Fine-grained Action Recognition using Attribute Vectors
Sravani Yenduri, Nazil Perveen, Vishnu Chalavadi and C. Krishna Mohan
Indian Institute of Technology Hyderabad, Kandi, Sangareddy, Telangana, 502285, India
Keywords:
Spatio-temporal Features, Gaussian Mixture Model (GMM), Maximum A Posterior (MAP) Adaptation,
Factor Analysis, Fine-grained Action Recognition.
Abstract:
Modelling the subtle interactions between human and objects is crucial in fine-grained action recognition.
However, the existing methodologies that employ deep networks for modelling the interactions are highly
supervised, computationally expensive, and need a vast amount of annotated data for training. In this paper, a
framework for an efficient representation of fine-grained actions is proposed. First, spatio-temporal features,
namely, histogram of optical flow (HOF), and motion boundary histogram (MBH) are extracted for each input
video as these features are more robust to irregular motions and capture the motion information in videos
efficiently. Then a large Gaussian mixture model (GMM) is trained using the maximum a posterior (MAP)
adaption, to capture the attributes of fine-grained actions. The adapted means of all mixtures are concatenated
to form an attribute vector for each fine-grained action video. This attribute vector is of large dimension
and contains redundant attributes that may not contribute to the particular fine-grained action. So, factor
analysis is used to decompose the high-dimensional attribute vector to a low-dimension in order to retain only
the attributes which are responsible for that fine-grained action. The efficacy of the proposed approach is
demonstrated on three fine-grained action datasets, namely, JIGSAWS, KSCGR, and MPII cooking2.
1 INTRODUCTION
The fundamental task of action recognition is to dis-
tinguish various human actions performed in a given
video. Human action recognition has gained interest
in recent years because of its potential in applications
like surveillance videos, video retrieval, human-robot
interaction, and autonomous driving vehicles. De-
spite the intensive progress in action recognition, the
existing state-of-the-art methods recognize only full
body activities like jumping, waving, etc. But these
methods are unable to differentiate between actions
such as cut & peel, take out from cupboard & take out
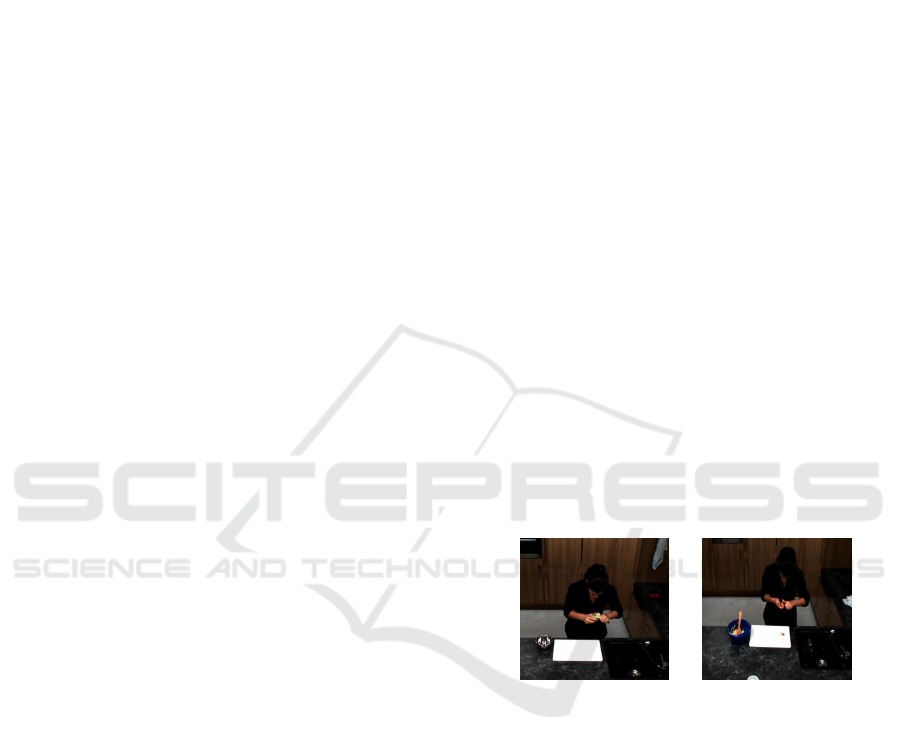
from fridge, cut dice & cut stripes etc. These actions
are visibly similar to each other and have high inter-
class similarity as shown in Figure 1, which are called
fine-grained actions. For instance, recognizing simi-
lar actions in a cooking activity like cut, cut dice, cut
apart, peeling constitute fine-grained action recogni-
tion. Recognizing human actions in finer detail has in-
creased research interest because of its applications in
human-computer interaction, video description, and
surveillance videos. Fine-grained action recognition
is very challenging when compared to action recogni-
tion due to high inter-class similarity, low intra-class
(a) cut (b) peel
Figure 1: Fine-grained actions in cooking activity
(Rohrbach et al., 2016).
similarity, presence of diverse objects, large variation
in performing the same task, occlusion, and viewpoint
variations.
Existing methods model the interaction between
human and objects by detecting the objects explicitly.
The explicit object detection methods require large
annotated data, and cannot detect objects in low il-
lumination conditions. To overcome this problem, Ni
(Ni et al., 2016) employed LSTMs to recognise the
object-specific actions by consolidating the object de-
tections. Also, bi-directional long short term mem-
ory (Bi-LSTM) (Singh et al., 2016) is used to model
the long-term temporal association between the hu-
man and objects without the need for explicit object
134
Yenduri, S., Perveen, N., Chalavadi, V. and Mohan, C.
Fine-grained Action Recognition using Attribute Vectors.
DOI: 10.5220/0010828700003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
134-143
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

detection. The aforementioned approaches are com-
putationally complex while calculating deep features
for given videos.
