
Streamlining Action Recognition in Autonomous Shared Vehicles
with an Audiovisual Cascade Strategy
Jo
˜
ao Ribeiro Pinto
1,2
, Pedro Carvalho
1,3
, Carolina Pinto
4
, Afonso Sousa
1,2
,
Leonardo Capozzi
1,2
and Jaime S. Cardoso
1,2
1
Centre for Telecommunications and Multimedia, INESC TEC, Porto, Portugal
2
Faculty of Engineering (FEUP), University of Porto, Porto, Portugal
3
School of Engineering (ISEP), Polytechnic of Porto, Porto, Portugal
4
Bosch Car Multimedia, Braga, Portugal
carolina.pinto@pt.bosch.com
Keywords:
Action Recognition, Audio, Cascading, Convolutional Networks, Recurrent Networks, Video.
Abstract:
With the advent of self-driving cars, and big companies such as Waymo or Bosch pushing forward into fully
driverless transportation services, the in-vehicle behaviour of passengers must be monitored to ensure safety
and comfort. The use of audio-visual information is attractive by its spatio-temporal richness as well as
non-invasive nature, but faces the likely constraints posed by available hardware and energy consumption.
Hence new strategies are required to improve the usage of these scarce resources. We propose the processing
of audio and visual data in a cascade pipeline for in-vehicle action recognition. The data is processed by
modality-specific sub-modules, with subsequent ones being used when a confident classification is not reached.
Experiments show an interesting accuracy-acceleration trade-off when compared with a parallel pipeline with
late fusion, presenting potential for industrial applications on embedded devices.
1 INTRODUCTION
Human action or activity recognition is a vibrant and
challenging research topic. Being able to recog-
nise actions automatically is game-changing and of-
ten crucial for several industries, including the sce-
nario of shared autonomous vehicles. Without a
driver responsible for the vehicle’s and occupant’s se-
curity and integrity, it falls upon automatic recogni-
tion systems to monitor passenger well-being and ac-
tions, and eventually recognise harmful behaviours or
even violence (Augusto et al., 2020). However, the
wide range of possible actions that can be portrayed,
the variability in the way different individuals portray
the same actions, the heterogeneity of sensors and the
type of information captured and the influence of ex-
ternal factors still pose significant hurdles to this task.
Despite all the above-mentioned challenges, the
topic of action recognition has thrived by following
a very recognisable recipe for success. As in plenty
of other pattern recognition tasks, the state-of-the-
art gradually evolved towards larger and more so-
phisticated models based on deep learning method-
ologies (Carreira and Zisserman, 2017; Feichtenhofer
et al., 2019; Qi et al., 2020). These have achieved in-
creasingly higher accuracy thanks to a growing num-
ber of massive databases typically using public video
data gathered through online sourcing, such as Kinet-
ics (Carreira and Zisserman, 2017), Multi-Moments
in Time (MMIT) (Monfort et al., 2019), or Activi-
tyNet (Heilbron et al., 2015). This also means most
research in action recognition is based on visual in-
formation (images or video). This is the case of the
I3D (Carreira and Zisserman, 2017), the methodology
currently deemed the state-of-the-art in this topic. In
fact, I3D goes further beyond simple visual spatial in-
formation by adopting a two-stream approach, includ-
ing optical flow for temporal action encoding. Other
approaches have explored recurrent networks for the
same purpose (Kong et al., 2017; Pang et al., 2019;
Hu et al., 2018), but have seldom managed to reach
the accuracy level offered by the I3D method.
Despite the meaningful strides brought by such
sophisticated methods and large databases, some limi-
tations can be observed. On the one hand, the general
nature of the data sourced to train and evaluate the
Pinto, J., Carvalho, P., Pinto, C., Sousa, A., Capozzi, L. and Cardoso, J.
Streamlining Action Recognition in Autonomous Shared Vehicles with an Audiovisual Cascade Strategy.
DOI: 10.5220/0010838900003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
467-474
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
467
state-of-the-art models lead to overly general results
that may not be verified in more specific scenarios,
such as in-vehicle passenger monitoring. On the other
hand, hefty models based on visual information and
optical flow (such as I3D) may offer very high accu-
racy, but their complexity does not allow for real-time
applications in inexpensive limited hardware, such as
embedded devices.
This paper proposes a set of changes to the state-
of-the-art I3D method to bring it closer to real ap-
plicability in edge computing scenarios: in this case,
we focus on action recognition and violence detec-
tion in shared autonomous vehicles. First, inspired
by (Pinto et al., 2020), the current work discards the
time-consuming optical flow component of I3D and
introduces a lightweight model for action recognition
with audio. Despite being less frequently used than
video, audio is considered one of the most promis-
ing options for a multimodal system for action recog-
nition (Kazakos et al., 2019; Cosbey et al., 2019;
Liang and Thomaz, 2019). This way, we obtain a
simpler methodology that can use both video and au-
dio modalities for a greater variety of information.
Then, as each modality is likely to contribute differ-
ently to the recognition of each action, we propose a
cascade strategy based on confidence score threshold-
ing. This strategy allows a simplification of the multi-
modal pipeline by using only one (primary) modality
as often as possible; the two modalities are used to-
gether only when the primary one is not enough for
sufficiently confident predictions. Hence, it is pos-
sible to attain significant time and computing energy
savings without overlooking classification accuracy.
This paper is organised as follows: beyond this in-
troduction, a description of the proposed multimodal
methodology and cascade strategy is presented in sec-
tion 2; the experimental setup is detailed in section 3;
section 4 presents and discusses the obtained results;
and the conclusions drawn from this work are pre-
sented in section 5.
