
Generalizable Online 3D Pedestrian Tracking with Multiple Cameras
Victor Lyra
1 a
, Isabella de Andrade
2
, Jo
˜
ao Paulo Lima
2,1 b
, Rafael Roberto
1
, Lucas Figueiredo
3,1 c
,
Jo
˜
ao Marcelo Teixeira
4,1
, Diego Thomas
5 d
, Hideaki Uchiyama
6 e
and Veronica Teichrieb
1 f
1
Voxar Labs, Centro de Inform
´
atica, Universidade Federal de Pernambuco, Recife, Brazil
2
Departamento de Computac¸
˜
ao, Universidade Federal Rural de Pernambuco, Recife, Brazil
3
Unidade Acad
ˆ
emica de Belo Jardim, Universidade Federal Rural de Pernambuco, Belo Jardim, Brazil
4
Departamento de Eletr
ˆ
onica e Sistemas, Universidade Federal de Pernambuco, Recife, Brazil
5
Faculty of Information Science and Electrical Engineering, Kyushu University, Fukuoka, Japan
6
NARA Institute of Science and Technology, Nara, Japan
Keywords:
Tracking, Detection, Multiple Cameras, Pedestrians.
Abstract:
3D pedestrian tracking using multiple cameras is still a challenging task with many applications such as
surveillance, behavioral analysis, statistical analysis, and more. Many of the existing tracking solutions involve
training the algorithms on the target environment, which requires extensive time and effort. We propose
an online 3D pedestrian tracking method for multi-camera environments based on a generalizable detection
solution that does not require training with data of the target scene. We establish temporal relationships
between people detected in different frames by using a combination of graph matching algorithm and Kalman
filter. Our proposed method obtained a MOTA and MOTP of 77.1% and 96.4%, respectively on the test split
of the public WILDTRACK dataset. Such results correspond to an improvement of approximately 3.4% and
22.2%, respectively, compared to the best existing online technique. Our experiments also demonstrate the
advantages of using appearance information to improve the tracking performance.
1 INTRODUCTION
Tracking a great number of pedestrians in a large area
is a challenging task that has received a lot of atten-
tion in the reserach community because of its poten-
tial application to security applications, surveillance,
and behavioral analysis. Standard RGB cameras are
often used to monitor large urban areas because of
their low price, easy (re-)deployment and wide range
of application possibilities. As a consequence, the
standard problem is how to track pedestrians from one
(or multiple) 2D video(s) of a target scene.
Pedestrian tracking solutions can use single or
multiple cameras. Using a single camera brings chal-
lenges such as imprecise 3D estimation, difficulty in
a
https://orcid.org/0000-0003-3508-3486
b
https://orcid.org/0000-0002-1834-5221
c
https://orcid.org/0000-0001-9848-5883
d
https://orcid.org/0000-0002-8525-7133
e
https://orcid.org/0000-0002-6119-1184
f
https://orcid.org/0000-0003-4685-3634
covering a large area, crowd tracking, and occlusions,
resulting in information loss and can produce ambi-
guity on trajectory interpretation. On the other hand,
using multiple cameras with overlapping views makes
3D tracking possible even in these challenging scenar-
ios. In addition, the available area for tracking is in-
creased, and it is easier to deal with occlusions since
different cameras can better view the occluded per-
sons.
By its turn, tracking pedestrians with multiple
cameras leads to other challenges. For instance,
it is necessary to identify individuals consistently
through multiple views, requiring a higher computa-
tional power given that more images are used as in-
put. Therefore, many existing solutions that use this
approach were developed to work offline (Zhu, 2019),
meaning that all available data is used as input at once
after all observed events occur. It opposes online so-
lutions that process data as they are obtained, being
able to work in real-time and provide helpful infor-
mation for interactions with ongoing activities on the
monitored area.
820
Lyra, V., de Andrade, I., Lima, J., Roberto, R., Figueiredo, L., Teixeira, J., Thomas, D., Uchiyama, H. and Teichrieb, V.
Generalizable Online 3D Pedestrian Tracking with Multiple Cameras.
DOI: 10.5220/0010842800003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
820-827
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Furthermore, many state-of-the-art solutions that
use deep learning techniques have to train on the tar-
get dataset (Vo et al., 2020). The consequence is that
the solution has to be trained again in every change
of scenario. In other words, it is not generalizable.
Moreover, such a training procedure often demands
significant efforts to annotate ground-truth data and a
considerable amount of processing time.
