
Multi-label Classification of Aircraft Heading Changes using
Neural Network to Resolve Conflicts
Md Siddiqur Rahman
1,2,4 a
, Laurent Lapasset
2,4
and Josiane Mothe
3,4
1
IRIT UMR5505 CNRS, Univ.de Toulouse 1 Capitole, Toulouse, France
2
DEVI, Ecole Nationale de l’Aviation Civile, Toulouse, France
3
INSPE, IRIT, UMR5505 CNRS, Toulouse, France
4
Univ.de Toulouse, Toulouse, France
Keywords:
Aircraft Conflict Resolution, Machine Learning, Neural Network, Multi-label Classification.
Abstract:
An aircraft conflict occurs when two or more aircraft cross at a certain distance at the same time. Aircraft
heading changes are the common resolution at the en-route level (high altitude). One or more alternative
heading changes are possible to resolve a single conflict. We consider this problem as a multi-label clas-
sification problem. We developed a multi-label classification model which provides multiple heading ad-
visories for a given conflict. This model we named CRMLnet is based on the use of a multi-layer neural
network that classifies all possible heading resolution in a multi-label classification manner. When com-
pared to other machine learning models that use multiple single-label classifiers such as SVM, K-nearest,
and LR, our CRMLnet achieves the best results with an accuracy of 98.72% and ROC of 0.999. The sim-
ulated data set which consists of conflict trajectories and heading resolutions we have developed and used
in our experiments is delivered to the research community on demand. It is freely accessible online at:
https://independent.academia.edu/MDSIDDIQURRAHMAN9.
1 INTRODUCTION
The position of two or more aircraft is considered a
conflict situation if they fall in a distance less than
the 5 nautical miles horizontally when crossing each
other (Kuchar and Yang, 2000; Prandini et al., 2000).
Once a conflict is identified, Air Traffic Control Offi-
cers (ATCOs) must make a quick decision to solve
it. ATCOs consider many parameters such as the
position of the aircraft (latitude, longitude, altitude),
speed, destination, flight plan, as well as other ele-
ments of the environment, for instance, weather, wind
direction, military zone, etc.
Although James et al. (Kuchar and Yang, 2000)
paper is about twenty years old now, however, it pro-
vides an overview of the approaches used for con-
flict detection and resolution. Early solutions to
solve aircraft conflicts relied on mathematical mod-
els such as probabilistic and statistic models (Prandini
et al., 1999). More recently, machine learning models
(Srinivasamurthy et al., 2018) including deep learning
(Nanduri and Sherry, 2016; Brittain and Wei, 2018)
a
https://orcid.org/0000-0002-9314-5377
have been used. There are three types of conflict:
short-range for which an on-board automatic systems
exist that automatically change the altitude/heading of
the aircraft, mid-range (5-20 mn) where the ATCO
solves the conflict by changing the angle of one air-
craft trajectory, and long-range (20-60 mn) where the
usual solution is to change the initial flight path by
selecting a different way point. In this research, we
consider mid-range conflicts.
Our contribution is two-folds: First, we created a
dataset with multi-label annotations where for each
conflict sample, the different solutions are labeled.
Second, we will release this unique dataset that can
be used for conflict resolution evaluation.
With regard to conflict resolution, most related
work uses the current position of the aircraft from
which the future position projection and the distance
between the aircraft is calculated using speed, angle
between them, time, and many more parameters, pos-
sibly from different sources including on-board data
(Prandini et al., 1999; Prandini et al., 2000; Pham
et al., 2019a; Kim et al., 2016; Pham et al., 2019b).
The aircraft positions are approximate positions and
this can lead to some wrong calculations. We thus
Rahman, M., Lapasset, L. and Mothe, J.
Multi-label Classification of Aircraft Heading Changes using Neural Network to Resolve Conflicts.
DOI: 10.5220/0010829500003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 403-411
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
403

rather consider the 5-minutes trajectory of each air-
craft just before the conflict would occur. Our model
then learns from the aircraft movement and do not use
other calculated features.
The conflict resolution is cast as a multi-label clas-
sification problem where each class corresponds to a
possible angle change in trajectory. We consider a
multi-layer perceptron (MLP) neural network. Such
models have successfully been used mostly in com-
plex classifications or approximation tasks (Gardner
and Dorling, 1998). While in related work, the mod-
els are designed to provide a single solution to solve
the conflict, our model provides multiple alternative
solutions where ATCO can choose the best one con-
sidering the future possible conflicts. One solution
only may be appropriate in resolving the current con-
flict but may create new conflicts in the future, while
another solution may be both appropriate for the cur-
rent conflict without producing a new conflict later.
For evaluation purposes, we have also developed
other multi-label supervised models based on support
vector machine, logistic regression, and K-nearest
neighbors where we used separate classifiers for each
output class-label solution and compare them with the
neural network-based model.
This paper is organized as follows. Section 2 dis-
cusses related work. Section 3 presents the data that
are used to train the model and the data sources. Sec-
tion 4 discusses in detail the architecture of our neural
network-based model. All the performance evalua-
tions are detailed in Section 5. Section 6 presents the
results and discusses them. Finally, Section 7 con-
cludes this paper and provides future directions.