2 PROPOSED METHODOLOGY
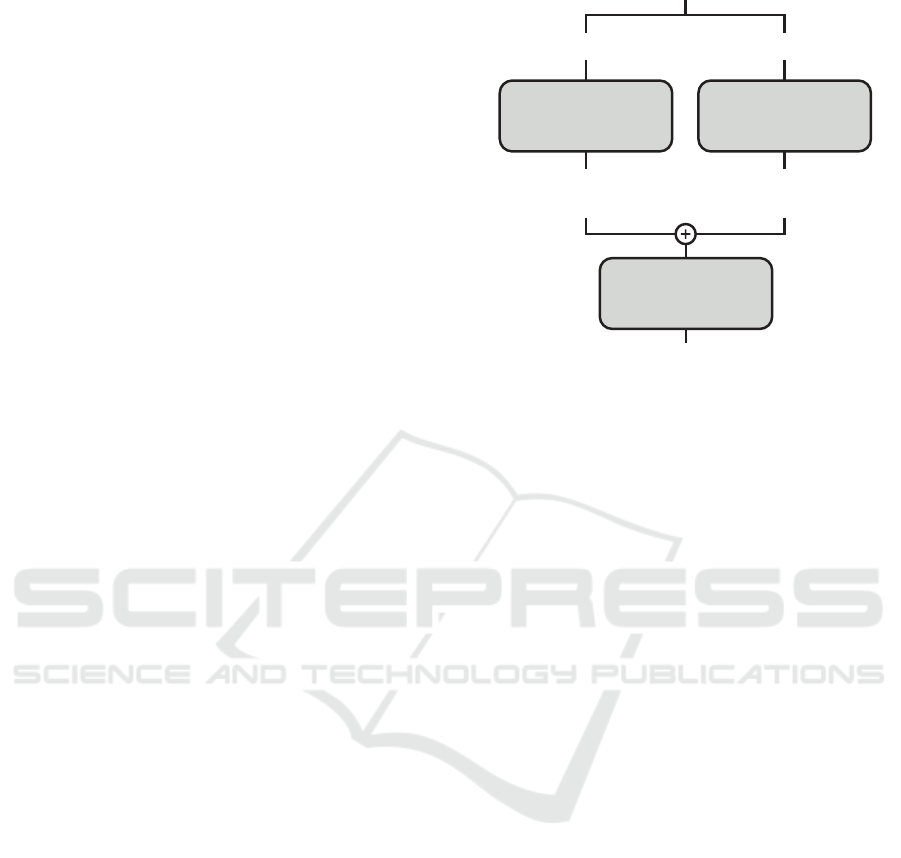
2.1 Multimodal Pipeline
The baseline consists of a multimodal pipeline for
activity recognition based on an audio-visual mod-
ule previously proposed for group emotion recogni-
tion (Pinto et al., 2020). The pipeline is composed
of three sub-modules (as illustrated in Fig. 1): the vi-
sual sub-module, which processes visual data; the au-
dio sub-module, which processes sound data; and the
fusion sub-module, which combines individual deci-
VISUAL
SUB-MODULE
AUDIO
SUB-MODULE
Frames Sound
Video
y
visual
y
audio
^ ^
FUSION
SUB-MODULE
y
joint
^
Figure 1: Diagram of the full multimodal pipeline for activ-
ity recognition.
sions from the previous two sub-modules into joint
multimodal classifications. The specific structures of
each of these sub-modules are described below.
2.1.1 Visual Sub-module
As in (Pinto et al., 2020), the visual sub-module is
based on an inflated ResNet50 (He et al., 2016) using
pretrained weights for the Multi-Moments in Time
(MMIT) activity recognition database (Monfort et al.,
2019). Using an inflated ResNet50 ensures optimal
performance by following the successful example of
the state-of-the-art I3D method (Carreira and Zisser-
man, 2017). Using model weights pretrained on the
large MMIT database allows us to transfer deeper and
more general knowledge to our narrower task of ac-
tivity recognition inside vehicles.
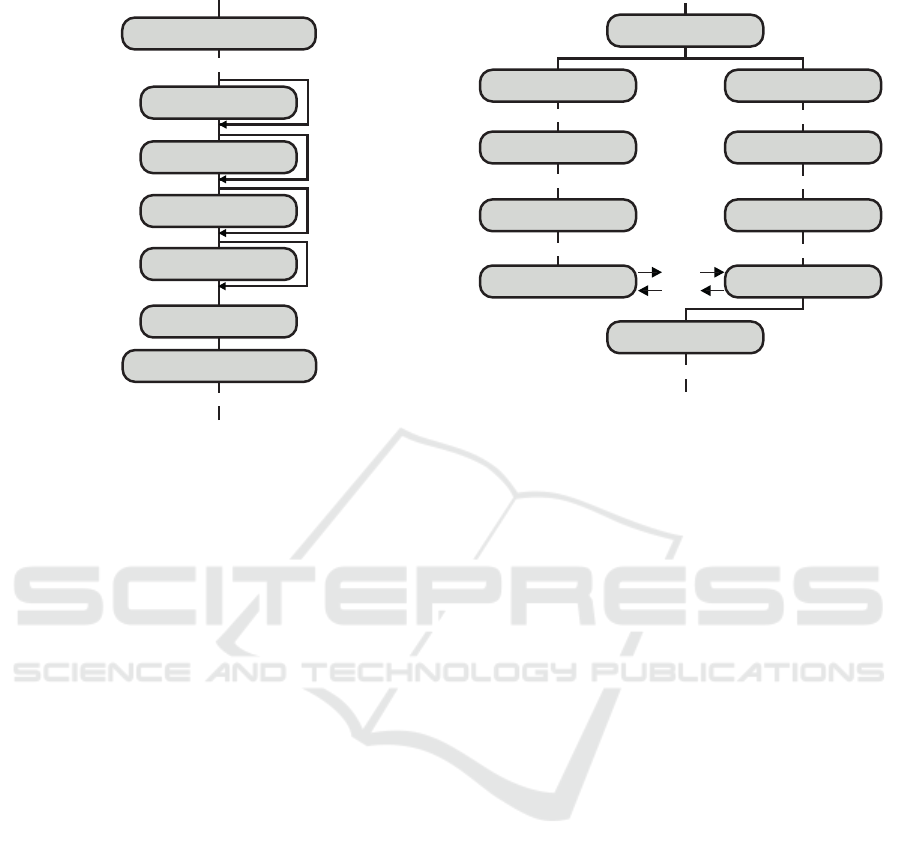
The inflated ResNet50 model (see Fig. 2) is com-
posed of seventeen residual blocks, each including
three 3D convolutional layers with 64 to 2048 filters,
batch normalisation and ReLU activation. Downsam-
pling at each block allows the model to capture impor-
tant information at different levels of resolution. Af-
ter an average pooling layer, the last fully-connected
layer, followed by a softmax activation function, of-
fers probability scores for each of the N considered
activity labels.
