
Enhanced Local Gradient Smoothing: Approaches to Attacked-region
Identification and Defense
Cheng You-Wei and Wang Sheng-De
Department of Electrical Engineering, National Taiwan University, Taipei, Taiwan
Keywords:
Adversarial Attack, Adversarial Defense, Reactive Defense, Data Pre-processing, Deep Learning.
Abstract:
Mainstream deep learning algorithms have been shown vulnerable to adversarial attacks - the deep models
could be misled by adding small unnoticeable perturbations to the original input image. These attacks could
pose security challenges in real-world applications. The paper focuses on how to defend against an adversarial
patch attack that confines such noises within a small and localized patch area. We will discuss how an ad-
versarial sample affects the classifier output from the perspective of a deep model by visualizing its saliency
map. On the basis of our baseline method: Local Gradients Smoothing, we further design two methods
called Saliency-map-based Local Gradients Smoothing and Weighted Local Gradients Smoothing, integrating
saliency maps with local gradient maps to accurately locate a possible attacked region and perform smooth-
ing accordingly. Experimental results show that our proposed method could reduce the probability of false
smoothing and increase the overall accuracy significantly.
1 INTRODUCTION
In recent years, deep neural architectures have
achieved significant success in most computer vision
fields, including Image Classification, Object Detec-
tion, and face recognition. Convolutional Neural Net-
works (CNNs) became prominent among different ar-
chitectures due to their ability to extract image fea-
tures. Those methods also had been widely applied
to real-world systems like surveillance cameras and
autonomous driving (Huval et al., 2015). The con-
sistency of the learning-based algorithms is one of
the biggest concerns before adopting deep neural net-
works in security-critical applications.
However, Convolutional Neural Networks
(CNNs) had been proven vulnerable to some
well-designed attack methods. J. Goodfellow et
al. (Goodfellow et al., 2015) showed that by slightly
modifying input data or, in other words, adding
subtle noises onto the original input image(s), CNN
models could wrongly classify the input with high
confidence. These noises should be imperceptible to
humans or should not affect human’s recognition of
the image. An adversarial attack could be roughly
explained as finding the minimal perturbation which
is strong enough to alternate the position of the input
in space and cross the decision boundary.
Among all works, attacks can be divided into
two categories: traditional attack and patch attack.
Traditional attack FGSM (Goodfellow et al., 2015),
PGD (Madry et al., 2018) and One Pixel Attack (Su
et al., 2019) do not try to limit the size of the adver-
sarial mask; hence the size of adversarial perturba-
tions can be as large as the target image. However,
even with remarkable success on benchmarks, in real-
world scenarios, there might be some obstacles in ap-
plying those perturbations onto real objects. While
patch attack confines the perturbations in a small area,
those patches can be used as stickers in real-world
scenarios. Image patches generated by Adversarial
Patch (Brown et al., 2017) can cause a classifier to
output any target class and can be printed and added to
any scene. Afterward, LaVAN (Karmon et al., 2018)
will successfully confine the patch to a small, local-
ized patch of the image without covering any of the
main objects and fool the state-of-the-art classifier In-
ceptionv3 (Szegedy et al., 2016).
Applications of the above methods vary in many
parts of life. DPatch (Liu et al., 2019) can fool object
detectors like YOLO and Faster-RCNN with a 40*40
patch. Based on DPatch (Liu et al., 2019), Physical
Adversarial Patches (Lee and Kolter, 2019) fails hu-
man detectors by drawing all attention to the patch
itself. Instead of failing the whole system, Simen
Thys et al. innovated a method (Thys et al., 2019)
254
You-Wei, C. and Sheng-De, W.
Enhanced Local Gradient Smoothing: Approaches to Attacked-region Identification and Defense.
DOI: 10.5220/0010825400003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 2, pages 254-263
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

that only makes the person holding cardboard in front
of the body undetectable by YOLOv2. In addition to
malicious usage, Adversarial CAPTCHAs (Shi et al.,
2021) and Robust Text CAPTCHAs (Shao et al.,
2021) address a more secure CAPTCHA (Completely
Automated Public Turing test to tell Computers and
Humans Apart) with adversarial examples.
Defense against adversarial samples had become
an important security issue. Reactive methods typ-
ically remove adversarial noises by applying sets of
transformations. Simple filters including median and
Gaussian are cheap but perform poorly against strong
attacks. Moreover, these simple filters can be de-
tected by attackers and then used to optimize attack
methods accordingly. Ensemble Defense with Data
Diversity (Li et al., 2021) ensembles a set of filters
with high diversity to satisfy randomness and repre-
sentation and thus augment the performance. How-
ever, these methods against adversarial attacks do not
fit well in defending adversarial patch attacks. Since
the noise is concentrated on a small patch area, it is
unnecessary and in conductive to apply a filter onto
the whole image. On the contrary, we believe a de-
fense mechanism consisting of detection and defense
stage will be more effective against adversarial patch
attacks. In this paper, we introduce an evolved de-
fensive scheme based on a previous work called Lo-
cal Gradient Smoothing (Naseer et al., 2019) to detect
and remove adversarial noises according to the result
of an attack-region proposing module. This method
does not require changing either the architecture of
the deep neural network or the parameters. Instead, it
works in the preprocessing stage that modifies input
data with some smoothing mechanisms. The contri-
butions of this paper can be summarized as follows:
1) By investigating the adversarial phenomena, we
visualize how the perception of the deep model
changes while given an adversarial sample in con-
trast to a normal input, also showing how differ-
ent CNN architectures and different experimental
settings affect the influence of adversarial attack
methods.
