
MOD SLAM: Mixed Method for a More Robust SLAM
without Loop Closing
Thomas Belos
1 a
, Pascal Monasse
1 b
and Eva Dokladalova
2 c
1
LIGM, Ecole des Ponts ParisTech, Universit
´
e Gustave Eiffel, CNRS, F-77454 Marne-la-Vall
´
ee, France
2
LIGM, Universit
´
e Gustave Eiffel, CNRS, ESIEE Paris, F-77454 Marne-la-Vall
´
ee, France
Keywords:
SLAM, Simultaneous Localizaton and Mapping, Odometry, Drift, Robust, Online, ORB, DSO, Photometric,
Features, Indirect, Direct, Mixed, Hybrid.
Abstract:
In recent years, the state-of-the-art of monocular SLAM has seen remarkable advances in reducing errors and
improving robustness. At the same time, this quality of results can be obtained in real-time on small CPUs.
However, most algorithms have a high failure rate out-of-the-box. Systematic error such as drift remains
still significant even for the best algorithms. This can be handled by a global measure as a loop closure, but
it penalizes online data processing. We propose a mixed SLAM, based on ORB-SLAM2 and DSO: MOD
SLAM. It is a fusion of photometric and feature-based methods, without being a simple copy of both. We
propose a decision system to predict at each frame which optimization will produce the minimum drift so
that only one will be selected to save computational time and resources. We propose a new implementation
of the map that is equipped with the ability to actively work with DSO and ORB points at the same time.
Our experimental results show that this method increases the overall robustness and reduces the drift without
compromising the computational resources. Contrary to the best state-of-the-art algorithms, MOD SLAM can
handle 100% of KITTI, TUM, and random phone videos, without any configuration change.
1 INTRODUCTION
Boosted by the automotive industry and robotics ap-
plications, visual monocular Simultaneous Localisa-
tion and Mapping (SLAM) algorithms have made re-
markable progress in terms of robustness, accuracy
and of computation cost reduction (Engel et al., 2017;
Ferrera et al., 2021; Forster et al., 2017). Today, the
state-of-the-art algorithms run on embedded CPUs
in real-time and are being used extensively in many
emerging applications such as navigation for drones
(von Stumberg et al., 2017), self-driving cars (Sin-
gandhupe and La, 2019), 3D modeling of urban en-
vironments, and more (Lothe et al., 2009).
Despite this progress, the robustness and gener-
ated drift issues have still not been resolved (Chahine
and Pradalier, 2018). Mainly due to the map, which
will always contain a certain amount of gauges free-
dom (Strasdat et al., 2010), as the measured pixels
2D positions are discrete numbers. This drift prop-
a
https://orcid.org/0000-0002-2172-5962
b
https://orcid.org/0000-0001-9167-7882
c
https://orcid.org/0000-0003-1765-7394
agates and worsens through the various optimization
processes, especially during the gradient descent, and
produces the loss of consistency of the results.
It is known that this drift significantly penalizes
direct methods based on photometric optimization
which are otherwise very efficient (Engel et al., 2017).
On the other hand, feature-based methods, which are
less affected by this phenomenon, can however have
a strong drift in poorly textured environments (Mur-
Artal and Tard
´
os, 2017).
In general, to solve this issue a global correction
such as loop closure is exploited (G
´
alvez-L
´
opez and
Tard
´
os, 2012). However, the loop closure burdens the
computing requirements of the online SLAM, and be-
comes impossible if a loop doesn’t exist in the trajec-
tory.
In this paper, we introduce a new mixed SLAM
method (Figure 1) that we call Mixed ORB-SLAM2
and DSO (a.k.a. MOD SLAM). The principle of
MOD SLAM consists in a mix of the currently most
popular state-of-the-art methods: feature-based ORB-
SLAM2 (Mur-Artal and Tard
´
os, 2017) and direct
method DSO (Gao et al., 2018). MOD SLAM relies
on a new decision system allowing to predict in ad-
Belos, T., Monasse, P. and Dokladalova, E.
MOD SLAM: Mixed Method for a More Robust SLAM without Loop Closing.
DOI: 10.5220/0010833600003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
691-701
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
691

Figure 1: Screenshot of MOD SLAM software during
an execution. The estimated trajectory is blue. The
groundtruth is green.
vance which optimization will produce minimal drift.
To ensure minimal required computing effort, MOD
SLAM uses an original map that has the ability to
actively work with ORB-SLAM2 and DSO informa-
tion at the same time, without running both methods
in parallel. We show on public datasets and on our
smartphone datasets that this method improves the ro-
bustness and reduces the drift without increasing the
computation resources.
The remaining part of this paper is organized as
follows. Sections 1.1 and 1.2 introduce the related
work and our contribution. Section 2 briefly describes
ORB-SLAM2 and DSO procesing pipelines and prin-
ciples. Section 3 presents the principles of the MOD
SLAM method. The experimental results are col-
lected and discussed in section 4. Finally, the last
section is dedicated to the outline of conclusions and
future work.
1.1 Related Work
Visual SLAM and odometry methods include both
camera pose estimation and 3D scene reconstruction
algorithms. We can distinguish four main classes.
Indirect SLAM. (also known as feature-based
SLAM) proceeds by extracting salient image fea-
ture sets and matching them by using feature specific
descriptors. The optimization of the camera poses
and the 3D points are done by minimizing the re-
projection error using the 2D-3D matches. A typical
example is Parallel Tracking and Mapping for Small
AR Workspaces (Klein and Murray, 2007) by Klein et
al. that has inspired numerous indirect SLAM meth-
ods. This is the case of ORB-SLAM2 (Mur-Artal
and Tard
´
os, 2017) (improved ORB-SLAM (Mur-
Artal et al., 2015)) by Mur-Artal et al. which is cur-
rently one of reference state of the art indirect method
equipped with a loop closure system and has relocal-
ization capabilities. The drawback is relatively high
computing time and the need for robust estimation
techniques. If ORB-SLAM2 is known to perform
well on KITTI odometry car dataset (Geiger et al.,
2012), it can fail to handle the videos of TUM Dataset
(Engel et al., 2016) with low texture information.
Direct SLAM. (also known as photometric
optimization-based SLAM) methods estimate motion
and structure by optimizing directly error measure
at pixel intensities level. Dense direct method like
DTAM (Newcombe et al., 2011) estimates dense
depth map and optimizes error by using all image
pixels. These kinds of methods generally need a big
amount of resources and a GPU. Whereas sparse
direct methods as (Gao et al., 2018) by Engel et al.
performs an optimization based on a subset of interest
points in the images. Contrary to ORB interest points,
DSO interest points do not need repeatability, but
they are required to be photometrically trackable.
This method track a huge number of points very
precisely, with very low CPU load, resulting in a
good quality point cloud. Despite these advantages,
direct methods suffer from drift problem in dynamic
and fast motion scenes. It needs perfect internal and
photometric calibration and good image quality.