2.1.2 Audio Sub-module
The audio sub-module consists of a simple network
based on a bi-directional long short-term memory
(LSTM) model. These are known for their ability
to encode temporal information, important for audio-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
468
Frames
Residual Block A
y
visual
^
Batch Norm + ReLU
3x
Residual Block B
4x
Residual Block C
6x
Residual Block D
4x
Average Pooling
Softmax
Fully-Connected (N)
Conv3D (64@7x7x7)
Figure 2: Diagram of the visual sub-module (more de-
tails on the ResNet50 and the residual blocks in (He et al.,
2016)).
related topics, and have been previously successful
for tasks such as group emotion valence recogni-
tion (Pinto et al., 2020) or speech-based sentiment
analysis (Mirsamadi et al., 2017).
Unlike the visual sub-module, which largely fol-
lows the method proposed in (Pinto et al., 2020) to
approach the state-of-the-art performance of I3D, the
audio sub-module was reformulated. In the aforemen-
tioned work, the audio Bi-LSTM model received a
set of cepstral, frequency, and energy handcrafted fea-
tures extracted from each signal window. Moreover,
it included multiple convolutional layers with 512 fil-
ters each and an attention mechanism after the LSTM
layer. In this work, we design a streamlined and faster
audio sub-module.
The simplified and lighter Bi-LSTM model (see
Fig. 3), with less trainable parameters, receives a raw
audio signal divided into 100 ms windows with 50
ms overlap, without any preceding process of feature
extraction. Each window is processed by three con-
volutional layers (with 16, 32, and 64 1 × 5 filters,
respectively, stride 1, and padding 2), each followed
by ReLU activation and max-pooling (with pooling
size 5). A Bi-LSTM layer receives features from the
convolutional part for each window, and its output for
the last window is sent to a fully-connected layer for
classification (with N neurons, one for each activity
class, followed by softmax activation). In section 4,
we analyse the advantages of using the proposed au-
Audio
Sliding window
Conv1D (16@1x5)
Conv1D (32@1x5)
Conv1D (64@1x5)
Bi-LSTM Layer
Conv1D (16@1x5)
Conv1D (32@1x5)
Conv1D (64@1x5)
Bi-LSTM Layer
Fully-Conn. (N)
y
audio
^
...
...
...
...
ReLU, MaxPool (1x5)
ReLU, MaxPool (1x5)
ReLU, MaxPool (1x5)
ReLU, MaxPool (1x5)
ReLU, MaxPool (1x5)
ReLU, MaxPool (1x5)
Softmax
Figure 3: Diagram of the audio sub-module.
dio sub-module vs. the one in (Pinto et al., 2020).
2.1.3 Fusion Sub-module
The aforedescribed visual and audio sub-modules
output their respective sets of class probability pre-
dictions for a given video. To combine the two sep-
arate sets of predictions for each task into a sin-
gle audio-visual multimodal classification, the fusion
sub-module is used.
The fusion sub-module is composed of a simple
support vector machine (SVM) classifier. This clas-
sifier receives the probability score sets from the two
previous sub-modules concatenated as a single unidi-
mensional feature vector. The SVM model is trained
to use these probability sets to output a joint class pre-
diction for the respective video.
2.2 Cascade Strategy
On the multimodal pipeline described above, all sub-
modules are used for each instance (video) that needs
to be classified. This means that regardless of the dif-
ficulty of a given video or the activity portrayed, both
visual and sound data are always processed, resulting
in two sets of unimodal class predictions which are
then combined into a set of multimodal class proba-
bilities.
Given the considerable complexity of both the
residual-network-based visual sub-module and the
BiLSTM-based audio sub-module, this multimodal
pipeline is arguably too heavy for the target applica-
Streamlining Action Recognition in Autonomous Shared Vehicles with an Audiovisual Cascade Strategy
469
tion. This is especially true considering, as observed
in (Pinto et al., 2020), that different classes may bene-
fit much more from one of the modalities and thus not
need the other one. Hence, we design a cascade strat-
egy to explore the possibility of using just one of the
modalities and “turning off” the remaining two sub-
modules as often as possible. This aimed to achieve
improved processing times and energy usage, offering
an alternative or complement to model compression
strategies.