2) Motivated by our baseline method (Naseer et al.,
2019), which proposes a strategy called Local
Gradients Smoothing (LGS). LGS first estimates
the region of interest in the input image of adver-
sarial noise and then performs gradient smoothing
against it. We raise its performance by incorporat-
ing the information of deep visual features, which
is also called the saliency map.
3) We propose two different algorithms: Saliency-
map-based Local Gradients Smoothing (SLGS)
and Weighted Local Gradients Smoothing
(WLGS). Both methods outperform the baseline
method and other top methods such as image
filtering mechanisms, JPEG compression, and
digital watermarking (DW) (Hayes, 2018).
Figure 1: Example images with VGG16 (Simonyan and
Zisserman, 2014) classification result and confidence score.
(a) shows the original image sample from (Russakovsky
et al., 2015), (b) is the adversarial sample generated by
LaVAN (Karmon et al., 2018), (c) represents the result of
Saliency-map-based Local Gradients Smoothing (SLGS),
and (d) is the result of Weighted Local Gradients Smooth-
ing (WLGS). As illustrated, both proposed methods suc-
cessfully turned the classification result into the correct la-
bel.
2 RELATED WORKS
2.1 Attack Method
Traditional adversarial attack methods aim to find ad-
versarial samples by adding some noise to original
inputs. Goodfellow et al. (Goodfellow et al., 2015)
propose a fast and strong method to find adversarial
examples. Papernot et al. (Papernot et al., 2016a) use
the saliency map to explain how adversaries are gen-
erated and bring up an attack accordingly. The search
for adversarial examples can be formulated as finding
a solution x0 to the following equation:
F (y = ¯y|x0)
subject tokx − x0k
p
≤ ε
(1)
where x0 is the image sample with adversarial noise
added onto the original image x. Instead of limiting
the size of the noise, it restrains the magnitude of the
sum of the noise within a threshold ε. The objective
function of targeted attack is to make the prediction
result of an image classifier F fall into a specific tar-
get class ¯y, while the value of perturbation remains
within a threshold. Non-targeted attack is formulated
by making the output become any class other than the
original label; hence it is considered easier to achieve
than the targeted attack.
Researchers of Adversarial Patch (Brown et al.,
2017) find adversarial examples created using the
methodology presented in the above equation cannot
be used in physical world attacks because adversarial
noise loses its effect under different camera angles,
rotations, and lighting conditions. Brown et al. use a
Enhanced Local Gradient Smoothing: Approaches to Attacked-region Identification and Defense
255

variant of the Expectation over Transformation (EoT)
framework to create dependent robust noise patches
confined to a small region that can be printed and
placed in real-world scenarios to cause misclassifica-
tions. They design a patch operator A(p, x, l, t) for a
given image x, patch p, location l and a set of transfor-
mations t. The adversarial patch is obtained by solv-
ing the following optimization problem:
p0 = max
p
E([F( ¯y|A(p, x, l, t))]) (2)
During optimization, patch operator A applies a
set of transformations to the patch p and then projects
it onto the image x. Finally, the patch p0 has the great-
est expectation over transformations.
Furthermore, LaVAN (Karmon et al., 2018) con-
fines adversarial noise δ to a small region, usually
away from the salient object in an image. Instead of
training the noise to either maximize the probability
of the target class or to minimize the probability of
any other class, they use a loss function to achieve
both:
x0 = (1 − m) x + m δ
argmax
δ
[M(y = ¯y|x0) − M(y = ˆy|x0)]
(3)
where M represents the activations prior to the final
softmax layer in the network, ¯y is the target class, and
ˆy is the source class. After training, it uses a spa-
tial mask m to replace the small area with noise, as
opposed to noise addition performed in traditional at-
tacks.
2.2 Defense Method
In the defensive phase, there are also two main cate-
gories: proactive and reactive defense. Proactive de-
fense methods aim to make the model robust to adver-
sarial samples by adjusting the training process. Ad-
versarial Training (Shaham et al., 2015) includes ad-
versarial samples as training data, which reduces the
impact of adversarial perturbations. This data aug-
mentation also leads to a more stable model. De-
fensive Distillation (Papernot et al., 2016b) applies
the technique of knowledge distillation. The process
starts by training a teacher network that will gener-
ate soft labels, then trains a student network to fit
the soft label, which is also the teacher’s probabil-
ity distribution. The student network is the network
that will be used for inference. This method leads
to a smoother decision boundary, making adversar-
ial samples harder to be found by attackers. Car-
lini et al. (Carlini and Wagner, 2017) then propose a
stronger attack against Defensive Distillation (Paper-
not et al., 2016b). Inspired by (Carlini and Wagner,
2017), Papernot et al. (Papernot and McDaniel, 2017)
modify the original mechanism soon. The reactive
defense method, also called transformation-based de-
fense, focuses on detecting and removing adversarial
noises on images before feeding them into convolu-
tion networks. This sort of method does not require
changing any of the DNN architectures. For example,
there are works studying reducing noise with JPEG
and JPG compression (Das et al., 2018) (Dziugaite
et al., 2016). Feature Squeezing (Xu et al., 2017)
applies image filtering techniques, including median
filtering and Gaussian filtering to resist adversarial at-
tacks. Digital Watermarking(DW) (Hayes, 2018) first
introduces using the saliency map to detect and de-
fend against attackers. Our baseline method lies un-
der this category. In this paper, we improve one of the
most successful methods: Local Gradients Smooth-
ing (Naseer et al., 2019) by adding another noise de-
tection mechanism in the preprocessing stage. LGS
observes adversarial noise as high-frequency noise,
which can be detected by calculating local gradients.