In this context, we propose an online and gener-
alizable 3D pedestrian tracking solution based on a
generalizable multi-camera detection solution (Lima
et al., 2021) and a multi-camera tracking approach in-
spired by the SORT single-camera tracking algorithm
(Bewley et al., 2016).
Our tracking solution follows the tracking-by-
detection paradigm (Sun et al., 2020b). In this ap-
proach, pedestrians are independently detected in
each frame. These detections are connected with de-
tections of other frames according to their proximity
or similarity, tracing each person’s trajectory. The
tracking procedure takes place on the ground plane,
where we assign identities (IDs) to each pedestrian,
and these IDs are reassigned to the same pedestrians
at a subsequent time. Thus, the routes that each pedes-
trian traveled are formed from the previous locations
of the same ID.
Our contributions are:
• An approach for tracking pedestrian locations
on the ground plane from a generalizable multi-
camera detection solution that adapts the SORT
algorithm to track the ground points while con-
sidering multi-view pedestrian appearance (Sec-
tion 3);
• Comparisons with different configurations of the
distance between pedestrians and the use of his-
tograms or re-identification networks (Section 4);
• Quantitative and qualitative evaluations using
an in-the-wild dataset regarding the proposed
method’s tracking performance concerning state-
of-the-art multi-camera 3D tracking approaches
(Section 4).
2 RELATED WORK
Human tracking as a multi-object tracking (MOT)
problem has been intensively studied. Generally, ex-
isting tracking approaches belong in one of two cate-
gories: single-camera or multi-camera.
2.1 Single-camera Tracking
The literature has primarily discussed the problem
of MOT applied over a set of images from a single
camera. For instance, the MOTChallenge benchmark
(Leal-Taix
´
e et al., 2015) has provided many MOT
challenges each year in different scenes and config-
urations, such as moving or stationary cameras, and a
ranking of the best solutions for each challenge.
There are many tracking-by-detection methods
for single-camera tracking. Some examples are the
SORT algorithm, a solution that uses a Kalman filter
to model the movement of the tracked objects (Bew-
ley et al., 2016), and Deep SORT, which uses asso-
ciation metrics through a re-identification neural net-
work to improve correspondence reliability between
detections at different times (Wojke et al., 2017).
Among the state-of-the-art solutions listed in the
MOTChallenge benchmark, convolution neural net-
works (CNNs) are used in graphs to create an asso-
ciation between persons in different time instants and
therefore track them (Papakis et al., 2020). For exam-
ple, the work of Zhou et al. (2020) used neural net-
works to estimate the offset of each person in an im-
age, tracking them throughout the video (Zhou et al.,
2020).
These methods aim to solve the MOT problem us-
ing only one view of the scene, whereas our approach
uses multiple views from different angles.
2.2 Multi-camera Detection and
Tracking
As mentioned in Section 1, using multiple cameras
has advantages such as better dealing with occlusions
and allowing 3D tracking. However, it can increase
the required computational power since it uses more
images.
You and Jiang (2020) is an example of this ap-
proach, where a neural network is used to directly es-
timate the location of pedestrians in a ground plane
from images for later accomplishing tracking using
bipartite graphs (You and Jiang, 2020). The work
of Vo et al. (2021) uses almost the entire dataset to
train a person descriptor with unsupervised learning,
thus identifying each pedestrian separately (Vo et al.,
2020). Finally, the work of Ong et al. (2020) uses a
generalizable Multi-Bernoulli filter (Vo et al., 2016)
integrated with a Bayesian recursion jointly with a
new system for treating occlusions in multi-camera
environments (Ong et al., 2020).
