
Prognostic-based Maintenance Optimization in Complex Systems with
Resource Limitation Constraints
Junkai He
1 a
, Miguel F. Anjos
2 b
, Makhlouf Hadji
1 c
and Selma Khebbache
1 d
1
Technological Research Institute SystemX, 8 Avenue de la Vauve, 91120 Palaiseau, France
2
School of Mathematics, University of Edinburgh, Peter Guthrie Tait Road, Edinburgh EH9 3FD, Scotland, U.K.
Keywords:
Predictive Maintenance, Optimization, Complex System, Prognostic Information, Remaining Useful Life,
Resource Limitation.
Abstract:
This paper is concerned with prognostic information for maintenance optimization in complex systems. At
each stage of such a system, we consider redundant components used as backup to guarantee the system’s
availability. The Remaining Useful Life (RUL/prognostic information) of components is used to evaluate
each component’s redundancy. We address RUL-based maintenance optimization under resource limitation
to ensure the availability of the system such that production demands can be satisfied in a given maintenance
planning horizon. We propose a mixed-integer linear programming approach to minimize the overall cost. Our
numerical results on test instances show the efficiency of the proposed approach to attain optimal solutions.
1 INTRODUCTION
Industrial systems generally degrade due to different
factors. This degradation may eventually cause seri-
ous economic problems for companies. Maintenance
is a widely recognized essential element in asset man-
agement to reduce the speed of degradation (De Jonge
and Scarf, 2020). However, traditional maintenance
decisions for single-component systems are not suit-
able for contemporary complex systems. Complex
systems are systems that are difficult to categorize
as series, parallel, or k/n networks. They commonly
consist of multiple components with various interac-
tions (Zhu et al., 2021). Industrial and academic re-
searchers have thus been focusing on proposing ef-
fective maintenance optimization strategies for such
complex systems.
In industrial applications, maintenance is mainly
classified as Corrective Maintenance (CM) and Pre-
ventive Maintenance (PM). CM is carried out when
a component has broken down, while PM happens in
advance to reduce the degradation speed and avoid a
sudden failure. In addition, these two maintenance
types are often considered under resource constraints
a
https://orcid.org/0000-0003-0918-876X
b
https://orcid.org/0000-0002-8258-9116
c
https://orcid.org/0000-0003-1048-753X
d
https://orcid.org/0000-0001-5248-2548
that represent the limited number of available techni-
cians, repairmen, apparatus, etc. If and only if enough
resource is provided, the maintenance can be con-
ducted and accomplished.
To make decisions about maintenance policies, an
interesting approach consists of soliciting the prog-
nostic information of components, such as the Re-
maining Useful Life (RUL) (Camci et al., 2019). The
definition of component’s RUL is the currently re-
maining time of operation before it fails. The focus
of our work is on using the obtained component-level
RUL information to plan PM optimization in order to
achieve system-level availability in complex systems.
We consider generic complex systems with a se-
ries of stages and each stage contains multiple redun-
dant components (see Figure 1). The same type of
structure has been considered in multi-process indus-
tries, such as gas production (Ye et al., 2019; Xenos
et al., 2016). The overall aim consists in coordinating
the operations in different stages and provides global
maintenance decisions such that the system can oper-
ate continuously during the planning horizon to sat-
isfy client demands. This approach can be seen as an
integration of maintenance and production.
In summary, we address a RUL-Based Mainte-
nance Optimization (RBMO) problem in complex
systems with resource limitation constraints (RBMO-
RL). The objective is to minimize the total cost over
a planning optimization horizon, including mainte-
He, J., Anjos, M., Hadji, M. and Khebbache, S.
Prognostic-based Maintenance Optimization in Complex Systems with Resource Limitation Constraints.
DOI: 10.5220/0010829100003117
In Proceedings of the 11th International Conference on Operations Research and Enterprise Systems (ICORES 2022), pages 169-176
ISBN: 978-989-758-548-7; ISSN: 2184-4372
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
169

Figure 1: Architecture of the studied complex systems.
nance cost, system-failure cost, inventory expense,
and a penalty for non-met production. The contribu-
tions in our work are as follows:
• A novel RBMO-RL problem to minimize the total
cost in complex systems.
• A Mixed-Integer Linear Programming (MILP)
formulation of this problem.
The remaining of this paper is organized as fol-
lows. In Section 2, we review related literature to
highlight and position our contributions. In Section 3,
we mathematically formulate the RBMO and RBMO-
RL problems and provide MILP models. Numerical
tests are conducted and the results are reported and
analyzed in Section 4. Section 5 is dedicated to the
conclusion and future work.
2 LITERATURE REVIEW
2.1 Maintenance in Complex Systems
We review the main contributions in the maintenance
literature concerned with RUL usage, system avail-
ability, and integrated problems.
RUL is an essential index that reflects the status of
a component. In general, it can be either obtained by
defining the time length from the current time to the
end-of-life. Or more frequently, it is defined as the
time left before the health condition reaches a warn-
ing threshold (Si et al., 2011). More than 270 pa-
pers have studied RUL prediction (Lei et al., 2018).
We focus on RUL usage in our work and distinguish
three branches in the literature. (i) RUL-based in-
spection: Do et al. (2015) used RUL information for
deciding the time point for the next coming inspec-
tion. (ii) RUL-based maintenance strategies: Chen
et al. (2019) proposed different maintenance actions
via combinations of degradation and RUL. (iii) RUL-
based constraints: Camci et al. (2019) used prognos-
tic information to formulate probability constraints
related to the failure rate of a component.