Semi-Direct SLAM. is an in-between direct and in-
direct SLAM. We can cite SVO (Forster et al., 2014;
Forster et al., 2017) by Forster et al. as the state of the
art semi-direct method example. It photometrically
tracks and matches the features, but still minimizes
the re-projection error. Its alternative CNN-SVO by
Yan Loo et al. (Loo et al., 2019) aims to improve
monocular SLAM without closing loop, by sustain-
ing SVO with deep learning estimation. The authors
succeeded to reduce significantly the drift, but at the
price of GPU support. Notice that CNN-SVO is one
of the few articles which evaluate on monocular ORB-
SLAM2 without closing loop.
Mixed Methods. are based on tight coupling of di-
rect and feature-based methods. Hun Lee et al. (Lee
and Civera, 2018) proposed Loosely-Coupled Semi-
Direct Monocular SLAM which runs ORB-SLAM2
and DSO in parallel. The authors execute a standard
DSO, and forward the marginalized frame to a new
ORB SLAM with loop closure. The principal benefit
of their system is to have a photometric SLAM with
loop closure. However, without loop closure, they see
no improvement over regular ORB-SLAM2, proba-
bly because ORB-SLAM2 is always taking the lead
(Section 4.4).
The aim of this paper is to propose a new mixed
ORB-SLAM2 and DSO method, similar in general
principle to (Lee and Civera, 2018). The main
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
692
Get New
Frame
Pose
Estimation
Track Local Map
& Refine pose
Local B.A.
New Points
Creations
Points
culling
KeyFrames
Culling
Pose & Light
Estimation
Track
Immature Points
Local B.A.
Activate/Remove
Immature Points
Marginalisation
Need
KeyFrame
Immature Points
creation
a. ORB-SLAM2
b. DSO
Get New
Frame
Pose
Estimation
Decision
Mixed Pose
Estimation
Get New
Frame
Track Local Map
& Refine Pose
B.A. and
KeyFrame
Decision
New KeyFrame
& B.A.
Frame
XYZ ORB
Points
Inverse Depth
DSO Points
Frame
MIXED MAP
...
Need
KeyFrame
Global B.A.
c. Mixed Method
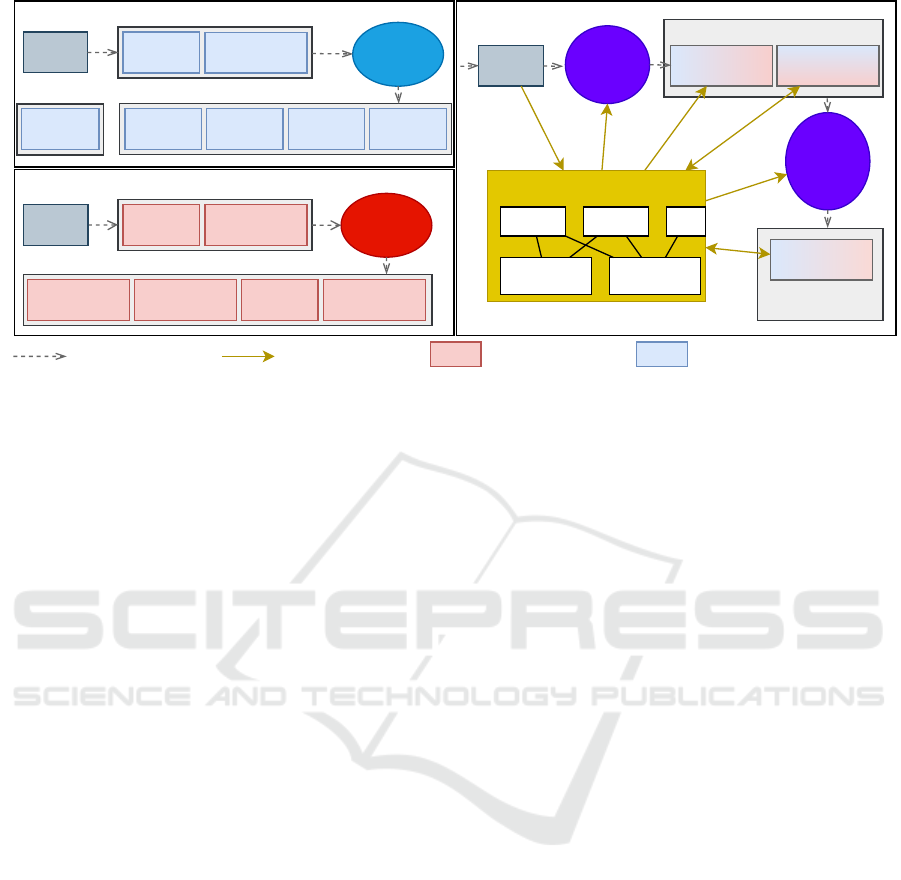
Temporal Activation Data Flow
... Photometric operation ...
Feature-based
operation
Hybrid Pose Estimation (Fig. )
Mixed KeyFrame
and B.A. (Fig. )
4
5
Figure 2: a. ORB-SLAM2 pipeline without loop closure; b. DSO pipeline; c. MOD SLAM pipeline.
means is to reimplement DSO and ORB-SLAM2
more closely (Figure 2). In this sense, we have a
unique shared map and never run both ORB-SLAM2
and DSO in parallel. Instead, we define an estimation
method allowing to predict the drift measure and to
minimize it frame by frame.
1.2 Contributions
The principal aims of this paper is to increase the ro-
bustness, and to produce the minimal drift of ORB-
SLAM2 and DSO, by introducing a new original
mixed SLAM. The main contributions of our method
are the following:
• We define a novel SLAM architecture which
is ORB-SLAM2-based (Mur-Artal and Tard
´
os,
2017) and DSO-based, with a mixed map provid-
ing a fluid and consistent sharing of the data (in-
cluding frame camera pose and 3d points coordi-
nates) between ORB-SLAM2 and DSO.
• We formulate and evaluate a decision method,
allowing to predict in advance which of ORB-
SLAM2 or DSO will be more robust, at each step
of the SLAM.
• We show in this paper that, by mixing ORB-
SLAM2 and DSO, MOD SLAM can handle 100
percent of the videos, reduce the drift (without us-
ing the loop closure) on KITTI dataset (Geiger
et al., 2012) and on our own phone dataset.
2 ORB-SLAM2 AND DSO
PIPELINES
The left part of figure 2 shows the ORB-SLAM2 and
DSO pipelines. This section intends to give some def-
initions, and to describe briefly the pipelines of ORB-
SLAM2 and DSO, necessary to understand the fol-
lowing description of MOD SLAM.
2.1 Definitions
Immature Point. Initial and temporary status of a
3D point, before deciding whether it is an inlier or
outlier. At keyframe creation of DSO, newly detected
interest points are mapped as 3D points (with un-
known depth) and classified as immature. At the next
keyframe creation, immature points become inlier or
outlier. Outliers can be discarded as there is no loop
closing, hence no chance to become inliers later.