The holistic approach for better representation
of fine-grained actions with low computational com-
plexity is to encode dense trajectories with Fisher vec-
tor representation. However, the use of only low-level
features for classification will restrict the local infor-
mation which is important in recognising fine-grained
actions. So there is a need for better discriminative
representation using these low-level features to model
the human-object interactions, as the low-level fea-
tures are computationally less expensive.
In this paper, we propose an approach to ob-
tain the universal representation for each fine-grained
action without explicit object detection. The main
aim of the proposed work is to capture the attributes
that can model the interactions effectively in a sin-
gle model. Here, attributes are the units that form
a fine-grained action. For instance, cut action in
cooking activity is described as a sequence of at-
tributes such as right-wrist retraction, left-hand ro-
tate etc. In the proposed approach, we train a large
Gaussian mixture model (GMM) to model the at-
tributes of all fine-grained actions. Then an attribute
vector is formed by concatenating the means which
are adapted using maximum a posteriori adaptation
(MAP) for each fine-grained action. This attribute
vector is of high-dimension and consists of the redun-
dant attributes that do not contribute to a particular
fine-grained action. So, this attribute vector is decom-
posed to low-dimensional one using factor analysis
for efficient representation of the features. We evalu-
ate our method on three fine-grained action datasets,
namely, JHU-ISI gesture skill & assessment working
set (JIGSAWS), kitchen scene context-based gesture
recognition (KSCGR), and Max Planck Institute for
Informatics (MPII) cooking2 datasets. The main con-
tributions of the proposed method are:
• We propose a framework to represent fine-grained
actions using attribute modelling where annota-
tion of objects is not needed explicitly.
• We obtain a low-dimensional feature representa-
tion of each video clip for better discrimination of
fine-grained actions.
• Demonstration of proposed approach on 3 wide
variety of datasets constituting fine-grained ac-
tions. These datasets include cooking activity and
robotic arm surgeries as fine-grained actions to be
recognised.
2 RELATED WORK
In order to overcome the existing challenges, exten-
sive research has been carried out to recognise actions
in trimmed videos. In the past decade, research in
action recognition has evolved from traditional hand
crafted methods to current deep learning methods.
Traditional action recognition methods explored sev-
eral hand crafted features, namely, spatio-temporal in-
terestpoints (STIP) (Ivan, 2005), improved dense tra-
jectory (IDT) (Wang et al., 2011), etc to represent ac-
tions in a video. These features are usually extracted
by tracking the interest points that are either densely
sampled or detected by 3D harris corner detector,
throughout the video. Descriptors, namely, HOG,
HOF, and MBH are extracted around these interest
points and encoded using different feature encoding
techniques such as Fisher vector (Manel et al., 2015)
, vector of locally aggregated descriptors (VLAD)
(Herve et al., 2011), and Bag of words (Alexandros
et al., 2014) to classify actions present in a video.
Maria (Maria and Joan, 2018) proposed an approach
to improve the performance of IDT by incorporating
a new feature namely temporal templates. These tem-
poral templates are constructed by computing three
different projections for an input video. Feature de-
scriptors of each projection are encoded using Fisher
vectors. The Fisher vectors from these three projec-
tions are integrated by sum pooling and are fed to
SVM to classify actions.
Motivated by the success of deep learning meth-
ods in various vision tasks such as image classifi-
cation, object recognition, and segmentation, several
CNN based approaches have been presented for ac-
tion recognition. Andrej (Andrej et al., 2014) has in-
vestigated several fusion techniques to incorporate the
temporal information, as conventional CNN captures
only the spatial information from the RGB frames.
Later two-stream networks (Heeseung et al., 2018;
Yamin et al., 2018) are proposed, to learn the spatial
and motion information by individual streams whose
input is RGB frames and optical flow of few consec-
utive frames, respectively. Encouraged from a two-
stream network, Zhigang (Zhigang et al., 2018), pro-
posed a multi-stream CNN to classify actions. First,
the region of interest is extracted from each frame by
using a motion saliency measure. These regions of
interest are considered to contain discriminative in-
formation that are essential to classify actions. The
inputs to multi-stream are the images cropped to the
region of interest and an entire RGB image to incor-
porate both local and global spatial information, re-
spectively. However, the 2D-CNN, multi-stream net-
works are efficient in extracting only spatial informa-
Fine-grained Action Recognition using Attribute Vectors
135

tion, but tend to ignore the discriminative motion in-
formation necessary for classifying actions.
In order to overcome this limitation, 3D-CNN
models (Tran et al., 2015) are introduced to capture
spatio-temporal information of an action. Nonethe-
less, 3D models are difficult to train and computa-
tionally expensive. Later, Wang et al. (Wang et al.,
2016) introduced a temporal segment networks (TSN)
to model long-term temporal structure by adopting a
novel temporal sampling strategy to obtain the video-
level representation for each action. Hao (Hao et al.,
2019) proposed an asymmetric 3D convolutional net-
work to reduce the number of parameters and com-
putational complexity. Similarly, temporal shift mod-
ule (TSM) (Lin et al., 2019) is incorporated into 2D
CNNs to model temporal information without addi-
tional computational cost. Although these approaches
can effectively classify coarse-grained actions such as
lifting, diving, and running etc, they fail to model sub-
tle interactions between the human and object which
are crucial in fine-grained actions.
Zhou (Zhou et al., 2015) proposed a mid-level ap-
proach to model the interactions between human and
objects, by generating the discriminative interaction
regions. This method does not need explicit object
detection and thus reduces the human labor for an-
notation. The interaction regions are generated us-
ing the BING proposal tool (Cheng et al., 2014) and
these are tracked based on the appearance, motion,
and spatial overlap to form a graph. The resultant
graph is divided into sub-graphs by graph segmenta-
tion algorithm to classify fine-grained actions, where
these sub-graphs represent the human object interac-
tion parts.