For describing system-level availability by com-
ponent condition, Wu and Castro (2020) proposed a
linear combination of the degradation processes of
several components. If this value exceeded a given
threshold, PM was performed. Lei and Sandborn
(2018) proposed a prognostic health analysis to pre-
dict the RUL of wind turbines. The authors assumed
that turbines were dependent and system availability
relied on the minimum RUL among them. Dong et
al. (2020) assumed that normal-distributed shocks oc-
curred independently and described system reliability
by conditioning on the numbers of arrived shocks.
Integrated problems combine maintenance in
complex systems with other scopes to make global
decisions. One of the mainstream approaches is to si-
multaneously take maintenance and resource into ac-
count, such as spare part ordering. Camci (2009) pro-
posed CM and spare part inventory strategies using
the given prognostic information to minimize the fail-
ure risk. A genetic algorithm was proposed to solve
the problem and computational results were com-
pared with the ones via PM strategy. Numerous pa-
pers have considered spare part ordering, see the in-
vited review (De Jonge and Scarf, 2020). The integra-
tion of maintenance and production is also an impor-
tant branch because maintenance activities eventually
impact production. Bahria et al. (2019) developed
an integrated approach to control production, main-
tenance, and quality for manufacturing. Appropri-
ate thresholds for conducting maintenance were dis-
cussed to guarantee the robustness of the system.
From the literature, we observe a lack of RUL us-
age and mathematical modeling via RUL-based con-
straints. Moreover, the influence of individual RUL
information on complex systems is seldom discussed.
Hence, and to the best of our knowledge, the inte-
grated optimization of maintenance and production
in series-structured systems with backup components
and resource limitation has not been studied. In our
work, we address maintenance optimization for com-
plex systems considering standby components and re-
source limitation. The optimization aims to guaran-
tee the continuous operation of the system. This is
achieved by integrating component-level RUL infor-
mation in the formulation.
2.2 Maintenance Optimization Methods
Many solution methods based on optimization for
maintenance problems in complex systems have been
proposed. In the following, we discuss some of the
related and recent references and clearly situate our
contribution compared to these approaches.
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
170
In the mentioned Camci (2009) and Xiao et al.
(2016), genetic algorithms were proposed to solve the
problems. Rivera-G
´
omez et al. (2020) presented a
continuous production system with quality deteriora-
tion. The objective was to reduce the occurred cost
with a quality constraint. A non-linear programming
model was formulated for the problem. Zhou et al.
(2019) proposed an optimal PM policy with the pur-
pose to get operational parameters for a production
line. A non-linear model and a heuristic were de-
signed to minimize the cost and guarantee the oper-
ating speed. Compared to the widely used non-linear
formulation and (meta-) heuristics, linear formulation
for maintenance optimization is very limited. In this
research, we formulate MILP models for the consid-
ered RBMO and RBMO-RL problems, with the pur-
pose to provide optimal maintenance decisions.
3 PROBLEM DESCRIPTION AND
FORMULATION
3.1 RBMO Problem Description
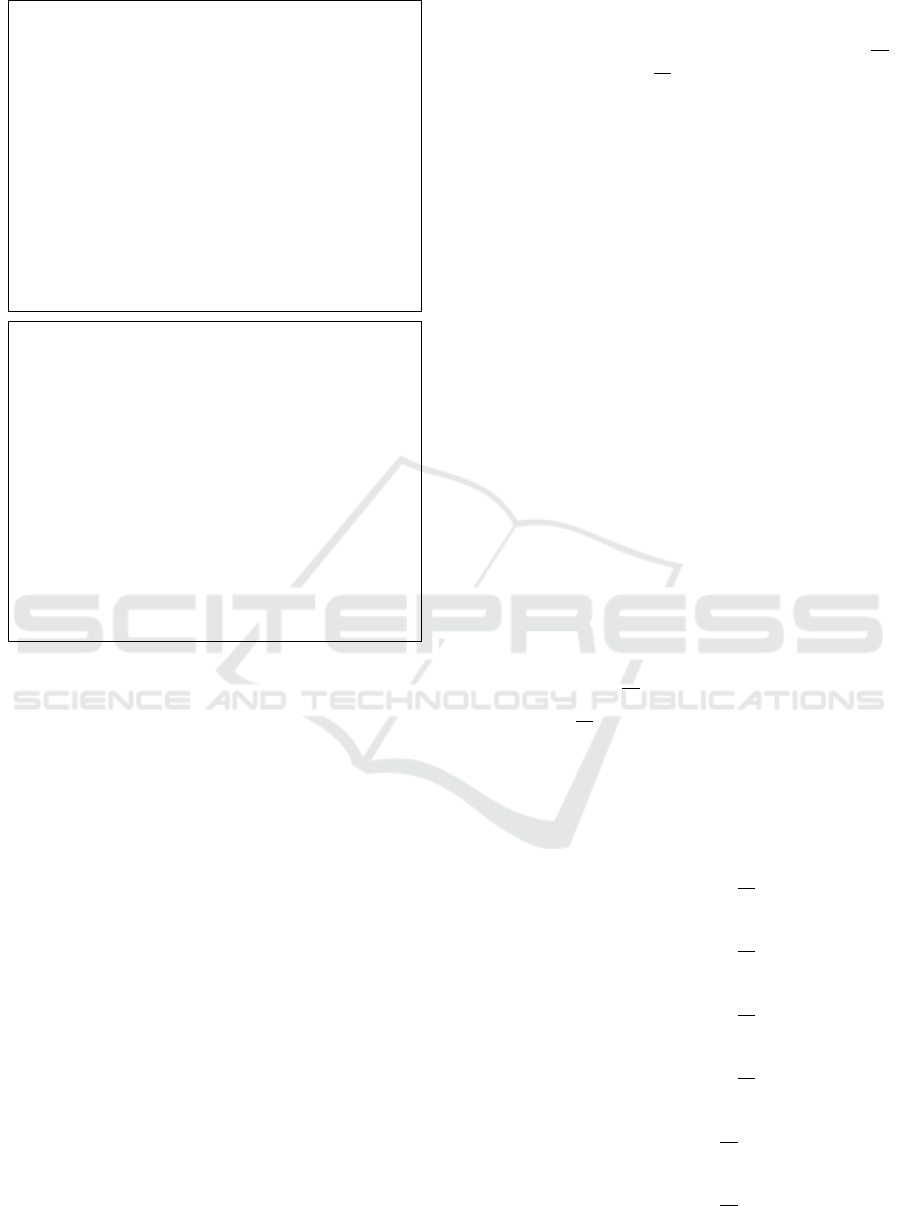
The architecture of the considered complex systems
in Figure 2 contains |K| processing stages where K
denotes the stage set. Stage k (∈ K) is configured with
|J
k
| components where J
k
represents the component
set in stage k. Each component may have three states:
working (in green), standby (in grey), and mainte-
nance (in black), respectively. We assume that each
component is repairable, and that maintaining it does
not affect the operation of a stage if there exist any
available standby component. The planning horizon
contains |T | periods (weeks), where T is the period
set. The purpose is to satisfy the demands of |I| clients
during this horizon, where I is the client set.