Details are to be discussed in the next section.
2.3 Baseline Method: Local Gradients
Smoothing: Defense against
Localized Adversarial Attacks
Previous attacks (Brown et al., 2017) (Karmon et al.,
2018) introduce high-frequency noise concentrated at
a particular image location, and such noise becomes
very prominent in the image gradient domain. It
can be observed by the image characteristics of the
patch. The effect of such adversarial noise can be
reduced significantly by suppressing high-frequency
regions without affecting the low-frequency image ar-
eas. LGS proposed a method by projecting a gradient
magnitude map onto the image.
LGS obtains the gradient magnitude map by es-
timating the first-order local image gradient of each
pixel, which is calculated by the first-order partial dif-
ferential of others pixels along in x and y axis. The re-
gions with stronger gradients have a higher likelihood
of being the perturbed areas. The gradient is obtained
by the image’s characteristics only. Hence, they do
not provide significant information for the final clas-
sification result. Approaches to estimate the region’s
contribution to the predicted result will be discussed
in the later section. The local gradient of each pixel x
is computed as follows:
∇x(a, b) =
s
(
∂x
∂a
)
2
+ (
∂x
∂b
)
2
(4)
where a and b denotes the horizontal and vertical di-
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
256

rections in the image plane.
They then divide the gradient magnitude map into
K blocks of the same sizes and apply a threshold to
decide whether to keep or remove the block. If the to-
tal value of the local gradient within a block does not
exceed the threshold, the block will be masked out to
zero on the gradient magnitude map. After normal-
ization, the gradient magnitude map g(x) is then used
to suppress the high-frequency parts by performing
“smoothing” to input image:
T (x) = x (1 − λ ∗ g(x)) (5)
where T (x) is the result after LGS transformation,
denote element-wise multiplication of two matrices,
and λ is the smooth factor.
3 APPROACH
According to Local Gradients Smoothing
(LGS) (Naseer et al., 2019), one of the impor-
tant control factors is λ, the smoothing factor for
LGS. The smoothing factor decides how much
information will be removed on those regions that are
considered perturbed. Even though LGS masked out
blocks with gradient magnitude below a particular
threshold, it still becomes a trade-off between clean
images and perturbed images in accuracy. If λ is too
small, the defense would fail to smooth out adver-
sarial noises. In large λ cases, LGS could remove
noises but could also remove too much ground-truth
information at the same time, which would lead to
an unexpected result. The image classifier could
classify the image into another class instead of the
ground-truth or the attacking target.
We believe it is necessary to locate the adversar-
ial noises with higher precision, not only from image-
level information but also from what the classifier had
perceived, to make the smoothing process more accu-
rate.
A mathematically clean way of locating “impor-
tant” pixels is to construct a sensitivity map—also
called saliency map—obtained by differentiating
class activation function S with respect to input x. The
saliency map M represents how much difference a
tiny change in each pixel of x would make to the clas-
sification score for class c. The sensitivity map of a la-
bel will be highly correlated to regions where that la-
bel is present. In practice, the approach is widely used
for the visualization of CNNs. Here we refer to the
implementation of constructing Saliency Maps (Si-
monyan et al., 2013):
M
c
(x) =
∂S
c
∂x
(6)
where M represents the saliency map with the same
shape of the input image, and S
c
is the final class ac-
tivation function of the image classifier.
We design a slightly different version of the sen-
sitivity map. Since the effect of attacks is not always
guaranteed, the target class may not be predicted as
the only possible class; thus it may not be the promi-
nent part on the sensitivity map. Instead of using the
whole class score, we thereby design a loss function
calculating the cross entropy of the top 5 classes.
In most cases where adversarial samples success-
fully fooled the classifier, we will find out that the
sensitivity map and the local gradient map highlights
different areas but both cover areas where the adver-
sarial sample is located. One of the na
¨
ıve thoughts
is to find the overlapping areas of the two approaches
mentioned above. We propose two ways of integrat-
ing the sensitivity map and the local gradient map to
boost up the accuracy of the attacked-region proposal.
In this paper, we apply the same local gradient map
g(x) presented in LGS (Naseer et al., 2019).
Saliency-map-based Local Gradients Smoothing
(SLGS): we take the primary parts of the saliency
map to perform gradient smoothing, the rest will be
ignored. One possible problem of the saliency map is
that even when there is apparent noise, the pixels are
still scattered. To complete a mask, we take a thresh-
old to binarize the saliency map:
M
x,y
=
(
1, if M
x,y
≥ threshold
0, otherwise
(7)
where the threshold is designed as the mean value of
the saliency map M obtained by Eq. 6 in our experi-
ments.
Then we use a combination of erosion and dila-
tion to remove small empty “holes” and clear outliers.
