
Vectorization of Bias in Machine Learning Algorithms
Sophie Bekerman
1,∗ a
, Eric Chen
1,∗ b
, Lily Lin
2,∗ c
and George D. Monta Nez
1 d
1
AMISTAD Lab, Dept. of Computer Science, Harvey Mudd College, Claremont, CA, U.S.A.
2
Department of Math and Computer Science, Biola University, La Mirada, CA, U.S.A.
Keywords:
Inductive Bias, Algorithmic Bias, Vectorization, Algorithmic Search Framework.
Abstract:
We develop a method to measure and compare the inductive bias of classifications algorithms by vectorizing
aspects of their behavior. We compute a vectorized representation of the algorithm’s bias, known as the in-
ductive orientation vector, for a set of algorithms. This vector captures the algorithm’s probability distribution
over all possible hypotheses for a classification task. We cluster and plot the algorithms’ inductive orientation
vectors to visually characterize their relationships. As algorithm behavior is influenced by the training dataset,
we construct a Benchmark Data Suite (BDS) matrix that considers algorithms’ pairwise distances across many
datasets, allowing for more robust comparisons. We identify many relationships supported by existing litera-
ture, such as those between k-Nearest Neighbor and Random Forests and among tree-based algorithms, and
evaluate the strength of those known connections, showing the potential of this geometric approach to investi-
gate black-box machine learning algorithms.
1 INTRODUCTION
With the growing prevalence of black-box algorithms
in machine learning, finding ways to evaluate these
algorithms is crucial. We propose the inductive orien-
tation vector, a geometric representation of bias, as a
tool for analyzing learning algorithms. The inductive
orientation vector captures the probability distribution
of an algorithm’s predictions. This vector originates
within the algorithmic search framework (Monta
˜
nez
et al., 2019), and quantifies the structural manifesta-
tions of various assumptions contained in general al-
gorithms. By empirically estimating this vector for
various algorithms, researchers can compare the al-
gorithms’ inductive biases on particular benchmark
datasets, much like how current model comparisons
use accuracy, precision, and memorization capacity
to compare algorithms (Caruana and Niculescu-Mizil,
2006; Osisanwo et al., 2017; Rong et al., 2021). In
doing so, we can identify hidden connections between
algorithms. By comparing the biases of new algo-
rithms to known biases of existing algorithms, we
provide a point of reference useful for determining
a
https://orcid.org/0000-0001-6497-3133
b
https://orcid.org/0000-0002-0469-3858
c
https://orcid.org/0000-0003-2500-6495
d
https://orcid.org/0000-0002-1333-4611
∗
These authors contributed equally
whether the new algorithms share significant biases
with previous ones or incorporate novel assumptions.
We can also use the inductive orientation vector to
compute other algorithm quantities such as algorith-
mic bias (Bashir et al., 2020), algorithmic capacity,
and entropic expressivity (Lauw et al., 2020), which
we will explore in future work. The inductive orien-
tation vector provides an objective measure for bias
in black-box algorithms, making it easier to choose
the best algorithm for a problem without resorting to
heuristics. Previously a strictly theoretical concept,
this analysis allows us to evaluate the behavior of al-
gorithms without knowing its underlying structure.
The remainder is organized as follows. In Section
2, we discuss prior work related to bias and vector-
ization. In Section 3, we summarize the algorithmic
search framework and several relevant definitions. We
then establish a process to estimate inductive orienta-
tion vectors and present results in Section 4. In Sec-
tions 5 and 6, we implement and discuss additional
ways to analyze inductive orientation vectors.
2 RELATED WORK
The goal of the inductive orientation vector is to cap-
ture inductive bias. An algorithm’s inductive bias
is the set of assumptions the algorithm makes be-
354
Bekerman, S., Chen, E., Lin, L. and Monta Nez, G.
Vectorization of Bias in Machine Learning Algorithms.
DOI: 10.5220/0010845000003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 2, pages 354-365
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

yond strict consistency with training data (Mitchell,
1980). This bias inheres in the algorithm, so it is
distinct from bias in the training data. Bias is nec-
essary for learning because, without it, a classifica-
tion algorithm cannot generalize beyond training data
(Mitchell, 1980). This result has been supported ex-
perimentally (Runarsson and Yao, 2005), and for-
mally extended to show that algorithms must incor-
porate biasing assumptions to perform better than
uniform random guessing on unseen data (Monta
˜
nez
et al., 2019). If inductive bias is responsible for an al-
gorithm’s successes and failures on various problems,
then algorithms with similar inductive biases may be-
have similarly on a greater proportion of problems
than algorithms with different biases. This predictive
potential of inductive biases motivates the concept of
the inductive orientation vector.
A vector representation of bias can allow geo-
metric analysis of hidden connections between var-
ious algorithms. Over the past decade, vectoriza-
tion has revolutionized machine learning. One promi-
nent case is vector space word embeddings in nat-
ural language processing. Word embedding meth-
ods capture semantic notions geometrically (Gonen
and Goldberg, 2019), allowing for “vector arithmetic”
of words, such as Madrid - Spain + France =
Paris (Mikolov et al., 2013). They are also useful in
practice: using word embeddings, the language model
GPT-3 recently achieved state-of-the-art results for
many natural language benchmark tasks (Brown et al.,
2020). Given the ubiquity and utility of vector repre-
sentations of words, a vector representation of bias
could be equally far-reaching.
3 THE SEARCH FRAMEWORK
3.1 The Search Problem
Inductive orientation vectors were initially introduced
in the context of the algorithmic search framework,
a learning-theory framework for analyzing machine
learning and search algorithms (Monta
˜
nez, 2017). In-
ductive orientation vectors were designed to compute
specific theoretical quantities related to learning algo-
rithm performance; estimating these vectors empiri-
cally can allow us to estimate those related quantities
(Monta
˜
nez et al., 2021). Within this framework, the
process of learning is cast as a search for an ideal hy-
pothesis (or hypotheses). Each search problem is rep-
resented by the 3-tuple, (Ω, T , F). The search space
Ω is a finite set of all possible solutions (hypotheses)
to a search problem. Within the set Ω is the target
set T that contains the desirable and/or acceptable so-
lutions. The target function t conveniently encodes
the relation between the target set and its respective
search space as a binary |T |-hot vector of length |Ω|.
Each entry in the target vector corresponds to a po-
tential solution ω in the search space. At each in-
dex, the target vector takes on the value of 1 if ω ∈ T
and 0 otherwise. The external information resource
F provides initialization information (e.g., training
data) and guides the algorithm in the search process
by evaluating elements of the search space (through
a loss or fitness function). The search framework ac-
commodates many types of algorithms; for example,
we can cast classification problems as search prob-
lems in the framework by considering classification
as the search for a correct sequence of labels in the
search space of all possible labels (Monta
˜
nez, 2017).