2 RELATED WORK
Mathematical models were widely used as the earliest
solutions to conflict detection and resolution (Pran-
dini et al., 1999; Prandini et al., 2000; Alonso-Ayuso
et al., 2013; Agogino and Tumer, 2012; Bayen et al.,
2005). (Paielli and Erzberger, 1997) and (Erzberger
et al., 1997) applied a probability distribution method
for conflict detection by projecting the nearest future
of the involved aircraft. Prandini et al. proposed
two different models for mid-range and short-range
conflict detection considering speed control (Prandini
et al., 1999; Prandini et al., 2000). In real conditions,
an ATCO usually avoids changing the aircraft speed
because this is a cause of fuel over-consumption.
(Pham et al., 2019a) showed noise-free information is
required for mathematical models while that is diffi-
cult to get in real-time because surveillance radar in-
formation is an approximate location of the aircraft.
Thus, it is difficult to clean data while the number of
aircraft increases.
Some research has proposed resolutions for free
flights assuming a pilot can change his/her flight route
in the mid-flight if s/he wants to. Eby and Kelly ap-
plied a distributed algorithm for free flight in (Eby and
Kelly, 1999) where they assume that each aircraft can
communicate with the others and change their flight
plans. Alam et al. use a popular ensemble approach
where each aircraft has an on-board system to share
information with the surrounding aircraft (Alam et al.,
2009). Also, (Jiang et al., 2018) used Support Vec-
tor Machine (SVM) for free flights mainly consider-
ing the current position, velocity, and predicted look-
ahead time as the parameters. Although the solutions
on the free flight is appealing, currently, the aircraft
cannot communicate with each other.
Researchers are turning to the application of ma-
chine learning to solve conflicts with effective results
(Alam et al., 2009; Kim et al., 2016; Brittain and Wei,
2018; Jiang et al., 2018; Pham et al., 2019a; Pham
et al., 2019b; Wang et al., 2019; Lapasset et al., 2020;
Rahman, 2020).
Recently, Rahman et al. (Rahman, 2020; Lapas-
set et al., 2020) discussed various data sources and
proposed to creating a deep learning model to resolve
aircraft collisions. But the concept is limited in the-
ory, with no experimental results. (Kim et al., 2016)
present a performance analysis of two separated mod-
els to solve a conflict between two airplanes: a neu-
ral network-based and a SVM-based, both supervised.
The SVM model combines 9 SVM, one per class la-
bel, each one predicts different category of resolu-
tions. Similarly, the neural network model is com-
posed of 9 output nodes. The model output is a vector
of 9 class labels that are all zero except for the most
probable one which corresponds to the best predicted
action. Their dataset contains category-based resolu-
tions such as vertical, horizontal, and speed control.
For example, there are two resolutions for horizontal
conflicts: Direct-to and Path stretch, where Direct-
to means the resolution maneuver is to skip some
initial way-points and go direct to the targeted way-
point whereas Path stretch is to add new way-points
to make the resolution more flexible. In this case, the
model only predicts these categories. The limitation
here is that there is no exact heading direction to re-
solve the conflict. Still, ATCO needs to think about
the resolutions before taking a decision.
Reinforcement learning has been used to resolve
aircraft conflicts. (Brittain and Wei, 2018) applied
a two-level agent-based deep reinforcement learning
following a hierarchical network. In the first agent,
a convolutional neural network is applied to an air
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
404

traffic control video game (NASA Sector 33) image
which selects the most suitable route by applying all
possible initial route combinations. The second agent
adjusts the speed for the route. In their case, there
is no option to modify the initial route. Also, as
mentioned earlier, resolving conflicts by changing the
speed is avoided in practice. (Pham et al., 2019b;
Pham et al., 2019a) applied a single deep reinforce-
ment network in the specific case of two aircraft at
the same altitude. Since the resolution action is not
finite, an agent-based reinforcement learning resolves
the conflict by applying an infinite number of actions.
For each action, it gets rewards (rank) with either pos-
itive (successful) or negative (unsuccessful) feedback.
From this feedback, the model fits itself. Here, the
challenge is to design a reward function based on the
quality of the solution. Quality comes from selecting
a set of features that is a kind of rule or condition.
Although recently neural network-based rein-
forcement learning model is widely used, as discussed
earlier, the challenge is to define a reliable reward
function because this function is used to find solutions
without the use of labeled input-output pairs. In our
research, the most remarkable thing is that our model
takes 5-minute continuous positions for each aircraft,
while prior related work considers the current position
only and thus needs to perform feature engineering
under many conditions. Trajectory data is not noise-
free (all the aircraft positions are approximated), thus,
it is risky to use strict mathematical conditions such as
calculating distances, angles, to create new features.
We are of the opinion that a model that takes a se-
ries of positions for each aircraft to learn the conflict
environment and provides multiple solutions would
reduce that risk. The existing models are design to
find a single solution to a conflict. We rather propose
multiple solutions for a single conflict the ATCO can
choose among considering the future possible con-
flicts. We consider multi-label (multiple output for
one input) supervised models.
3 DATA
Three main sources could be use to get trajectory and
ATCO’s immediate order: (a) open-source data, (b)
radar data from ATC station, and (c) simulated data.
In this paper, we used the third one.