Singh (Singh et al., 2016) proposed a multi-stream
bi-directional recurrent neural network (MSB-RNN)
for localizing a fine-grained action temporally and
spatially in each frame. Similarly, Miao (Miao et al.,
2018), addressed the issues of both coarse and fine-
grained action recognition by introducing a region
based six stream CNN model. Firstly, prominent hu-
man poses and positions are detected in the video se-
quence and are cropped to different scale regions to
obtain the richer spatio-temporal information. These
cropped regions are fed to 6 independent CNNs as in-
puts and the obtained feature descriptors are concate-
nated to classify fine-grained actions. This framework
efficiently recognises fine-grained actions by claim-
ing that the spatial regions contain better discrimi-
native information. But, it overlooks the fact that
the temporal information is also significant in fine-
grained action recognition. For example, take out
from cupboard and put in cupboard fine-grained ac-
tions can be distinguished only by considering motion
information.
However, the limitations of existing approaches
are: (i) highly supervised, need a large amount of an-
notated data and (ii) computationally expensive when
extracting the deep features of long duration videos.
3 PROPOSED APPROACH
The block diagram for the proposed approach is pre-
sented in Figure 2. First, the spatio-temporal features
like the HOF and MBH are extracted for each input
video. Then a large GMM is trained using the maxi-
mum aposteriori (MAP) adaptation, to capture the at-
tributes of fine-grained actions. The adapted means of
all mixtures of a large GMM are concatenated to form
a high-dimensional attribute vector. Finally, the ob-
tained feature vector is reduced to a low-dimensional
attribute vector using factor analysis to retain only the
attributes responsible for the fine-grained action. The
above framework is described in detail in the follow-
ing sub-sections.
3.1 Feature Extraction
Initially, feature points are densely sampled on a grid
with a step size of 5 pixels on each spatial scale sepa-
rately. Trajectories are extracted densely for 8 spa-
tial scales and the main objective of the dense tra-
jectories is to track the points throughout the video
(Wang et al., 2011). The tracked position of the point
Q
t
= (x
t
,y
t
) in the frame F
t+1
is obtained by using a
median filtering kernel K on dense optical flow field
o
t
Q
t+1
= (x
t+1
,y
t+1
) = (x
t
,y
t
) +(K × o
t
)|
x
t
,y
t
. (1)
Trajectories are formed by concatenating the points
of subsequent frames (Q
t
,Q
t+1
,Q
t+2
,....). Trajecto-
ries drift away from their initial position during the
tracking process, so the trajectory length is confined
to 15 frames. The descriptors are computed within a
spatio-temporal volume of size M × M pixels and 15
frames long to find the motion information. The ori-
entations of the descriptors are quantized into 8 bins.
Further zero bin is added for HOF (9 bins). The HOG
descriptor is of size 96 (2 × 2 × 3 × 8) and HOF is
of 108 descriptor size (2 × 2 × 3 × 9). Optical flow
consists of background camera motion and the mo-
tion of camera may bias the decision of action clas-
sification. In order to overcome this limitation, we
consider motion boundary histogram (MBH) features
as it computes spatial derivatives of optical flow lead-
ing to removal of the constant camera motion. The
orientation of the spatial derivatives is quantized into
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
136

Figure 2: Systematic representation of the proposed approach (best viewed in color).
8 bin histogram for MBHx, MBHy separately leading
to the descriptor size of 96 (2 × 2 ×3×8) each. Thus,
the obtained feature descriptors are used to model the
large GMM for each descriptor separately.
3.2 Gaussian Mixture Models (GMM)
A video clip is considered to be a random process
whose distribution is assumed to be Gaussian. In or-
der to find the similarity among fine-grained action
clips, parameters of the Gaussian distribution have
to be estimated. These parameters are estimated by
training a GMM for each fine-grained action. Thus a
single large GMM is trained because training a GMM
for each fine-grained action is challenging when there
is a vast number of actions. The GMM can be repre-
sented as
p(x
k
) =
Q
∑
q=1
w
q
N (x
k
|µ
µ
µ
q
,σ
σ
σ
q
), (2)
where w
q
are the mixture weights, which satisfy the
constraints, 0 ≤ w
q
≤ 1, and
Q
∑
q=1
w
q
= 1. The mean
and covariance of the mixture q are given by µ
µ
µ
q
and σ
σ
σ
q
, respectively. Feature vector x
k
belongs to
{x
1
,x
2
,....,x
K
} of a video clip x. The x
k
can be a
HOF or MBH descriptor and a separate large GMM
is trained for each feature descriptor using Expecta-
tion maximisation (EM) estimation. After training
the GMM, we assume that each component of GMM
captures an attribute of fine-grained actions. MAP
adaptation is used to obtain the probability distribu-
tion function (pdf) that describes the clip.
3.3 Attribute Vector Representation
The posterior probability of an attribute, given the fea-
ture vector x
k
is written as
p(q|x
k
) =
w
q
p(x
k
|q)
∑
Q
q=1
w
q
p(x
k
|q)
, (3)
where w
q
is the prior probability of the particular mix-
ture q. The likelihood of the feature x
k
coming from
mixture q is represented as p(x
k
|q) . The likelihood
p(q|x
k
), and x
k
are used to find the weight, and mean
parameters (Reynolds et al., 2000) also known as ze-
roth and first order Baum-Welch statistics, given by
n
q
(x) =
K
∑
k=1
p(q|x
k
), (4)
and
F
q
(x) =
1
n
q
(x)
K
∑
k=1
p(q|x
k
)x
k
, (5)
respectively. The adapted means and weights of each
mixture q is given by
ˆw
q
= αn
q
(x)/K + (1 − α)w
q
, (6)
and
ˆ
µ
µ
µ
q
= αF
q
(x) +(1 − α)µ
µ
µ
q
. (7)
Fine-grained Action Recognition using Attribute Vectors
137

The obtained adapted means of each mixture q are
concatenated to form QK × 1 high dimensional at-
tribute vector, i.e.,
A(x) = [
ˆ
µ
µ
µ
1
ˆ
µ
µ
µ
2
...