Figure 2: Schematic diagram of the complex system.
We now describe the three main sets of constraints
in our model in the following.
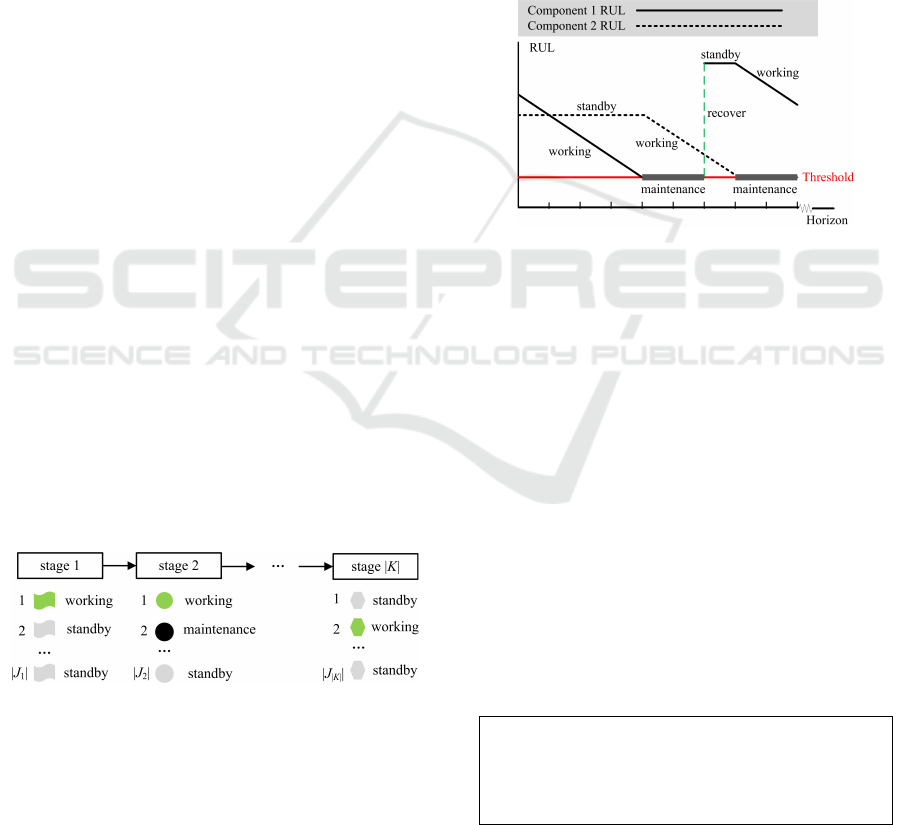
Evolution of RUL over time. The model keeps
track of the RUL of components over the optimiza-
tion horizon. It is assumed that the prognostic RUL
of component j in stage k follows a linear function
b
k, j
− a
k, j
· t, where a
k, j
and b
k, j
respectively denote
the coefficient and constant. Note that RUL can be al-
ternatively described using values, quantiles, or prob-
abilities. We choose the first option in this research,
and leave the other ones for future work. As illus-
trated in Figure 3, for component j in stage k, if it is
operating during a period, its RUL decreases in value
by a
k, j
. If it is standby, its RUL will not change. If it
is under maintenance, its RUL will stay at the thresh-
old γ
k
until maintenance is carried out. Note that any
component reaching the corresponding threshold can
no longer operate and needs to be maintained. After
maintenance, its RUL is restored to b
k, j
. The initial
RUL of each component is given as o
k, j
. We assume
that threshold γ
k
is provided by experts. Hence, opti-
mizing γ
k
is outside the scope of this paper.
Figure 3: Evolution of RUL.
System Availability. The operation of a stage re-
quires that at least one component (at the same stage)
is working. If not, it eventually results in the unavail-
ability of the system because it operates if and only if
all stages are working.
Production Integration. The system has a produc-
tion of qua
t
in period t to satisfy demands d
t
i
. How-
ever, its production capacity for each period is lim-
ited by Q. If the system cannot work during a period,
there is no production and it may cause some produc-
tion loss. To avoid demand unmet, we allow some
possible stocks in preparation (if needed) to serve for
subsequent client demands.
3.2 RBMO Formulation
Before introducing our mathematical model for the
RBMO problem, and for sake of clarity, we summa-
rize the notations that will be used in our formulation.
