’s rank sum
test showed that there was significantly more attention
to the agents in CP-group (p = 0.010).
The behaviors in Event 10 and 13 required strong
proactivity. Therefore, we examined the number of
participant who actively exchanged information with
the agent in these events. The number of people who
took any of the actions is showed in Table 1, and the
result of Fisher’s exact test showed that there were
significantly more active participants in CP-group (p
= 0.017).
3.5.2 Number of Utterances
The number of utterances is considered to be a
straightforward indicator of participants’ aggressive-
ness. Therefore, we counted the number of utterances
of the participant during the task. As the CP-group
and NP-group had different opportunities to talk de-
pending on whether or not there was a situation to
chat, we counted the number of utterances during
the execution of the event that were common to both
groups. We excluded utterances without linguistic
meaning, such as exclamations and affirmations.
0
5
10
15
20
25
First half Second half
CP-group NP-group
Figure 5: The number of utterances in the event that were
common to both groups.
The results are shown in Figure 5. We performed
the two-way analysis of variance (group: continuous
or discrete x half: first or second). Between the CP-
group and NP-group, there was significantly more the
number of utterances in the CP-group (F(1, 23) =
5.99, p = 0.023). Furthermore, between the first and
second half of the task, significantly more the number
of utterances was in the second half (F(1, 23) = 17.66,
p = 0.00030). The second half of the task was more
complex and required more speech than the first half,
which may have led to more speech. However, it is
interesting to note that there is a difference between
the CP-group and the NP-group regardless of the task
content.
3.5.3 Questionnaires
Participants’ subjective evaluations of the agent and
the task were investigated using questionnaires. For
Q01 through Q06 and for Q09 through Q14, partic-
ipants responded with a 7-point Likert Scale. The
results are showed in Figure 6. The participants an-
swered Q07, Q08 and Q15 with a value from 0 to
100. The results are showed in Figure 7. To exam-
ine the differences between the CP-group and the NP-
group, Wilcoxon’s rank sum test was conducted for
each questionnaire item, but no significant differences
were found.
Q01 and Q02, Q03 and Q04, Q05 and Q06, Q07
and Q08, Q09 and Q10, Q11 and Q12, and Q13 and
Q14 of the questionnaires asked the same questions
about the impressions of “John” and “Ellie” respec-
tively. Wilcoxon’s signed rank test was conducted
to examine the difference between the CP-group and
NP-group, but no significant difference was found
here.
3.5.4 Correlation Analysis of Questionnaires
We analyzed whether there were correlations between
“John” and “Ellie” on the same questions. The results
showed that most of the questions had significantly
high correlations (above 0.7). However, only in the
case of Q07 and Q08, no significant correlation was
found in the NP-group (CP-group: correlation coeffi-
cient 0.85, p=0.00042; NP-group: correlation coeffi-
Supporting the Adaptation of Agents’ Behavioral Models in Changing Situations by Presentation of Continuity of the Agent’s Behavior
Model
295

0 1 2 3 4 5 6 7
Q14: If the task had
continued, how…
Q13: If the task had
continued, how…
Q12: If the task had
continued, how…
Q11: If the task had
continued, how…
Q10: How well did
you feel Ellie…
Q09: How well did
you feel John…
Q06: How much did
you tried to guess…
Q05: How much did
you tried to guess…
Q04: How much did
you care about…
Q03: How much did
you care about…
Q02: During the
entire task, did…
Q01: During the
entire task, did…
NP-group CP-group
Q01: During the entire task, did you pay attention
to the actions of John?
Q02: During the entire task, did you pay attention
to the actions of Ellie?
Q03: How much did you care about what John was
doing while you were separated from him?
Q04: How much did you care about what Ellie was
doing while you were separated from her?
Q05: How much did you tried to guess John's
intentions that he did not specifically stated?
Q06: How much did you tried to guess Ellie's
intentions that she did not specifically stated?
Q09: How well did you feel John observed and
understood your actions?
Q10: How well did you feel Ellie observed and
understood your actions?
Q11: If the task had continued, how much do you
want to continue working with John after the task?
Q12: If the task had continued, how much do you
want to continue working with Ellie after the task?
Q13: If the task had continued, how trustworthy
did you find John to be?
Q14: If the task had continued, how trustworthy
did you find Ellie to be?
Figure 6: The results of questionnaires of Q01 to Q06 and
Q09 to Q14.
0 20 40 60 80 100
Q15: What
percentage of the…
Q08: What
percentage of the…
Q07: What
percentage of the…
NP-group CP-group
Q07: What percentage of the hints
given by John did you find useful?
Q08: What percentage of the hints
given by Ellie did you find useful?
Q15: What percentage of the total
task did you feel you contributed to?
Figure 7: The results of questionnaires of Q07, Q08 and
Q15.
cient 0.49, p=0.085). The questions were “What per-
centage of the hints given by John/Ellie did you find
useful?”