Some solutions do not fuse detections before
tracking. For example, Chen et al. (2016) and Sun et
al. (2020) propose to execute tracking for each cam-
Generalizable Online 3D Pedestrian Tracking with Multiple Cameras
821
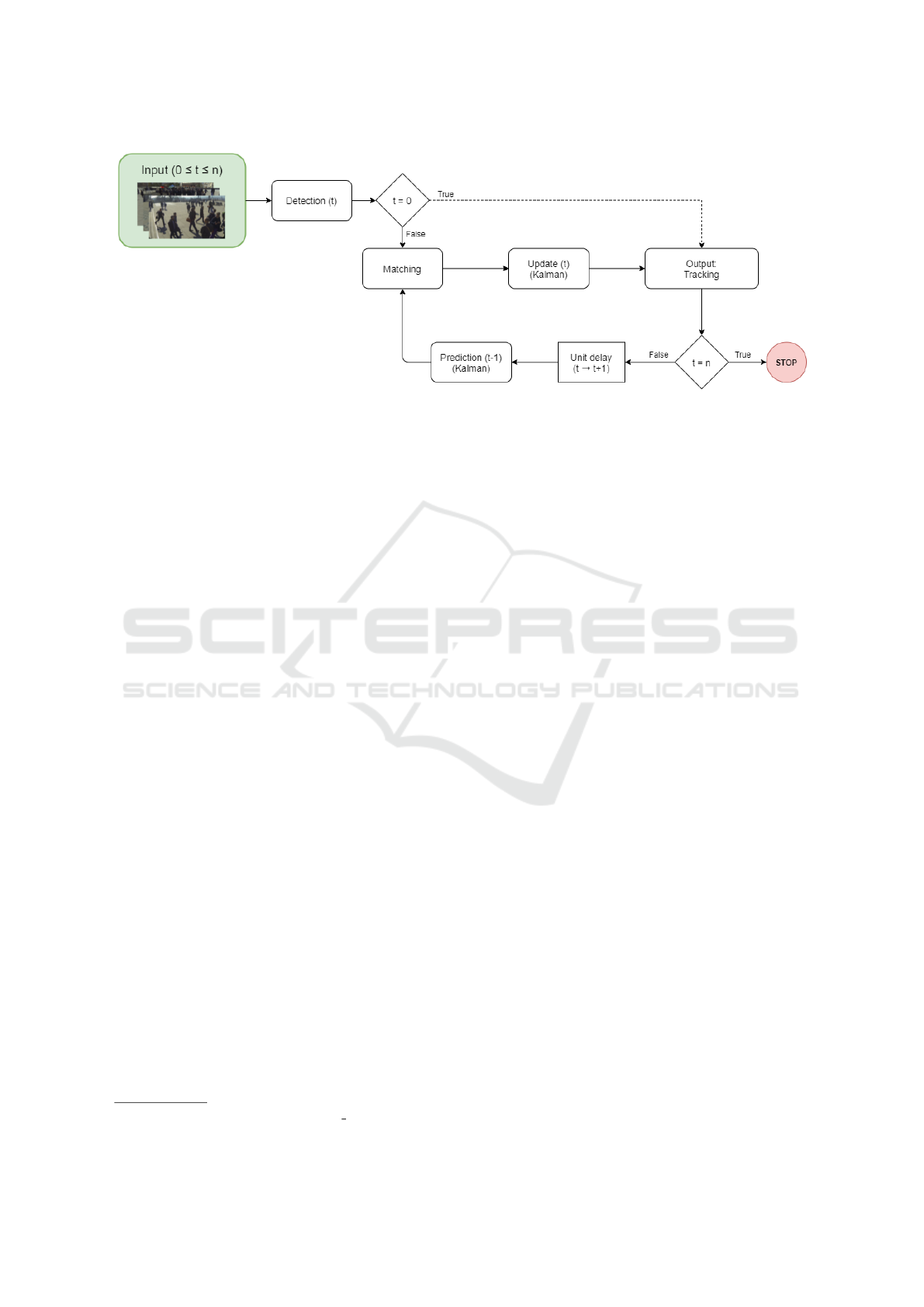
Figure 1: Diagram with the pipeline of our tracking solution, with t being the time and n the number of images in the video.
era individually and later combine the routes of each
pedestrian in a 3D environment (Chen et al., 2016;
Sun et al., 2020a).
However, the problem of tracking using multiple
cameras is still restricted in the literature. Most so-
lutions for this type of problem use deep learning to
detect and track. So, to obtain good results, it is nec-
essary to train in the target dataset previously. There-
fore, most of these solutions do not present a good
result in a change of scenario unless previous training
is performed.
On the other hand, a more generalizable solution
was proposed using deep learning to estimate pedes-
trian skeletons and subsequently using the estimated
heel joints to calculate the ground points for each
pedestrian in each camera (Lima et al., 2021). It is
unnecessary to perform training in the target dataset
for this kind of estimation, therefore being more gen-
eralizable. These points are projected in the same
ground plane, and a graph is created where detections
of different cameras are connected. The positions of
pedestrians are calculated through a clique clover al-
gorithm
1
. However, this solution works without cal-
culating a relation between different times; thus, it
does not perform tracking, just the detection of pedes-
trians.