Original trajectory data is generally kept confiden-
tial and therefore not publicly available. No simu-
lated data is even available publicly. The problem to
use open source data such as from OpenSky Network
(Sch
¨
afer et al., 2014) is to synchronize huge trajectory
storage and ATC orders. Another issue is that there is
no information on the heading change if it is a con-
flict with the aircraft or not. Since the ATCO voice
command is sensitive, time-consuming, and difficult
to obtain, in our paper we rather consider simulate
data.
The primary components of the aircraft trajectory
are latitude, longitude, and altitude. It is sometimes
called the 4D trajectory where time is the 4
th
dimen-
sion (Wandelt and Sun, 2014). An immediate order
is a voice communication between a controller and
a pilot to guide him/her to avoid a conflict situation.
According to Pavlinovi
´
c et al. in (Pavlinovi
´
c et al.,
2013), different controllers operate at different phases
based on their altitude level such as pre-flight, take-
off, departure, en-route, decent, approach, and land-
ing. In our study, we consider the en-route phase (top
height level) only where the altitude (height) of the
aircraft usually remains unchanged. The common res-
olution maneuver is heading direction either turn left
or right with a certain angle.
We generated the trajectory and controller’s im-
mediate order datasets using an open-source simula-
tor named Blue Sky developed at TU Delft by Hoek-
stra and Ellerbroek (Hoekstra and Ellerbroek, 2016).
There are many advantages to use simulators. First,
it is easy to create conflict scenarios. Second, many
variations can be created, which may not be possible
to find in real data. We generated different conflict
scenarios where a single instance contains every 10
seconds following a 5-minute window of trajectory
for a pair of aircraft and the resolutions. Thus, we
consider two planes in such a way they can create a
conflict situation. Both aircraft’s position is 20 min-
utes away from the conflict point. We store 5 minutes
of trajectory data of them that is just before the con-
flict detection. Therefore, after detecting the conflict
we have 15 minutes to reach the conflict point. Our
model makes the resolution decision based on that 5-
minute trajectory.
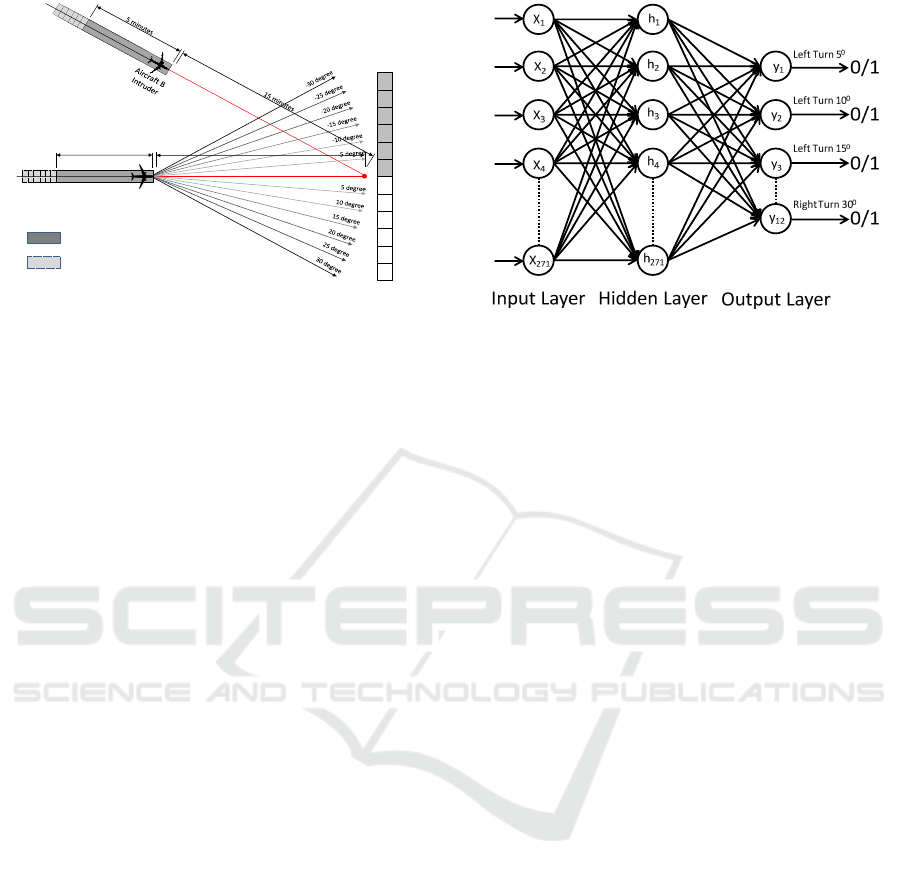
The parameters we stored are latitude, longitude,
altitude, speed of both planes, and angle between
them. Figure 1 shows a scenario with possible resolu-
tions (range: from left 30
0
to right 30
0
). At en-route
level, ATCOs usually change the heading degree by
a multiple of five (e.g. an immediate order could be
TURN LEFT 5
0
or TURN LEFT 10
0
as shown in Fig-
ure 1). We do not consider the heading resolution in
both sides (LEFT and RIGHT) at a time. We always
take the heading to the side where the angle between
the planes is the smallest. If there is no solution, then
we look for the other side. Figure 1 shows solutions
on the side of lower angle. Here, the column vector
with multiple binary decisions shows an example of
the left heading resolution only. We applied different
Multi-label Classification of Aircraft Heading Changes using Neural Network to Resolve Conflicts
405
1
1
1
1
0
0
0
0
0
0
0
0
Left heading
Right heading
Aircraft A
Ownship
Conflict Point
5 minutes
Last 5 minutes trajectory window
All previous 5 minutes trajectory windows
15 minutes
Figure 1: There are different heading changes to solve a
conflict. Here, the shadow behind each plane shows the tra-
jectory of the previous 5 minutes. Aircraft A can change its
heading between left 30
0
and right 30
0
to solve the conflict
while the heading of aircraft B remains unchanged. The col-
umn vector on the right shows the binary decision for this
sample. Here “0” means the decision is not able to resolve
the conflict whereas “1” means it can.