To make this more concrete, consider a classifi-
cation problem in which there are C different labels
(classes). We train a classification model on a training
set and evaluate its performance on a holdout (test) set
of size N. Here, we are searching for a correct (or ac-
ceptable) labeling of the entire holdout set; thus, the
search space Ω would be the set of all possible com-
binations of labeling the elements in the holdout set
where |Ω| = C
N
. The target set T would consist of
sequences of correct (or acceptable) labelings of the
holdout set. Depending on the problem, we might re-
quire that a sequence of labels be completely correct
to be included in the target set, or we might be satis-
fied with sequences that label the holdout set within a
chosen threshold of accuracy. Finally, the external in-
formation resource F is the classification model’s loss
function and data used to train the model.
3.2 The Search Algorithm
During the search process, a search algorithm A will
induce a probability distribution P
i
on the search
space Ω; the algorithm will assign higher probabil-
ity to elements in the search space that it perceives
are likely to be in the target set. The search process
is an iterative process; the number of iterations varies
depending on the learning task. For each iteration, the
search algorithm induces a probability distribution P
i
over the search space Ω which is determined using
the search history H. H contains a series of tuples
(ω
i
, F(ω
i
)) where ω
i
is a solution previously queried
by the algorithm at the ith iteration (or time step) and
its corresponding evaluation under the external infor-
mation resource F. At each iteration i an algorithm
queries an element ω
i
from the search space based
on the current probability distribution P
i
, evaluates
ω
i
using the F, and adds the tuple (ω
i
, F(ω
i
)) into
the search history H. The algorithm then adjusts the
Vectorization of Bias in Machine Learning Algorithms
355

Ω
P
BLACK-BOX
ALGORITHM
HISTORY
ω₀, F(ω₀)
ω₃, F(ω₃)
ω₈, F(ω₈)
ω₅, F(ω₅)
ω₂, F(ω₂)
i
i − 6
i − 5
i − 4
i − 3
i − 2
i − 1
ω₆, F(ω₆)
CHOOSE NEXT POINT AT TIME STEP i
ω, F(ω)
Figure 1: Black-box search algorithm. At time i the algo-
rithm computes a probability distribution P
i
over the search
space Ω, using information from the history, and a new
point is drawn according to P
i
. The point is evaluated us-
ing external information resource F. The tuple (ω,F(ω)) is
then added to the history at position i. Note, indices on ω
elements do not correspond to time step in this diagram, but
to sampled locations.
probability distribution on the search space, P
i+1
, ac-
cording to the search history. By the end of a search
process (or run), a probability distribution sequence
˜
P is produced. If, at the end of the run, the search
history contains at least one element in the target set,
the algorithm is successful; this is only evaluated after
the search process is completed because the algorithm
does not have access to the target set. Figure 1 pro-
vides a graphical representation of the search process.
3.3 Inductive Orientation Vector
Following Monta
˜
nez, we use the expected per-query
probability of success to measure an algorithm’s per-
formance (Monta
˜
nez, 2017). Per-query normaliza-
tion accounts for differences in the number of sam-
pling steps (iterations) per run. Taking the expectation
of multiple runs of the search process when trained
on the same information resource F accounts for any
stochastic differences between different runs. Mathe-
matically, the expected per-query probability of suc-
cess is defined as
q(T, F) = E
˜
P,H
"
1
|
˜
P|
|
˜
P|
∑
i=1
P
i
(ω ∈ T )
F
#
(1)
where
˜
P is a sequence of probability distributions P
i
at each iteration i over the search space, T is the tar-
get set, F is the external information resource, and
H is the search history. The number of queries made
during a search is equal to the length of |
˜
P|. The ex-
pectation accounts for stochastic differences between
multiple runs of the algorithm, while the inner quan-
tity measures the expected probability of success of a
single run (Lauw et al., 2020).
Previously, Monta
˜
nez demonstrated a more con-
venient way of expressing the expected per-query
probability of success as the inner product of the tar-
get function and a vector representing the expected
probability distribution induced by the search algo-
rithm A over multiple runs (Monta
˜
nez, 2017). Let P
F
be the vector representation of this averaged probabil-
ity distribution (conditioned on F) induced on Ω over
multiple runs of the search process. Formally, define
P
F
:= E
˜
P,H
"
1
|
˜
P|
|
˜
P|
∑
i=1
P
i
F
#
. (2)
This is the inductive orientation vector of A relative
to a particular information resource F. The sum of
all the probability mass on elements in the target set
yields the probability of success, which is the prob-
ability that the algorithm queries an element in T .
This sum, known as the single-query probability of
success, is represented by t
>
P
F
, where t is a |T |-hot
target function. This establishes the equivalence be-
tween the expected per-query probability of success
over an entire search and the single-query probabil-
ity of success (sampled from the averaged probability
distribution induced by the search algorithm A in ex-
pectation), which is represented by q(T, F) = t
>
P
F
.
In the case that an algorithm is trained on different
information resources F, its expected performance is
calculated by finding an inductive orientation vector
P
D
relative to a data-generating distribution D on the
space of information resources F . Formally,
P
D
= E
D
P
F
= E
D
"
E
˜
P,H
"
1
|
˜
P|
|
˜
P|
∑
i=1
P
i
F
##
(3)
where F is distributed according to D (i.e., F ∼ D).
Then, the expected per-query probability of success
of an algorithm A when trained on information re-
sources F generated by the data generating process D
is E
F∼D
[q(T,F)] = t
>
P
D
. Both measures of success,
q(T, F) and E
F∼D
[q(T,F)], will be used.
3.4 Inductive Bias
Since an inductive orientation vector represents a
learning algorithm’s probability distribution over its
search space, it captures aspects of the algorithm’s in-
ductive bias. Inductive bias is set of the assumptions
built into a model, implicitly or explicitly, that allow
it to generalize from training data. Although an algo-
rithm’s inductive bias determines how it interacts with
data, it is a property of the algorithm that is indepen-
dent of the data. However, the close relationship of
inductive bias and data makes it difficult to isolate an
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
356

algorithm’s inductive bias. Thus, the inductive orien-
tation vector, P
D
, aims to estimate this property rela-
tive to a specific distribution of information resources
and search space. When comparing the inductive ori-
entation vectors of different algorithms trained on the
same set of information resources and search space,
we can attribute their differences to differences be-
tween algorithms’ inductive biases. In this way, the
inductive orientation vector makes an algorithm’s as-
sumptions explicit and measurable.
4 ESTIMATING INDUCTIVE
ORIENTATIONS
4.1 Method
We now present our method for estimating induc-
tive orientation vectors. We begin by describing our
data-generating process as well as some alternative
methods, introducing the Labeling Distribution Ma-
trix, and reviewing the inductive orientation vector.
Given a dataset, we first split the dataset into a
training set of n instances and a holdout set of size N.
Note that we assume this dataset to be representative
of its data-generating distribution D. To generate a
data resource F from the space, we sample a size m
subset from the size n training set with replacement
between subset selections. Note that each instance in
subset F is drawn without replacement.
Since F is a subset of the training set that was
drawn from D, F itself approximates a sample from
D (assuming m is large enough), being a subset of the
original i.i.d. instances drawn from that distribution.