Our solution uses this generalizable detection to
track the pedestrians, making our solution generaliz-
able compared to the other solutions. It also works in
an online manner, while some others only work with
offline inputs.
1
https://en.wikipedia.org/wiki/Clique cover
3 METHOD
To maximize the accuracy and consistency of our
solution, we used matching algorithms in graphs,
Kalman filter, histograms, and re-identification net-
works. Differently from the SORT algorithm, we
used the Kalman filter on the ground points of the
pedestrians and incorporated multi-camera pedestrian
appearance into the solution. Figure 1 shows the
pipeline of our method.
3.1 Detection
Before tracking pedestrians using multiple cameras,
it is necessary to detect them in each camera and fuse
these detections in each frame. For that, we choose a
generalizable detection method that calculates pedes-
trians’ 3D locations in the ground plane (Lima et al.,
2021). Figure 2 shows two input images with their de-
tections and the ground plane with locations of each
detected pedestrian.
However, as Figure 3 shows, this method of calcu-
lating 3D pedestrian locations does not maintain con-
sistency between detection identities of different time
instants.
Besides the location, for each instant t, we collect
additional information like the color histogram and
the person identification features for each detection.
3.1.1 Re-identification Features
Person re-identification (re-ID) is the problem of rec-
ognizing individuals that appeared on different cam-
eras or in the same camera but on different occasions.
It is a challenging task due to the presence of different
viewpoints, varying low-image resolutions, illumina-
tion changes, and many others (Ye et al., 2021).
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
822

Figure 2: Images of two different cameras that were cap-
tured at the same time with its detections and, at the bottom,
the ground plane with the location of each pedestrian in the
scene.
Figure 3: Detection of pedestrians in subsequent times.
In our problem, images with similar tones are
prone to belong to the same person. We can compare
color tones between different images by calculating
color histograms.
With the histograms of each detection in hand, we
calculate the average histogram defined by
h
avg
=
∑
n
i=1
h
i
n
, (1)
where we sum the histograms h
i
of fused detections
from 1st to n-th camera, then divide by n.
On the other hand, some re-ID solutions are im-
plemented with CNNs, although they can have diffi-
culties dealing with significant changes in the domain
(Song et al., 2019). These networks receive an image
as input, execute the processing and return a feature
vector that describes the image and should be simi-
lar for inputs of the same person. We can calculate
the similarity between different inputs with a distance
measure such as cosine similarity.
Therefore, for the re-ID features extracted using
the pre-trained model of Deep SORT (Wojke et al.,
2017), we also calculate the average described as
f
avg
=
∑
n
i=1
f
i
n
, (2)
where we sum the re-ID features f
i
of fused detections
from 1st to n-th camera, then divide by n.
3.2 Prediction
In order to establish temporal relationships between
detections, a 4 dimension state (x,y, ˙x, ˙y) is defined to
represent a pedestrian, considering (x, y) as the pedes-
trian position and ( ˙x, ˙y) as his/her speed that is initial-
ized as zero. Thereby, the Kalman Filter (Kalman,
1960) is applied to predict the pedestrian location in
the next instant of time.
The prediction step uses the current state of the
system to predict its next state
ˆ
x
n+1,n
=
ˆx
n+1,n
ˆ
˙x
n+1,n
=
ˆx
n,n
+ ∆t
ˆ
˙x
n,n
ˆ
˙x
n,n
(3)
and predict the covariance of the system. For systems
with constant dynamics, we have
p
n+1,n
= p
n,n
. (4)
3.3 Matching
Given the pedestrians predicted locations, we con-
struct a bipartite graph, illustrated in Figure 4, where
vertices are detections predictions for time t − 1 and
new detections of time t. The edges are created only
between detections of different instants, and if the dis-
tance between them is less them a distance threshold
d
max
defined as follows:
d
max
=
v
max
FPS
, (5)
where v
max
is the maximum speed of a pedestrian in
m/s and FPS is the number of images per second of
the input video.
Figure 4: Example of a bipartite graph created with detec-
tions of subsequent times.