This result is a bit surprising. Intuitively, it is pos-
sible that by continuing the interaction while present-
ing a continuity of each agent’s behavioral model, the
individuality of the agents could be understood and
they could be recognized as individual entities. In or-
der to speculate on the cause of this result, we calcu-
lated the correlation with this question for John and
Ellie. The results showed that there were differences
between the CP-group and the NP-group in the corre-
lations between “Q01 and Q07” and “Q02 and Q08”.
There were also differences between the CP-group
and NP-group for the correlations between “Q09 and
Q07” and “Q10 and Q08”.
Between “Q01 and Q07” and “Q02 and Q08”.
Questions Q01 and Q02 were “During the entire task,
did you pay attention to the actions of John/Ellie?”
When the correlations were calculated, the correla-
tions for John’s impression were 0.75 for the CP-
group and 0.19 for the NP-group. The correlations
for Ellie’s impression were 0.76 for the CP-group and
0.46 for the NP-group. In other words, for both John
and Ellie, there were significantly high positive corre-
lations in the CP-group, but none in the NP-group.
Between “Q09 and Q07” and “Q10 and Q08”.
Questions Q09 and Q10 were “Did you feel that
John/Ellie was observing and understanding your be-
havior well?” When the correlations were calculated,
the correlations of John’s impression were 0.58 for
CP-group and 0.74 for NP-group. The correlations
for Ellie’s impression were 0.32 for the CP-group
and 0.79 for the NP-group. In other words, the NP-
group showed significantly high positive correlations
for both John and Ellie, but the CP-group showed rel-
atively weak correlations for John and no correlations
for Ellie.
These results can be summarized as follows: in
the CP-group, whether or not the participant paid at-
tention to the agent’s behavior was related to whether
or not the participant found the agent’s hint useful,
and in the NP-group, whether or not the participant
felt that the agent was paying attention to the partici-
pant’s behavior was related to whether or not the par-
ticipant found the agent’s hint useful. In other words,
in the CP-group, the participants who were oriented
toward active interaction with the agent thought the
agent’s hints were useful, while in the NP-group, the
participants who were oriented toward passive inter-
action with the agent thought the agent’s hints were
useful. These results suggest that the way of relating
the attention to agents’ actions and the evaluation of
agents’ actions differed between the CP-group and the
NP-group.
Between “Q11 and Q15” and “Q12 and Q15”.
The correlations between Q11 and Q15 and between
Q12 and Q15 were also different. Questions Q11 and
Q12 were “If the task had continued, how much do
you want to continue working with John/Ellie after
the task?” Question Q15 was “What percentage of the
total task did you feel you contributed to?” The cor-
relations were calculated. The correlations of John’s
impression were 0.80 for the CP-group and 0.047 for
the NP-group. The correlations for Ellie’s impres-
sion were 0.80 for the CP-group and -0.11 for the
NP-group. In both cases, a significantly high positive
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
296

correlation was found only for the CP-group. This in-
dicates that the relationship between one’s own con-
tribution to the task and the evaluation of the agent’s
task performance is different between the CP-group
and the NP-group. In other words, it suggests that in
the CP-group, the participants’ own subjective degree
of contribution to the task was associated with their
evaluation of the agent’s behavior during the task.
3.5.5 Correlation between Behavioral Indices
and Questionnaires
Correlation analysis was conducted to examine the re-
lationship between each item of the questionnaires,
the attention to the agent, and the number of utter-
ances. As a result, there were significant correlations
between the following items in the CP-group: Q15
and attention to the agent (0.66), Q15 and number
of utterances (in first half (0.58), and in second half
(0.65)). But, there was no significant correlation in
the NP-group.
This indicates that in the case of the CP-group,
there was a connection between the participant’s own
actual behavior and the evaluation of his or her con-
tribution to the task. In other words, in the CP-group,
the participants’ own active involvement in the task
and agent was perceived to be related to their subjec-
tive evaluation of their own contribution to the task,
while this was not the case in the NP-group.
4 DISCUSSIONS AND
CONCLUSION
In this study, we attempted to make participants con-
stantly estimate the agent’s behavioral model by hav-
ing the agent itself present the continuity of the ac-
tions it performs in the task. By doing so, we aimed to
help users continually adapt to changes in the agent’s
behavioral model even as the surrounding situation
changed. Specifically, we 1) presented the basis for
the agent’s behavior based on information about suc-
cessive events that occurred in the task, and 2) con-
ducted chats related to the agent’s personality and
the events performed in the task even in situations
where there were no events in the task. Using these,
we examined the effects of “presentation of continu-
ity of the agent’s behavior model (PCB)”, in which
participants are made aware that the agent retains the
same memories, personalities, and behavioral mod-
els throughout the task, and can therefore estimate the
behavioral models associated with the agent’s actions
and opinions. We implemented agents that act based
on this, and conducted an evaluation experiment us-
ing a guiding sheep task. As a comparison, we im-
plemented agents like conventional agents that do not
present the basis for their actions, but the behavioral
model itself was the same.