Sampling m out of n instances is crucial, as this al-
lows us to estimate P
D
vectors even when we have
more data than is computationally feasible for train-
ing an algorithm. Each bootstrap subsample is drawn
from the empirical distribution which assigns to each
instance in the training dataset a probability of 1/n.
Having described our data-generating process, we
provide the pseudocode (Algorithm 1) of how we gen-
erate a Labeling Distribution Matrix (LDM, first in-
troduced by (Sandoval Segura et al., 2020)) relative
to a learning algorithm A and a distribution D. We
introduce LDMs as they are our data structure for esti-
mating inductive orientation vectors. Before explain-
ing the details of this estimation, let us review how to
construct an LDM and what its components are.
Let K be the number of independently selected
subsets F of the training set. Let R be the number of
times we repeat the process of training A on the same
subsample F
k
; this is to account for the stochastic na-
ture of some algorithms. We let P
F
k
denote the aver-
Algorithm 1: Labeling Distribution Matrix (LDM).
1: for all k = 1,.. .,K do
2: F
k
← Sample without replacement from training set
3: for all r = 1,. .., R do
4: Generate P
F
k
r
after training A on F
k
5: P
F
k
= P
F
k
+ P
F
k
r
6: end for
7: P
F
k
= P
F
k
/ R
8: Store P
F
k
in LDM
9: end for
10: Return LDM
aged probability distribution induced over its search
space Ω after training A on the subsample F
k
R times.
Together, the K simplex vectors P
F
k
form the columns
of the LDM. Note that P
F
k
is the probability distribu-
tion vector averaged over only the final iteration of
the search. In other words, P
F
k
r
corresponds to the
probability distribution induced over Ω at the last it-
eration in the search after being trained on F
k
. Having
computed the LDM, we compute the inductive orien-
tation vector P
D
relative to an algorithm A by simply
taking the average across the columns of the LDM.
In other words, we take the average of the P
F
k
’s to
be the inductive orientation vector relative to the data
distribution D (using our bootstrapped approximation
of it). In cases where multiple i.i.d. samples can be
drawn from D directly, the estimation will become
correspondingly more accurate.
4.1.1 Experimental Setup
To estimate inductive orientation vectors, we se-
lected a variety of machine learning algorithms from
Python’s scikit-learn library (version 0.22.2.post1)
(Pedregosa et al., 2011). The algorithms, along with
their parameters, are specified in Table 2. If a param-
eter is not specified, then the default value is used.
Note that both Linear SVC and SVC with a linear ker-
nel are included because we wanted to see if differ-
ences in implementation would affect algorithm be-
havior; Linear SVC is implemented using liblinear
rather than libsvm, making it more scalable for larger
datasets. Also, SGD Classifiers refer to algorithms
that are optimized by stochastic gradient descent. We
selected well-studied algorithms to evaluate our re-
sults against existing research. In general, our meth-
ods could be applied to any classification algorithm.
Since inductive orientation vectors are relative to
an algorithm A and a data distribution D, we se-
lected 10 datasets, 9 of which were chosen from the
UCI Machine Learning Repository (Dua and Graff,
2017; Moro et al., 2014; Cortez et al., 2009; Baati
Vectorization of Bias in Machine Learning Algorithms
357

and Mohsil, 2020; Palechor and de la Hoz Manotas,
2019). One dataset (denoted Random dataset) was
generated using np.random with RandomState set to
42. These datasets were chosen with the intention of
having a collection of data of varying complexities to
test the strength of inductive orientation similarities
across diverse datasets. All datasets contain at least
1000 instances. For some datasets, feature engineer-
ing was used to encode categorical features as either
numerical values or one-hot vectors. To shorten the
estimation time for the inductive orientation vectors,
non-binary classification datasets were converted into
binary classification problems in a way that balanced
the number of instances in each class.
Table 1: Datasets, their sizes, the size m of the subset used to
train the learning algorithms, and dataset complexity ratios
(CR, described in the main text).
Dataset Size m CR
Obesity 2111 211 0.081
Letter Recognition 1609 260 0.254
Wine Quality 6496 500 0.345
Abalone 4176 417 0.747
Shopper’s Intention 12245 600 0.769
EEG Eye State 14980 600 0.780
Car Evaluation 1728 170 0.916
Bank Marketing 11162 500 0.980
Random 1609 260 1.004
Spam 4601 460 1.073
For each of the 10 datasets and for each algo-
rithm selected, we estimated the corresponding induc-
tive orientation vector using the following scheme: a
holdout set of 5 instances, 800 subsets sampled from
the training set (using the process outlined in Section
4.1), and 20 runs on the same data subset; namely,
N = 5, K = 800, and R = 20. Empirically, we found
that using 800 subsets led to more stable inductive
orientation vectors with low variance, and increasing
the number of subsets further did not significantly de-
crease variance. For a given dataset, all algorithms
were trained on a subset of the data of the same size.
The size of the training subset depends on the dataset
(refer to Table 1 for details). For smaller datasets, the
number of instances per subset was reduced to avoid
significant overlap between subsets.
We measured each dataset’s complexity by com-
puting the ratio of the average Euclidean distance be-
tween a point and its nearest neighbor of the same
class to the average distance between a point and its
nearest neighbor of a different class, as shown in Ta-
ble 1. A lower ratio suggests the dataset is more struc-
tured and likely to be separable with a simple decision
boundary. A higher ratio means the relationships be-
tween different classes are more complex. For large
datasets, it is computationally expensive to compute
the distance between every point, so a random sub-
sample of 6,900 elements was used. Further discus-
sion of this estimate of data complexity can be found
in other sources (Rong et al., 2021) and Section 4.2.
4.2 Results and Discussion
We now present results regarding the basic character-
istics of inductive orientation vectors as well as some
analysis of their values. For a depiction of the induc-
tive orientation vectors relative to the Bank Marketing
dataset, refer to Figure 2.
Inductive orientation vectors can differ greatly be-
tween datasets and between algorithms. For exam-
ple, the inductive orientation vectors relative to the
datasets Car Evaluation, Letter Recognition, Obesity,
and Wine Quality are more sparse than those relative
to Abalone, Bank Marketing, EEG Eye State, Ran-
dom, and Shopper’s Intention. This sparseness oc-
curs when an algorithm consistently predicts the same
element in Ω even when trained on different subsets
of the original training data. An algorithm that pre-
dicts in a similar manner across varying training sub-
sets suggests that the algorithm is able to generalize
to data outside its training subset, since each training
subset is randomly generated and typically different.
Sparse inductive orientation vectors tend to corre-
spond with datasets of lower complexity (cf. Table 1).