For each edge, a weight is calculated through
arithmetic mean considering Euclidean distance
Generalizable Online 3D Pedestrian Tracking with Multiple Cameras
823

(d
e
) between detections, Hellinger distance (d
h
)
(Hellinger, 1909) between histograms, and cosine
similarity (d
c
) between re-ID vectors, thus
p(i, j) = (1 − λ
h
− λ
c
)d
e
(i, j)
+ λ
h
d
h
(i, j) + λ
c
d
c
(i, j), (6)
where i and j are the detections corresponding to
graph vertices and λ
h
and λ
c
are the weights for his-
tograms and re-ID vectors distance, respectively, to
control the effect of each distance over the weight of
graph, considering
0 ≤ λ
h
+ λ
c
≤ 1. (7)
In possession of the created graph, we use an al-
gorithm of maximum matching (Galil, 1986), which
gives a subset of edges without common vertices and
is maximum because it returns a subset with as many
edges as possible. It also considers the weights of the
edges to return a subset where the sum of matched
edges weights has a minimum value.
3.4 Update
With the subset of the edges from the matching algo-
rithm, each edge gives a pair of vertices considered
as the same person. The location of the pedestrian is
updated using the update step of the Kalman filter.
The update combines the prediction of the sys-
tem’s state with a new measurement using a weighted
average. Thus, it makes values with less uncertainty
have greater weight through the Kalman gain K
n
:
K
n
=
P
n,n−1
P
n,n−1
+ r
n
. (8)
Finally, the estimated state and covariance are up-
dated as follows:
ˆx
n,n
= ˆx
n,n−1
+ K
n
(z
n
− ˆx
n,n−1
), (9)
p
n,n
= (1 − K
n
)p
n,n−1
. (10)
If any new detections are not matched, they are
added as new pedestrians in tracking. Moreover, if
any of the already tracked pedestrians is not matched,
the Kalman filter is applied to predict their position,
using it in the subsequent matching, overcoming tem-
porary occlusions. Finally, if the pedestrian does not
match for τ time instants, it is considered that he has
left the scene, as shown in Figure 5.
Therefore, these steps are repeated for each new
frame until there are no more images, for the case of
a pre-recorded video.
Figure 5: Representation of trajectories and the prediction
of the Kalman filter being used for unmatched pedestrians
for τ = 3.
4 RESULTS
We performed experiments on a challenging multi-
camera dataset, obtained quantitative and qualitative
results, and observed the execution time. The results
are presented in the following subsections.
4.1 Dataset and Metrics
The WILDTRACK dataset (Chavdarova et al., 2018),
considered challenging for multiple camera tracking,
was used to evaluate the proposed solution. It consists
of video frames extracted from seven different cam-
eras, recorded on a street with many people, while
providing ground-truth annotations for a total of 400
frames and the camera’s intrinsic and extrinsic param-
eters.
We used the py-motmetrics Python library to per-
form a quantitative evaluation (Heindl, 2017), cal-
culating many different metrics related to the MOT
problem. Among these metrics, the most important
ones are Multiple Object Tracking Accuracy (MOTA)
and Multiple Object Tracking Precision (MOTP)
(Bernardin and Stiefelhagen, 2008).
The MOTA metric shows how consistent the tra-
jectories are, considering mismatches, false positives,
and missing trajectories. On the other hand, the
MOTP metric represents the total error in the esti-
mated position of each tracked object divided by the
number of correspondences between objects across
the video. Thus, it shows the ability to estimate pre-
cise positions for objects independently of keeping
consistent trajectories.
4.2 Tracking Performance Evaluation
As previously mentioned in Subsection 4.1, the tests
were executed using the WILDTRACK dataset. The
maximum speed of the pedestrian, for equation 5, was
defined as 3m/s since no individuals are running and
the average speed of a person walking is 1.5m/s.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
824

Figure 6: Pedestrian tracking results in frame 62 (with transparency) and frame 66 of the WILDTRACK dataset.
Figure 6 shows the tracking result for two frames,
illustrating the location of pedestrians on a ground
plane while displaying the trajectory taken by each
pedestrian. In Figure 7, you can see a sequence of
input frames and the respective pedestrian tracking.
Figure 7: Accurate tracking of three pedestrians walking
side by side.
A quantitative evaluation was performed consider-
ing different weight configurations (Equation 6). The
results are listed in Table 1, with the best results in
bold. Thereby, it is possible to understand that the
greater the weight of the histogram, the worse the re-
sults become. Still, setting a small weight to the his-
togram or re-ID slightly improved MOTA and MOTP.