Finally, we multiply element-wise the local gradient
map with the updated saliency mask. If a pixel has a
negative value of the mask, the gradient will be zeroed
out. The operators of binary erosion E and dilation D
based on the binary mask obtained by Eq. 7 with the
kernel size 3 for every pixel (i, j) are defined as fol-
lows:
E(i, j) = M(i, j) ∩ (M(i − 1, j − 1) ∪ M(i − 1, j)
M(i − 1, j + 1) ∪ M(i, j − 1) ∪ M(i, j + 1)
M(i + 1, j − 1) ∪ M(i + 1, j) ∪ M(i + 1, j + 1))
(8)
D(i, j) = E(i, j) ∪ E(i − 1, j − 1) ∪ E(i − 1, j)
E(i − 1, j + 1) ∪ E(i, j − 1) ∪ E(i, j + 1)
E(i + 1, j − 1) ∪ E(i + 1, j) ∪ E(i + 1, j + 1)
(9)
Enhanced Local Gradient Smoothing: Approaches to Attacked-region Identification and Defense
257
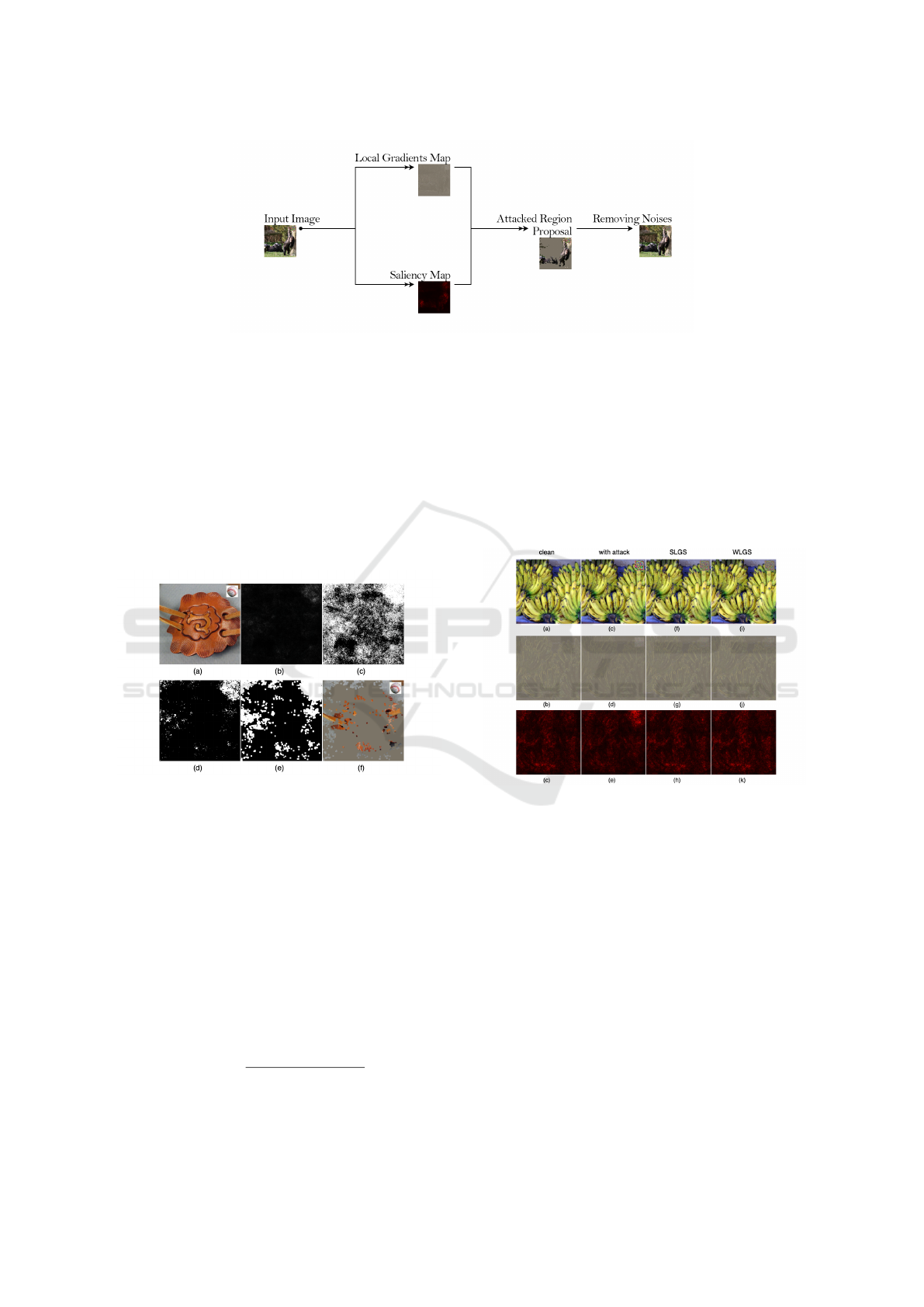
Figure 2: Defense Mechanism.
where ∩ denotes the logical and, i.e.intersection oper-
ation and ∪ denotes the union. In our experiments, we
apply two times of erosion followed by three times of
dilation to form a mask. We then perform the smooth-
ing operation based on the element-wise multiplica-
tion of the final dilated mask D(x) along with the local
gradient map g(x) as Eq. 10:
T (x) = x (1 − λ ∗ D(x) g(x)) (10)
where denotes the element-wise multiplication of
two matrices, and λ is a scaling factor, which controls
the intensity of eliminating noises.
Figure 3: Steps for attacked-region proposal using saliency
map. (a) is the original image, (b) represents the saliency
map, (c) is the binary mask of (b), (d) is the mask after
erosion, (e) shows (d) after dilation, and (f) illustrates the
selected regions. The gray areas will be considered as non-
attacked parts.