Problem sets
- I: set of clients;
- K: set of stages in the system;
- J
k
: set of components in stage k;
- T : set of periods;
Prognostic-based Maintenance Optimization in Complex Systems with Resource Limitation Constraints
171
Parameters:
- cap: production capacity of the system each period;
- a
k, j
: coefficient in the RUL function of component j
in stage k;
- b
k, j
: constant in the RUL function of component j in
stage k; then the RUL function can be established by
b
k, j
− a
k, j
·t;
- o
k, j
: original RUL of component j in stage k;
- γ
k
: RUL threshold of components in stage k;
- p
k
: maintenance duration of components in stage k;
- d
t
i
: demand of client i in period t;
- c
M
: unit maintenance cost;
- c
FL
: unit failure cost;
- c
Inv
: unit inventory cost;
- c
Loss
: unit production-loss cost.
Decision variables:
- x
t
k, j
: binary variable, equals to 1 if component j in
stage k needs to be maintained in period t, 0 otherwise;
- y
t
k, j
: binary variable, equals to 1 if component j in
stage k is working in period t, 0 otherwise;
- R
t
k, j
: RUL of component j in stage k in period t;
- ST
t
k
: binary variable, equals to 1 if stage k is working
in period t, 0 otherwise;
- SY
t
: binary variable, equals to 1 if the system is work-
ing in period t, 0 otherwise;
- qua
t
: production quantity in period t;
- inv
t
: inventory in period t. Note that there is no in-
ventory at the beginning of the horizon;
- z
t
: binary variable, equals to 1 if the inventory is pos-
itive in period t, 0 otherwise.
The MILP model for the RBMO problem is for-
mulated and noted by (M1). We consider the objec-
tive function (1) as the sum of four terms:
• C
M
denotes the total maintenance cost that is cal-
culated by unit maintenance cost times the num-
ber of maintenance activities.
• C
FL
denotes the total failure cost that is computed
by unit failure cost times the number of failures.
• C
Inv
denotes the total inventory cost that is com-
puted by unit inventory cost times the amount of
inventory (if any).
• C
Loss
denotes the total production-loss cost that is
computed by unit production-loss cost times nega-
tive inventory. Here negative inventory represents
the quantity of unsatisfied demands.
(M1) : minC
M
+C
FL
+C
Inv
+C
Loss
(1)
C
M
= c
M
·
∑
k∈K
∑
j∈J
k
∑
t∈T
x
t
k, j
C
FL
= c
FL
·
∑
t∈T
(1 − SY
t
)
C
Inv
= c
Inv
·
∑
t∈T
z
t
· inv
t
C
Loss
= c
Loss
·
∑
t∈T
(1 − z
t
) · inv
t
Note that the non-linear term z
t
· inv
t
can be lin-
earized by introducing an auxiliary variable µ
t
= z
t
·
inv
t
with two additional constraints inv
t
≤ µ
t
+ M ·
(1 − z
t
) and 0 ≤ µ
t
+ M · z
t
. However, we chose to
let CPLEX handle these terms automatically (IBM).
The optimization of formula (1) is under the fol-
lowing sets of constraints:
Evolution of RUL Constraints. This constraint
group is formulated to track the RUL of components.
To be more specific, a maintenance is required when
the RUL of a component is no bigger than the cor-
responding threshold, which is guaranteed by con-
straints (2) and (3). If a component is under mainte-
nance, its unavailable time respects the maintenance
duration, which is calculated by constraints (4). Con-
straints (5) restricts that only one component can be
working in each stage if there is a need. Evolution of
RUL contains three cases: (i) if a component is main-
tained, its RUL will be restored to a given value, that
is, R
t+1
k, j
= b
k, j
if x
t
k, j
= 1. Please refer to constraints
(6) to (7); (ii) If a component is being used in a period,
its RUL will decrease respecting the given RUL func-
tion, that is, R
t+1
k, j
= R
t
k, j
−a
k, j
if x
t
k, j
= 0 and y
t
k, j
= 1,
which is calculated by constraints (8) to (9); (iii) The
RUL of standby components will not change, that is,
R
t+1
k, j
= R
t
k, j
if x
t
k, j
= 0 and y
t
k, j
= 0, which is estab-
lished by (10) to (11).
R
t
k, j
> γ
k
− M · x
t
k, j
, ∀k ∈ K, j ∈ J
k
,t ∈ T (2)
R
t
k, j
≤ γ
k
+ M · (1 − x
t
k, j
), ∀k ∈ K, j ∈ J
k
,t ∈ T (3)
∑
t
0
∈[t,t+p
k
−1]
y
t
0
k, j
≤ 1 − x
t
k, j
,
∀k ∈ K, j ∈ J
k
,t ∈ [1, |T | − p
k
+ 1] (4)
∑
j∈J
k
y
t
k, j
≤ 1, ∀k ∈ K, t ∈ T (5)
R
t+1
k, j
≥ b
k, j
− M · (1 − x
t
k, j
),
∀k ∈ K, j ∈ J
k
,t ∈ [1, |T | − 1] (6)
R
t+1
k, j
≤ b
k, j
+ M · (1 − x
t
k, j
),
∀k ∈ K, j ∈ J
k
,t ∈ [1, |T | − 1] (7)
R
t+1
k, j
≥ R
t
k, j
− a
k, j
− M · (1 − y
t
k, j
),
∀k ∈ K, j ∈ J
k
,t ∈ [1, |T | − 1] (8)
R
t+1
k, j
≤ R
t
k, j
− a
k, j
+ M · (1 − y
t
k, j
),
∀k ∈ K, j ∈ J
k
,t ∈ [1, |T | − 1] (9)
R
t+1
k, j
≥ R
t
k, j
− M · (x
t
k, j
+ y
t
k, j
),
∀k ∈ K, j ∈ J
k
,t ∈ [1, |T | − 1] (10)
R
t+1
k, j
≤ R
t
k, j
+ M · (x
t
k, j
+ y
t
k, j
),
∀k ∈ K, j ∈ J
k
,t ∈ [1, |T | − 1] (11)
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
172
System Availability Constraints. This set of valid
inequalities describes stage availability and further
system availability for each period via the compo-
nents’ RUL information. The premise that a stage
operates normally is that at least one component in
the stage is working, i.e., ∃y
t
k, j
= 1. To this end, the
availability of a stage can be described by constraints
(12). For system availability, it strictly requires that
all the stages are available, i.e., ∀ST
t
k
= 1, which is
expressed by constraints (13) and (14).