Local Map, Active Points and Frames. The local
map is a subgraph of the map containing all the active
points and frames. The active frames contain the cur-
rent frame and some previous frames, based on covis-
ibility. The active points are all the 3D points visible
in at least one active frame. The local map is updated
during the local map tracking (Section 3.2.4). Only
active points are tracked on the new frames and only
the local map is bundle adjusted during keyframe cre-
ation.
MOD SLAM: Mixed Method for a More Robust SLAM without Loop Closing
693
2.2 Indirect Pipeline: ORB-SLAM2
At each new frame, a pose estimation is performed:
tentative matches between 2D ORB interest points
and 3D points are found. The descriptor of the 3D
point is the coordinate-wise median of the descrip-
tors of ORB points having given birth to it. A best to
second-best descriptor distance ratio is compared to
a threshold to ignore ambiguous 2D/3D point corre-
spondences. The sum of squared residuals of point
projections is then minimized, as a function of the
frame pose (rotation and translation), where at each
iteration a large residual removes the correspondence
from the next energy computation, which can be rein-
serted at a future iteration if its residual becomes
small again.
From this initial pose, numerous new 2D/3D cor-
respondences can be found by descriptor comparison
because the search is restricted to the neighborhood of
the 3D point projection. The same minimization with
all new correspondences allows refining the pose.
When a new keyframe is needed, duplicate 3D
points are merged (culling), new 3D points may be
created by triangulation with matching ORB points in
previous keyframe, and a local bundle adjustment is
performed, with variables the new keyframe pose and
the positions of 3D points. Finally, the new keyframe
is compared to the previous two keyframes to check
whether the middle one is redundant, in which case it
loses its status of keyframe.
2.3 Direct Pipeline: DSO
A photometric energy minimization is performed wrt
pose and light change parameters. Immature points,
3D points with still unknown depth, generated by the
DSO interest points in the preceding keyframe, are
then tracked in the new frame. The success of this
tracking is then used to decide whether to activate the
3D point as mature or to remove it. A local bundle
adjustment is then performed and the marginalisation
can fix some previous keyframes: they are removed
from the local map. Finally, the new keyframe gener-
ates from its 2D interest points immature 3D points.
3 MIXED METHOD
Our mixed method is a fusion of ORB-SLAM2 (Mur-
Artal and Tard
´
os, 2017) and DSO (Engel et al., 2017).
The pipeline shown in figure 2 borrows modules from
both, though both run paths are exclusive: Two func-
tions predict in advance if it is best to use photometric
or feature based method to minimize drift. The first
Frame
Covisiblity
Frame
Interst Point
3D Point
Visibility
Association
Reference
Unique Pose Unique Pose
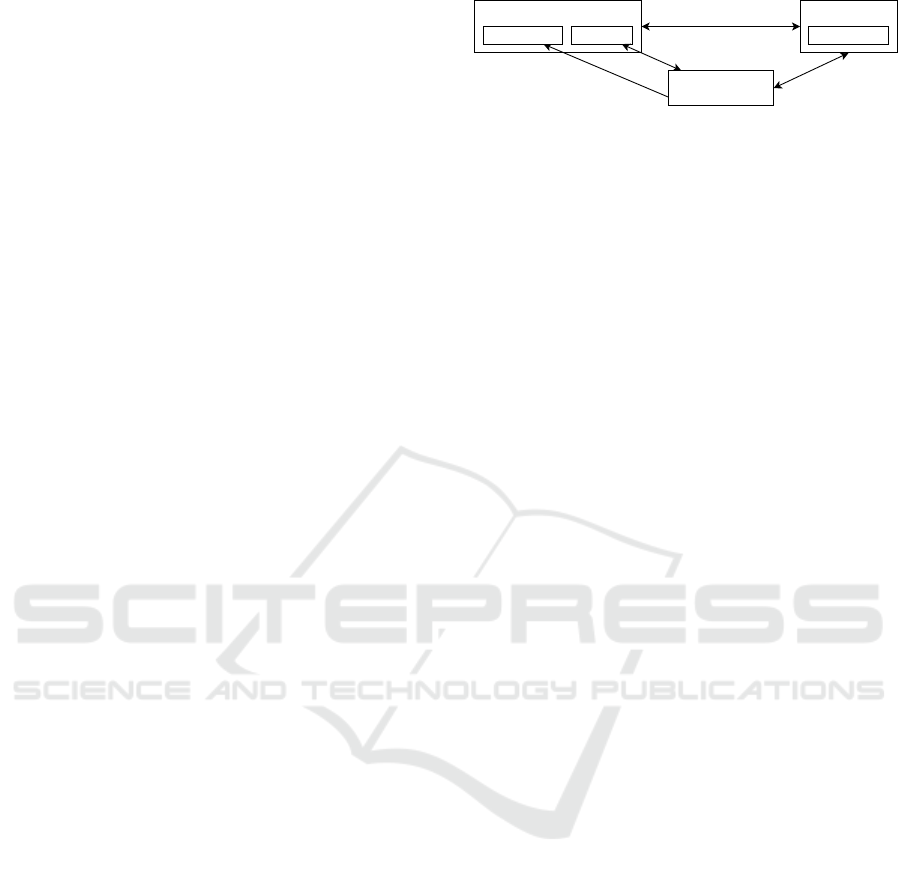
Figure 3: High level representation of the edges in the map
graph.
chooses between tracking with ORB and refining with
DSO, or the contrary, and the second one whether to
use an ORB or a DSO bundle adjustment.
3.1 Map
3.1.1 Mixed Map Structure
Our map is a non-oriented graph, whereas DSO and
ORB maps are oriented graphs, with edges going
from the frames to points. The nodes are:
• The frames including: their camera pose, image,
DSO interest points, ORB interest points and their
respective descriptors, their internal and photo-
metric calibrations. . .
• The 3D ORB points with their position, median
binary descriptor, uncertainty.
• The 3D DSO points with their position repre-
sented with inverse depth parametrization (Civera
et al., 2008), Hessian.
For each frame, the pose estimation is unique. All
poses and 3D points, whether issued from ORB or
DSO, use the same coordinate system.
The edges of the graph represented in figure 3 are:
• Between frames: The covisibility edge between
frames when they see the same points.
• Between Frame and 3D ORB Point:
– Used for the correspondence of the ORB-
SLAM 3D Points with the ORB interest points
– Used when the point is assumed visible inside
the frame according to the camera pose, but is
not matched with an interest point. This allows
knowing the number frames in which the point
is visible but not matched.
• Between Frame and 3D DSO Point:
– When the DSO point is extracted from the
frame, and mapped, hence each DSO point has
only one such edge.
– Used when the point is assumed visible inside
the frame, to track the point and to bundle ad-
just photometrically.