techniques to augment the data. For example, rotat-
ing a whole scenario does not change the decision;
we also change speed considering different values to
create more samples. Each scenario is split in two
parts in such a way that the time slot for one is at 0
second, 10 seconds, 20 seconds, up to 5 minutes. In
the same way, the other one is for 5 seconds, 15 sec-
onds, 25 seconds, up to 5 minutes which results in a
new scenario.
It is not possible to record voice commands in
the simulator, we thus use text commands to simu-
late the ATCOs immediate orders. We have gener-
ated 1,516 sample scenarios and the corresponding
valid commands to resolve them. The samples can
be categorized based on the number of solutions they
have: [288, 2], [288, 3], [300, 4], [372, 5], and [6,
268] where the first value of each pair is the num-
ber of samples and the second one is the number of
solutions. The distribution of the samples in each
category is almost balance.The complete data set is
freely accessible online at: https://independent.
academia.edu/MDSIDDIQURRAHMAN9.
4 CLASSIFICATION MODEL
The problem of aircraft conflicts can be considered as
(a) a binary classification problem where the classifier
decides whether the conflict is solvable or not, (b) a
multi-class classification problem where the classifier
selects only the best one from multiple solutions, and
(c) a multi-label classification where the selection of
solutions will be one or more.
Figure 2: CRMLnet: Conflict resolution multi-label clas-
sification neural network model. There are 271 nodes in
both the input layer and the hidden layer while the output
layer has 12 nodes. Each output node individually provides
binary output of 12 heading angles.
In this research, we consider the conflict resolu-
tion problem as a multi-label classification because
there can be more than one solution to a conflict sce-
nario. For instance, in Figure 1, the possible solutions
are 15 degrees, 20 degrees, 25 degrees, and 30 de-
grees in Turn Left aircraft A. The multi-label result is
also more applicable in real life because a controller
will have multiple alternative solutions in hand where
it will be much easier to avoid risk. S/he can take one
of the solutions thinking of the other aircraft’s, which
are not involved in the conflict, position to avoid ad-
ditional future conflicts.
According to Tsoumakas and Katakis, it is pos-
sible to make one or more single-label classification
problems from a multi-label classification problem by
making some problem transformations (Tsoumakas
and Katakis, 2007). An individual single-label clas-
sification can be used for every single-label. We have
applied a multi-label classification using a single ar-
chitecture based on a neural network as well as multi-
ple single-label algorithms to compare with (see Sec-
tion 6). There is no well-defined neural network ar-
chitecture to tackle this task. Each neural network-
based model can be distinguished based on a combi-
nation of hyper-parameters; it behaves differently for
different data. We have tuned the hyper-parameters
to properly solve the task. Section 6 discusses more
about it. The following points are considered which
have not previously been covered in the literature:
(a) The input layer of the model takes 5-minute of
trajectory parameters of all the involved aircraft.
(b) Outputs use a separate sigmoid activation function
for binary classification.
(c) This is the first model in the field of aircraft con-
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
406

flict resolution that provides multiple output for a
single conflict.
(He and Xia, 2018) showed that a single network
can perform better for multi-label classification than
multiple individual networks for classifying emotions
from texts. In a single network, all neurons are in-
terconnected to each other, thus, all output decisions
are based on sharing information. On the other hand,
(Baker and Korhonen, 2017) mentioned two disad-
vantages of using separate binary classifiers for multi-
label classification: first, it is assumed that class-
labels are independent, although this is not happen-
ing in all cases; second, it is relatively expensive to
compute because the classifiers are computing sepa-
rately while using the same input. We use a multi-
label classification based on neural network that we
call CRMLnet. Figure 2 depicts our CRMLnet model.
Since we store 5-minutes (5 × 60 seconds = 300
seconds) of trajectory following a 10-second change
for each aircraft, we have the same parameters at each
10-seconds but the values change with respect to time.
This means we store the features repeatedly for 30
(300 seconds ÷ 10 seconds = 30) times with differ-
ent values. The angle (α) between two planes remains
unchanged. Thus, we have 9 input features that are re-
peated 30 times every 10-seconds: time, latitude (air-
craft A), longitude (aircraft A), altitude (aircraft A),
heading (aircraft A), latitude (aircraft B), longitude
(aircraft B), altitude (aircraft B), heading (aircraft B).
Overall, we have 271 (1 (angle) + 9× 30 (repeated pa-
rameters) = 271) total input features. For that reason,
the input layer of our neural network model is com-
posed of 271 nodes.