ST
t
k
≤
∑
j∈J
k
y
t
k, j
, ∀k ∈ K,t ∈ T
1
|K|
∑
k∈K
ST
t
k
≤ SY
t
+
∑
k∈K
(1 − ST
t
k
), ∀t ∈ T
ST
t
k
≥ SY
t
, ∀k ∈ K,t ∈ T
(12)
(13)
(14)
Production Integration Constraints. These con-
straints describe how system availability impacts pro-
duction and inventory. Constraints (15) provide the
upper bound of production quantity in each period
respecting system production capacity, while con-
straints (16) give the lower bound because a system
cannot produce if any one of the stages is not active.
The inventory is calculated by the sum of production
quantity and the inventory in the last period minuses
the currently total demands (constraints (17)). Note
that the inventory can be negative if the maintenance
leads to a non-working state for the system or produc-
tion capacity is surpassed. Then, constraints (18) and
(19) record that the on-hand inventory is non-negative
and negative, respectively, meaning that the inventory
is enough or not for satisfying client demands.
qua
t
≤ cap · ST
t
k
, ∀k ∈ K, t ∈ T (15)
qua
t
≥
∑
j∈J
k
y
t
k, j
, ∀k ∈ K, t ∈ T (16)
inv
t
= qua
t
+ inv
t−1
−
∑
i∈I
d
t
i
, ∀t ∈ T (17)
inv
t
≥ −M · (1 − z
t
), ∀t ∈ T (18)
inv
t
≤ M · z
t
, ∀t ∈ T (19)
Note that the initial RUL of a component is equal
to o
k, j
and there is no inventory at the beginning of
the planning horizon. The ranges of the decision vari-
ables are detailed as follows:
x
t
k, j
, y
t
k, j
, ST
t
k
, SY
t
, z
t
∈ {0, 1}, ∀k ∈ K, j ∈ J
k
,t ∈ T
R
t
k, j
, inv
t
, qua
t
∈ Z, ∀k ∈ K, j ∈ J
k
,t ∈ T
(20)
(21)
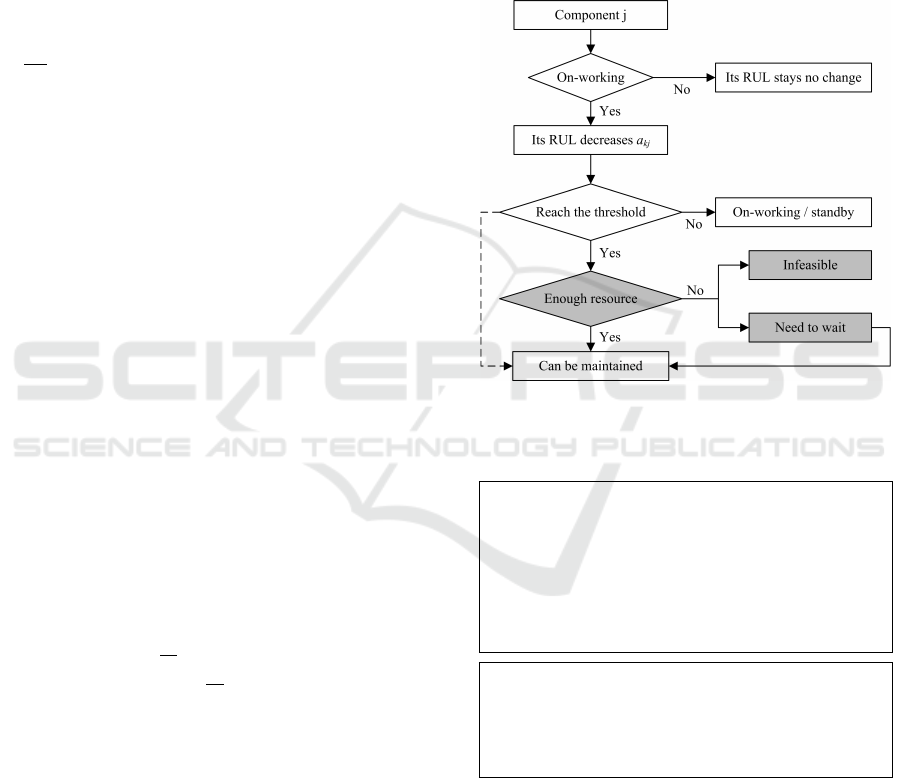
3.3 RBMO-RL Formulation
In this part, we assess the impact of resource limi-
tation constraints on maintenance optimization. As
shown in Figure 4, the main difference (grey icons)
between RBMO and RBMO-RL problems is whether
we have enough resources to do maintenance. If too
many components reach a warning condition at the
same time but resources are not enough, some of them
must wait for the maintenance. This waiting time can
be shortened or even be 0 by arranging component re-
dundancy. On the other hand, the RBMO-RL problem
can be infeasible if we cannot find available resources
during the optimization horizon.
Figure 4: Impact of resource limitation.
We now proceed to formulate the resource limita-
tion constraints mathematically.