On the proposed cascade strategy, one of the data
modalities (visual or audio) is selected as the “pri-
mary” modality and, as such, the corresponding sub-
module is always used to offer a starting prediction.
The probability score offered for the predicted class
is considered a “confidence score”: a measure of how
confident the primary sub-module is in the prediction
it provided. If the confidence score is above a specific
confidence threshold T ∈ [0, 1], the remaining mod-
ules remain unused, and the primary sub-module pre-
dictions are considered final. However, if the afore-
mentioned condition is not verified, the secondary
sub-module is called to offer additional information
for more confident predictions, which are then com-
bined into a single multimodal prediction (just like the
original multimodal pipeline).
The performance benefits of such a strategy are in-
timately related to the defined confidence threshold.
If T is too high, most of the instances will use both
data sources, thus retaining the accuracy offered by
the parallel pipeline but reaping very few benefits re-
lated to complexity or processing time. Conversely,
if T is too low, most instances will be classified us-
ing only the primary sub-module, which may result
in heavily impacted accuracy, despite the complexity
benefits of the simplified pipeline. Section 4 includes
thorough experimental results on the impact of the
confidence score in the accuracy and processing re-
quirements of the pipeline for activity classification.
3 EXPERIMENTAL SETUP
3.1 Databases
For generic scenarios, this work used the Multi-
Moments in Time (MMIT) database (Monfort et al.,
2019), made available by the creators upon request.
The MMIT database includes a total of 1 035 862
videos, split between a training set (1 025 862 videos)
and a validation set (10 000 videos). These cor-
respond to a total of 339 classes, describing the
main activity verified in each video. From those
classes, only those related to the target scenario of
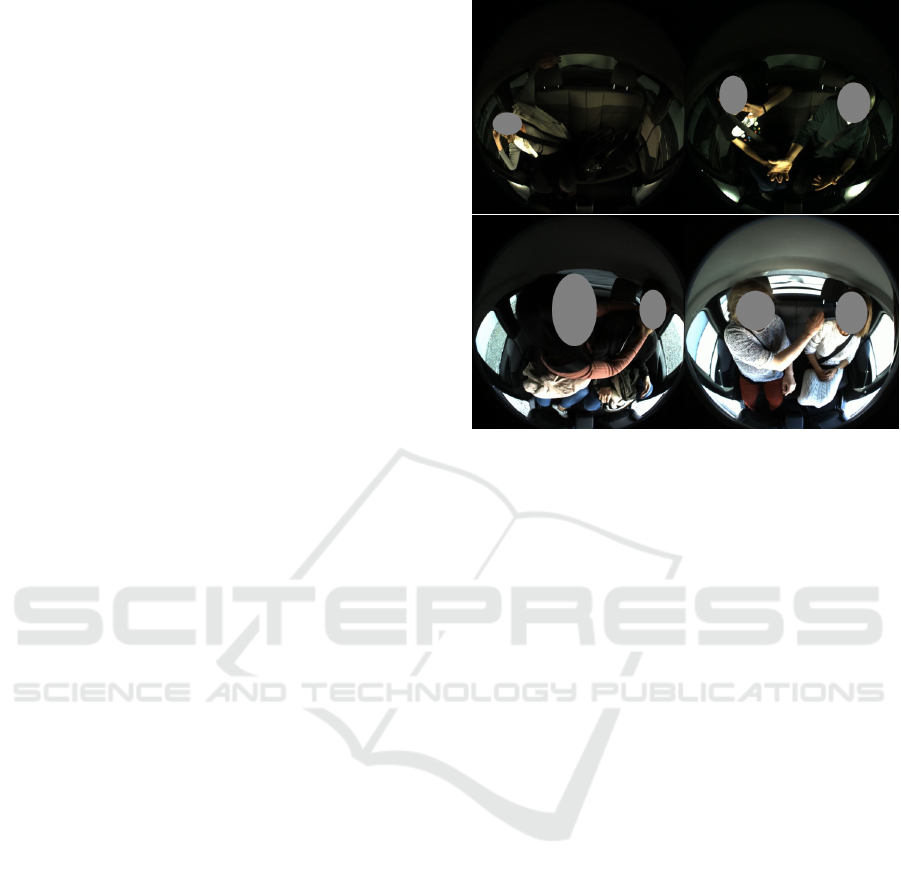
Figure 4: Example frames from the in-vehicle dataset, de-
picting normal activities (top row) and violence between
passengers (bottom row). Grey areas were used to protect
the subjects’ identities.
in-vehicle passenger monitoring were included. This
resulted in a subset of twenty-one classes: fight-
ing/attacking, punching, pushing, sitting, sleeping,
coughing, singing, speaking, discussing, pulling,
slapping, hugging, kissing, reading, telephoning,
studying, socializing, resting, celebrating, laughing,
and eating. Train and test divisions use the official
predefined MMIT dataset splits.
For the in-vehicle scenario, a private dataset was
used. The dataset includes a total of 490 videos of
the back seat of a car occupied by one or two passen-
gers (see example frames in Fig. 4). Videos are ac-
quired using a fish-eye camera to capture most of the
interior of the car and microphones to acquire sound
data. Each video includes annotations for forty-two
action classes: entering, leaving, buckle on/off, turn-
ing head, lay down, sleeping, stretching, changing
seats, changing clothes, reading, use mobile phone,
making a call, posing, waving hand, drinking, eating,
singing, pick up item, come closer, handshaking, talk-
ing, dancing, finger-pointing, leaning forward, tick-
ling, hugging, kissing, elbowing, provocate, pushing,
protecting oneself, stealing, screaming, pulling ar-
guing, grabbing, touching (sexual harassment), slap-
ping, punching, strangling, fighting, and threatening
with weapon. Videos are randomly drawn into the
train dataset (70%) or the test dataset (30%).