This trend suggests algorithms do not capture the gen-
eral trends in the data for datasets of high complex-
ity, leading to more varied predictions and a spread
out probability distribution. While this trend gener-
ally holds true, there are some deviations. For exam-
ple, while the dataset Spam has a complexity ratio of
1.073 (which exceeds even the Random dataset), its
inductive orientation vectors are more sparse than that
of Random. This is most likely because the complex-
ity ratio is not a perfect measure of dataset complex-
ity. The same can be said for the spareness of induc-
tive orientation vectors relative to the Car Evaluation
dataset. Based on this ratio, points in the dataset Spam
are closer to points of a different class than points of
the same class. Even so, a relationship could still be
detected in the data, causing the vectors to be more
sparse than those of the Random dataset. A randomly
generated dataset, however, clearly has no existing
pattern, so its inductive orientation vectors are uni-
form. Since most other datasets match our expecta-
tions, we generally attribute sparseness in inductive
orientation vectors to lower complexity in datasets.
We also confirm that different instances of the
same algorithm typically have closely related induc-
tive orientation vectors, despite having different hy-
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
358
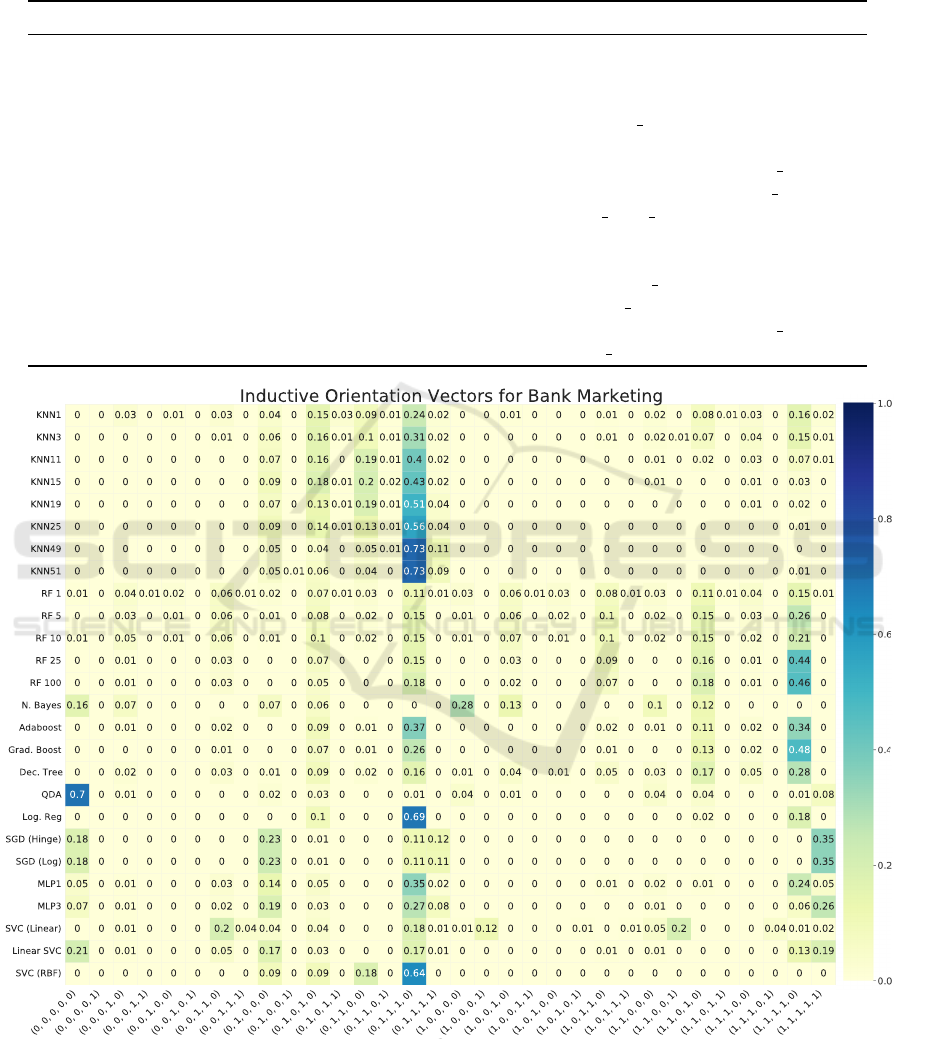
Table 2: Machine learning algorithms and their parameters. Note that SGD Classifiers refer to classifiers that are optimized
by Stochastic Gradient Descent. The base algorithm of SGD (Hinge) Classifier is a linear support vector machine and that of
SGD (Log) is logistic regression.
Algorithm Name Abbreviation Hyperparameters
Adaboost Adaboost
Decision Tree Dec. Tree
Gradient Boosting Grad. Boost.
k-Nearest Neighbors KNN n neighbors (k): 1, 3, 11, 15,
19, 25, 49, 51
Logistic Regression Log. Reg. max iter:2000
Multi-layer Perceptron MLP(1,3) max iter:2000,
hidden layer sizes:(100), (150,100,50)
Guassian Naive Bayes N. Bayes
Quadratic Discriminant Analysis QDA
Random Forest RF n estimators:1,5,10,25,100
Stochastic Gradient Descent Classifier SGD (Hinge, Log) max iter:2000, loss:‘hinge’, ‘log’
Linear Support Vector Classifier Linear SVC max iter:2000
Support Vector Classifier SVC (Linear/RBF) max iter:2000, kernel:‘linear’, ‘rbf’
Figure 2: Inductive orientation vectors of algorithms trained on the Bank Marketing Dataset (Note that each 5-tuple corre-
sponds to a particular way of classifying the elements in the holdout set. Each 5-tuple is in the search space Ω).
Vectorization of Bias in Machine Learning Algorithms
359

Figure 3: Out-of-bag error of Random Forest decreases as
number of trees increase for the Bank Marketing Dataset.
perparameters. We see this with the P
D
vectors rel-
ative to the Bank Marketing dataset, with the excep-
tion of the SVCs. For example, KNNs and Random
Forests concentrate their probability mass on the la-
beling (0,1,1,1,0), SGD Classifiers concentrate their
probability mass on (1,1,1,1,1), and MLPs concen-
trate their probability mass on (0,1,1,1,0). Although
changing the hyperparameters does lead to changes in
the probability distribution over Ω, the overall shapes
of the distributions across different instances of the
same algorithm are relatively stable, which means
that P
D
vectors of instances of the same algorithm
are generally distinct from that of other algorithms.
This suggests that, in many cases, changing the hy-
perparameters of an algorithm may not fundamentally
change the algorithm.
Analyzing the P
D
vectors of KNN relative to the
Bank Marketing dataset, we notice a positive corre-
lation between the number of neighbors k and the
amount of probability mass concentrated at the label-
ing (0,1,1,1,0). As k increases from 1 to 51, the proba-
bility mass on (0,1,1,1,0) increases from 0.24 to 0.73,
which means that KNN becomes more consistent in
its predictions for larger values of k. This is because,
as KNN considers increasingly larger neighborhoods
of data to make its prediction, it becomes less affected
by changes in data as well as noise. Taken to the
extreme, when it considers the entire training subset
as its neighborhood, KNN will be biased towards the
majority class, if the KNN instance assigns uniform
weighting to each neighbor. In contrast, KNNs with
smaller values of k are highly sensitive to changes
in data, causing variations in their predictions. This
is reflected in the P
D
vectors of KNN1 and KNN3
whose probability mass are distributed more evenly
across Ω. These conclusions based on the inductive
orientation vectors confirm that the choice of k plays
a key role in how KNN will perform given a dataset.