Furthermore, unlike our solution, supervised tech-
niques have to train on the dataset. Hence the data is
divided into 90% and 10% for training and testing,
respectively. Therefore, the evaluation metrics were
also calculated for the last 40 frames from WILD-
TRACK to compare it with other techniques. Ta-
ble 2 exhibits our solution’s MOTA and MOTP us-
ing only the distance compared to other state-of-the-
art techniques for the subset from the WILDTRACK
dataset. Our solution achieved the highest MOTA and
MOTP being an online approach, while some com-
peting methods are offline.
Table 1: MOTA and MOTP for different weight configura-
tions in graph edges.
Weight Type λ
h
λ
id
MOTA MOTP
Distance 0 0 65.28% 92.21%
Distance +
Histogram
0.1 0 65.26% 93.01%
0.3 0 64.99% 92.77%
0.5 0 64.90% 92.40%
1 0 53.83% 85.41%
Distance +
Re-ID
0 0.1 65.30% 92.92%
0 0.3 64.74% 92.72%
0 0.5 64.91% 92.76%
0 1 53.75% 84.83%
Distance +
Histogram +
Re-ID
0.1 0.1 65.14% 92.83%
0.2 0.2 64.88% 92.97%
0.4 0.1 64.74% 92.38%
0.2 0.4 64.15% 90.71%
Table 2: MOTA from the proposed solution and other tech-
niques evaluated considering only 10% of the dataset. The
solutions of (Chavdarova et al., 2018) and (Vo et al., 2020)
work offline, while the rest work online.
Technique MOTA MOTP
(Ong et al., 2020) 69.7% 73.2%
(Chavdarova et al., 2018) 72.2% 60.3%
(You and Jiang, 2020) 74.6% 78.9%
(Vo et al., 2020)
75.8% -
Ours 77.1% 96.4%
4.3 Evaluations with Ground-truth
Data
We also evaluated our solution using the WILD-
TRACK ground-truth data as input to analyze the al-
gorithm behavior when receiving perfect detections.
Table 3 shows this evaluation’s MOTA and MOTP
using only distance and different configurations of
graph weights, with the best values in bold.
Generalizable Online 3D Pedestrian Tracking with Multiple Cameras
825
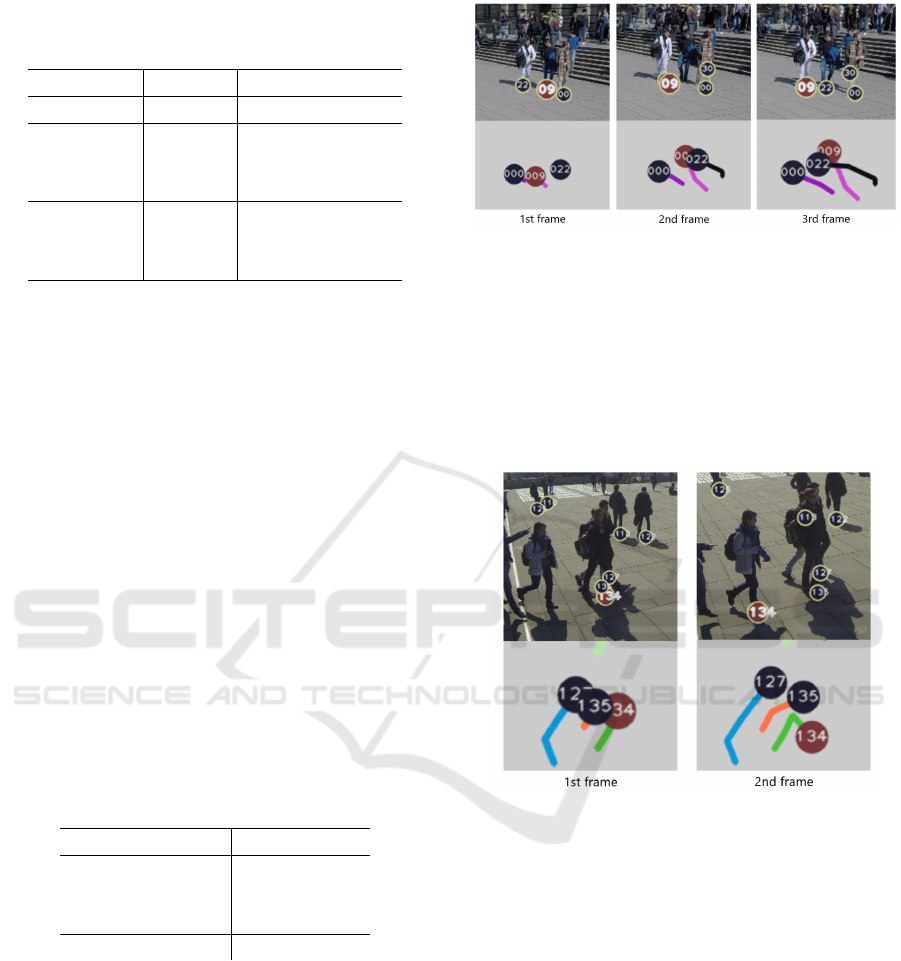
Table 3: MOTA and MOTP for different weight configu-
rations in graph edges, using ground-truth detections from
WILDTRACK dataset as input for tracking.
