
LIMP: Incremental Multi-agent Path Planning with LPA*
M
¨
ucahit Alkan Yorgancı
1
, Fatih Semiz
1,2
and Faruk Polat
1
1
Middle East Technical University, Computer Engineering Department, Ankara, Turkey
2
Aselsan Inc. Defense Systems Technologies Business Sector, Ankara, Turkey
Keywords:
AI, Multi-agent, Pathfinding, MAPF, Incremental Planning.
Abstract:
The multi-agent pathfinding (MAPF) problem is defined as finding conflict-free paths for more than one agent.
There exist optimal and suboptimal solvers for MAPF, and most of the solvers focus on the MAPF problem
in static environments, but the real world is far away from being static. Motivated by this requirement, in this
paper, we introduce an incremental algorithm to solve MAPF. We focused on discrete-time and discrete space
environments with the unit cost for all edges. We proposed an algorithm called incremental multi-agent path
planning with LPA* (LIMP) and discrete lifelong planning A* (DLPA*) for solving I-MAPF (Incremental
MAPF). LIMP is the combination of two algorithms which are the Conflict Based Search D*-lite (CBS-D*-
lite) (Semiz and Polat, 2021) and DLPA*. DLPA* is just a tailored version of the lifelong planning A* (Koenig
et al., 2004) which is an incremental search algorithm for one agent. We have shown that LIMP outperforms
Conflict Based Search replanner (CBS-replanner) and CBS-D*-lite (Semiz and Polat, 2021) in terms of speed.
Moreover, in terms of cost, LIMP and CBS-D*-lite perform similarly, and they are close to CBS-replanner.
1 INTRODUCTION
The multi-agent pathfinding (MAPF) problem is the
extended version of the classical pathfinding problem
for more than one agent. In the MAPF problem, agent
paths should not conflict. In other words, agents can
not be in the same location at the same time. Semiz
and Polat (Semiz and Polat, 2021) extended the def-
inition of MAPF and came up with a new variant of
MAPF called incremental multi-agent pathfinding (I-
MAPF). In the I-MAPF, the environment can change
during the search; in other words, some paths can be
blocked. This new approach better covers real-world
problems. As the environment is not static in the real
world, environmental changes occur when planning a
path for agents. For example, if we are planning the
routes for cargo delivery trucks, the path costs may
change due to the traffic jams, or some of the paths
might be entirely blocked because of accidents. In
this scenario, classical MAPF algorithms cannot re-
flect these changes efficiently and generally plan the
routes from scratch.
Several algorithms are developed to handle the
environmental changes efficiently for both MAPF
and classical path planning problems such as CBS-
replanner, CBS-D*-lite and LPA*. More algorithms
are pointed at the related work and the background
sections. Conflict Based Search (CBS) is an algo-
rithm that aims to solve the MAPF problem by solv-
ing the conflicts in the agent paths by adding con-
straints (Sharon et al., 2015). CBS-replanner is the
extended version of the CBS that replans the paths af-
ter an environmental change occurs. In this paper, we
proposed two algorithms named incremental multi-
agent path planning with LPA* (LIMP) and DLPA*.
DLPA* is a version of a former incremental pathfind-
ing algorithm lifelong planning A* (LPA*). LIMP
combines DLPA* with Conflict Based Search D*-lite
(CBS-D*-lite). The intuition behind the DLPA* is
that environmental changes (path blocking) generally
affect only the nodes close to the node that the change
occurred. So, the algorithm only re-expands the nodes
near the change, and if the cost of the node changes,
it re-expands the children of this node.
2 RELATED WORK AND
BACKGROUND
2.1 Incremental Pathfinding Algorithms
There are many studies focusing on incremental
single-agent pathfinding in the literature. Lumel-
208
Yorgancı, M., Semiz, F. and Polat, F.
LIMP: Incremental Multi-agent Path Planning with LPA.
DOI: 10.5220/0010824400003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 1, pages 208-215
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
sky and Stepanov (Lumelsky and Stepanov, 1986),
Pinadeh and Snyder (Pirzadeh and Snyder, 1990),
Korf (Korf, 1990) and Zelinsky (Zelinsky, 1992) tried
to use existing information to re-plan the path dy-
namically. Stentz tried to solve the problem by gen-
eralizing the A* algorithm by making it responsive
to environmental changes to use in dynamic envi-
ronments. He developed two algorithms D* (Stentz,
1993) which partially changes the f and g values of
the vertexes when environmental change occurs, and
Focused D*, which is the improved version of the D*
(Stentz, 1995) that focuses on updating the costs to
reduce the number of expanded states. Later, Rama-
lingam came up with an incremental algorithm called
DynamicSWSF-FP (Ramalingam and Reps, 1996) to
solve a similar problem which is a grammar prob-
lem. DynamicSWSF-FP is capable of handling the
arbitrary number of edge insertion, edge deletion, and
cost changes. Koenig (Koenig et al., 2004) combined
A* and DynamicSWSF-FP in Lifelong Planning A*.
He also proposed D*-Lite, which behaves similarly
to D* but algorithmically different. D*-lite is shorter
than the former D*. It includes fewer conditional
branches, which makes it easier to implement and ex-
tend (Koenig and Likhachev, 2002).