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
470
3.2 Data Pre-processing
A total of 10 frames, evenly spaced, was extracted
from each video in the MMIT selected data subset
(each with about 5 sec). These frames were concate-
nated over a third dimension following their temporal
order to serve as input to the visual sub-module. Two
seconds of audio were extracted from each video and
normalised to 16 kHz sampling frequency to serve as
input to the audio sub-module.
For the in-vehicle dataset, each video can have
multiple labels (the passengers portray different ac-
tions over the course of each acquisition). As such,
each video period labelled as one of the 42 classes,
is divided into two-second long individual samples.
From each of these, 8 frames are extracted, resized
and cropped into 224×224 squares, and concatenated
over a third dimension to be used by the visual sub-
module, and the corresponding audio is resampled to
16 kHz to be used by the audio sub-module.
In the specific scenario of in-vehicle violence
recognition, the aforementioned forty-two classes of
the in-vehicle dataset have been clustered into three
classes: normal car usage (from ‘entering’ to ‘pick
up item’, in order of appearance), normal interactions
(from ‘come closer’ to ‘kissing’), and violence (from
‘elbowing’ to ‘threatening with weapon’).
3.3 Model Training
The inflated ResNet-50 model used on the visual
sub-module uses the official pretrained weights from
the MMIT database. Given that it was pretrained
on the same database used in the laboratory experi-
ments, this work took full advantage of this by set-
ting most of the parameters of the network as non-
trainable. The only parameters that were trained are
those of the fully-connected layers which correspond
to the classification on the selected twenty-one cat-
egories. This layer was optimised for a maximum
of 250 epochs according to categorical cross-entropy
loss, with batch size 32, using the Adam optimiser
with an initial learning rate of 10
−4
. For regularisa-
tion, dropout with a probability of 0.5 is used before
the fully-connected layer. For the in-vehicle scenario,
the training process is identical to the one described
above. However, since the nature of the in-vehicle
video data is substantially different from MMIT, the
pretrained weights are also trained (not frozen) along-
side the fully-connected layer for classification.
For both the generic and in-vehicle scenarios, the
audio sub-module was trained for a maximum of 200
epochs with batch size 64 and early-stopping patience
of 25 epochs. The optimisation was performed using
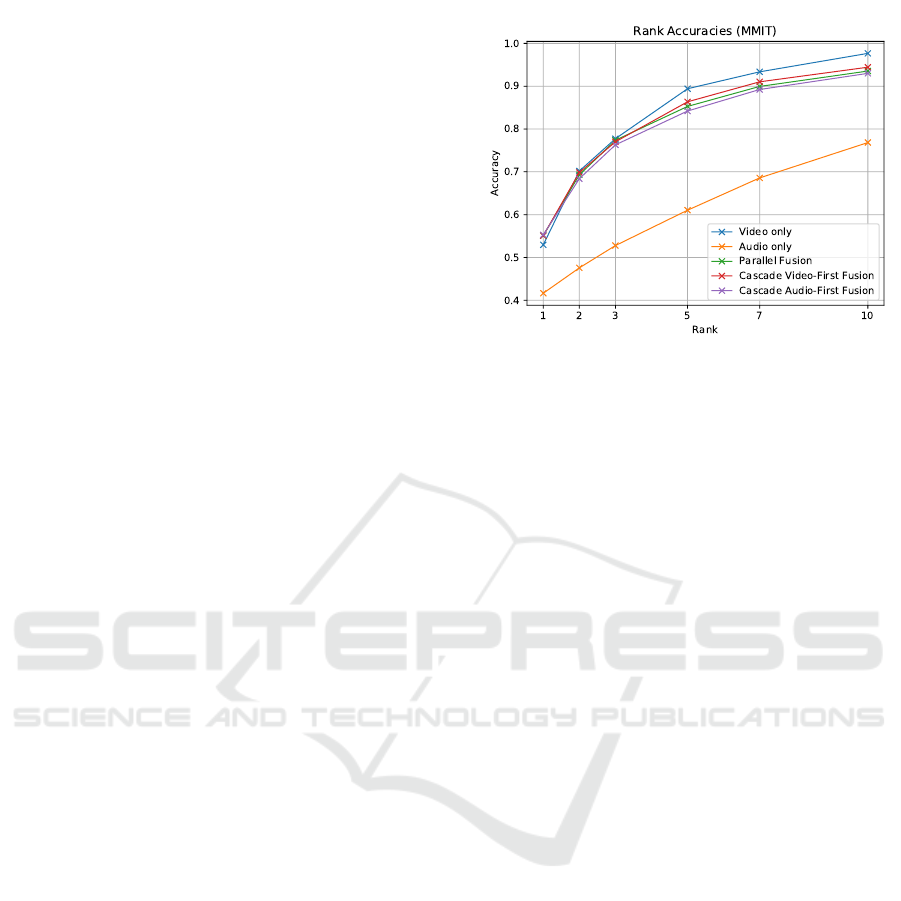
Figure 5: Rank accuracy results for the 21 selected classes
from the MMIT database.
Adam with an initial learning rate of 10
−4
and cross-
entropy loss.
4 RESULTS
After training the methodologies previously de-
scribed, including the proposed cascade strategy, an
overview of the obtained accuracy results is presented
in Table 1. It is clear the overall better performance
of the proposed cascade pipeline, particularly with the
audio sub-module as the first block. Subsections 4.1
and 4.2 offer a deeper discussion on the results for dif-
ferent configurations of the cascade pipeline for the
more generic scenarios and the specific case of in-
vehicle monitoring respectively.