Weight Type λ
h
λ
id
MOTA MOTP
Distance 0 0 98.39% 98.69%
Distance+
Histogram
0.2 0 98.34% 98.59%
0.5 0 98.87% 98.73%
1 0 97.96% 97.14%
Distance +
Re-ID
0 0.2 98.41% 98.45%
0 0.5 98.61% 98.65%
0 1 98.28% 98.20%
With these results, it is possible to observe that,
given a perfect detection, tracking has excellent ac-
curacy and precision. Thus, the tracking algorithm is
considerably dependent on the quality of detections.
It is also noticeable that with the re-ID, the MOTA
can increase, and when we use histograms, there is an
improvement in both MOTA and MOTP metrics.
4.4 Execution Time Analysis
We analyzed the execution time of tracking without
considering the time to detect the pedestrians. For
each set of input detections, tracking takes approx-
imately 49.8 milliseconds, with the code written in
Python and executing in an Intel Core i7-7700HQ
CPU. Thus, this type of tracking can execute in real-
time, especially if rewritten in a faster programming
language like C++. Table 4 discloses the execution
average time of each tracking step and the total for
each input in milliseconds.
Table 4: Time of total execution and each step of tracking
per input in milliseconds.
Execution Time
Matching 47.6
Prediction (Kalman) 0.8
Update (Kalman) 1.4
Total 49.8
4.5 Failure Cases
Given these results, we conducted a qualitative anal-
ysis of failure cases. For example, Figure 8 illustrates
a failure case where the detection of a pedestrian that
has ID 09 in frame #2 had a precision error, which
occasioned a swap of identity between two persons in
the third frame. This error was caused by the predic-
tion step, even though both of them were walking in
parallel.
Figure 8: Failure case where a mismatch occurs.
On the other hand, Figure 9 exemplifies a failure
case where a person of the group goes undetected. At
the same time, a new person, without identification,
appears close to this group. This error made one of
the detections of the group pair with this new person
during graph matching, changing the ID of a pedes-
trian in this group to be the ID of the new person in
the scene.
Figure 9: Failure case where the identity of a person is
transferred to another.
Nevertheless, only a few trajectory errors hap-
pened when using ground-truth data of the WILD-
TRACK dataset as input.
5 CONCLUSIONS
This paper presented an algorithm for tracking pedes-
trians using multiple cameras. Our evaluation showed
that it outperforms state-of-the-art methods. How-
ever, Tables 1 and 3 suggest that the accuracy of the
solution for tracking proposed in this paper is mainly
dependent on the quality of detection. Also, failure
cases occasioned by detection errors were analyzed.
Furthermore, we also discussed the use of dis-
tances between color histograms and re-IDs to im-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
826

prove detection matching. We found that with the in-
clusion of these appearance features, both MOTA and
MOTP are slightly increased.
In future work, we intend to track 2D skeletons of
pedestrians in each camera (Xiu et al., 2018) instead
of tracking only ground plane points to use this infor-
mation to improve 3D pedestrian tracking.
ACKNOWLEDGEMENTS
The authors would like to thank Conselho Nacional
de Desenvolvimento Cient
´
ıfico e Tecnol
´
ogico (CNPq)
(process 425401/2018-9) for partially funding this re-
search.
REFERENCES
Bernardin, K. and Stiefelhagen, R. (2008). Evaluating mul-
tiple object tracking performance: the clear mot met-
rics. EURASIP Journal on Image and Video Process-
ing, 2008:1–10.
Bewley, A., Ge, Z., Ott, L., Ramos, F., and Upcroft, B.
(2016). Simple online and realtime tracking. In 2016
IEEE international conference on image processing
(ICIP), pages 3464–3468. IEEE.