ˆ
µ
µ
µ
Q
]
t
. (8)
This high-dimensional attribute vector consists of the
attributes that do not contribute to the video clip,
which results in close to zero Baum-Welch statistics.
So, we use an appropriate decomposition method to
obtain the efficient low-dimensional attribute vector.
The high dimensional attribute vector is decomposed
as A = m + Vr, where m is a vector independent of
viewpoint variation, V is known as variability matrix
of size QK × l and r is an l-dimensional random vec-
tor having Gaussian distribution. This random vec-
tor is referred to as a low-dimensional attribute vector
and is given by the posterior distribution P(r|x) i.e.,
p(r|x) ∝ P(x|r)N (0,1),
and
p(r|x) ∝ exp
−
1
2
(r −H(x))
t
M(x)(r −H(x)
,
(9)
where H(x) = M
−1
(x)V
t
Σ
Σ
Σ
−1
ˆ
A(x),
ˆ
A(x) is the cen-
tred vector, and Σ
Σ
Σ is a diagonal covariance matrix of
dimension QK × QK. The mean of the adapted GMM
is given by
ˆ
F
q
(x) =
K
∑
k=1
p(q|x
k
)(x
k
− µ
µ
µ
q
). (10)
The
ˆ
A(x) is formed by concatenating the first-order
statistics as
ˆ
A(x) = [
ˆ
F
1
(x)
ˆ
F
2
(x).....
ˆ
F
Q
(x)]
t
. The ma-
trix M(x) is defined as M(x) = I + V
t
Σ
Σ
Σ
−1
N(x)V,
where N(x) is a diagonal matrix with n
q
(x)I of QK ×
QK dimension and I is the identity matrix. The mean
and covariance matrix from Equation 7 are given by
E[r(x)] = M
−1
(x)V
t
Σ
Σ
Σ
−1
ˆ
A(x), and Cov(r(x),r(x)) =
M
−1
(x), respectively. EM algorithm is employed to
estimate the mean and covariance iteratively in the
E-step and to update V, Σ
Σ
Σ in the M-step. In E-step,
m and Σ
Σ
Σ are initialized with GMM mean and covari-
ance, respectively. In M-step, V is obtained by solv-
ing
∑
x
N(x)VE[r(x)r
t
(x)] =
∑
x
ˆ
A(x)E[r
t
(x)], which
results in l linear equations. The residual matrix is
given by
Σ
Σ
Σ
q
=
1
n
q
x
∑
x
ˆ
S
q
(x) −M
q
, (11)
where M
q
is the q
th
diagonal block of the QK × QK
matrix and
ˆ
S
q
(x) is the second-order statistics given
by
ˆ
S
q
(x) = diag
K
∑
k=1
p(q|x
k
)(x
k
− µ
µ
µ
q
)(x
k
− µ
µ
µ
q
)
t
.
(12)
After the final estimation of V and Σ matrices, the
attribute vector for a given clip is written as
r(x) = (I + V
t
Σ
Σ
Σ
−1
N(x)V)
−1
V
t
Σ
Σ
Σ
−1
ˆ
A(x). (13)
This process of decomposing the high-dimensional
attribute vector to low-dimensional attribute vector is
called factor analysis. The V-matrix obtained after
decomposition contains the eigenvectors of largest l
eigenvalues. These eigenvalues are from the Gaus-
sian mixtures that model the attributes in the given
clip. The computation complexity of calculating r is
O(QKl + Ql
2
+ l
3
).
3.4 Classification of Fine-grained
Actions
Multi-class SVM is employed to classify the fine-
grained actions and the obtained low-dimensional at-
tribute vectors are used to find the similarity between
two fine-grained actions. Although recent methods
exploit neural networks for classification, SVM is
dominant when the training samples for each class are
few in number and can be trained efficiently (Hearst
et al., 1998). The SVM is a supervised learning
model, which minimizes the objective function
J =
1
2
n
∑
i=1
n
∑
j=1
α
i
α
j
y
i
y
j
K(x
T
i
,x) −
n
∑
i=1
α
i
, (14)
where α
i
are lagrange’s multipliers and n is the num-
ber of video clips. K(x
T
i
,x) is the kernel function to
obtain similarity between two vectors. During the
testing process, the decision function for the low-
dimensional test attribute vector x
t
is given by
f (x
t
) = sign
m
∑
i=1
α
i
y
i
K(x
i
,x
t
) +b
!
. (15)
The sign value of f (x
t
) is used to determine the class
of x
t
. For a multi-class classification problem, the
SVM based on the one-against-the-rest approach is
used to discriminate the video clips of that class from
video clips of all other classes.
4 EXPERIMENTAL RESULTS
In the proposed method, a large GMM is trained on
the HOF, MBH, and 3D-CNN descriptors separately
for various mixtures ranging from 32, 64, 128, 256,
and 512. The adapted means of the mixtures are con-
catenated resulting in a high dimension attribute vec-
tor. For example, an attribute vector obtained from
a 32 component GMM is (32 × 108) = 3456 where
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
138

(a) (b)
Figure 3: Confusion matrix of attribute vector for (a) JIG-
SAWS dataset and (b) KSCGR dataset.
32 is the number of mixtures and 108 is the dimen-
sion of the HOF feature descriptor. Also, as the com-
ponents of GMM increase, the dimension of the at-
tribute vector also increases. Also, it contains redun-
dant attributes that may not contribute to a particular
fine-grained action. So, the dimension of the attribute
vector is reduced to 200-dimensions using the factor
analysis method. The performance of the proposed
approach is evaluated on the variety of fine-grained
action datasets that are chosen from 2 different appli-
cations, namely, ‘medical surgeries’ and ‘cooking’.