Additional hidden layers are needed, specifically
when the problem dataset is not linearly separable.
For example, Yanling et al. in (Yanling et al., 2002)
showed that it is not possible to solve a logical
XOR problem using a regular single-layer neural net-
work. However, in CRMLnet, we limited ourselves
to one hidden layer to avoid increases the loss and
decreases the accuracy. Indeed, more hidden layers
are more likely to increase overfitting than to increase
learning ability because of the large number of neu-
rons(Panchal et al., 2011). The number of nodes in
the hidden layer is equal to the number of input layers.
The output layer contains 12 nodes for 12 heading in
Figure 1. We used Rectified Linear Unit (ReLU) ac-
tivation function at the hidden layer to avoid the neg-
ative values and make the model training fast. Also,
we used a sigmoid activation function for each output
neuron for individual binary classification.
5 PERFORMANCE EVALUATION
We evaluated the CRMLnet model and compared it
with other multi-label architectures using: Support
Vector Machine (SVM), K-Nearest Neighbor Classi-
fier (K-nearest), and Logistic Regression (LR). The
evaluation is based on the simulated dataset presented
in Section 3. With regard to the sampling method,
we used both k-fold cross-validation (k = 10) (Kohavi
et al., 1995) and independent test sets where the total
dataset was divided into three subsets (60% for train-
ing, 20% for validation, and 20% for testing). To nor-
malize the data before applying the machine learning
model, we also perform a standard scaling method.
We use usual performance metrics: accuracy (Acc),
area under receiver operating characteristic curve (au-
ROC), area under precision-recall curve (auPR), F
1
score, Sensitivity (S
n
), Specificity (S
p
), and Mathew’s
Correlation Coefficient (MCC). We focus more on F
1
(Eq. 1) score and MCC (Eq. 2). F
1
-Score is the har-
monic mean of precision (p) and recall (r), the latter
is also known as sensitivity (S
n
). MCC scores range
from -1 to 1, where 1 means all the samples are cor-
rectly classified and -1 means no sample is classified
correctly.
F
1
= 2 ·
precision · recall
precision + recall
(1)
where precision =
T P
T P +FP
and recall =
T P
T P +FN
MCC =
(T P × T N) − (FP × FN)
p
(T P +FP)(T P +FN)(TN + FP)(T N + FN)
(2)
Here, T P is the total number of correctly classified
positive examples, T N is the total number of cor-
rectly classified negative examples, FP is for incor-
rectly classified positive examples, and FN for incor-
rectly classified negative examples.
6 RESULTS AND DISCUSSION
The performance of a machine learning model highly
depends on the selection of its different hyper-
parameters. On the other hand, selecting hyper-
parameters is also quite difficult because of calcu-
lating the permutations of the parameters. Random
Search (Bergstra and Bengio, 2012) is one of the pop-
ular and widely used algorithms to find the most in-
fluential parameters. We applied it on our CRML-
net model to optimize the learning rate, the number
of hidden layer, the number of nodes in each hid-
den layer, optimizer, etc. As we discussed earlier,
Multi-label Classification of Aircraft Heading Changes using Neural Network to Resolve Conflicts
407

in addition to the CRMLnet, we used three more bi-
nary classifier-based multi-label classification mod-
els: SVM, K-nearest, and LR, for which we have se-
lected hyper-parameters.
Input Layer Output Layer
Turn Left 5
0
Turn Left 10
0
Turn Left 15
0
Turn Right 30
0
X
1
X
2
X
3
X
4
X
5
X
6
X
271
CF
1
CF
2
CF
3
CF
12
1
0
0
1
Trajectory of
each conflict
scenario
Figure 3: Multi-label classification using individual clas-
sifier for each class label. All nodes on the left are input
nodes. CF
1
, CF
2
, ..., CF
12
are the output nodes and these
can be replaced by any binary classifier.
Figure 4 (a) and (b) plot the train and test loss and
accuracy for 10-fold cross-validation while Figure 4
(c) and (d) show the train and validation loss and ac-
curacy for independent test set of CRMLnet model.
We see the CRMLnet model is the best up to 100
epochs. Here, 1 epoch means the complete forward
and backward pass of input features during training.
Figure 4 shows that the loss and accuracy are almost
the same during training and testing. This means that
up to 100 epochs our model does not overfit; no vari-
ance problem occurs either.
The average validation loss (test loss in this case)
in all cases is around 0.05, which is low. The lower
loss a model has, the better its performance. Accuracy
of our CRMLnet model is around 98.72% for 10-fold
cross-validation (designated as CRMLnet
cv
, see Ta-
ble 1); it is around 97.79% for the independent test set
(designated as CRMLnet
ind
, see Table 1). This means
the performance in both cases is generalized while 10-
fold cross validation is better than the independent
test set. In addition to accuracy, we measured au-
ROC, auPR, S
p
, S
n
, MCC, and F
1
score of both cross-
validation and the independent test set. Table 1 shows
the measurements of both 10-fold cross-validation
(CRMLnet
cv
) and independent test set (CRMLnet
ind
).