A similar trend can be seen with the P
D
vectors of
Random Forest. Random Forest builds a forest of de-
cision trees by selecting a random subset of training
features and a different bootstrap sample of the train-
ing data for every tree. Thus, between different runs
of Random Forest 1, which consists of only one tree,
the bootstrap sample and training features selected are
likely to differ, making the algorithm highly sensi-
tive to variations in data. However, as the number of
trees in a Random Forest model increases, it is able to
generalize better and, thus, predict more consistently.
From Figure 3, we see that the out-of-bag (OOB) er-
ror (a measure of accuracy of a Random Forest model)
decreases as the number of trees increases, indicating
that Random Forest models with more trees are more
accurate. This correlates with our observation of the
P
D
vectors that as the number of trees increases, Ran-
dom Forest concentrates increasingly more probabil-
ity mass on the label it believes is correct. Thus, the
inductive orientation vectors are consistent with ex-
isting knowledge of these algorithms and can provide
new insights for algorithms that are less well-studied.
5 CLUSTERING
5.1 Method
Examining and comparing inductive orientation vec-
tors can become difficult and impractical when the
number of classes and/or holdout set size increases.
Thus, a more effective way of identifying similarities
between algorithms is by analyzing cluster plots.
Cluster plots are generated in three steps: clus-
tering, dimensionality reduction, and plotting. We
cluster at the original dimension R
32
to preserve re-
lationships between inductive orientation vectors. We
used Meanshift as our clustering algorithm, avoid-
ing the need to specify the number of clusters or
set any hyperparameters; using Scikit-learn’s defaults
(Pedregosa et al., 2011) generally produced clusters
consistent with our expectations. Another advantage
of Meanshift is its ability to handle high-dimensional
data using Locality Sensitive Hashing (Cui et al.,
2011) which may be useful when working with in-
ductive orientation vectors of higher dimensions, al-
though it was not used in this study. To visualize the
vectors, we reduce the vectors using Principal Com-
ponent Analysis (PCA) to two dimensions. We use
PCA instead of other dimensionality reduction meth-
ods, such as t-SNE and UMAP, because PCA is not
stochastic, making it simpler to analyze. Having re-
duced the vectors to two dimensions, we plot them
and label them according to how they were clustered
in the original dimension. Note that the resulting clus-
ters in the plots may diverge slightly from how we
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
360

might cluster the vectors in two dimensions because
the clusters were first formed in the original space.
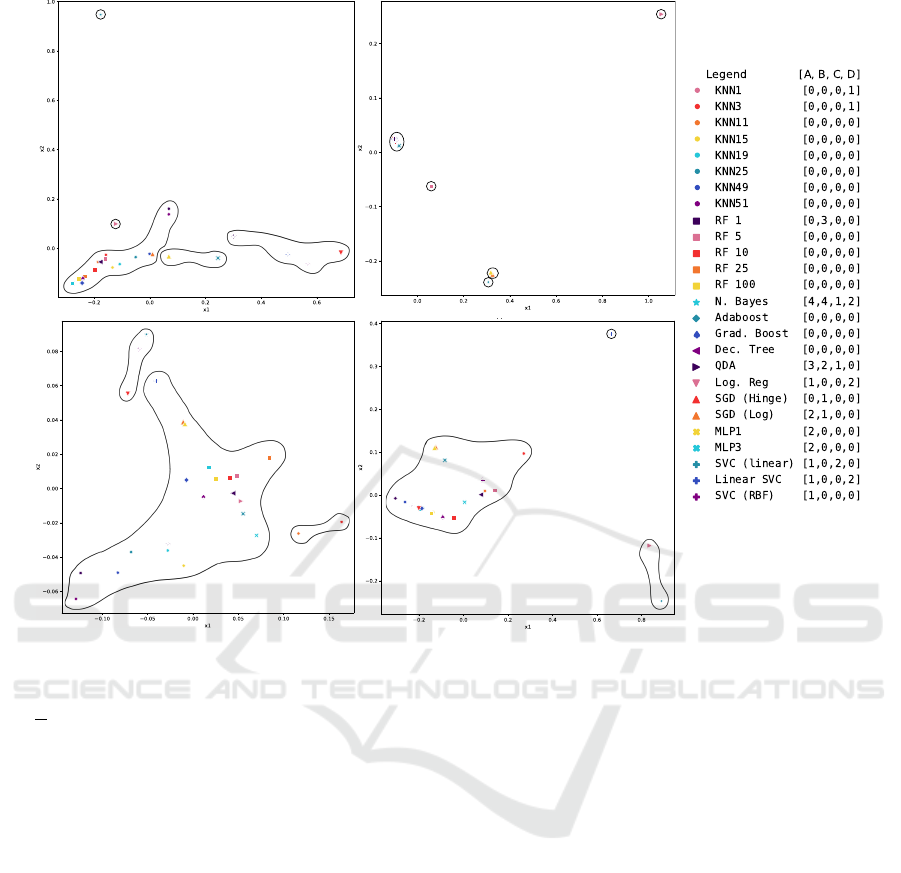
5.2 Results and Discussion
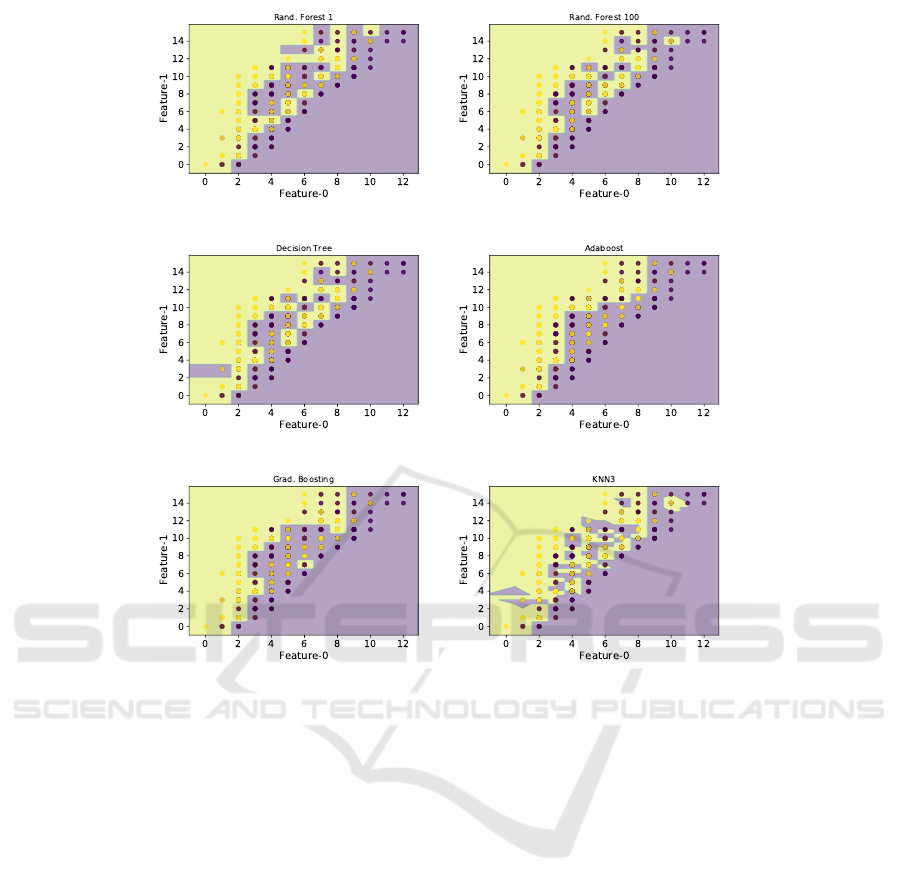
Across cluster plots, we observe that instances of
Random Forest, Decision Tree, Adaboost, and Gradi-
ent Boosting are consistently clustered together. This
is expected because these algorithms are all well-
known tree-based algorithms, extending and combin-
ing various implementations of decision trees. They
also all have axis-aligned decision boundaries, as seen
in Figure 5. Thus, it appears that similarities between
their inductive orientation vectors are a result of their
shared tree-based implementation. Furthermore, most
or all of the instances of the KNN and Random Forest
are clustered together in every plot. Existing research
supports this relationship, as Lin and Jeon classify
both algorithms as variants of weighted neighborhood
schemes (Lin and Jeon, 2006). In Figure 5, we also
see that they have somewhat similar decision bound-
aries. These findings suggest that cluster plots can un-
cover similarities between algorithms and, thus, are a
useful tool for directing further research.