In experiments, we extract features from final layer
of pre-trained 3D-CNN network after fine-tuning on
our datasets (Hara et al., 2018). Three independent
GMMs are trained separately for HOF, MBH, and 3D-
CNN descriptors to demonstrate the efficacy of the
proposed approach. The detailed analysis of the per-
formance of the proposed approach for each dataset is
described in the following sub-sections.
4.1 JHU-ISI Gesture and Skill
Assessment Working Set
(JIGSAWS)
JIGSAWS dataset consists of videos recorded by en-
doscopic cameras placed on the right and left sides of
a surgical robotic arm (Gao et al., 2014). Fine-grained
actions, namely, ‘suturing (SUT)’, ‘needle passing
(NP)’, and ‘knot tying (KT)’ are performed by 8 dif-
ferent subjects. Each subject repeats all fine-grained
action 5 times. The dataset contains 78 videos on su-
turing, 56 videos on needle passing, and 72 videos
on knot tying. Figure 3a gives the confusion matrix
of the best performance mixture model on JIGSAWS
dataset. It can be seen from the figure that the to-
tal classification accuracy is close to the classification
accuracy of each fine-grained action depicting that the
proposed GMM captures attributes of all fine-grained
actions uniformly. From the Figures 4a, 4b, 4c it can
be observed the absolute discrimination of the three
fine-grained actions.
Table 2 gives the comparison of the proposed ap-
proach with other deep learning baseline architectures
on JIGSAWS dataset. Fawaz (Fawaz et al., 2018)
leveraged the efficiency of CNNs to extract the pat-
terns of motions performed in robotic surgery. The
activation maps of CNNs highlight the parts which
influence the classification of surgical tasks. Funke
(Funke et al., 2019) investigated inflated 3D ConvNet
to classify video snippets (few consecutive frames)
extracted from untrimmed videos. It can be inferred
from Table 2 that the proposed method performs on
par with the existing supervised deep learning ap-
proaches.
4.2 Max Planck Institute for
Informatics (MPII cooking2)
MPII cooking2 dataset consists of cooking videos
performed by 30 different subjects (Rohrbach et al.,
2016). Each subject performs 62 different fine-
grained actions such as ‘cut dice’, ‘cut stripes’, ‘peel-
ing’, etc. The dataset contains 273 untrimmed videos,
where train and test sets are split based on the num-
ber of subjects. Train set consists of videos performed
by 20 subjects and remaining 10 subjects are consid-
ered for test set. The class-wise classification per-
formance on MPII cooking2 dataset is shown in Fig-
ure 6. It compares the correctly classified samples
(in blue colour) with the total number of test samples
(in green colour). The row at the bottom gives the
class-wise classification accuracy. From the figure, it
can be observed that the proposed approach differenti-
ates well among the fine-grained actions such as ‘take
out from cupboard’, ‘take out from drawer’, ‘take out
from fridge’ etc, without the need for explicit object
detection. Figure 5a shows the clear discrimination of
two most confusing fine-grained actions such as ‘take
out from cupboard’ and ‘take out from drawer’. It can
be observed from Figures 4, 5, that proposed model
can model the subtle interactions between human and
object efficiently.
Table 3 compares the performance of the proposed
approach with existing methods. The pose-based ap-
proach gives low performance because this frame-
work is based on the trajectories extracted from the
joints, which are noisy. The dense trajectories ap-
proach performs better than pose-based approach be-
cause of capturing the robust motion information.
Fine-grained Action Recognition using Attribute Vectors
139
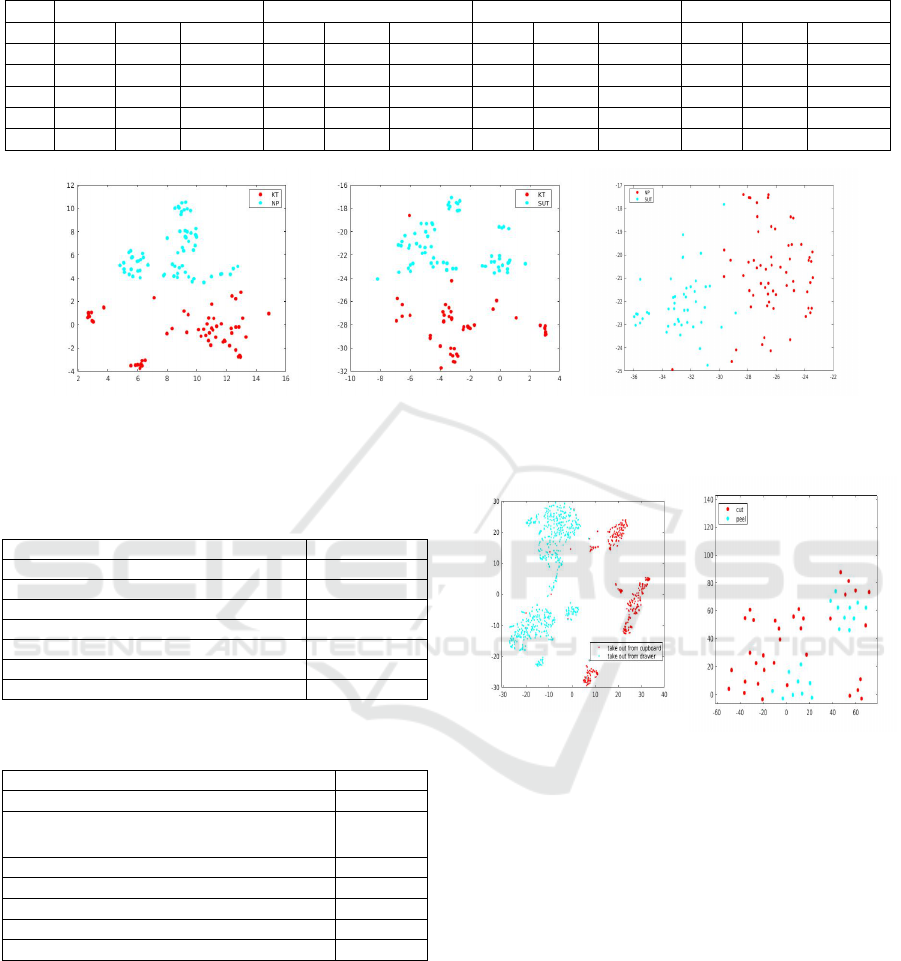
Table 1: Classification accuracy (%) of SVM classifier on various number of mixtures. BTL, ATL refer to before transfer
learning and after transfer learning, respectively.