Figure 3 shows a general architectural view of
a multi-label classification model using a single-
label classifier where all the CF(CF
1
, CF
2
, ..., CF
12
)
can be replaced by any of one single-label classi-
fier (SVM, LR, or K-nearest). We designed three
different architectures for SVM, LR, and K-nearest
(designated as MSVM, MLR, and MK-nearest) and
applied them on the same dataset using both 10-
fold cross-validation and independent test set. Fi-
nally, all the results of the different models are rep-
resented in Table 1 for cross-validation sequentially
as follows: CRMLnet
cv
, MSVM
cv
, MLR
cv
, and MK-
nearest
cv
. While in the case of independent test set, it
is as follows: CRMLnet
ind
, MSVM
ind
, MLR
ind
, and
MK-nearest
ind
. The results in Table 1 show that our
CRMLnet model for both cross-validation and inde-
pendent test set is much better than the other models
based on a single-label classifier. Although numerical
results are often important, many complex things are
easier to understand if they are visually presented. In
Figure 5, we represent the ROC curve of individual
class-label (twelve heading directions from Figure 1)
for all the methods with 10-fold cross-validation: (a)
Neural Network-based model CRMLnet, (b) Multi-
ple Support Vector Machine based model MSVM, (c)
Multiple K-Nearest Neighbor classifier based model
MK-nearest, and (d) Multiple Logistic Regression
based model MLR. We have twelve distinct class-
labels (horizontal heading direction - see Figure 1)
and for each class-label, we applied a single-label
binary classifier (single output node for CRMLnet)
to predict whether the corresponding heading change
solves the conflict or not. Any of the individual clas-
sifiers use the same input features. Figure 5 shows
that there are high fluctuations in ROC for the other
models (MSVM
cv
, MLR
cv
, and MK-nearest
cv
) while
it is not the case for the CRMLnet
cv
model. We
also have estimated the error of CRMLnet
cv
: 0.044
and CRMLnet
ind
: 0.063. We see cross-validation
(CRMLnet
cv
) has less error than independent test sets
(CRMLnet
ind
). The training of the model using cross-
validation is better than independent test sets. So, in
all cases, CRMLnet performs much better than other
models using a separate single label classifier.
We cannot compare our model with models from
the literature because the data preparation is differ-
ent. The annotations for each data sample (multi-label
class) are also very different from other (binary or
multi-class) ones because we tackle the problem of
conflict resolution in a different way. We discussed in
Section 2 that the most similar work to ours is Kim
et al.’ (Kim et al., 2016) where their dataset contains
category-based resolutions such as vertical, horizon-
tal, and speed control. On contrary, our class label is
heading angle modification such as right-heading or
left-heading with one or more specific degree angles.
7 CONCLUSION
The purpose of this research is to develop a model
that suggests different heading directions to air traf-
fic controllers to avoid aircraft conflicts. The neu-
ral network we developed, CRMLnet, is a multi-label
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
408
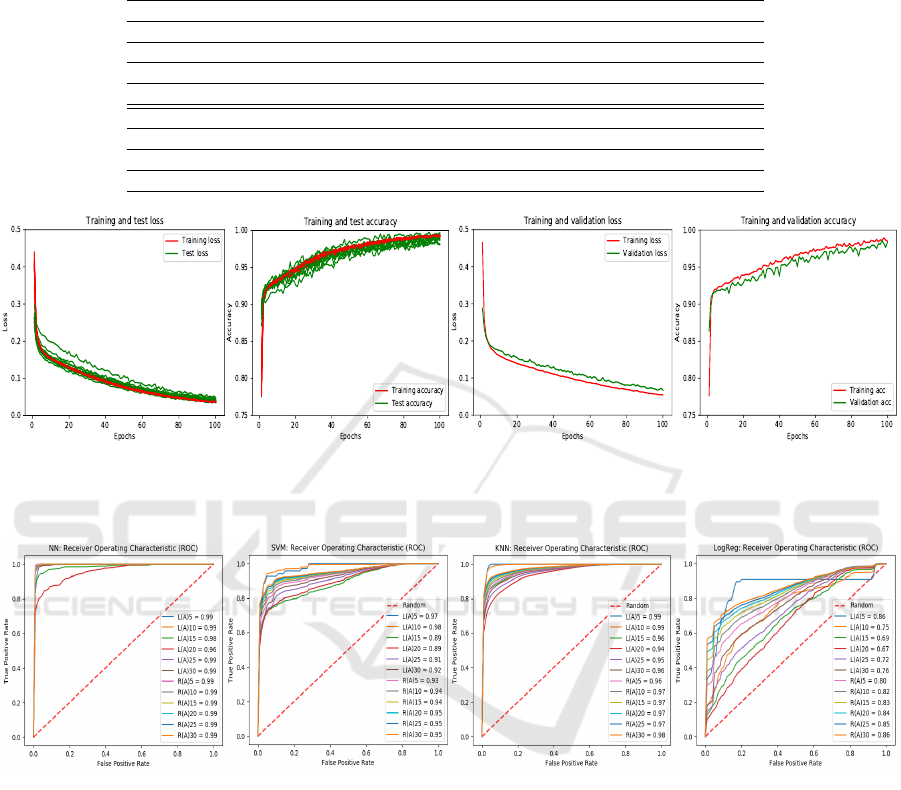
Table 1: CRMLnet is much better than the other classifiers when using cross-validation (CRMLnet
cv
) and independent test
set (CRMLnet
ind
). Here, the 1
st
column is the classifier. The next columns are : Accuracy (Acc), area under receiver
operating characteristic curve (auROC), area under precision-recall curve (auPR), Specificity(S
p
), Sensitivity (S
n
), Mathew’s
Correlation Coefficient (MCC), and F
1
score.