4.1 Generic Scenarios
For the laboratory experiments using the selected data
from the MMIT database, the full parallel multimodal
pipeline explored in this paper offered 55.12% accu-
racy. However, when considering the proposed cas-
cade strategy based on confidence score thresholds, it
was possible to achieve an improved accuracy score
of 55.30% (see Fig. 5). Beyond this relatively small
accuracy improvement, the largest benefit of the pro-
posed cascade algorithm is related to processing time.
As presented in Fig. 6, the best accuracy of 55.30%
is achieved with an audio-first cascade with a confi-
dence score threshold T = 0.5. This means it is pos-
sible to avoid the visual and fusion sub-modules for
approximately 51% of all instances without perfor-
mance losses.
An analysis of size, number of parameters, and
average run time per instance for each sub-module
(see Table 2) shows that the visual model is the hefti-
Streamlining Action Recognition in Autonomous Shared Vehicles with an Audiovisual Cascade Strategy
471
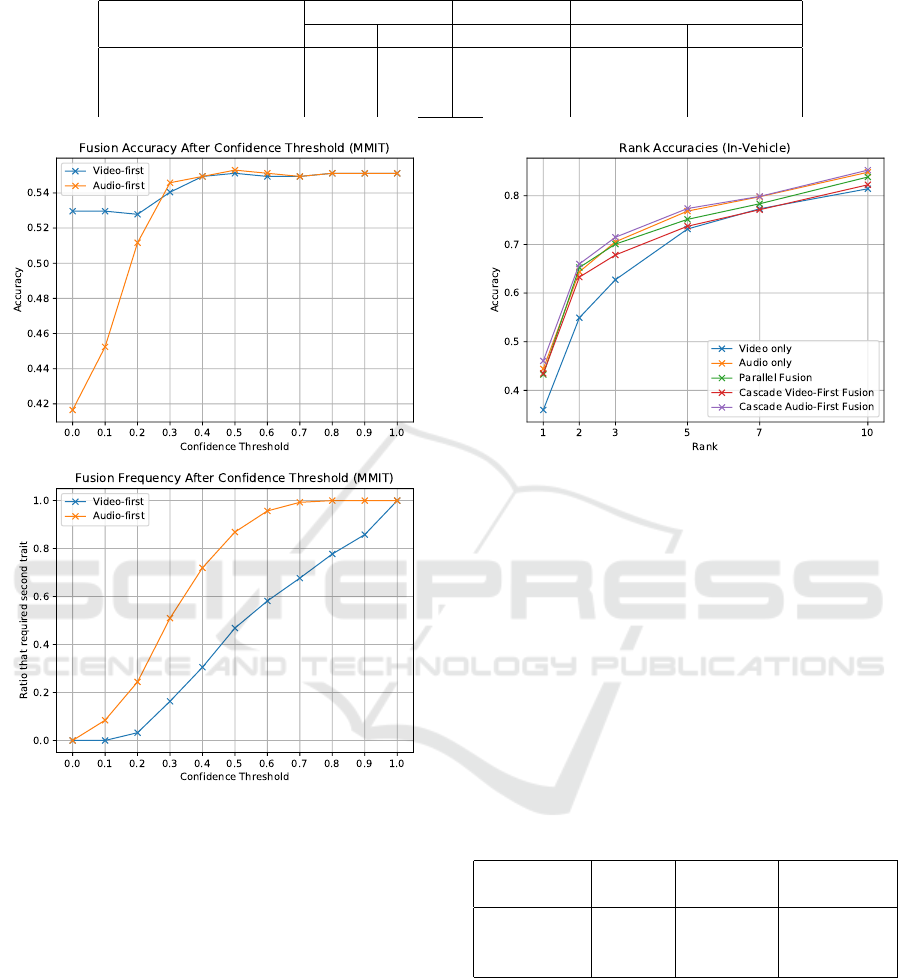
Table 1: Summary of the accuracy (%) results obtained in the various experimental scenarios.
Scenario
Unimodal Multimodal Cascade
Audio Visual Parallel Audio-First Video-First
Generic (21 classes) 41.65 52.96 55.12 55.30 55.12
In-Vehicle (42 classes) 44.42 35.96 43.26 46.05 43.47
In-Vehicle (3 classes) 64.10 61.87 66.61 68.88 66.77
Figure 6: Cascade results for the 21 selected classes from
the MMIT database: overall classification accuracy (top)
and fraction of instances that need the secondary modality
(bottom) for different confidence thresholds.
est among the three sub-modules. Hence, being able
to bypass it on more than half of the instances trans-
lates into significant time savings: while the full mul-
timodal pipeline takes, on average, 85.9 ms to predict
an instance’s activity label, the proposed cascade can
do it in only 46.3 ms, on average, without accuracy
losses. This brings us closer to real applications us-
ing inexpensive hardware in the target in-vehicle sce-
nario.
As visible in Table 2, the proposed audio sub-
module has a total size of 1.70 MB, approximately
230 thousand parameters, and an average GPU run
time of 8.30 ms per instance. Conversely, the au-
dio sub-module used in (Pinto et al., 2020), on this
Figure 7: Rank accuracy results for the in-vehicle scenario
with 42 classes.
task of activity recognition, has a total size of 3.94
MB, approximately 1.026 million parameters, and an
average GPU run time of 1666 ms per instance (due
to the CPU-based handcrafted feature extraction pro-
cess). Despite the significant reduction in run time,
size, and complexity, the proposed audio sub-module
performed similarly vs. the alternative (41.65% and
42.01% accuracy, respectively).