– Used when the point position is relative to its
reference camera, so that the point needs to
move with the camera pose.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
694
Try Predict
Pose
Pose & Light
Prediction
Track
Local Map
Track
Immature
ORB-Based Pose Estimation
DSO-Based Pose Estimation
Try Refine
Pose
On
Failure
Try Refine
Pose
Track Local
Map
Estimate
Light
Pose
Estimation
Decision
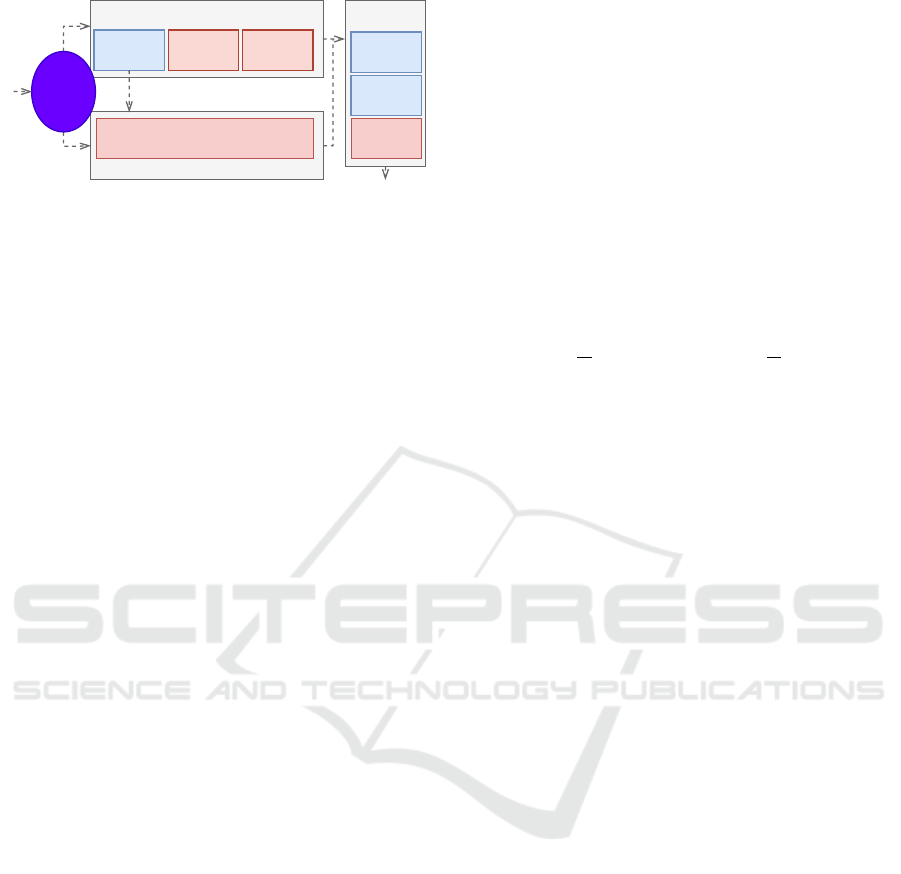
Figure 4: Mixed pose estimation.
3.1.2 Information Transmission
The map is mixed, as it can store, use and transmit
information independently of their representation. It
ensures the consistent storage and transmission of the
information.
DSO and ORB-SLAM2 share and reuse their data
through this map. They have common frame structure
and information (including the camera pose). Option-
ally, DSO points can be used in ORB part, and ORB
points can be used in DSO part.
3.2 Mixed Pose Estimation
The mixed pose estimator represented in the figure
4 works in 3 steps: deciding the pose estimation
method, estimating the pose, tracking and refining the
local map.
3.2.1 Pose Estimation Decision
The role is to decide in advance which of the two pose
methods will produce the less drift:
• An ORB pose prediction refined with DSO, then
refined with ORB in the local map tracking.
• A DSO pose prediction refined with ORB in the
local map tracking.
MOD SLAM use the covariance matrices of the
last estimated poses to make the decision, as they
are an indicator of the uncertainty of DSO and ORB-
SLAM2 methods.
cov
i|orb
= (J
>
i
J
i
)
−1
cov
i|dso
= H
−1
i
(1)
where J
i
is the last i
th
ORB-SLAM2 pose estimator
Jacobian, and H
i
is the last i
th
DSO pose estimator
Hessian.
J
i
and H
i
are computed for the same pose, with
points in the same coordinates system. Hence, cov
i|orb
and cov
i|dso
use the same quantity, and are compara-
ble.
As ORB-SLAM2 and DSO have different rep-
resentations of rotation, MOD SLAM uses the vec-
tor containing the variance of the translation of the
pose [x, y, z]. The variance of x (noted cov
orb|x,x
and
cov
dso|x,x
) appears in the diagonal of the covariance
matrices cov
orb
and cov
dso
:
u
i|orb
= [cov
i|orb|x,x
;cov
i|orb|y,y
;cov
i|orb|z,z
]
u
i|dso
= [cov
i|dso|x,x
;cov
i|dso|y,y
;cov
i|dso|z,z
]
(2)
where u
orb
and u
dso
are the vectors containing the
variance of the translation part of the pose. ku
orb
k and
ku
dso
k are uncertainty estimates for ORB and DSO.
We observe that when ku
orb
k or ku
dso
k becomes
high, it is likely to remain high in the next frames.
For robustness, the covariance over N preceding
keyframes is considered :
v
orb
=
1
N
N
∑
i=1
u
i|orb
v
dso
=
1
N
N
∑
i=1
u
i|dso
(3)
The algorithm take a decision by comparing
kv
orb
k and kv
dso
k. We introduce a parameter w
pe
as
a weight which will influence the decision. A weight
below one will favor DSO tracking, and above one
will favor ORB tracking. (see the table 5 for our cho-
sen value of the parameters).
decision =
(
orb, if ku
orb
k < w
pe
× ku
dso
k
dso, otherwise
(4)
3.2.2 DSO-based Pose Estimation
The DSO-Based Pose Estimator works unmodified. A
batch of motion guesses is computed by perturbing in
different ways the motion of the previous frame. For
each, a photometric pose estimation is done. The esti-
mator will keep the pose with the lowest photometric
RMSE.
This pose estimation is followed by an optional
ORB refinement, inside the local map tracking (Sec-
tion 3.2.4). Therefore, this tracking method is still
mixed.
On most of the images, this yields fast a pre-
cise pose estimation. However, the estimation is not
always the best, especially on video like the Kitti
dataset where the photometric error of the tracked
points is often high.
3.2.3 ORB-based Pose Estimation
The ORB-Based Pose Estimation is a combination of
the ORB-SLAM2 pose estimation, and DSO pose op-
timization:
1. First, the SLAM will try to track with a constant
velocity motion model using only ORB points,
2. If the number of tracked points is too low, try to
track with a standard PnP model.
MOD SLAM: Mixed Method for a More Robust SLAM without Loop Closing
695
3. If the number of tracked points is still below a
threshold, ORB tracking is considered a failure,
and it falls back to a DSO-Based Pose Prediction.