We note that datasets with more structure like
Obesity and Letter Recognition have visually tighter
clusters, compared to unstructured datasets like Ran-
dom. Such analysis is limited since the scale of the
axes is generated by PCA for a specific collection of
inductive orientation vectors and, thus, not directly
comparable between plots.
6 BENCHMARK DATA SUITE
(BDS)
6.1 Method
While cluster plots are an effective way of visually
comparing inductive orientation vectors, the Bench-
mark Data Suite (BDS) matrix is a more precise com-
parison metric. This metric is based on pairwise
distances between inductive orientation vectors esti-
mated relative to the same dataset.
Definition 6.1 (Pairwise Distance). For a pair of in-
ductive orientation vectors P
D,A
and P
D,B
, the pair-
wise distance is the square of the Euclidean distances
between the vectors. Formally,
d(P
D,A
,P
D,B
) =
|Ω|
∑
i=1
(P
[i]
D,A
− P
[i]
D,B
)
2
(9)
where D is the data-generating distribution, i is the in-
dex, and |Ω| is the size of the search space and length
of the inductive orientation vector. Note that A and B
can be two separate learning algorithms or the same
learning algorithm with different parameterizations.
An algorithm’s BDS matrix is a matrix whose
columns are made up of pairwise distances between
the inductive orientation vector of the algorithm in
question and a set of learning algorithms all trained
on a particular dataset. The number of columns is
equal to the number of benchmark datasets, and each
column is relative to a different dataset. To balance
the influence of each dataset while preserving the rel-
ative distance between algorithms’ inductive orienta-
tion vectors for each dataset, we normalize each col-
umn of the BDS matrix by dividing by the corre-
sponding maximum pairwise distance. These scaling
factors are stored in a normalization vector. By multi-
plying the columns of a normalized BDS matrix with
its corresponding scaling factor in the normalization
vector, we can recover the unnormalized BDS matrix.
Given a set of learning algorithms A and a set of
datasets B, we present the following pseudocode to
find the BDS of a fixed algorithm A
∗
∈ A.
Algorithm 2: Benchmark Data Suite.
1: for all b ∈ B do
2: for all A ∈ A do
3: Compute the P
D,A
when trained on subsets of the
dataset b.
4: end for
5: for all A ∈ A \A
∗
do
6: Compute d(P
D,A
,P
D,A
∗
) and insert into matrix.
7: end for
8: BDS ← Normalize the pairwise distances.
9: end for
10: Return BDS
6.1.1 Mean Pairwise Distance Vector
From the BDS matrix, we take the average across the
columns to produce a mean pairwise distance vector.
This aggregate vector reveals which relationships be-
tween inductive orientations hold across datasets and
which hold true for only a dataset. We sort this mean
distance vector by the average distance to more con-
veniently identify relationships between algorithms.
6.2 Results
Using the inductive orientation vectors presented in
Section 4.2, we generate mean pairwise distance vec-
tors for each of our algorithms.
The first two columns of Table 3 show the sorted
mean pairwise distance vector of KNN11 which is
mostly representative of other instances of KNN. We
observe that, on average, the algorithms closest to
Vectorization of Bias in Machine Learning Algorithms
361
.
3
2
0
1
4
AbaloneA.
3
2
1
0
4
Obesity
B.
1
2
0
RandomC.
0
2
1
Shopper’s Intention
D.
1
1
Figure 4: Cluster plots of inductive orientation vectors using the Meanshift algorithm to cluster in the original dimensions and
PCA for dimensionality reduction. Boundaries around the plotted inductive orientations were added manually according to
the labels generated by Meanshift.
the P
D
of the KNN of interest are other instances
of KNN, specifically those with similar values of k.
Even so, not all instances of KNN may be close to
the KNN of interest. For example, KNN1 is one of
the furthest algorithms from KNN11. In general, in-
stances of KNN, Random Forest and other tree based
algorithms are the closest, followed by MLPs, and
then a mixture of SVCs and SGDs. The furthest algo-
rithms from KNN are QDA and Naive Bayes, which
we also observed in Section 5.2.
Considering Random Forest 100, we find its near-
est algorithms are other instances of Random Forests
and Gradient Boosting. While both are types of boost-
ing, Gradient Boosting is consistently closer to in-
stances of Random Forest, excluding Random Forest
1, than Adaboost, suggesting greater similarities be-
tween the inductive biases of Gradient Boosting and
Random Forest. Of all instances of Random For-
est, Random Forest 1 is always furthest away from
the Random Forest of interest. This is likely because
Random Forest 1 makes its predictions based on a sin-
gle tree, unlike the other more extensive instances of
Random Forest. Besides a mixture of tree-based algo-
rithms, KNNs are relatively close, followed by MLPs,
Logistic Regression, and SVCs. Similar to the results
from KNN 11, QDA and Naive Bayes are the farthest
away from Random Forest 100. Although their mean
distance vectors are not shown, Adaboost and Gradi-
ent Boosting are closer to each other than to Random
Forest, likely because both are boosting algorithms.