Weighted Local Gradients Smoothing (WLGS):
there are times when the local gradient map and sen-
sitivity map do not reach an agreement on candidate
regions. Hence, we simply use the saliency map as
the weight matrix for local gradients. The saliency
map varies within a large range, so we normalize it
for consistency among all samples using the follow-
ing equation:
W (x) =
M(x) − M(x)
min
M(x)
max
− M(x)
min
(11)
where we take the normalized map W as the weight
matrix, representing the possibility of containing ad-
versarial noise in each pixel. The final gradient map is
obtained by re-weighting the local gradient map with
the weight matrix as Eq. 12:
T (x) = x (1 − λ ∗ (M(x) ∗ g(x))) (12)
We set the local gradient map threshold = 0.2 and
the saliency map threshold = mean value of the map
and searched a wide range of smooth factors in our
experiments. We further discuss and demonstrate the
advantages of SLGS and WLGS in later sections.
Figure 4: Visualizing changes of the local gradient map and
the saliency map. The first row shows the image in human
perception, the second row is the local gradient map, and
the third row illustrates the saliency map.
4 EXPERIMENT
4.1 Experiment Setup
Our proposed methods are evaluated on artificially
created adversarial masks (Brown et al., 2017) (Kar-
mon et al., 2018) added on ImageNet ILSVRC-
2012 (Simonyan and Zisserman, 2014) dataset. To
compare our methods to the baseline method, we
use identical experimental settings and parameters on
both works. Our experiments can be separated into
two parts: training and testing. For adversarial patch
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
258

generation and Local Gradients Smoothing reproduc-
tion, we refer to the code source: https://github.com\
/metallurk\/local\ gradients\ smoothing.
Training: This part aims to reproduce the results of
Adversarial Patch and LaVAN attacks, creating ro-
bust targeted adversarial patches in the white box set-
ting. Both were trained and validated with the Ima-
geNet ILSVRC 2012 training set with 1000 classes
and more than 1281k images in our experiments on a
single GeForce RTX-2080-ti GPU. Two pre-trained
models, VGG16 (Simonyan and Zisserman, 2014)
and InceptionV3 (Szegedy et al., 2016) were utilized
respectively to experiment on the attack mechanisms.
We use Pytorch (Paszke et al., 2019) framework and
load the pre-trained architecture and weights from
Torchvision. Instead of changing the model weights,
we fix the weights and optimize the patch in input im-
ages by stochastic gradient descent with momentum.
We use the same hyperparameters for both attacks:
Due to the limitation of memory, we set the batch
size to 20 and train size to 50, which means for each
epoch, we sample a new collection of 20*50=1000
images from the dataset. The learning rate is 1 for
the first 160 epochs and then decay to 0.1 for 20
epochs, lastly 0.01 for the last 20 epochs, with a total
of 200 epochs. Before feeding images into networks,
we normalize and resize input images to 400x400
size. Three LaVAN masks with size 42x42 (≈1% of
the image), 52x52 (≈1.7% of the image), and 60x60
(≈2.2% of the image) were applied. For Adversarial
Patch, the patch size is 90x90(≈5% of the image).
Testing: To show the improvement of our methods,
we apply the same patch attacks as stated above onto
a subset consisting of 5000 samples from ImageNet
ILSVRC 2012 validation set, which originally has
50000 images in total, and then exploit our proposed
methods and the baseline method to defend against
the attack. For deducing the inconsistency and avoid-
ing the patch covering the salient objects, we always
place the patch on the top-right corner with 10 pixels
away from the corner. Lastly, we simply use top-1
accuracy as the evaluation matrix.
4.2 Experiment Results
For the smoothing factor λ, we found that it is not easy
to give the most suitable value, as different attack-
ers lead to different results, so we searched through
a wide range of lambdas. Table 1 demonstrates the
effect of our proposed method defending against La-
VAN attacks on VGG16, comparing them to the base-
line method with various lambdas. As shown in
Fig. 5, Saliency-map-based Local Gradients Smooth-
ing (SLGS) has significant improvements from Lo-
cal Gradients smoothing (LGS), while Weighted Lo-
cal Gradients Smoothing (WLGS) is comparable to
LGS. This is due to the addition of an attacked-region
proposing mechanism to the initial algorithm that re-
duces the probability of false smoothing without sac-
rificing its capability to smooth out most attacks. As
in Fig. 5, we measure the results for both scenar-
ios, with and without attackers, and for readability,
we only take into account the average result for each
scheme.
Table 1: Summary of VGG16 performance against La-
VAN attack with and without defenses including Local Gra-
dients smoothing (LGS), Saliency-map-based Local Gra-
dients Smoothing (SLGS), and Weighted Local Gradients
Smoothing (WLGS). Bold numbers represent the best accu-
racy of a certain defense against LaVAN attack. Underlined
numbers represent the best accuracy of a method among all
smooth factors.
Model VGG16
Patch Size - 42
(1%)
52
(1.7%)
60
(2.2%)
No Defense 72.24 0.32 0.48 0.33
LGS(λ=3.5) 64.28 62.32 59.26 54.10
LGS(λ=2.7) 67.74 60.92 50.70 37.98
LGS(λ=2.3) 68.64 55.60 36.48 20.74
WLGS(λ=3.5) 65.42 54.36 63.08 50.12
WLGS(λ=2.7) 67.38 53.02 60.14 47.98
WLGS(λ=2.3) 68.64 51.88 58.68 46.30
SLGS(λ=3.5) 68.20 66.50 63.10 57.08
SLGS(λ=2.7) 69.64 63.68 53.04 39.18
SLGS(λ=2.3) 70.48 57.26 37.70 21.50
Figure 5: Visualizing average top-1 accuracy defending La-
VAN attack on VGG16 with different lambda values among
LGS, SLGS, and WLGS. Patch Size = 52x52. In WLGS
clamp, we clip the value of normalized saliency in (0,1).