Table 2: Summary of the size, total number of parameters,
and average run times per instance of the three pipeline
sub-modules for the in-lab scenario (run times were com-
puted using a NVidia GeForce GTX 1080 GPU, with the
exception of the fusion sub-module, computed on an Intel
i7-8565U CPU).
Sub-module
Size
(MB)
Params.
Run Time
(ms)
Visual 176 46.2 M 77.18
Audio 1.70 220 K 8.30
Fusion 1.94 - 0.38
4.2 In-vehicle Scenario
The results on the data from the target in-vehicle sce-
nario largely follow those discussed above for the lab-
oratory experiments. On the 42 class activity recog-
nition task, an audio-first cascade strategy achieved
the best performance (46.05% accuracy) versus the
full multimodal pipeline (43.26%) and the best uni-
modal sub-module (44.42%). Similar accuracy im-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
472
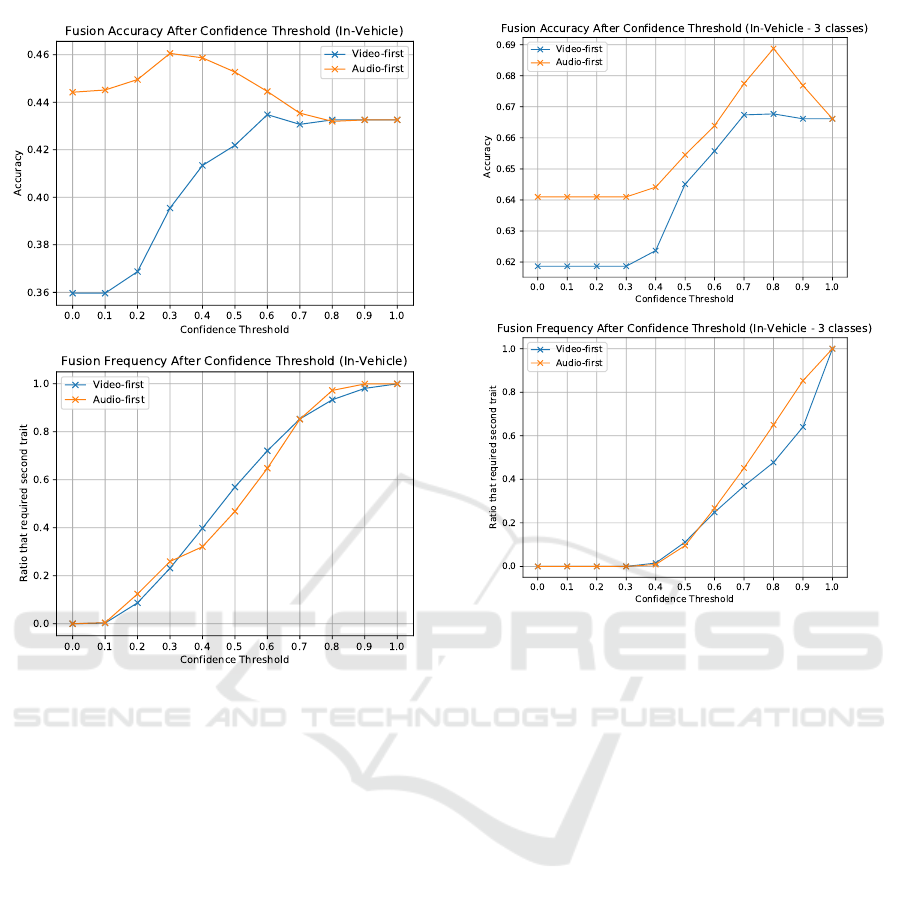
Figure 8: Cascade results in the in-vehicle scenario with
42 classes: overall classification accuracy (top) and fraction
of instances that need the secondary modality (bottom) for
different confidence thresholds.
provements are verified up to rank 10 (see Fig. 7).
With a confidence score threshold of T = 0.3, this cas-
cade strategy is able to avoid the visual sub-module
for approximately 74.1% of the instances (see Fig. 8).
Considering the average run times presented in the
previous subsection, this means the cascade is able
to offer activity predictions in 28.4 ms, on average,
while offering considerably higher accuracy than the
full multimodal pipeline (which would take 85.9 ms).
For the three-class violence recognition task, the
results follow the same trend, albeit with higher ac-
curacy scores for all sub-modules and fusion strate-
gies. The proposed cascade strategy with audio as
primary modality was able to attain 68.88% accuracy,
considerably better than the 66.61% offered by the
full multimodal pipeline. This accuracy corresponds
to T = 0.8, which enabled avoiding the visual sub-
module for 35% of all instances (see Fig. 9). While
this value is lower than those reported for the previ-
ous experiments, it still translates into average time
savings of 27.2 ms per instance (58.7 ms for the cas-
Figure 9: Cascade results in the in-vehicle scenario with
3 classes: overall classification accuracy (top) and fraction
of instances that need the secondary modality (bottom) for
different confidence thresholds.
cade vs. 85.9 ms for the full pipeline), accompanied
by a considerable improvement in accuracy.
5 CONCLUSIONS
This paper explored a different strategy for the recog-
nition of human activities, focusing on the scenario of
autonomous shared vehicles. In addition to the inher-
ent difficulties of automatically recognising human
actions using audio-visual data, this specific scenario
poses specific constraints regarding available hard-
ware and energy consumption.