The results of the experiment showed that the de-
gree to which the participants in the CP-group paid
attention to the agents was significantly higher than
that in the NP-group. In addition, the number of par-
ticipants who not only paid attention but also actively
shared information was significantly higher in the CP-
group. The number of utterances, which is considered
to be an indicator of the participants’ active approach
to the agent, was also significantly higher in the CP-
group. Therefore, we can suggest that the PCB en-
couraged participants to pay attention to the agent
continuously, and elicited a positive attitude toward
the interaction with the agents.
The fact that the tendency of the participants’ be-
havior did not change until the end of the task sug-
gests that it contributed to maintaining the relation-
ship between the agent and the participant even in
dynamic situations. In previous studies, forced in-
teraction and other methods were used to build and
maintain an active attitude toward the agent (Ohmoto
et al., 2016; Ohmoto et al., 2018), but the interest to-
ward the agent decreased over time. However, in the
present experiment, the participants paid attention to
the agent even in the latter half of the task, so we
can affirm that presentation of continuity is one of
the methods to solve the issue faced in the previous
works.
We examined participants’ subjective evaluations
of each of the two agents using a questionnaire, but
there was no significant difference between the CP-
and NP-groups here. By contrast, when we calcu-
lated the correlations between the questionnaire items
and the behavioral indices in the CP-group and NP-
group, there were several items that showed different
trends. Correlation analysis suggested that the CP-
group and NP-group differed in the following aspects:
1) the CP-group related participants’ attention to the
agent’s behavior to their evaluation of the agent’s be-
havior; 2) the CP-group related participants’ degree of
subjective contribution to the task to their evaluation
of the agent’s behavior, and 3) the CP-group related
the participants’ own active involvement in the task
and agents to their own subjective degree of contri-
bution during the task. Summarizing these results, it
was suggested that the continuity presentation of the
behavioral model made the participants aware of the
relationship between their own actions and judgments
during the task and the actions of the agent.
Supporting the Adaptation of Agents’ Behavioral Models in Changing Situations by Presentation of Continuity of the Agent’s Behavior
Model
297

REFERENCES
Allen, J. E., Guinn, C. I., and Horvtz, E. (1999). Mixed-
initiative interaction. IEEE Intelligent Systems and
their Applications, 14(5):14–23.
Atkinson, D. J., Clancey, W. J., and Clark, M. H. (2014).
Shared awareness, autonomy and trust in human-robot
teamwork. In 2014 AAAI fall symposium series.
Cheetham, W. E. and Goebel, K. (2007). Appliance call
center: A successful mixed-initiative case study. AI
Magazine, 28(2):89–89.
Chen, T.-J., Subramanian, S. G., and Krishnamurthy, V. R.
(2019). Mini-map: Mixed-initiative mind-mapping
via contextual query expansion. In AIAA Scitech 2019
Forum, page 2347.
de Souza, P. E. U., Chanel, C. P. C., and Dehais, F. (2015).
MOMDP-based target search mission taking into ac-
count the human operator’s cognitive state. In 2015
IEEE 27th international conference on tools with ar-
tificial intelligence (ICTAI), pages 729–736. IEEE.
Gianni, M., Papadakis, P., Pirri, F., and Pizzoli, M. (2011).
Awareness in mixed initiative planning. In 2011 AAAI
Fall Symposium Series.
Jennings, N. R., Moreau, L., Nicholson, D., Ramchurn,
S., Roberts, S., Rodden, T., and Rogers, A. (2014).
Human-agent collectives. Communications of the
ACM, 57(12):80–88.
Kiesler, S. (2005). Fostering common ground in human-
robot interaction. In ROMAN 2005. IEEE Interna-
tional Workshop on Robot and Human Interactive
Communication, 2005., pages 729–734. IEEE.
Lyons, J. B. (2013). Being transparent about transparency:
A model for human-robot interaction. In 2013 AAAI
Spring Symposium Series.
Matsumoto, N., Fujii, H., Goan, M., and Okada, M. (2005).
Minimal design strategy for embodied communication
agents. In ROMAN 2005. IEEE International Work-
shop on Robot and Human Interactive Communica-
tion, 2005., pages 335–340. IEEE.
Ohmoto, Y., Takashi, S., and Nishida, T. (2016). Effect on
the mental stance of an agent’s encouraging behavior
in a virtual exercise game. In Cognitive 2016: The
eighth international conference on advanced cogni-
tive technologies and applications, pages 10–15.
Ohmoto, Y., Ueno, S., and Nishida, T. (2018). Effect of vir-
tual agent’s contingent responses and icebreakers de-
signed based on interaction training techniques on in-
ducing intentional stance. In 2018 IEEE International
Conference on Agents (ICA), pages 14–19. IEEE.
Pacaux-Lemoine, M.-P., Trentesaux, D., Rey, G. Z., and
Millot, P. (2017). Designing intelligent manufacturing
systems through human-machine cooperation princi-
ples: A human-centered approach. Computers & In-
dustrial Engineering, 111:581–595.
van Wissen, A., Gal, Y., Kamphorst, B., and Dignum, M.
(2012). Human–agent teamwork in dynamic environ-
ments. Computers in Human Behavior, 28(1):23–33.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
298