4. Then MOD-SLAM tries to refine with DSO, by
minimizing the photometric error using only the
DSO points. The refined camera is accepted only
if the ratio of inliers points r
dso
(with a photo-
metric error below a threshold, Table 5) is low
enough. In all cases, DSO refinement will com-
pute and store the light change.
As observed in section 3.2.2, DSO Pose estima-
tor does not always return the best result. Still, when
DSO finds a good initial motion, it generally results
in a more precise camera position than ORB. The idea
behind our ORB-Based Pose Prediction is to feed the
DSO pose optimizer directly a good motion found by
ORB, to find the most precise camera pose.
When the DSO refinement is not accepted, the
assumption is that DSO was too weak, and that it
would have added a lot of drift. When ORB failed,
the SLAM switches to a DSO-based pose estimation,
because of the ability of the DSO coarse pose estima-
tor to almost always find a pose, with a decent quality
despite the drift.
3.2.4 Local Map Tracking
After each pose estimation, MOD SLAM tracks the
ORB local map like a standard ORB-SLAM2. The
active ORB 3D points are re-projected into the current
frame, to make 2D-3D matches. New active ORB 3D
points are computed, according to the previous neigh-
bor frames. Then, the algorithm can choose between
just computing the covariance of the ORB-SLAM2
pose estimator, or refining by indirectly optimizing
the pose of the camera. When DSO was not used
to refine or track, ORB based refinement is launched,
as the result is likely to improve. Otherwise, MOD
SLAM uses the inlier ratio of photometric points r
orb
(Table 5) as an indicator of the quality of the DSO
pose estimator. If it is higher than a threshold, MOD
SLAM refines with ORB, else computes only the co-
variance matrix of ORB.
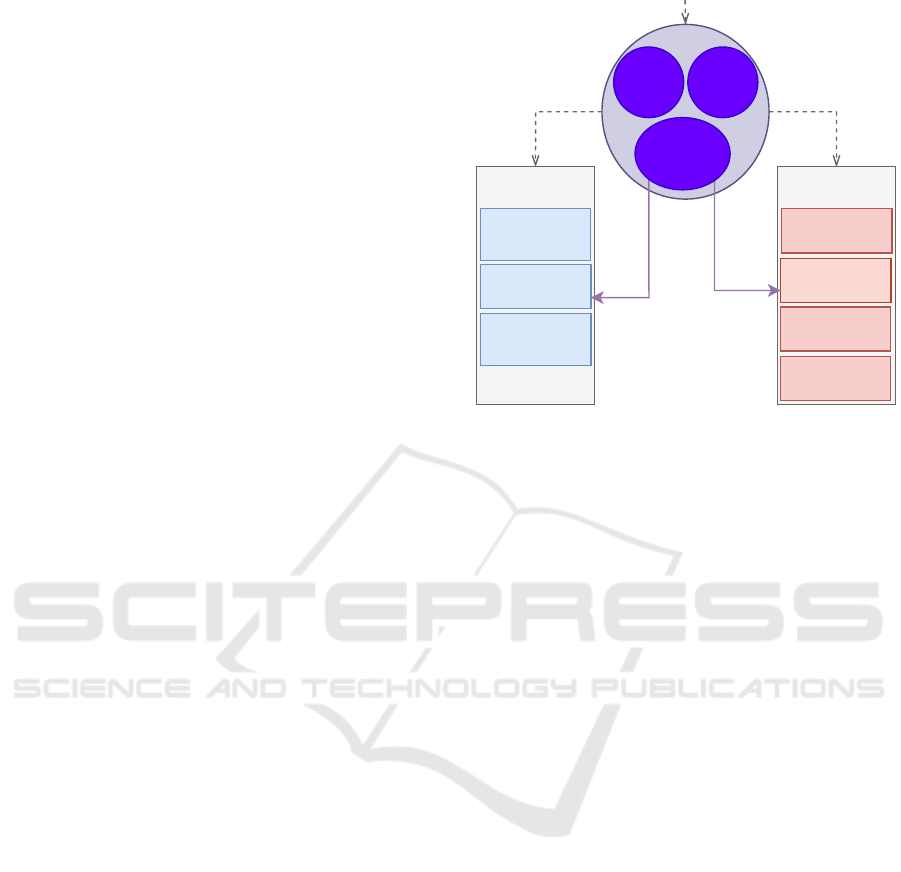
3.3 Mixed Keyframe Creation and
Bundle Adjustment
The mixed keyframe creation and bundle adjustment
choice pipeline is represented in the figure 5.
3.3.1 Bundle Adjustment Decision
Bundle Adjustment decision has a huge impact on the
drift.
Activate Points
Marginalisation
Create Immature
Points
Activate &
Create Immature
Points
Local
KeyFrames
Culling
DSO Keyframe
creation
Bundle Adjust
Bundle Adjust
ORB
KeyFrame
Decision
ORB Keyframe
creation
Bundle
Adjustment
Decision
Only If selected
Only If selected
ORB DSO
Need ORB
Keyframe
Need DSO
Keyframe
DSO
KeyFrame
Decision
Figure 5: Mixed Keyframe creation and Bundle Adjust-
ment.
1. If the number of points tracked by ORB is too low,
only DSO can give a good result, even if it can be
also weak.
2. If the ratio of photometric outliers points higher
than a fixed threshold r
ba
, ORB is favored.
3. The bundle adjustment method is chosen by com-
paring the number of inliers tracked by DSO and
by ORB. We introduce a weight w
ba
which will
influence this decision (see the table 5 for the pa-
rameters).
3.3.2 Keyframe Creation
Two different pipelines are used to create ORB-
SLAM2 and DSO key frame. If a DSO bundle ad-
justment is requested, MOD SLAM try first to create a
DSO key frame, then a ORB-SLAM2 key frame. And
if an ORB-SLAM2 bundle adjustment is requested,
MOD SLAM tries first to create an ORB-SLAM2 key
frame, then a DSO key frame.
ORB-SLAM2 and DSO key frames are created
based on their own criteria: for ORB-SLAM2, it is
based on the number of tracked points, whereas for
DSO it is based on the optical flow.
Let t
n
and a
n
be the number of tracked ORB points
and active ORB 3D points at time n. The original
ORB condition for keyframe creation is a
n
< t
n
× 0.9
wheras MOD SLAM condition is t
n
< exp(log(a
n
) ×
0.975). This gives almost the same result for a low
number of points, but MOD SLAM condition pro-
duces fewer keyframes for a high number of points.
High movement of the pose or high residual will pro-
duce a DSO keyframe.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
696

DSO key frames creation remains unchanged.
ORB-SLAM2 key frame creation keeps the same
method, but use the same principle of immature point
as DSO, with a stricter new point filtering, based on
the covariance of the coordinates of the point.