Chavdarova, T., Baqu
´
e, P., Bouquet, S., Maksai, A., Jose,
C., Bagautdinov, T., Lettry, L., Fua, P., Van Gool, L.,
and Fleuret, F. (2018). Wildtrack: A multi-camera
hd dataset for dense unscripted pedestrian detection.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 5030–5039.
Chen, Y., Zhao, Q., An, Z., Lv, P., and Zhao, L. (2016).
Distributed multi-target tracking based on the k-mtscf
algorithm in camera networks. IEEE Sensors Journal,
16(13):5481–5490.
Galil, Z. (1986). Efficient algorithms for finding maxi-
mum matching in graphs. ACM Computing Surveys
(CSUR), 18(1):23–38.
Heindl, C. (2017). py-motmetrics. https://github.com/
cheind/py-motmetrics.
Hellinger, E. (1909). Neue begr
¨
undung der theo-
rie quadratischer formen von unendlichvielen
ver
¨
anderlichen. Journal f
¨
ur die reine und angewandte
Mathematik, 1909(136):210–271.
Kalman, R. E. (1960). A new approach to linear filtering
and prediction problems.
Leal-Taix
´
e, L., Milan, A., Reid, I., Roth, S., and Schindler,
K. (2015). Motchallenge 2015: Towards a bench-
mark for multi-target tracking. arXiv preprint
arXiv:1504.01942.
Lima, J. P., Roberto, R., Figueiredo, L., Simoes, F., and
Teichrieb, V. (2021). Generalizable multi-camera 3d
pedestrian detection. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 1232–1240.
Ong, J., Vo, B. T., Vo, B. N., Kim, D. Y., and Nord-
holm, S. (2020). A bayesian filter for multi-view 3d
multi-object tracking with occlusion handling. arXiv
preprint arXiv:2001.04118.
Papakis, I., Sarkar, A., and Karpatne, A. (2020). Gc-
nnmatch: Graph convolutional neural networks for
multi-object tracking via sinkhorn normalization.
arXiv preprint arXiv:2010.00067.
Song, J., Yang, Y., Song, Y.-Z., Xiang, T., and Hospedales,
T. M. (2019). Generalizable person re-identification
by domain-invariant mapping network. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition, pages 719–728.
Sun, H., Chen, Y., Aved, A., and Blasch, E. (2020a).
Collaborative multi-object tracking as an edge ser-
vice using transfer learning. In 2020 IEEE 22nd In-
ternational Conference on High Performance Com-
puting and Communications; IEEE 18th Interna-
tional Conference on Smart City; IEEE 6th Inter-
national Conference on Data Science and Systems
(HPCC/SmartCity/DSS), pages 1112–1119. IEEE.
Sun, Z., Chen, J., Chao, L., Ruan, W., and Mukherjee,
M. (2020b). A survey of multiple pedestrian track-
ing based on tracking-by-detection framework. IEEE
Transactions on Circuits and Systems for Video Tech-
nology, 31(5):1819–1833.
Vo, B.-N., Vo, B.-T., and Hoang, H. G. (2016). An effi-
cient implementation of the generalized labeled multi-
bernoulli filter. IEEE Transactions on Signal Process-
ing, 65(8):1975–1987.
Vo, M. P., Yumer, E., Sunkavalli, K., Hadap, S., Sheikh,
Y. A., and Narasimhan, S. G. (2020). Self-supervised
multi-view person association and its applications.
IEEE transactions on pattern analysis and machine
intelligence.
Wojke, N., Bewley, A., and Paulus, D. (2017). Simple on-
line and realtime tracking with a deep association met-
ric. In 2017 IEEE international conference on image
processing (ICIP), pages 3645–3649. IEEE.
Xiu, Y., Li, J., Wang, H., Fang, Y., and Lu, C. (2018). Pose
flow: Efficient online pose tracking. In BMVC.
Ye, M., Shen, J., Lin, G., Xiang, T., Shao, L., and Hoi, S. C.
(2021). Deep learning for person re-identification: A
survey and outlook. IEEE Transactions on Pattern
Analysis and Machine Intelligence.
You, Q. and Jiang, H. (2020). Real-time 3d deep multi-
camera tracking. arXiv preprint arXiv:2003.11753.
Zhou, X., Koltun, V., and Kr
¨
ahenb
¨
uhl, P. (2020). Tracking
objects as points. In European Conference on Com-
puter Vision, pages 474–490. Springer.
Zhu, C. (2019). Multi-camera people detection and track-
ing.
Generalizable Online 3D Pedestrian Tracking with Multiple Cameras
827