Patch Size = 52x52. Left: accuracy with and without at-
tack. Right: average accuracy with and without attack.
As demonstrated in Table 2, which shows the ef-
fect of our proposed method defending against La-
VAN attack on InceptionV3, our proposed methods
do not show any notable improvement as on VGG16,
yet still comparable. The primary reason for the dif-
ference is the dependency on the precision of the
Enhanced Local Gradient Smoothing: Approaches to Attacked-region Identification and Defense
259

attacked-region proposal. As InceptionV3 originally
shows more robustness against adversarial samples
without any defenses, the success rate of the targeted
attack drops significantly. Table 3 and 4 shows the re-
sult of our proposed method defending against Adver-
sarial attack on VGG16 and InceptionV3 respectively.
The enhancement of SLGS is still over 1.5 percent in
both scenarios, while WLGS drops a lot. We will il-
lustrate some outcomes to show the effect and related
explanations in the subsequent experimental discus-
sion.
Table 2: Summary of InceptionV3 performance against La-
VAN attack with and without defenses.
Model InceptionV3
Patch Size - 42
(1%)
52
(1.7%)
60
(2.2%)
No Defense 78.70 12.36 9.96 5.92
LGS(λ=2.3) 77.66 77.40 77.18 76.98
LGS(λ=1.9) 77.88 76.88 77.18 74.70
LGS(λ=1.5) 78.16 71.08 72.26 55.06
WLGS(λ=2.3) 77.46 75.50 77.34 77.22
WLGS(λ=1.9) 78.26 72.20 77.00 75.36
WLGS(λ=1.5) 78.26 64.46 73.64 65.34
SLGS(λ=2.3) 77.88 77.26 77.32 76.82
SLGS(λ=1.9) 78.32 75.88 76.98 74.54
SLGS(λ=1.5) 78.46 68.00 72.12 54.94
Table 3: Summary of VGG16 performance against Adver-
sarial Patch attack with and without defenses. λ=3.5
Model Name VGG16
Method - LGS WLGS SLGS
No Attack 71.70 64.34 64.82 67.38
With Attack 0.12 60.88 24.02 63.36
Table 4: Summary of InceptionV3 performance against Ad-
versarial Patch attack with and without defenses. λ=3.5
Model Name InceptionV3
Method - LGS WLGS SLGS
No Attack 79.56 76.64 77.30 77.38
With Attack 0.10 75.92 65.36 76.46
To emphasize the improvement of our proposed
methods compared to the baseline method under the
situation where we successfully decrease the extent of
smoothing out the ground-truth object, we measured
the difference between the input image and the result
after image-preprocessing using structural similarity
from scikit-image. We conduct experiments on a set
of 1000 images computing the average similarity in-
dex between the original input and the output of each
method. As a result, the average similarity index of
LGS is 0.971, SLGS is 0.987, and WLGS is 0.981.
Fig. 6 visualizes the structural difference of cases in
that LGS will wrongly classify the image. At the same
time, SLGS and WLGS give the correct result, show-
ing our methods can obtain the same or higher perfor-
mance when making fewer changes to the input data.
Figure 6: Structural difference between the input image and
the result after image-preprocessing.
We examine hundreds of failed cases with our de-
fense methods in the experiments and thus find out
those failed cases mostly fall into two scenarios: the
image classifier having low confidence with its out-
put or the image classifier already wrongly classified
the original input image. Even though our methods
work on reducing the possibility of removing ground-
truth information with an attacked-region proposal, it
is still inevitable to wrongly remove some parts from
the image. In the cases shown in Fig. 7, after losing
some saliency, the probability of distribution of the
final softmax layer could be smoothened, which indi-
cates that other classes would have higher chances to
overtake the ground-truth label. Adversarial Defense
by Restricting the Hidden Space of Deep Neural Net-
works (Mustafa et al., 2019) provides an intriguing
solution to this problem.
4.3 Experiment Discussion
Performance Dependency. As LGS depends on the
significant parts of the local gradient map, our method
strongly depends on the perception of the classifica-
tion model, e.g., saliency map. As long as the attack
succeeds, we can assume the interest of the classifier
will focus around at the patch itself. Based on our ex-
periments, the strongest patch (baseball) reaches over
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
260

Figure 7: Illustrating failed cases of our methods.
99 percent of the success rate on VGG16. In contrast,
if the attack is not as successful, or if the model is
robust to such attack methods, the effect of our pro-
posed method could be deduced. Our research shows
that Inception-v3 has stronger robustness than other
models, including VGG16, ResNet101 (He et al.,
2016), and GoogLeNet (Szegedy et al., 2015) under
the same attacks. Patch size also affects the perfor-
mance greatly. As we take the “primary” part of the
saliency map in both SLGS and WLGS, we do not
specify how large the proposed region should cover.
Since Adversarial Patch (≈5%) attack covers more
size than LaVAN (up to 2.2%), WLGS has relatively
bad performance with a smaller smooth factor, com-
pared to other methods. This phenomenon leads to
another question: how to choose a suitable smooth
factor? In regards to this, we propose a possible so-
lution to the problem: estimate the patch size using
the local gradient map. Since LGS discussed the cor-
relations between patch attacks and high-frequency
noises, we can calculate the area occupied by the
high-frequency noises and thus adjust the smooth fac-
tor automatically.
Initialization of Patch. The success of Local Gra-
dients Smoothing (LGS) scheme is based on the ob-
servation that attacks introduce concentrated high-
frequency changes at a particular image location.
However, we have found that there is a significant
reduction of the high-frequency changes as we ini-
tialize the patch with an image similar to the target
class instead of random noise before starting training.