During the keyframe creation, only the B.A. of the
chosen type will be run. Therefore, it is possible to
choose a B.A. of a type, but to not choose to create
a keyframe of this type. In this case, no B.A. will be
executed. DSO and ORB have their own local map. It
means that DSO will bundle adjust its own local map
and ORB its own local map.
ORB bundle adjustment consists of a Levenberg-
Marquardt optimization of the reprojection error of
the active map. DSO bundle adjustment consists of a
Gauss-Newton optimization of the photometric error
on a window of 6 frames with their points.
4 RESULTS
Our SLAM library and MOD SLAM source code
used to obtain the results below are ready to be re-
leased upon publication of the article.
4.1 Parameters
The table 5 represent the parameters that we choose
for MOD SLAM, compared to those of ORB-SLAM2
and DSO. Note that these parameters have not been
strongly tuned. They have been chosen as a compro-
mise with speed and accuracy. The original ORB-
SLAM2 implementation uses 2000 points for the
KITTI dataset, and 1000 points for the TUM dataset,
whereas we use 1250 for both. The original DSO has
two modes: the normal mode with a desired density of
2000 points (used for the evaluation), and a fast mode
with a desired density of 800 points. We choose to
use the same parameters as the fast mode of DSO.
4.2 Results and Performance
KITTI. KITTI Odometry dataset (Geiger et al.,
2012) is made of multiple stereo car sequences, from
1 to 8 minutes, taken with a resolution of 1241x376
at 10 fps. Only the grayscale left images of the stereo
pair have been used for the evaluation. The table 1
shows the result on the KITTI dataset. In most cases,
we get the best of ORB-SLAM2 and DSO. We ob-
served for some videos a significant reduction of the
drift. Some trajectories have been plotted in the fig-
ure 6. Even if our SLAM is a mix of ORB and DSO,
each computation is never done twice in an indirect or
a direct manner. On an i9-10900 with 20 threads, the
SLAM needs 5% of CPU usage to run in real-time
on KITTI dataset, and only 2 GB of RAM with the
biggest video of KITTI comprising 4541 frames.
Table 1: Absolute Trajectory Error on KITTI datasets
(Geiger et al., 2012). The last line is the number of times
a method has given the best result. ORB-SLAM2 has been
evaluated without loop closure, so we obtained different re-
sults from the original paper, but7 almost the same result as
CNN-SVO (Loo et al., 2019).
Ours ORB. DSO
00 105m 67m 114m
01 12m x x
02 43m 43m 120m
03 1.8m 1.0m 2.1m
04 1.1m 0.9m 1.5m
05 40m 43m 52m
06 44m 49m 59m
07 16m 17m 17m
08 54m 58m 111m
09 39m 60m 63m
10 11m 9m 16m
Best 7 6 0
TUM. TUM Monocular Visual Odometry Dataset
(Engel et al., 2016) is made of multiple grayscale
monocular interior sequences. The images have been
captured with a resolution of 1280x1024 reduced to
640x480 at runtime, at 30 fps. The dataset contains
precise internal and photometric calibration. ORB-
SLAM2 failed in almost half of the videos, whereas
DSO and MOD SLAM ran successfully on all the
videos. The results between DSO and MOD SLAM
are tight. MOD SLAM could not improve more the
result of DSO as it already gave almost perfect re-
sults. On an i9-10900 (10 cores, 20 threads, 2.8 to 5.2
GHz), the SLAM needs 20% of CPU usage to run in
real-time on TUM dataset.
Smartphone Videos. Using a Google Pixel 3a cam-
era, we have filmed perfect loops inside a room, at a
resolution of 1920x1080 downsampled to 640x360.
The camera was calibrated with the OpenCV library
(Bradski, 2000) and a chessboard. We have run the
three SLAM methods on each video to evaluate the
drift generated by each method. The results are plot-
ted in the figure 7. ORB-SLAM2 got lost on all the
videos. Observe how the loop closes: MOD SLAM
and DSO get almost the same result, excepting for
some videos where we can observe a small improve-
ment for MOD SLAM.
Robustness. Table 2 shows that MOD SLAM is the
only method that can run on all the videos, without
MOD SLAM: Mixed Method for a More Robust SLAM without Loop Closing
697
changing any parameters, while still keeping the ac-
curacy of ORB on KITTI, and the density of the gen-
erated point cloud of DSO on TUM dataset (Figure 1).
Table 2: Number of success on TUM Monocular Dataset
(Engel et al., 2016), KITTI dataset (Geiger et al., 2012),
and our own smartphone videos.
Ours ORB. DSO
TUM 50 50 (100%) 28 (56%) 50 (100%)
KITTI 11 11 (100%) 10 (91%) 10 (91%)
P3 5 5 (100%) 0 (0%) 5 (100%)
Total 66 66 (100%) 38 (58%) 65 (98%)
4.3 Ablation Study
Table 3: Decision effect in our MOD SLAM methods. Each
value is an average of the absolute trajectory error in the
KITTI dataset with a Forced ORB/Forced DSO on Mixed
Tracking/Mapping decision. An empty case means that the
ATE is averaged with all the possibilities (ORB / DSO /
Mixed).
Tracking Mapping Averaged ATE on KITTI
ORB 62m
ORB 65m
DSO 46m
DSO 52m
Mixed 39m
Mixed 36m
MOD-SLAM uses multiple decision systems to
predict which of ORB-SLAM2 and DSO will perform
best. To make these decisions in advance, it is neces-
sary to evaluate the robustness of ORB-SLAM2 and
DSO. SLAM internal measurement, such as the co-
variance matrices, or the number of inliers, can be
tested to find the most robust method. The table 3
evaluates the impact of the decision of MOD SLAM
on the final result. We have tested to favor ORB-
SLAM2 then DSO during the tracking decision, and
the mapping decision. We averaged the absolute tra-
jectory error on the KITTI dataset in the table 3. We
observe clearly that both tracking and bundle adjust-
ment conditions have a big impact on the final results.