JIGSAWS KSCGR (BTL) KSCGR (ATL) MPII cooking2
HOF MBH 3DCNN HOF MBH 3DCNN HOF MBH 3DCNN HOF MBH 3DCNN
32 84.5 97 96 61.5 66.7 62 76.2 80.6 78.4 63.7 72.1 69.6
64 85.9 97.6 96.3 65.9 66.7 64 77.4 81.7 78.7 65.4 72.9 70.1
128 87.9 99.2 97.1 63.1 69 65.3 78.6 83.7 80.5 66.7 74.5 72.4
256 90.3 98.5 96.9 58.3 64.3 63.9 77.8 81.7 81.2 68.8 75.7 72.9
512 93.7 98.5 96.7 57.9 63.1 62.8 80.2 80.9 80.2 68 74.7 71.8
(a) (b) (c)
Figure 4: t-SNE plot of attribute vectors for (a) knot tying (KT) vs needle passing (NP) (b) knot tying (KT) vs suturing (SUT)
(c) needle passing (NP) vs suturing (SUT). Here, the axes represent first and second dimensions in the factor analysis
Table 2: Performance (%) comparison on JIGSAWS
dataset.
Method Accuracy (%)
vector space model (Forestier et al., 2017) 82.36
convnet (Wang and Fey, 2018) 93.06
CNN (Fawaz et al., 2018) 97.3
3D Conv Net (Funke et al., 2019) 98.3
TSN (Wang et al., 2016) 98.33
TSM (Lin et al., 2019) 99.1
Proposed approach 99.2
Table 3: Performance (%) comparison on MPII cooking2
dataset.
Method mAP (%)
Pose-based approach (Rohrbach et al., 2016) 24.1
Hand-cSIFT + Hand-Trajectories
(Rohrbach et al., 2016)
43.5
Dense trajectories (Rohrbach et al., 2016) 44.5
Region-sequence CNN (M. et al., 2018) 70.3
TSN (Wang et al., 2016) 68.5
TSM (Lin et al., 2019) 71.2
Proposed approach 73.7
4.3 Kitchen Scene Context-based
Gesture Recognition (KSCGR)
KSCGR dataset consists of cooking videos, contain-
ing fine-grained actions performed by 5 different sub-
jects to assess the various human gestures (A et al.,
2013). There are 8 fine-grained actions, namely,
‘break’, ‘mix’, ‘bake’, ‘turn’, ‘cut’, ‘boil’, ‘season’,
and ‘peel’. The dataset contains 25 training videos
(a) take out from cupboard vs
take out from drawer (b) cut vs peel
Figure 5: t-SNE plot of attribute vectors for (a) MPII cook-
ing2 dataset (b) KSCGR dataset.
and 10 testing videos each ranging from 5 to 10 min-
utes long. The fine-grained actions such as ‘boil’,
‘bake’, and ‘peel’ are hard to recognize as there is
no salient motion present in such actions. Also, the
KSCGR dataset has only a few number of training
videos, therefore GMM is unable to learn the distri-
bution of data efficiently. So, the total variability ma-
trix and GMM trained on MPII cooking2 dataset are
used to form the attribute vectors for fine-grained ac-
tion videos in the KSCGR dataset. The reason for
using the model trained on MPII cooking2 dataset is
that it consists of fine-grained cooking actions simi-
lar to that of KSCGR dataset, namely, ‘peel’, ‘mix’,
‘cut’ etc and the dataset contains enough data to train
the GMM well. The classification accuracy on the
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
140
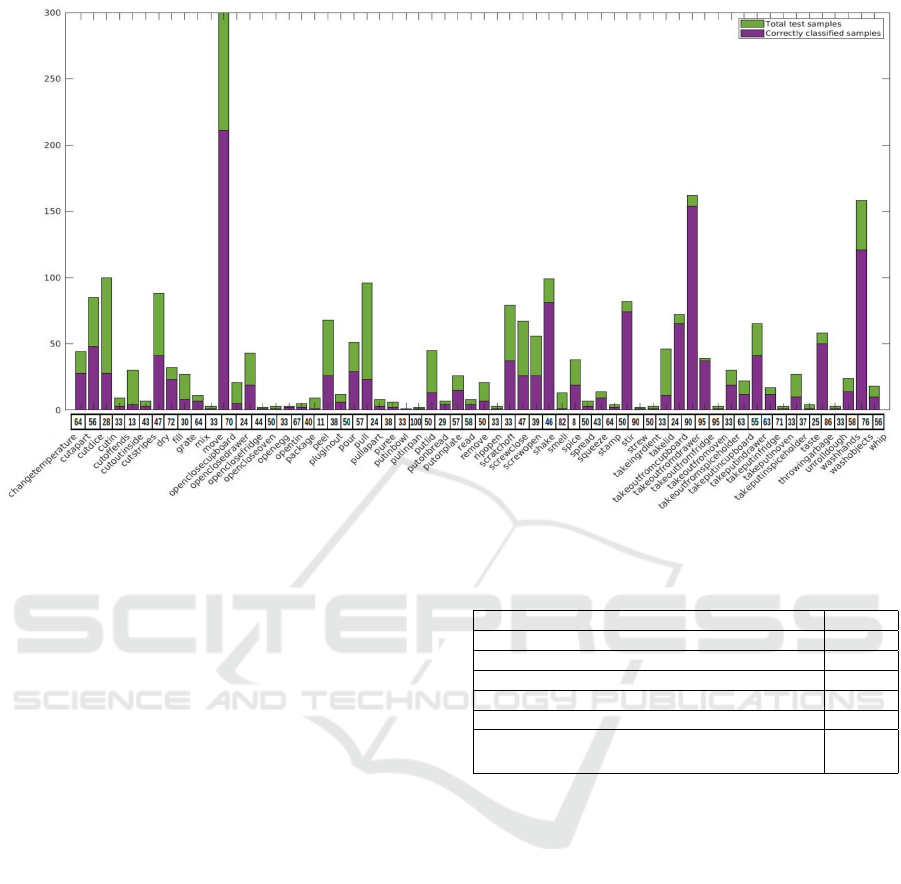
Figure 6: Class-wise classification performance on MPII cooking dataset (best viewed in color). The row at bottom gives the
class-wise classification accuracy.