Our image-initialized version of patches also achieves
a smaller loss than the random-initialized ones under
the same experimental settings. Fig. 8 illustrates base-
ball patches with and without initialization.
Figure 8: Left: baseball patch without initialization. Right:
baseball patch initialized with a similar image.
Computational Cost. The computational burden for
our methods is that we pass the input data into the
deep model two times. At the first pass, we feed input
into the classifier and calculate the partial derivative
through backward propagation. After the smoothing
process, we then pass the preprocessed image into the
network for inference. Fig. 9 shows the runtime of
defense methods to process 5000 samples. Follow-
ing the baseline, we use JPEG compression from Pil-
low, Gaussian Filter (GF) and Median Filter (MF),
Bilateral Filter (BF), and Total Variance Minimiza-
tion (TVM) from scikit-learn under python3.6 envi-
ronment.
Figure 9: Comparison of the computational cost processing
5000 images from ImageNet ILSVRC-2012 validation set.
The Histogram is in log scale with actual run time on top of
each bar.
White-box Attack. Our empirical results show that
even when the attacker is aware of our defense mecha-
nism, our proposed methods remain robust. We revise
the optimization problem of LaVAN attack and train
it again, where all the experimental settings remain:
x0 = (1 − m) x + m δ
argmax
δ
[M(y = ¯y|T (x0)) − M(y = ˆy|T (x0))]
(13)
where M represents the activations prior to the final
softmax layer in the network, ¯y is the target class
and ˆy is the source class, and T is a reactive defense
transformation between LGS, SLGS, and WLGS. As
a result, LaVAN attack can not produce an effec-
tive adversarial patch, as shown in Fig. 10. In-
stead of applying a filter to the whole (input) im-
age, LGS/SLGS/WLGS methods would eliminate the
salient area beforehand. The area that will be affected
Enhanced Local Gradient Smoothing: Approaches to Attacked-region Identification and Defense
261

might change due to the different input data or the ran-
dom position of the patch. This will produce multiple
patterns instead of just one specific pattern that the
model can easily learn from. The objective function
for LaVAN’s training is formulated as minimizing the
distance between the output and the target class and
also maximizing the distance between the output class
and the source class at the same time. Since it can not
minimize the value of the former unit, it turns out to
maximize the value of the latter and set the patch to
zero.
Figure 10: The success rate of white-box attacks.
5 CONCLUSION REMARKS
5.1 Conclusion
In this work, we propose two revisions of Lo-
cal Gradients Smoothing (LGS) methods, Saliency-
map-based Local Gradients Smoothing (SLGS) and
Weighted Local Gradients Smoothing (WLGS), to de-
tect possible adversarial patches and to remove such
noises accordingly. We attempt to interpret how an
adversarial attack affects from the perspective of the
deep model, i.e., the saliency map, thereby propos-
ing an algorithm integrating the saliency map with
original methods. By locating the adversarial noises
with higher precision, SLGS surpasses the baseline
method by over 1.5% on both clean and attacked data
on VGG16, and WLGS is a more stable solution for
addressing adversarial defense in a wider range of
smooth factors. Since our proposed methods require
two stages, the performance is positively correlated
to the success rate of attacks. As the success of our
method is based on the accurate attacked region de-
tection, it requires the noise to have an impact that is
strong enough for the classification model. Hence, in
the cases of stronger attackers (or less robust mod-
els), our proposed algorithms can show more im-
provements. Lastly, we experiment with our proposed
methods on the ImageNet ILSVRC 2012 dataset. The
advantages of this work have been seen by experi-
ments with LaVAN and Adversarial Patch attacks on
both VGG16 and InceptionV3 models.
5.2 Future Work
In this work, we apply the saliency map due to its
simple implementation. Apart from the saliency map,
there are some other works trying to explain or in-
terpret CNN models, including Local Interpretable
Model-agnostic Explanations (LIME) (Ribeiro et al.,
2016), SmoothGrad (Smilkov et al., 2017) and Inte-
grated Gradients (Sundararajan et al., 2017). We ex-
pect the techniques of understanding deep models can
contribute to detection and defense against adversar-
ial attacks.
In the future, we hope that the proposed methods
can be applied with existing applications in computer
vision fields as a mask before inputs are fed into deep
models. By adding another detecting module that will
give an adversarial score to decide whether there is
an attacker and how powerful it could possibly be,
we expect the system to adjust the smooth factor λ
based on the information automatically. In conclu-
sion, we hope to achieve a real-scene, real-time, and
parameter-free improved resolution.
REFERENCES
Brown, T. B., Man
´
e, D., Roy, A., Abadi, M., and
Gilmer, J. (2017). Adversarial patch. arXiv preprint
arXiv:1712.09665.
Carlini, N. and Wagner, D. (2017). Towards evaluating the
robustness of neural networks. In 2017 ieee sympo-
sium on security and privacy (sp), pages 39–57. IEEE.
Das, N., Shanbhogue, M., Chen, S.-T., Hohman, F., Li, S.,
Chen, L., Kounavis, M. E., and Chau, D. H. (2018).
Shield: Fast, practical defense and vaccination for
deep learning using jpeg compression. In Proceed-
ings of the 24th ACM SIGKDD International Confer-
ence on Knowledge Discovery & Data Mining, pages
196–204.
Dziugaite, G. K., Ghahramani, Z., and Roy, D. M. (2016). A
study of the effect of jpg compression on adversarial
images. International Society for Bayesian Analysis
(ISBA).