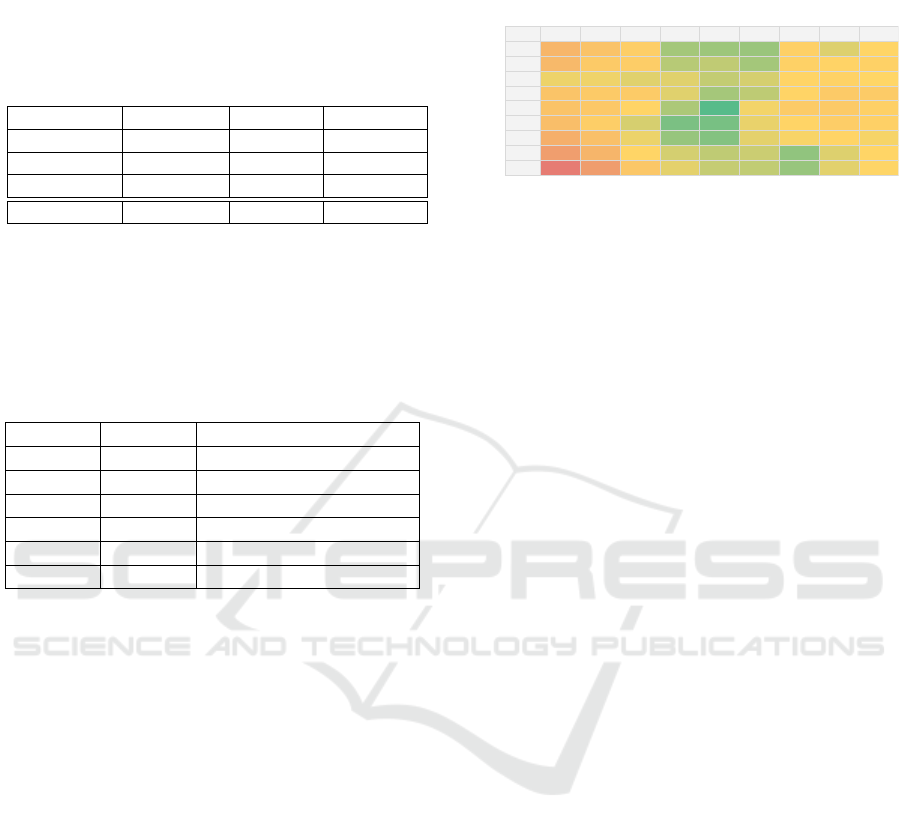
Table 4 is an example of parameter study. It
shows the impact of an outlier ratio threshold dur-
ing the tracking (vertical axis) and the bundle adjust-
ment (horizontal axis). A threshold of 0 means that
the SLAM always selects ORB, and a threshold of
15 means that the SLAM always selects DSO. The
SLAM seems to perform better with an in-between
threshold of 7.5, suggesting that the SLAM gives bet-
ter result in a mixed manner.
Table 4: ATE w.r.t. DSO outliers ratio threshold for tracking
and BA decision on KITTI 08 (meters).
Outliers Ratio Threshold
For the bundle adjustment decision
Outliers Ratio Threshold
For the tracking decision
0 1,875 3,75 5,625 7,5 9,375 11,25 13,125 15
0 140m 124m 111m 87m 86m 85m 108m 96m 103m
1,875 136m 116m 112m 90m 91m 87m 107m 105m 107m
3,75 98m 98m 96m 96m 92m 94m 103m 106m 101m
5,625 123m 115m 114m 96m 87m 91m 104m 116m 114m
7,5 124m 118m 104m 88m 75m 99m 115m 116m 108m
9,375 130m 111m 94m 81m 80m 97m 103m 112m 108m
11,25 148m 128m 98m 85m 82m 97m 100m 103m 99m
13,125 168m 141m 103m 94m 91m 93m 84m 96m 102m
15 209m 170m 119m 97m 92m 91m 85m 96m 101m
A treshold of 0 means always select ORB
A treshold of 15 means always select DSO
4.4 Discussion
ORB-SLAM2 has a lot of trouble handling the TUM
dataset and our videos. Weird camera movement may
be responsible, for instance when the camera goes un-
der a desktop table on the TUM dataset. Also some
images do not contain enough reliable ORB points,
as the filmed surfaces are too flat. On the contrary,
DSO gives the worst result on KITTI dataset, proba-
bly because the photometric optimization has trouble
handling the big motion and the noisy images.
MOD SLAM did not fail on any video, contrary to
ORB-SLAM2 and DSO, despite using the same pa-
rameter set for all the datasets (which have not been
strongly tuned). Hence, it proves the robustness of
MOD SLAM.
The method (Lee and Civera, 2018) mentioned in
the introduction runs a full version of DSO and ORB-
SLAM2, side by side, with two separate maps. It al-
lows having the loop closure and BA system of ORB-
SLAM2 with DSO, in the cost of multiplying by 2 the
computational CPU and RAM resources. But it shows
no robustness and no drift improvement on videos
without a loop as one method is always privileged.
On the other hand, MOD SLAM uses one unique
map, and has to choose the tracking method at each
frame (Figure 2). The computational resources do not
increase: a refinement by the complementary method
(ORB-SLAM2 or DSO) is done, which is fast since
the pose is already close to the solution. Contrary to
(Lee and Civera, 2018), MOD SLAM has proven to
be more robust and to yield lower drift.
5 CONCLUSION
Our flexible map has permitted the creation of a
mixed ORB-SLAM2/DSO architecture. We have
shown with the result on the KITTI dataset (Table 1)
and on our own dataset the potential of MOD SLAM
compared to the original ORB-SLAM2 and DSO: on
most videos, MOD SLAM succeeds in giving the best
of the two methods. Observe that on KITTI 01, MOD
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
698
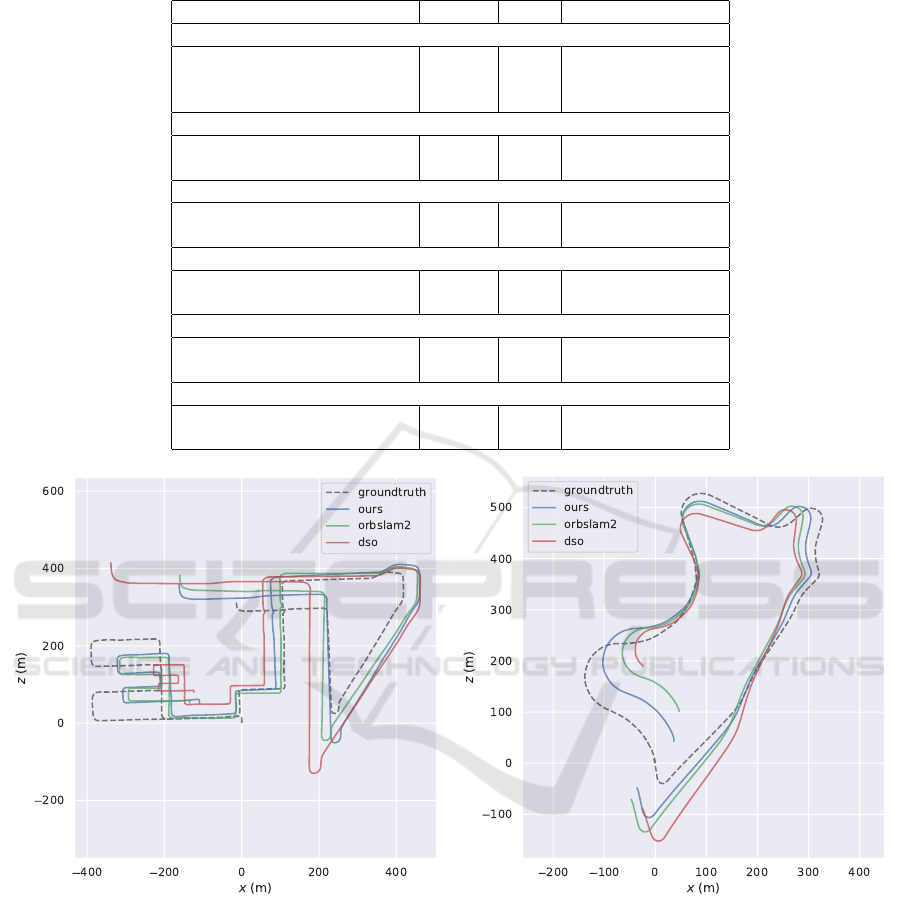
Table 5: Parameters used for the evaluation. N.A. = Non-applicable.