KSCGR dataset after transfer learning outperforms
the result obtained for GMM trained only on KSCGR
dataset as shown in Table 1. This shows that the pro-
posed approach is able to model the attributes better
where multiple fine-grained actions share the com-
mon attributes. The performance of each class is pre-
sented in the form of the confusion matrix as shown
in Figure 3b. It can be observed that the fine-grained
actions such as ‘cut’ and ‘peel’ are misclassified be-
cause of the overlap of the attribute vectors of these
two actions as shown in Figure 5b.
Table 4 gives the performance comparison of pro-
posed approach with existing methods on KSCGR
dataset. Ni (Ni et al., 2016) leveraged the low-level
features by encoding the IDT features using Fisher
vectors in order to classify the fine-grained actions
using SVM. Granada (Granada et al., 2017) proposed
deep neural architecture for recognising kitchen activ-
ities using ensemble of machine learning models and
hand crafted features to extract efficient representa-
tion of data. It can be observed from Table 4 that the
proposed approach performs better than the existing
deep learning architectures with large margin.
4.4 Ablation Study
The 128 mixture GMM trained on MBH descriptors
gives the best performance on both JIGSAWS and
KSCGR datasets (shown in Table 1) as these datasets
Table 4: Performance comparison on KSCGR dataset.
Method F-score
IDT-IFV-SVM (Ni et al., 2014) 0.76
TSN (Wang et al., 2016) 0.65
TSM (Lin et al., 2019) 0.69
RGB + OF + CNN + SVM (Granada et al., 2017) 0.70
RGB + OF + CNN + NN (Granada et al., 2017) 0.72
Proposed approach
(after transfer learning)
0.824
contains few actions. But for MPII cooking2 dataset,
256 mixture GMM performs better than 128 mixtures,
as 128 mixtures may not be enough to model all 62
fine-grained actions. Also, as the number of mixtures
increases, the classification accuracy reduces. This is
due to the fact that the GMM needs more local in-
formation in order to capture the attributes of fine-
grained actions.The GMM trained on MBH descrip-
tors performs better than 3D-CNN features as MBH
captures local motion information effectively. In ex-
periments, we evaluate the recent state-of-the-art ap-
proaches such as TSN (Wang et al., 2016), TSM (Lin
et al., 2019) on three fine-grained datasets. The pro-
posed approach performs better than the existing deep
learning approaches. This is because the deep learn-
ing methods fail to generalise on smaller datasets,
whereas our proposed GMM model is able to capture
the attributes that multiple fine-grained actions share
relatively better.
Fine-grained Action Recognition using Attribute Vectors
141

5 CONCLUSION
In this paper, a framework is proposed to learn an effi-
cient low-dimensional representation of fine-grained
actions. The fixed dimensional attribute vector per-
forms on-par when compared with the other super-
vised techniques on JIGSAWS, KSCGR, and MPII
cooking2 datasets. The effectiveness of the attribute
vector for classification on the KSCGR dataset proves
that the proposed method performs better even when
there is a few number of samples for each action. We
demonstrate the generalization of the proposed ap-
proach by evaluating on a wide variety of fine-grained
action datasets. Also, the proposed approach can be
adapted in applications such as medical, elderly assis-
tance, autonomous vehicles etc.
REFERENCES
A, S., K, K., D, D., G, M., and H, S. (2013). Kitchen
scene context based gesture recognition: A contest
in icpr2012. International Workshop on Depth Image
Analysis and Applications, 7854:168–185.
Alexandros, I., Anastastios, T., and Ioannis, P. (2014). Dis-
criminant bag of words based representation for hu-
man action recognition. Pattern Recognition Letters,
49:185–192.
Andrej, K., George, T., Sanketh, S., Thomas, L., Rahul, S.,
and Li, F.-F. (2014). Large-scale video classification
with convolutional neural networks. In Proceedings of
the IEEE conference on Computer Vision and Pattern
Recognition, pages 1725–1732.
Cheng, M., Zhang, Z., Lin, W., and Torr, P. (2014). Bing:
Binarized normed gradients for objectness estimation
at 300fps. In IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), pages 3286–3293.
Fawaz, H. I., Forestier, G., Weber, J., Idoumghar, L., and
Muller, P. (2018). Evaluating surgical skills from
kinematic data using convolutional neural networks.
CoRR, abs/1806.02750.
Forestier, G., Petitjean, F., Senin, P., Despinoy, F., and Jan-
nin, P. (2017). Discovering discriminative and inter-
pretable patterns for surgical motion analysis. In Con-
ference on Artificial Intelligence in Medicine in Eu-
rope, pages 136–145. Springer.