Goodfellow, I. J., Shlens, J., and Szegedy, C. (2015). Ex-
plaining and harnessing adversarial examples. In Ben-
gio, Y. and LeCun, Y., editors, 3rd International Con-
ference on Learning Representations, ICLR.
Hayes, J. (2018). On visible adversarial perturbations &
digital watermarking. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recog-
nition Workshops, pages 1597–1604.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Huval, B., Wang, T., Tandon, S., Kiske, J., Song, W.,
Pazhayampallil, J., Andriluka, M., Rajpurkar, P.,
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
262

Migimatsu, T., Cheng-Yue, R., et al. (2015). An em-
pirical evaluation of deep learning on highway driv-
ing. arXiv preprint arXiv:1504.01716.
Karmon, D., Zoran, D., and Goldberg, Y. (2018). Lavan:
Localized and visible adversarial noise. In Interna-
tional Conference on Machine Learning, pages 2507–
2515. PMLR.
Lee, M. and Kolter, Z. (2019). On physical adversarial
patches for object detection. ICML Workshop on Se-
curity and Privacy of Machine Learning.
Li, R., Zhang, H., Yang, P., Huang, C.-C., Zhou, A., Xue,
B., and Zhang, L. (2021). Ensemble defense with data
diversity: Weak correlation implies strong robustness.
arXiv preprint arXiv:2106.02867.
Liu, X., Yang, H., Song, L., Li, H., and Chen, Y. (2019).
Dpatch: Attacking object detectors with adversarial
patches. AAAI Workshop on Artificial Intelligence
Safety.
Madry, A., Makelov, A., Schmidt, L., Tsipras, D., and
Vladu, A. (2018). Towards deep learning models re-
sistant to adversarial attacks. In International Confer-
ence on Learning Representations.
Mustafa, A., Khan, S., Hayat, M., Goecke, R., Shen, J., and
Shao, L. (2019). Adversarial defense by restricting the
hidden space of deep neural networks. In Proceedings
of the IEEE/CVF International Conference on Com-
puter Vision, pages 3385–3394.
Naseer, M., Khan, S., and Porikli, F. Local gradients
smoothing: Defense against localized adversarial at-
tacks. In 2019 IEEE Winter Conference on Applica-
tions of Computer Vision (WACV), pages 1300–1307.
Papernot, N. and McDaniel, P. (2017). Extending defensive
distillation. arXiv preprint arXiv:1705.05264.
Papernot, N., McDaniel, P., Jha, S., Fredrikson, M., Celik,
Z. B., and Swami, A. (2016a). The limitations of deep
learning in adversarial settings. In 2016 IEEE Euro-
pean symposium on security and privacy (EuroS&P),
pages 372–387. IEEE.
Papernot, N., McDaniel, P., Wu, X., Jha, S., and Swami,
A. (2016b). Distillation as a defense to adversarial
perturbations against deep neural networks. In 2016
IEEE symposium on security and privacy (SP), pages
582–597. IEEE.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., et al. (2019). Pytorch: An imperative style,
high-performance deep learning library. Advances
in neural information processing systems, 32:8026–
8037.
Ribeiro, M. T., Singh, S., and Guestrin, C. (2016). ” why
should i trust you?” explaining the predictions of any
classifier. In Proceedings of the 22nd ACM SIGKDD
international conference on knowledge discovery and
data mining, pages 1135–1144.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M., et al. (2015). Imagenet large scale visual
recognition challenge. International journal of com-
puter vision, 115(3):211–252.
Shaham, U., Yamada, Y., and Negahban, S. (2015). Under-
standing adversarial training: Increasing local stabil-
ity of neural nets through robust optimization. arXiv
preprint arXiv:1511.05432.
Shao, R., Shi, Z., Yi, J., Chen, P.-Y., and Hsieh, C.-J.
(2021). Robust text captchas using adversarial exam-
ples. arXiv preprint arXiv:2101.02483.
Shi, C., Xu, X., Ji, S., Bu, K., Chen, J., Beyah, R., and
Wang, T. (2021). Adversarial captchas. IEEE Trans-
actions on Cybernetics.
Simonyan, K., Vedaldi, A., and Zisserman, A. (2013).
Deep inside convolutional networks: Visualising im-
age classification models and saliency maps. arXiv
preprint arXiv:1312.6034.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Smilkov, D., Thorat, N., Kim, B., Vi
´
egas, F., and Watten-
berg, M. (2017). Smoothgrad: removing noise by
adding noise. arXiv preprint arXiv:1706.03825.
Su, J., Vargas, D. V., and Sakurai, K. (2019). One pixel at-
tack for fooling deep neural networks. IEEE Transac-
tions on Evolutionary Computation, 23(5):828–841.
Sundararajan, M., Taly, A., and Yan, Q. (2017). Axiomatic
attribution for deep networks. In International Confer-
ence on Machine Learning, pages 3319–3328. PMLR.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2015). Going deeper with convolutions.
In Proceedings of the IEEE conference on computer
vision and pattern recognition, pages 1–9.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wo-
jna, Z. (2016). Rethinking the inception architecture
for computer vision. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2818–2826.
Thys, S., Van Ranst, W., and Goedem
´
e, T. (2019). Fooling
automated surveillance cameras: adversarial patches
to attack person detection. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition Workshops, pages 0–0.
Xu, W., Evans, D., and Qi, Y. Feature squeezing: Detecting
adversarial examples in deep neural networks. pages
18–21.
Enhanced Local Gradient Smoothing: Approaches to Attacked-region Identification and Defense
263