Lastly, we notice that Naive Bayes, similar to SVC
with a linear kernel, is relatively far from all other al-
gorithms since the distances in the mean distance vec-
tor, on average, are much greater than those of other
algorithms. Of all algorithms, QDA’s inductive orien-
tation is most similar to that of Naive Bayes; even so,
their pairwise distance is still relatively large. Both
Naive Bayes and QDA are probabilistic models lever-
aging Bayes’ Theorem. However, Naive Bayes makes
an assumption that all input features are condition-
ally independent, while QDA does not. Essentially,
Naive Bayes is a simplified version of QDA (Ghojogh
and Crowley, 2019), which explains the large pair-
wise distance when the input features are correlated
and thus not conditionally independent.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
362
(a) Random Forest1. (b) Random Forest100.
(c) Decision Tree. (d) Adaboost.
(e) Gradient Boosting. (f) KNN3.
Figure 5: Example decision boundaries for two selected features for axis-aligned algorithms and KNN3. The data is generated
using the first two features (x and y position of the box bounding the handwritten letter).
6.3 Discussion
Overall, the sorted mean pairwise distance vectors
match our conclusions from analyzing the raw induc-
tive orientation vectors and cluster plots. As men-
tioned previously, the mean distance vectors reveal
that different instances of the same algorithm tend to
be similar. Furthermore, cluster memberships are of-
ten reflected in the mean distance vectors. Most no-
tably, Naive Bayes and QDA, both of which are often
clustered on their own, also appear distant to other al-
gorithms according to the pairwise distance vectors.
Calculated based on pairwise distances, the mean
distance vector is limited in its ability to reflect
changes in how probability mass is distributed over
Ω. In Section 4.2, we noted an increase in the amount
of probability mass concentrated on a particular la-
beling as the number of neighbors (for KNN) and the
number of trees (for Random Forest) increased. This
trend, revealing how different hyperparameter values
affect the distribution over Ω, is difficult to observe
when analyzing the sorted mean distance vector con-
sisting of only pairwise distances. For example, con-
sider again the mean distance vector of KNN11. Al-
though we can conclude that KNN15, KNN19, and
KNN25 are closer to KNN11 than KNN3, KNN49,
and KNN51, we are unaware of why instances of
KNN are not all close, in terms of pairwise distances.
On the other hand, if we examine the raw induc-
tive orientations, we see that, KNN49 and KNN51
concentrate more mass at (0,1,1,1,0) than KNN11,
whereas KNN3 has less. Furthermore, KNN1, ac-
cording to the mean distance vector, would be consid-
ered to be unrelated to KNN11 because its relation-
ship to KNN11 is overshadowed by its large pairwise
distance to KNN11. Thus, the mean distance vector
obscures some subtle patterns in the algorithms’ be-
havior. Even so, the limitations of mean pairwise vec-
tors can be overcome when used in conjunction with
cluster plots and analysis of the inductive orientation
vectors themselves.
Regardless, the mean distance vector is a power-
ful tool that provides a ranking of how similar other
algorithms are to an algorithm of interest based on
Vectorization of Bias in Machine Learning Algorithms
363

Table 3: Sorted mean pairwise distance vectors for KNN11, Random Forest 100, and Naive Bayes. Algorithms with smaller
distances are sorted to be near the top.
KNN 11 Random Forest 100 Naive Bayes
Algorithm Name d(P
D
A
,P
D
B
) Algorithm Name d(P
D
A
,P
D
B
) Algorithm Name d(P
D
A
,P
D
B
)
KNN15 0.007 RF 25 0.007 QDA 0.272
KNN19 0.020 Grad. Boost. 0.038 RF 5 0.320
KNN25 0.037 RF 5 0.044 Linear SVC 0.344
RF 25 0.064 RF 10 0.053 MLP3 0.350
RF 5 0.072 KNN11 0.080 MLP1 0.353
RF 100 0.075 KNN15 0.082 SGD (Hinge) 0.360
Grad. Boost. 0.085 Adaboost 0.091 SGD (Log) 0.364
RF 10 0.098 KNN19 0.111 KNN11 0.365
Adaboost 0.102 Dec. Tree 0.126 RF 10 0.370
MLP1 0.115 KNN25 0.138 RF 25 0.374
KNN3 0.118 KNN3 0.143 KNN15 0.377
KNN51 0.119 MLP1 0.143 Dec. Tree 0.378
MLP3 0.123 MLP3 0.157 SVC (Linear) 0.379
KNN49 0.124 KNN51 0.227 KNN19 0.387
Dec. Tree 0.144 KNN49 0.239 Grad. Boost. 0.393
Log. Reg. 0.202 Log. Reg. 0.241 Adaboost 0.398
Linear SVC 0.233 Linear SVC 0.249 KNN3 0.402
SVC (RBF) 0.241 RF 1 0.253 KNN25 0.405
SGD (Hinge) 0.250 SGD (Hinge) 0.270 RF 100 0.409
SGD (Log) 0.251 SGD (Log) 0.272 RF 1 0.432
RF 1 0.262 KNN1 0.309 KNN51 0.446
KNN1 0.287 SVC (RBF) 0.309 KNN49 0.451
SVC (Linear) 0.362 SVC (Linear) 0.385 Log. Reg. 0.494
QDA 0.430 QDA 0.454 KNN1 0.502
N. Bayes 0.454 N. Bayes 0.463 SVC (RBF) 0.507
pairwise distances aggregated across datasets. Since
the inductive biases of algorithms are captured in their
respective inductive orientations (used in calculating
pairwise distances), the mean distance vector allows
us to gauge whether (and/or which) algorithms have
similar inductive biases as the algorithm of interest.
Accounting for all relationships across datasets, the
mean distance vector is a reliable and quantitative way
of comparing algorithms. This is because an algo-
rithm must be consistently close, in terms of pair-
wise distance, to the algorithm of interest across all
datasets for it to also be close in the resulting mean
distance vector. Additionally, connections between
algorithms, such as QDA and Naive Bayes, would be
difficult to establish through a cluster plot, especially
since the coordinate distances between algorithms can
be distorted in the process of dimensionality reduc-
tion. These difficulties, however, are avoided when
using mean distance vectors.
Lastly, although not explored in-depth here, the
BDS matrix is a versatile tool of which many aspects
of the BDS matrix can be modified, namely, the nor-
malization method, set of benchmark datasets, set of
algorithms, aggregation method, and even the pair-
wise distance metric. In these ways, the BDS matrix
can be adapted for many other applications.
7 CONCLUSION
We develop a method to estimate the inductive ori-
entation vector of a classification algorithm using a
modified Labeling Distribution Matrix (LDM). The
inductive orientation captures an algorithm’s induc-
tive bias relative to a certain dataset, providing an em-
pirical basis for algorithm comparison. These vectors
allow us to confirm several known similarities among
existing algorithms, and this method therefore holds
promise for characterizing novel algorithms. Induc-
tive orientation vectors allow us to study the effects of
algorithm hyperparameterization in a consistent way
across algorithms. We explore inductive orientations
visually using cluster plots and numerically using the
Benchmark Data Suite, a particularly helpful foun-
dation for studying algorithmic relationships across
many diverse datasets.