Funke, I., Mees, S. T., Weitz, J., and Speidel, S. (2019).
Video-based surgical skill assessment using 3d con-
volutional neural networks. CoRR, abs/1903.02306.
Gao, Y., Vedula, S. S., Reiley, C. E., Ahmidi, N., Varadara-
jan, B., Lin, H. C., Tao, L., Zappella, L., B
´
ejar, B.,
Yuh, D. D., et al. (2014). Jhu-isi gesture and skill
assessment working set (jigsaws): A surgical activity
dataset for human motion modeling. In Miccai work-
shop: M2cai, volume 3, page 3.
Granada, R. L., Monteiro, J., Barros, R. C., and Meneguzzi,
F. R. (2017). A deep neural architecture for kitchen
activity recognition. In The Thirtieth International
Flairs Conference.
Hao, Y., Chunfeng, Y., Bing, L., Yang, D., Junliang, X.,
Weiming, H., and J, M. S. (2019). Asymmetric 3d
convolutional neural networks for action recognition.
Pattern recognition, 85:1–12.
Hara, K., Kataoka, H., and Satoh, Y. (2018). Can spa-
tiotemporal 3d cnns retrace the history of 2d cnns and
imagenet? In Proceedings of the IEEE conference
on Computer Vision and Pattern Recognition, pages
6546–6555.
Hearst, M. A., Dumais, S. T., Osuna, E., Platt, J., and
Scholkopf, B. (1998). Support vector machines. IEEE
Intelligent Systems and their applications, 13(4):18–
28.
Heeseung, K., Yeonho, K., S, L. J., and Minsu, C. (2018).
First person action recognition via two-stream convnet
with long-term fusion pooling. Pattern Recognition
Letters, 112:161–167.
Herve, J., Florent, P., Matthijs, D., Jorge, S., Patrick, P., and
Cordelia, S. (2011). Aggregating local image descrip-
tors into compact codes. IEEE transactions on pattern
analysis and machine intelligence, 34(9):1704–1716.
Ivan, L. (2005). On space-time interest points. International
journal of computer vision, 64(2-3):107–123.
Lin, J., Gan, C., and Han, S. (2019). Tsm: Temporal shift
module for efficient video understanding. In Proceed-
ings of the IEEE/CVF International Conference on
Computer Vision, pages 7083–7093.
M., M., N., M., Y., L., A., L., and R, S. (2018). Region-
sequence based six-stream cnn features for general
and fine-grained human action recognition in videos.
Pattern Recognition, 76:506–521.
Manel, S., Mahmoud, M., and Ben, A. C. (2015). Human
action recognition based on multi-layer fisher vector
encoding method. Pattern Recognition Letters, 65:37–
43.
Maria, C. J. and Joan, C. (2018). Human action recognition
by means of subtensor projections and dense trajecto-
ries. Pattern Recognition, 81:443–455.
Miao, M., Naresh, M., Yibin, L., Ales, L., and Rustam, S.
(2018). Region-sequence based six-stream cnn fea-
tures for general and fine-grained human action recog-
nition in videos. Pattern Recognition, 76:506–521.
Ni, B., Paramathayalan, V. R., and Moulin, P. (2014). Multi-
ple granularity analysis for fine-grained action detec-
tion. In IEEE Conference on Computer Vision and
Pattern Recognition (CVPR), pages 756–763.
Ni, B., Yang, X., and Gao, S. (2016). Progressively parsing
interactional objects for fine grained action detection.
In IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), pages 1020–1028.
Reynolds, D., Quatieri, T. F., and Dunn, R. B. (2000).
Speaker verification using adapted gaussian mixture
models. In Digital Signal Process., volume 10, pages
19–41.
Rohrbach, M., Rohrbach, A., Regneri, M., Amin, S., An-
driluka, M., Pinkal, M., and Schiele, B. (2016). Rec-
ognizing fine-grained and composite activities using
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
142

hand-centric features and script data. International
Journal of Computer vision (IJCV), 119(3):346–373.
Singh, B., Marks, T. K., Jones, M., Tuzel, O., and Shao, M.
(2016). A multi-stream bi-directional recurrent neu-
ral network for fine-grained action detection. In IEEE
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 1961–1970.
Tran, D., Bourdev, L., Fergus, R., Torresani, L., and Paluri,
M. (2015). Learning spatiotemporal features with 3d
convolutional networks. In Proceedings of the IEEE
international conference on computer vision, pages
4489–4497.
Wang, H., Klaser, A., Schmid, C., and Liu, C. (2011). Ac-
tion recognition by dense trajectories. In IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 3169–3176.
Wang, L., Xiong, Y., Wang, Z., Qiao, Y., Lin, D., Tang, X.,
and Van Gool, L. (2016). Temporal segment networks:
Towards good practices for deep action recognition. In
European conference on computer vision, pages 20–
36. Springer.
Wang, Z. and Fey, A. M. (2018). Deep learning with con-
volutional neural network for objective skill evalu-
ation in robot-assisted surgery. International jour-
nal of computer assisted radiology and surgery,
13(12):1959–1970.
Yamin, H., Peng, Z., Tao, Z., Wei, H., and Yanning,
Z. (2018). Going deeper with two-stream convnets
for action recognition in video surveillance. Pattern
Recognition Letters, 107:83–90.
Zhigang, T., Wei, X., Qianqing, Q., Ronald, P., C, V. R.,
Baoxin, L., and Junsong, Y. (2018). Multi-stream
cnn: Learning representations based on human-related
regions for action recognition. Pattern Recognition,
79:32–43.
Zhou, Y., Ni, B., Hong, R., Wang, M., and Tian, Q. (2015).
Interaction part mining: A mid-level approach for
fine-grained action recognition. In IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 3323–3331.
Fine-grained Action Recognition using Attribute Vectors
143