Method Ours DSO ORB
Point Density
Number of ORB Corner 1250 N.A. 2000
Desired DSO Point Density 800 2000 N.A.
Number of DSO Corner 600 1500 N.A.
DSO Bundle Adjustment
Iteration 4 6 N.A.
Optimization Window Size 6 7 N.A.
ORB Bundle Adjustment
Iteration 5 N.A. 0 to 5
Refinement Iteration 0 N.A. 0 to 10
Pose Estimation Decision (Section 3.2.1)
Covariance weight w
pe
0.75 N.A. N.A.
Average Window Size N 7 N.A. N.A.
Pose Estimation and refinement (Section 3.2.3 and Section 3.2.4)
Inliers Ratio r
dso
0.85 N.A. N.A.
Inliers Ratio r
orb
0.85 N.A. N.A.
Bundle Adjustment Decision (Section 3.3.1)
Outliers Ratio r
ba
0.15 N.A. N.A.
Number of point weight w
ba
0.0125 N.A. N.A.
Figure 6: Kitti (Geiger et al., 2012) Trajectories 08 and 09.
SLAM is the only method able to process the full
video, and that on KITTI 09 the error is drastically
lower.
A finer decision function would have the potential
to still lower the drift. Therefore, our future works
include to work on the decisions functions.
ACKNOWLEDGMENTS
We thank Pierre-Alain Langlois for assistance with
using OpenMP, Ceres, and other C++ libraries; Ab-
derahmane Bedouhene for comments that greatly im-
proved the paper; and Thomas Daumain for double
checking the results. This work has been supported
by the project UrbanVision. Initiated in 2018, Urban-
Vision is a project of the I-SITE FUTURE, a French
initiative to answer the challenges of sustainable city.
MOD SLAM: Mixed Method for a More Robust SLAM without Loop Closing
699

REFERENCES
Bradski, G. (2000). The OpenCV Library. Dr. Dobb’s Jour-
nal of Software Tools.
Chahine, G. and Pradalier, C. (2018). Survey of monoc-
ular SLAM algorithms in natural environments. In
2018 15th Conference on Computer and Robot Vision
(CRV), pages 345–352.
Civera, J., Davison, A. J., and Montiel, J. M. (2008). Inverse
depth parametrization for monocular SLAM. IEEE
transactions on robotics, 24(5):932–945.
Engel, J., Koltun, V., and Cremers, D. (2017). Direct sparse
odometry. IEEE transactions on pattern analysis and
machine intelligence, 40(3):611–625.
Engel, J., Usenko, V., and Cremers, D. (2016). A photo-
metrically calibrated benchmark for monocular visual
odometry. In arXiv:1607.02555.
Ferrera, M., Eudes, A., Moras, J., Sanfourche, M., and
Besnerais, G. L. (2021). OV
2
SLAM : A fully online
and versatile visual slam for real-time applications.
Forster, C., Pizzoli, M., and Scaramuzza, D. (2014). SVO:
Fast semi-direct monocular visual odometry. In 2014
IEEE international conference on robotics and au-
tomation (ICRA), pages 15–22. IEEE.
Forster, C., Zhang, Z., Gassner, M., Werlberger, M., and
Scaramuzza, D. (2017). SVO: Semidirect visual
odometry for monocular and multicamera systems.
IEEE Transactions on Robotics, 33(2):249–265.
G
´
alvez-L
´
opez, D. and Tard
´
os, J. D. (2012). Bags of binary
words for fast place recognition in image sequences.
IEEE Transactions on Robotics, 28(5):1188–1197.
Gao, X., Wang, R., Demmel, N., and Cremers, D. (2018).
LDSO: Direct sparse odometry with loop closure. In
2018 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS), pages 2198–2204.
IEEE.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the KITTI vision benchmark
suite. In Conference on Computer Vision and Pattern
Recognition (CVPR).
Klein, G. and Murray, D. (2007). Parallel tracking and map-
ping for small AR workspaces. In 2007 6th IEEE
and ACM international symposium on mixed and aug-
mented reality, pages 225–234. IEEE.
Lee, S. H. and Civera, J. (2018). Loosely-coupled semi-
direct monocular ”slam”. IEEE Robotics and Automa-
tion Letters, 4(2):399–406.
Loo, S. Y., Amiri, A. J., Mashohor, S., Tang, S. H.,
and Zhang, H. (2019). CNN-SVO: Improving the
mapping in semi-direct visual odometry using single-
image depth prediction. In 2019 International Con-
ference on Robotics and Automation (ICRA), pages
5218–5223. IEEE.
Lothe, P., Bourgeois, S., Dekeyser, F., Royer, E., and
Dhome, M. (2009). Towards geographical refer-
encing of monocular SLAM reconstruction using 3d
city models: Application to real-time accurate vision-
based localization. In 2009 IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 2882–
2889.
Mur-Artal, R., Montiel, J. M. M., and Tardos, J. D.
(2015). ORB-SLAM: a versatile and accurate monoc-
ular SLAM system. IEEE transactions on robotics,
31(5):1147–1163.
Mur-Artal, R. and Tard
´
os, J. D. (2017). ORB-SLAM2:
An open-source SLAM system for monocular, stereo,
and RGB-d cameras. IEEE Transactions on Robotics,
33(5):1255–1262.
Newcombe, R. A., Lovegrove, S. J., and Davison, A. J.
(2011). DTAM: Dense tracking and mapping in real-
time. In 2011 international conference on computer
vision, pages 2320–2327. IEEE.
Singandhupe, A. and La, H. M. (2019). A review of SLAM
techniques and security in autonomous driving. In
2019 Third IEEE International Conference on Robotic
Computing (IRC), pages 602–607.
Strasdat, H., Montiel, J., and Davison, A. J. (2010). Scale
drift-aware large scale monocular SLAM. Robotics:
Science and Systems VI, 2(3):7.
von Stumberg, L., Usenko, V., Engel, J., St
¨
uckler, J., and
Cremers, D. (2017). From monocular SLAM to au-
tonomous drone exploration. In 2017 European Con-
ference on Mobile Robots (ECMR), pages 1–8.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
700

Figure 7: Trajectories of videos taken with a Google Pixel 3a. The videos end at the same place they started. The closer the
two trajectory ends, the lower the drift. ORB-SLAM2 got lost on all the videos.
MOD SLAM: Mixed Method for a More Robust SLAM without Loop Closing
701