Classifiers Acc auROC auPR S
p
S
n
MCC F
1
CRMLnet
cv
98.72% 0.999 0.998 99.11% 97.94% 0.971 0.981
MSVM
cv
91.66% 0.953 0.934 94.24% 86.54% 0.812 0.793
MK-nearest
cv
95.45% 0.979 0.958 96.68% 93.01% 0.898 0.921
MLR
cv
90.96% 0.863 0.818 93.29% 86.36% 0.797 0.785
CRMLnet
ind
97.79% 0.997 0.995 97.93% 97.36% 0.952 0.968
MSVM
ind
91.47% 0.944 0.899 94.30% 85.89% 0.808 0.768
MK-nearest
ind
93.00% 0.931 0.895 95.14% 88.78% 0.843 0.884
MLR
ind
90.97% 0.842 0.789 93.63% 85.73% 0.797 0.785
(a) CRMLnet
cv
loss (b) CRMLnet
cv
accuracy (c) CRMLnet
ind
loss (d) CRMLnet
ind
accuracy
Figure 4: Up to 100 epochs, CRMLnet does not over-fit when considering both cross-validation and independent test set. The
horizontal axis represents the number epoch. The vertical axis in (a) & (c) represents the loss while in (b) & (d) for accuracy.
(a) CRMLnet (b) MSVM (c) MK-nearest (d) MLR
Figure 5: CRMLnet model is much better in terms of ROC compared to other models. Each color represents an individual
heading change from Figure 1.
classification model which identifies multiple resolu-
tions for a single conflict scenario. In addition to the
classification model, we also developed a simulated
dataset in a 5-minute window manner. This data set is
made available to the research community. We iden-
tify as many heading directions as possible to solve
a single conflict within a specific horizontal direction
range (left 30
0
to right 30
0
). We evaluated our model
using 10-fold cross-validation (CRMLnet
cv
) and in-
dependent test set validation (CRMLnet
ind
). We
also compare our CRMLnet model with other multi-
label classification models (MSVM, MLR, and MK-
nearest) and show that CRMLnet got much better per-
formances. Our CRMLnet model obtained 98.72%
of accuracy when using 10-fold cross-validation and
97.79% when using independent test set. The other
models obtained the following accuracy for 10-fold
cross-validation: 91.66% for MSVM
cv
, 95.45% for
MK-nearest
cv
and 90.96% for MLR
cv
while for in-
dependent test set: 91.47% for MSVM
ind
, 93.00%
for MK-nearest
ind
, and 90.97% for MLR
ind
. Through
this research, we show that models can learn the con-
flict environment. Also, we show that it is possible to
make conflict resolution without any prepossess (fea-
ture extraction) of this data.
Multi-label Classification of Aircraft Heading Changes using Neural Network to Resolve Conflicts
409

REFERENCES
Agogino, A. K. and Tumer, K. (2012). A multiagent ap-
proach to managing air traffic flow. Autonomous
Agents and Multi-Agent Systems, 24(1):1–25.
Alam, S., Shafi, K., Abbass, H. A., and Barlow, M. (2009).
An ensemble approach for conflict detection in free
flight by data mining. Transportation research part
C: emerging technologies, 17(3):298–317.
Alonso-Ayuso, A., Escudero, L. F., Olaso, P., and Pizarro,
C. (2013). Conflict avoidance: 0-1 linear models for
conflict detection & resolution. Top, 21(3):485–504.
Baker, S. and Korhonen, A.-L. (2017). Initializing neural
networks for hierarchical multi-label text classifica-
tion. Association for Computational Linguistics.
Bayen, A., Grieder, P., Meyer, G., and Tomlin, C. J. (2005).
Langrangian delay predictive model for sector-based
air traffic flow. Journal of guidance, control, and dy-
namics, 28(5):1015–1026.
Bergstra, J. and Bengio, Y. (2012). Random search for
hyper-parameter optimization. The Journal of Ma-
chine Learning Research, 13(1):281–305.
Brittain, M. and Wei, P. (2018). Autonomous aircraft se-
quencing and separation with hierarchical deep rein-
forcement learning. In Proceedings of the Interna-
tional Conference for Research in Air Transportation.
Eby, M. S. and Kelly, W. E. (1999). Free flight separa-
tion assurance using distributed algorithms. In 1999
IEEE Aerospace Conference. Proceedings (Cat. No.
99TH8403), volume 2, pages 429–441. IEEE.
Erzberger, H., Paielli, R. A., Isaacson, D. R., and Eshow,
M. M. (1997). Conflict detection and resolution in the
presence of prediction error. In 1st USA/Europe Air
Traffic Management R&D Seminar, Saclay, France,
pages 17–20. Citeseer.
Gardner, M. W. and Dorling, S. (1998). Artificial neural
networks (the multilayer perceptron)—a review of ap-
plications in the atmospheric sciences. Atmospheric
environment, 32(14-15):2627–2636.