Importantly, the LDM can used to calculate induc-
tive orientation vectors for arbitrary black-box classi-
fication algorithms. While our estimation procedure
was developed in this case for binary classification
algorithms, regression and general search algorithms
also produce inductive orientation vectors (Monta
˜
nez,
2017). Adapting these methods for non-classification
algorithms is the subject of future work. By com-
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
364

paring the biases of new algorithms to known biases
of existing algorithms, we can provide a point of ref-
erence for comparing algorithm biases and inductive
assumptions. Making biases explainable and measur-
able is of growing importance, given the increasing
use of complex, overparameterized models such as
deep neural networks. Inductive orientation vectors
provide a quantitative tool for measuring and compar-
ing inductive biases across algorithms.
ACKNOWLEDGEMENTS
This research was supported in part by the National
Science Foundation under Grant No. 1950885. Any
opinions, findings, or conclusions are those of the au-
thors alone, and do not necessarily reflect the views
of the National Science Foundation.
REFERENCES
Baati, K. and Mohsil, M. (2020). Real-Time Prediction
of Online Shoppers’ Purchasing Intention Using Ran-
dom Forest. In IFIP International Conference on Arti-
ficial Intelligence Applications and Innovations, pages
43–51. Springer.
Bashir, D., Monta
˜
nez, G. D., Sehra, S., Sandoval Segura,
P., and Lauw, J. (2020). An Information-Theoretic
Perspective on Overfitting and Underfitting. Aus-
tralasian Joint Conference on Artificial Intelligence
(AJCAI 2020).
Brown, T. B., Mann, B., Ryder, N., Subbiah, M., Kaplan, J.,
Dhariwal, P., Neelakantan, A., Shyam, P., Sastry, G.,
Askell, A., et al. (2020). Language Models are Few-
Shot Learners. arXiv preprint arXiv:2005.14165.
Caruana, R. and Niculescu-Mizil, A. (2006). An Empirical
Comparison of Supervised Learning Algorithms. In
Proceedings of the 23rd international conference on
Machine learning, pages 161–168.
Cortez, P., Cerdeira, A., Almeida, F., Matos, T., and Reis, J.
(2009). Modeling Wine Preferences by Data Mining
from Physicochemical Properties. Decision support
systems, 47(4):547–553.
Cui, Y., Cao, K., Zheng, G., and Zhang, F. (2011). An
Adaptive Mean Shift Algorithm Based on LSH. Pro-
cedia Engineering, 23:265–269.
Dua, D. and Graff, C. (2017). UCI Machine Learning
Repository.
Ghojogh, B. and Crowley, M. (2019). Linear and Quadratic
Discriminant Analysis: Tutorial. arXiv preprint
arXiv:1906.02590.
Gonen, H. and Goldberg, Y. (2019). Lipstick on a Pig: De-
biasing Methods Cover up Systematic Gender Biases
in Word Embeddings But do not Remove Them. arXiv
preprint arXiv:1903.03862.
Lauw, J., Macias, D., Trikha, A., Vendemiatti, J., and
Monta
˜
nez, G. D. (2020). The Bias-Expressivity
Trade-off. In Proceedings of the 12th International
Conference on Agents and Artificial Intelligence - Vol-
ume 2, pages 141–150. SCITEPRESS.
Lin, Y. and Jeon, Y. (2006). Random Forests and Adaptive
Nearest Neighbors. Journal of the American Statisti-
cal Association, 101(474):578–590.
Mikolov, T., Sutskever, I., Chen, K., Corrado, G. S.,
and Dean, J. (2013). Distributed Representations of
Words and Phrases and their Compositionality. In
Advances in Neural Information Processing Systems,
pages 3111–3119.
Mitchell, T. M. (1980). The Need for Biases in Learning
Generalizations. Department of Computer Science,
Laboratory for Computer Science Research, Rutgers
Univ.
Monta
˜
nez, G. D. (2017). The Famine of Forte: Few Search
Problems Greatly Favor Your Algorithm. In Systems,
Man, and Cybernetics (SMC), 2017 IEEE Interna-
tional Conference on, pages 477–482. IEEE.
Monta
˜
nez, G. D., Bashir, D., and Lauw, J. (2021). Trad-
ing Bias for Expressivity in Artificial Learning. In
Agents and Artificial Intelligence, pages 332–353,
Cham. Springer International Publishing.
Monta
˜
nez, G. D., Hayase, J., Lauw, J., Macias, D., Trikha,
A., and Vendemiatti, J. (2019). The Futility of Bias-
Free Learning and Search. In 32nd Australasian Joint
Conference on Artificial Intelligence, pages 277–288.
Springer.
Moro, S., Cortez, P., and Rita, P. (2014). A Data-Driven Ap-
proach to Predict the Success of Bank Telemarketing.
Decision Support Systems, 62:22–31.
Osisanwo, F., Akinsola, J., Awodele, O., Hinmikaiye,
J., Olakanmi, O., and Akinjobi, J. (2017). Super-
vised Machine Learning Algorithms: Classification
and Comparison. International Journal of Computer
Trends and Technology (IJCTT), 48(3):128–138.
Palechor, F. M. and de la Hoz Manotas, A. (2019).
Dataset for Estimation of Obesity Levels Based on
Eating Habits and Physical Condition in Individuals
from Colombia, Peru and Mexico. Data in brief,
25:104344.
Pedregosa, F., Varoquaux, G., Gramfort, A., Michel, V.,
Thirion, B., Grisel, O., Blondel, M., Prettenhofer, P.,
Weiss, R., Dubourg, V., Vanderplas, J., Passos, A.,
Cournapeau, D., Brucher, M., Perrot, M., and Duch-
esnay, E. (2011). Scikit-learn: Machine Learning
in Python. Journal of Machine Learning Research,
12:2825–2830.
Rong, K., Khant, A., Flores, D., and Monta
˜
nez, G. D.
(2021). The Label Recorder Method: Testing the
Memorization Capacity of Machine Learning Mod-
els. In The Seventh International Conference on
Machine Learning, Optimization, and Data Science
(LOD 2021).
Runarsson, T. P. and Yao, X. (2005). Search Biases in Con-
strained Evolutionary Optimization. IEEE Transac-
tions on Systems, Man, and Cybernetics, Part C (Ap-
plications and Reviews), 35(2):233–243.
Sandoval Segura, P., Lauw, J., Bashir, D., Shah, K., Sehra,
S., Macias, D., and Monta
˜
nez, G. D. (2020). The
Labeling Distribution Matrix (LDM): A Tool for Es-
timating Machine Learning Algorithm Capacity. In
Proceedings of the 12th International Conference on
Agents and Artificial Intelligence - Volume 2, pages
980–986. SCITEPRESS.
Vectorization of Bias in Machine Learning Algorithms
365