New parameters:
- n
k
: the number of resources required to maintain a
component in stage k;
- N
t
: the number of resources available in period t;
- e
t
k
: binary parameter, equals to 1 if the components
in stage k can start to be maintained in period t, 0 oth-
erwise. If N
t
0
≥ n
k
establishes for t
0
∈ [t + p
k
− 1], a
maintenance can be started in period t.
New decision variables:
- s
t
k, j
: binary variable, equals to 1 if component j in
stage k is started to be maintained in period t;
- o
t
k, j
: binary variable, equals to 1 if component j in
stage k is being maintained in period t.
x
t
k, j
≤
∑
t
0
∈[t,|T |]
s
t
0
k, j
, ∀k ∈ K, j ∈ J
k
,t ∈ T (22)
s
t
k, j
≤ e
t
k
, ∀k ∈ K, j ∈ J
k
,t ∈ T (23)
s
t
k, j
≤ o
t
0
k, j
,
(24)
∀k ∈ K, j ∈ J
k
,t ∈ [1, |T | − p
k
+ 1],t
0
∈ [t, t + p
k
− 1]
y
t1
k, j
≤ 2 − x
t
k, j
− s
t
0
k, j
,
Prognostic-based Maintenance Optimization in Complex Systems with Resource Limitation Constraints
173

∀k ∈ K, j ∈ J
k
,t ∈ T, t
0
∈ [t, |T |],t1 ∈ [t, t
0
] (25)
y
t
k, j
≤ 1 − o
t
k, j
, ∀k ∈ K, j ∈ J
k
,t ∈ T (26)
∑
k∈K
∑
j∈J
k
n
k
· o
t
k, j
≤ N
t
, ∀t ∈ T (27)
s
t
k, j
, o
t
k, j
∈ {0, 1}, ∀k ∈ K, j ∈ J
k
,t ∈ T (28)
For resource limitation constraints, a maintenance
should start no earlier than the time when the RUL
of a component reaches the threshold, and it must
respect resource limitation, which are guaranteed by
constraints (22) and (23), respectively. Constraints
(25) provide the length of resource occupation dur-
ing maintenance. Once the RUL of a component
reaches the threshold, it cannot be used until the main-
tenance is finished. To be specific, constraints (25)
denote its unavailability during the wait while con-
straints (26) denote its unavailability during the main-
tenance. The resource limitation is verified by con-
straints (27), meaning that the total number of re-
sources for maintenance occupation must not exceed
the currently available resources. Finally, constraints
(28) provide the ranges of new variables.
We add a new term in the objective function re-
garding the earlier start time for maintenance. The
model for the RBMO-RL problem is established be-
low and noted by (M2).
(M2) : min C
M
+C
FL
+C
Inv
+C
Loss
+C
S
C
S
=
∑
k∈K
∑
j∈J
k
∑
t∈T
t · s
t
k, j
subject to : (2) − (3), (5) − (20), (22) − (28)
4 COMPUTATIONAL RESULTS
In this section, computational tests are conducted to
compare the performance of the two provided mathe-
matical models. All the tests are conducted on a com-
puter with Core I7 and 8GB RAM system. The MILP
models are solved using CPLEX 12.8 in Python 3.7.8.
4.1 Test Instances
To illustrate the differences between the two mod-
els, we set up several instances with different sizes.
We describe the size of each instance as (|I|, |K|, |T |),
where these quantities are the number of clients,
stages, and periods, respectively. The tested sizes
include S1(5,5,6), S2(5,5,12), S3(5,10,12). In each
stage, the number of components |J
k
| is randomly
generated from the range [1, 8]. Note that Ye et al.
(2019) looks at the design of systems with the same
structure but considers instances with only up to |K| =
4 and |J
k
| = 3. (The number of clients and the number
of periods are not considered in this design problem.)
For each size, we have solved 10 independently
generated instances using both models (M1) and
(M2). The computational results are collected in Ta-
bles 1, 2, and 3, respectively. In these tables, the first
column denotes the instance index in different sizes,
for example, ‘S1-1’ is the first instance within size S1.
The columns labeled (M1) and (M2) report respec-
tively the results obtained by models (M1) and (M2),
including their optimal objective values (Obj), com-
puting times in seconds (T(s)), and Number of Main-
tenances (NoM). Besides, ’-’ denotes infeasibility of
model M2 for solving corresponding instances.
Table 1: Experimental results for size S1(5, 5, 6).
(M1) (M2)
ID Obj T(s) NoM Obj T(s) NoM
S1-1 102 0.3 0 102 0.3 0
S1-2 62 0.3 1 64 0.3 1
S1-3 46 0.4 0 46 0.4 0
S1-4 78 0.3 0 78 0.3 0
S1-5 143 0.3 0 143 0.3 0
S1-6 255 0.3 3 321 0.8 4
S1-7 103 0.3 1 108 0.3 1
S1-8 74 0.2 0 74 0.2 0
S1-9 493 0.3 1 497 0.4 1
S1-10 414 0.3 0 414 0.3 0
Table 2: Experimental results for size S2(5, 5, 12).
(M1) (M2)
ID Obj T(s) NoM Obj T(s) NoM
S2-1 641 14.9 3 655 49.5 3
S2-2 158 0.9 0 158 1.8 0
S2-3 490 1.4 1 3694 186 1
S2-4 285 2.7 2 358 6.6 3
S2-5 625 0.7 1 630 6.2 1
S2-6 470 2.8 1 473 3.9 1
S2-7 238 0.9 2 248 1.7 2
S2-8 760 2.8 1 765 1.9 1
S2-9 1173 4.4 3 - - -
S2-10 493 27.8 3 507 422 3
4.2 Analysis of Results
From the tables, we have the following observations.
(i) The optimal values obtained by model (M2) are
no smaller than the ones by model (M1). This
is due to two factors, namely the additional term
in the objective function and the additional con-
straints (see also (iv) below).