He, H. and Xia, R. (2018). Joint binary neural network
for multi-label learning with applications to emotion
classification. In CCF International Conference on
Natural Language Processing and Chinese Comput-
ing, pages 250–259. Springer.
Hoekstra, J. M. and Ellerbroek, J. (2016). Bluesky atc
simulator project: an open data and open source ap-
proach. In Proceedings of the 7th International Con-
ference on Research in Air Transportation, pages 1–8.
FAA/Eurocontrol USA/Europe.
Jiang, X.-r., Wen, X.-x., Wu, M.-g., Wang, Z.-k., and Qiu,
X. (2018). A svm approach of aircraft conflict detec-
tion in free flight. J. of Advanced Transportation.
Kim, K., Hwang, I., and Yang, B.-J. (2016). Classifica-
tion of conflict resolution methods using data-mining
techniques. In 16th AIAA Aviation Technology, Inte-
gration, and Operations Conference, page 4075.
Kohavi, R. et al. (1995). A study of cross-validation and
bootstrap for accuracy estimation and model selec-
tion. In Ijcai, volume 14, pages 1137–1145. Montreal,
Canada.
Kuchar, J. K. and Yang, L. C. (2000). A review of
conflict detection and resolution modeling methods.
IEEE Transactions on intelligent transportation sys-
tems, 1(4):179–189.
Lapasset, L., Rahman, M. S., and Mothe, J. (2020). Solv-
ing aircraft conflicts: data resources. In 1st Interna-
tional Conference on Cognitive Aircraft Systems (IC-
CAS 2020), page 76.
Nanduri, A. and Sherry, L. (2016). Anomaly detection
in aircraft data using recurrent neural networks (rnn).
In 2016 Integrated Communications Navigation and
Surveillance (ICNS), pages 5C2–1. IEEE.
Paielli, R. A. and Erzberger, H. (1997). Conflict probability
estimation for free flight. Journal of Guidance, Con-
trol, and Dynamics, 20(3):588–596.
Panchal, G., Ganatra, A., Kosta, Y., and Panchal, D. (2011).
Behaviour analysis of multilayer perceptrons with
multiple hidden neurons and hidden layers. Interna-
tional Journal of Computer Theory and Engineering,
3(2):332–337.
Pavlinovi
´
c, M., Boras, D., and Franceti
´
c, I. (2013). First
steps in designing air traffic control communication
language technology system-compiling spoken corpus
of radiotelephony communication. International Jour-
nal of Computers and Communications, 7(3):73.
Pham, D.-T., Tran, N. P., Alam, S., Duong, V., and Dela-
haye, D. (2019a). A machine learning approach for
conflict resolution in dense traffic scenarios with un-
certainties.
Pham, D.-T., Trant, N. P., Goh, S. K., Alam, S., and
Duong, V. (2019b). Reinforcement learning for two-
aircraft conflict resolution in the presence of uncer-
tainty. In 2019 IEEE-RIVF International Confer-
ence on Computing and Communication Technologies
(RIVF), pages 1–6. IEEE.
Prandini, M., Hu, J., Lygeros, J., and Sastry, S. (2000).
A probabilistic approach to aircraft conflict detection.
IEEE Transactions on intelligent transportation sys-
tems, 1(4):199–220.
Prandini, M., Lygeros, J., Nilim, A., and Sastry, S. (1999).
A probabilistic framework for aircraft conflict detec-
tion. In Guidance, Navigation, and Control Confer-
ence and Exhibit, page 4144.
Rahman, M. S. (2020). Supervised machine learning model
to help controllers solving aircraft conflicts. In AD-
BIS, TPDL and EDA 2020 Common Workshops and
Doctoral Consortium, pages 355–361. Springer.
Sch
¨
afer, M., Strohmeier, M., Lenders, V., Martinovic, I.,
and Wilhelm, M. (2014). Bringing up opensky: A
large-scale ads-b sensor network for research. In Pro-
ceedings of the 13th international symposium on In-
formation processing in sensor networks, pages 83–
94. IEEE Press.
Srinivasamurthy, A., Motlicek, P., Singh, M., Oualil, Y.,
Kleinert, M., Ehr, H., and Helmke, H. (2018). It-
erative learning of speech recognition models for air
traffic control. In Interspeech, pages 3519–3523.
Tsoumakas, G. and Katakis, I. (2007). Multi-label classi-
fication: An overview. International Journal of Data
Warehousing and Mining (IJDWM), 3(3):1–13.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
410

Wandelt, S. and Sun, X. (2014). Efficient compression of
4d-trajectory data in air traffic management. IEEE
Transactions on Intelligent Transportation Systems,
16(2):844–853.
Wang, Z., Li, H., Wang, J., and Shen, F. (2019). Deep re-
inforcement learning based conflict detection and res-
olution in air traffic control. IET Intelligent Transport
Systems, 13(6):1041–1047.
Yanling, Z., Bimin, D., and Zhanrong, W. (2002). Analy-
sis and study of perceptron to solve xor problem. In
The 2nd International Workshop on Autonomous De-
centralized System, 2002., pages 168–173. IEEE.
Multi-label Classification of Aircraft Heading Changes using Neural Network to Resolve Conflicts
411