Inspired by state-of-the-art multimodal ap-
proaches, the main contributions are two-fold: a
lighter-weight deep-learning base audio processing
module; and a cascade processing pipeline. The
proposed audio processing module demonstrated
state-of-the-art performance while presenting lesser
memory requirements and computational demands.
With the sub-modules implemented, different con-
figurations were tested for the cascade strategy to
assess which one provides the best performance,
taking into account two critical axes: accuracy and
Streamlining Action Recognition in Autonomous Shared Vehicles with an Audiovisual Cascade Strategy
473

computational performance. Results show that by
using audio as the first processing block, it was
possible to obtain an accuracy score higher than the
state-of-the-art, along with a significant reduction in
processing/inference time.
The obtained results are interesting and reveal a
high potential for further improvement. Modifica-
tions to the individual processing sub-modules could
contribute to even higher accuracies while further re-
ducing computational weight. The latter may benefit
from a combination with model compression and ac-
celeration techniques, such as quantisation, avoiding
likely losses in accuracy due to compression.
The proposed strategy demonstrated benefits from
cascading the processing modules. Other early mod-
ules may bring other benefits by filtering out incom-
ing audio-visual data, without relevant content (e. g.,
without people present or without movement/sound).
ACKNOWLEDGEMENTS
This work was supported by: European Struc-
tural and Investment Funds in the FEDER com-
ponent, through the Operational Competitiveness
and Internationalization Programme (COMPETE
2020) [Project no. 039334; Funding Reference:
POCI-01-0247-FEDER-039334], by National Funds
through the Portuguese funding agency, FCT -
Fundac¸
˜
ao para a Ci
ˆ
encia e a Tecnologia within
project UIDB/50014/2020, and within PhD grants
“SFRH/BD/137720/2018” and “2021.06945.BD”.
The authors wish to thank the authors of the MMIT
database and pretrained models.
REFERENCES
Augusto, P., Cardoso, J. S., and Fonseca, J. (2020). Au-
tomotive interior sensing - towards a synergetic ap-
proach between anomaly detection and action recog-
nition strategies. In Fourth IEEE International Con-
ference on Image Processing, Applications and Sys-
tems (IPAS 2020), pages 162–167, Genova, Italy.
Carreira, J. and Zisserman, A. (2017). Quo vadis, action
recognition? a new model and the kinetics dataset. In
2017 IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 4724–4733. IEEE.
Cosbey, R., Wusterbarth, A., and Hutchinson, B. (2019).
Deep Learning for Classroom Activity Detection from
Audio. In ICASSP 2019 - 2019 IEEE International
Conference on Acoustics, Speech and Signal Process-
ing (ICASSP), pages 3727–3731. IEEE.
Feichtenhofer, C., Fan, H., Malik, J., and He, K. (2019).
SlowFast Networks for Video Recognition. In 2019
IEEE/CVF International Conference on Computer Vi-
sion (ICCV), pages 6201–6210.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 770–778.
Heilbron, F. C., Escorcia, V., Ghanem, B., and Niebles, J. C.
(2015). ActivityNet: A large-scale video benchmark
for human activity understanding. In 2015 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 961–970.
Hu, J. F., Zheng, W. S., Ma, L., Wang, G., Lai, J., and
Zhang, J. (2018). Early action prediction by soft re-
gression. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 41(11):2568–2583.
Kazakos, E., Nagrani, A., Zisserman, A., and Damen,
D. (2019). EPIC-Fusion: Audio-Visual Temporal
Binding for Egocentric Action Recognition. In 2019
IEEE/CVF International Conference on Computer Vi-
sion (ICCV), pages 5491–5500.
Kong, Y., Tao, Z., and Fu, Y. (2017). Deep sequential con-
text networks for action prediction. In 2017 IEEE
Conference on Computer Vision and Pattern Recog-
nition (CVPR), pages 3662–3670.
Liang, D. and Thomaz, E. (2019). Audio-based activities of
daily living (ADL) recognition with large-scale acous-
tic embeddings from online videos. Proc. ACM Inter-
act. Mob. Wearable Ubiquitous Technol., 3(1).
Mirsamadi, S., Barsoum, E., and Zhang, C. (2017). Auto-
matic speech emotion recognition using recurrent neu-
ral networks with local attention. In 2017 IEEE Inter-
national Conference on Acoustics, Speech and Signal
Processing (ICASSP), pages 2227–2231. IEEE.
Monfort, M., Ramakrishnan, K., Andonian, A., McNamara,
B. A., Lascelles, A., Pan, B., Fan, Q., Gutfreund,
D., Feris, R., and Oliva, A. (2019). Multi-moments
in time: Learning and interpreting models for multi-
action video understanding.
Pang, G., Wang, X., Hu, J.-F., Zhang, Q., and Zheng, W.-
S. (2019). DBDNet: Learning Bi-directional Dynam-
ics for Early Action Prediction. In Proceedings of the
Twenty-Eighth International Joint Conference on Ar-
tificial Intelligence, IJCAI-19, pages 897–903.
Pinto, J. R., Gonc¸alves, T., Pinto, C., Sanhudo, L., Fon-
seca, J., Gonc¸alves, F., Carvalho, P., and Cardoso, J. S.
(2020). Audiovisual classification of group emotion
valence using activity recognition networks. In 2020
IEEE 4th International Conference on Image Process-
ing, Applications and Systems (IPAS), pages 114–119.
Qi, M., Wang, Y., Qin, J., Li, A., Luo, J., and Van Gool,
L. (2020). stagNet: An Attentive Semantic RNN for
Group Activity and Individual Action Recognition.
IEEE Transactions on Circuits and Systems for Video
Technology, 30(2):549–565.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
474