(ii) The computing time of model (M2) is generally
greater than that of model (M1). This makes
sense since the RBMO-RL problem is more com-
plicated than the RBMO problem.
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
174
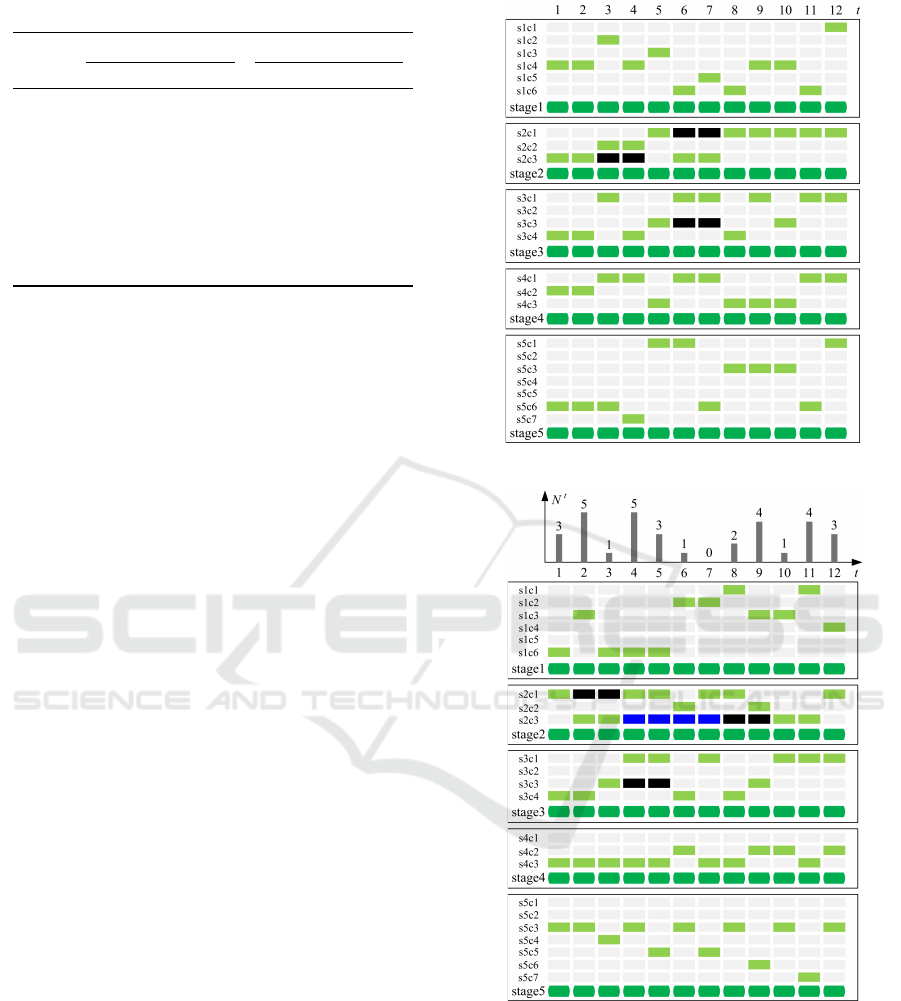
Table 3: Experimental results for size S3(5, 10, 12).
(M1) (M2)
ID Obj T(s) NoM Obj T(s) NoM
S3-1 408 162 6 ifsb - -
S3-2 352 4.9 2 367 11.0 2
S3-3 621 6.0 2 629 45.7 2
S3-4 954 5.4 1 957 7.9 1
S3-5 1322 5.2 4 1340 254 4
S3-6 2355 34.9 6 - - -
S3-7 966 2.1 1 977 8.1 1
S3-8 5675 5.7 1 5685 6.4 1
S3-9 367 5.6 1 370 9.4 1
S3-10 1146 5.3 2 1454 18.4 2
(iii) For the instances with ‘NoM = 0’, the objective
values obtained by the two models are the same.
The reason is that resource limitation is trivial if
there is no maintenance in the planning horizon.
(iv) The NoM obtained by model (M2) may be more
than that of model (M1). The reason is that, in
(M2), the waiting time for maintaining a com-
ponent is a part of unavailable time. Hence, an-
other component needs to operate to avoid system
breakdown, which may bring new maintenance.
However, model (M1) never has this trouble since
maintenance can be done once it occurs.
(v) Model (M1) always has feasible solutions because
maintenance can be done as soon as it is necessary
without needing to account for resource availabil-
ity. However, model (M2) may generate infeasi-
ble solutions if available resources cannot satisfy
maintenance needs in the planning horizon.
To sum up, considering resource limitations in
RBMO-RL (model (M2)) makes it more detailed than
RBMO (model (M1)) and changes the optimal main-
tenance plan. However, model (M2) is more realistic
because maintenance is usually done subject to avail-
able staff, equipment, etc.
4.3 Maintenance Decisions Comparison
In this part, we use an instance to distinguish main-
tenance decisions for the considered RBMO and
RBMO-RL problems. As shown in Figures 5 and 6,
the planning horizon contains 12 periods (horizontal
labels). The system consists of 5 stages and the ded-
icated number of components in each stage is given.
For example, ’s1c6’ represents component 6 in stage
1. For component’s states, the grey, green, blue, and
black rectangles denote that a component is standby,
working, waiting for maintenance, and under main-
tenance, respectively. Besides, a darker-green icon
means that a stage is operating during a period.
Figure 5 shows that the stages in the system are
Figure 5: Maintenance decisions for RBMO problem.
Figure 6: Maintenance decisions for RBMO-RL problem.
always working in the planning horizon. There are a
total of 3 maintenance actions, for example, compo-
nent 1 in stage 2 (’s2c1’) is maintained during periods
6 and 7. Hence in the RBMO problem, the mainte-
nance can always start whenever there is a need.
In the case considering limited resources N
t
shown in Figure 6 and required resources for main-
tenance n
k
= {1, 1, 3, 4, 1}, we observe that there are
also 3 maintenance actions in the planning horizon.
Prognostic-based Maintenance Optimization in Complex Systems with Resource Limitation Constraints
175

However, we have a 4-period waiting for maintain-
ing s2c3. With the fact that its maintenance occupies
2 periods, we know that s2c3 cannot start the main-
tenance in period 4 since s3c3 is being maintained
during periods 4 and 5, and there is no enough re-
source to maintain s2c3 and s3c3 together in period 5
(n
2
+ n
3
> N
5
). Besides, s2c3 cannot start the main-
tenance in period 6 due to lack of available resources
in period 7 (n
2
> N
7
). Finally, its maintenance is con-
ducted in periods 8 and 9 since n
2
< N
8
and n
2
< N
9
.
5 CONCLUSIONS AND
PERSPECTIVES
In this paper, we addressed RUL-based maintenance
optimization in generic complex production systems.
Component-level RUL information was used to ar-
range redundancy in each stage to guarantee the avail-
ability of the system. Besides, resource limitation
constraints were integrated with respect to real-life
applications and scenarios. The purpose is to sat-
isfy client demands with minimum overall cost dur-
ing the maintenance planning horizon. We provided a
mixed-integer linear programming approach to cope
with problem instances. Through different test in-
stances, we showed the efficiency of our approach to
reach the optimal solutions of the addressed problems
in different complex systems.
Our future work will focus on (i) considering
setup cost when activating standby components; (ii)
Considering the probabilities or quantiles of the RUL
of component; (iii) Developing more efficient algo-
rithms and heuristics; (iv) Taking multi-site mainte-
nance optimization into account.
ACKNOWLEDGEMENTS
This work is supported by the project Maintenance
Pr
´
evisionelle et Optimisation of IRT SystemX.
REFERENCES
https://www.ibm.com/docs/en/icos/12.7.1.0?topic=smippqt-
miqcp-mixed-integer-programs-quadratic-terms-in-
constraints. MIQCP: mixed integer programs with
quadratic terms in the constraints.
Bahria, N., Chelbi, A., Bouchriha, H., and Dridi, I. H.
(2019). Integrated production, statistical process con-
trol, and maintenance policy for unreliable manufac-
turing systems. International Journal of Production
Research 57(8): 2548-2570.
Camci, F. (2009). System maintenance scheduling with
prognostics information using genetic algorithm.
IEEE Transactions on Reliability 58(3): 539-552.
Camci, F., Medjaher, K., Atamuradov, V., and Berdinya-
zov, A. (2019). Integrated maintenance and mission
planning using remaining useful life information. En-
gineering optimization 51(10): 1794-1809.
Chen, Z., Li, Y., Xia, T., and Pan, E. (2019). Hidden Markov
model with auto-correlated observations for remain-
ing useful life prediction and optimal maintenance
policy. Reliability Engineering & System Safety 184:
123-136.
De Jonge, B. and Scarf, P. A. (2020). A review on mainte-
nance optimization. European Journal of Operational
Research 285(3): 805-824.
Dong, W., Liu, S., Cao, Y., Javed, S. A., and Du, Y. (2020).
Reliability modeling and optimal random preventive
maintenance policy for parallel systems with dam-
age self-healing. Computers & Industrial Engineering
142: 106359.
Do, P., Voisin, A., Levrat, E., and Lung, B. (2015). A proac-
tive condition-based maintenance strategy with both
perfect and imperfect maintenance actions. Reliability
Engineering & System Safety 133: 22-32.
Lei, Y., Li, N., Guo, L., Li, N., Yan, T., and Lin, J. (2018).
Machinery health prognostics: A systematic review
from data acquisition to RUL prediction. Mechanical
Systems and Signal Processing 104: 799-834.
Lei, X. and Sandborn, P. A. (2018). Maintenance scheduling
based on remaining useful life predictions for wind
farms managed using power purchase agreements. Re-
newable Energy 116: 188-198.
Rivera-G
´
omez, H., Gharbi, A., Kenn
´
e, J. P., Monta ˜no-
Arango, O., and Corona-Armenta, J. R. (2020). Joint
optimization of production and maintenance strategies
considering a dynamic sampling strategy for a deteri-
orating system. Computers & Industrial Engineering
140: 106273.
Si, X. S., Wang, W., Hu, C. H., and Zhou, D. H. (2011).
Remaining useful life estimation - a review on the sta-
tistical data driven approaches. European Journal of
Operations Research 213: 1-14.
Wu, S. and Castro, I. T. (2020). Maintenance policy for a
system with a weighted linear combination of degra-
dation processes. European Journal of Operational
Research 280(1): 124-133.
Xenos, D. P., Kopanos, G. M., Cicciotti, M., and Thornhilla,
N. F. (2016). Operational optimization of networks
of compressors considering condition-based mainte-
nance. Computers & Chemical Engineering 84: 117-
131.
Ye, Y., Grossmann, I. E., Pinto, J. M., and Ramaswamy,
S. (2019). Modeling for reliability optimization of
system design and maintenance based on Markov
chain theory. Computers & Chemical Engineering
124: 381-404.
Zhou, H., Wang, S., Qi, F., and Gao, S. (2019). Maintenance
modeling and operation parameters optimization for
complex production line under reliability constraints.
Annals of Operations Research 1-17.
Zhu, Z., Xiang, Y., and Zeng, B. (2021). Multicomponent
maintenance optimization: a stochastic programming
approach. INFORMS Journal on Computing 33(3):
898-914.
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
176