Unlike traditional A*, LPA* is capable of han-
dling changes by just expanding the nodes that are
affected by the change. It checks whether the short-
est path from the start to the node is subject to the
edge cost change. The algorithm does that by taking
a minimum of the paths adding edge costs to the par-
ents of the node. If the shortest path is changed, LPA*
updates the node’s g value then marks its children as
their shortest path might also be changed. Child nodes
are pushed to the open list to be expanded later. LPA*
is complete and optimal if the heuristic is consistent
and non-negative.
2.2 MAPF Solvers
MAPF solvers might be optimal, sub-optimal,
reduction-based that reduces the problem to the well-
studied one, centralized or distributed. Solvers may
have different cost functions such as sum-of-costs,
makespan, etc. (Sharon et al., 2015). Standley (Stan-
dley, 2010) proposed an improvement that employs
grouping the agents that do not affect other groups
of agents to reduce the state-space. Later, M* (Wag-
ner and Choset, 2011) which dynamically changes
the branching factor, is released. Sharon et al. de-
veloped Conflict Based Search (Sharon et al., 2015),
and Boyarski et al. (Boyarski et al., 2020) provided
an iterative-deepening variant of CBS that uses LPA*
(instead of A*) to find low-level paths of the agents.
Conflict based search (CBS) is an algorithm that
aims to find an optimal solution for the multi-agent
pathfinding problem. CBS has two levels: low-level
search and high-level search. The low-level search
is a single agent path planning algorithm that is ca-
pable of satisfying some constraints. In the CBS, a
constraint is formulated as a tuple that contains agent
id, location, time information, which indicates that a
given agent cannot be present in the given location
at the given time. High-level search constructs a tree
called a conflict tree to solve the path conflicts be-
tween agents. A CBS node consists of constraints and
planned paths. A conflict occurs when more than one
agent plans to be at the same position at the same time
step. High-level search expands nodes by adding a
constraint to one of the conflicting agents at conflict
position. As it expands the nodes in the increasing
cost order, CBS is known to be complete and optimal.
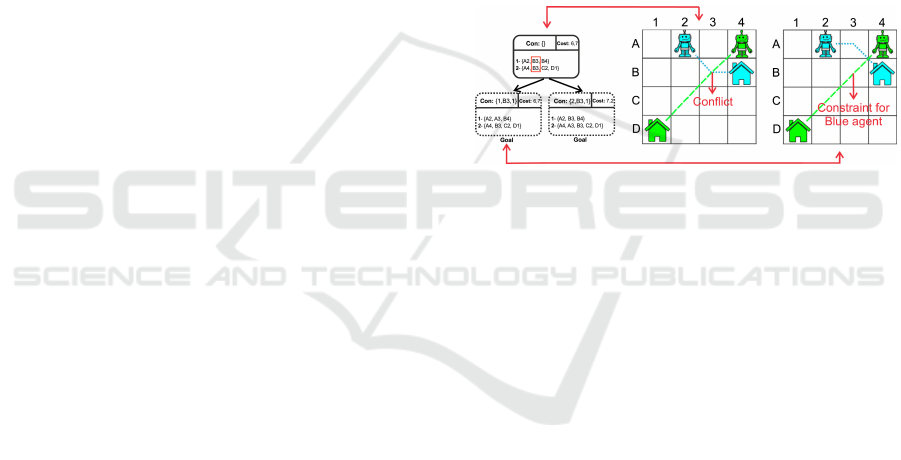
Figure 1: Example run of the CBS with a hypothetical low-
level search. Red lines pair the CBS nodes with the corre-
sponding low-level search result. As can be seen, there is a
conflict at (B,3) when time equals 1. CBS expands the root
by constraining the blue and green agents to present at (B,3)
when time is 1 (Semiz and Polat, 2021).
2.3 Dynamic MAPF
There are few studies that solve the dynamic ver-
sion of the MAPF problem. Murano et al. (Murano
et al., 2015) studied multi-agent pathfinding in a dy-
namic but predictable environment. Atiq et al. (Atiq
et al., 2020) studied a dynamic version of MAPF
in which existing agents may leave and new agents
may join the environment at different times. Wan et
al. (Wan et al., 2018) worked on a lifelong dynamic
MAPF problem where the dynamism of the problem
comes from adding a new agent to the environment.
Semiz and Polat (Semiz and Polat, 2021) worked on
the I-MAPF problem where nodes in the environment
can become temporarily unavailable. They provided
CBS-replanner and CBS-D*-lite solutions. Unlike
classical CBS, when an environmental change occurs,
CBS-D*-lite tries to use a previously constructed con-
flict tree to get the solution faster.
CBS-D*-lite has three stages of handling environ-
mental changes. After an environmental change oc-
curs, CBS-D*-lite starts with its first stage and tries
LIMP: Incremental Multi-agent Path Planning with LPA
209

to find a sub-optimal solution that satisfies some opti-
mization criterion by performing the low-level search
on the goal node of the previously constructed conflict
tree. If it fails to find such a solution, it moves to the
second stage, in which it performs a high-level search
on a tree whose root is the previous goal node. If it
fails again, it just simply constructs the conflict tree
from scratch with the new environment. CBS-D*-lite
uses D*-lite in the low-level search. The algorithm is
complete but not optimal (Semiz and Polat, 2021).
3 INCREMENTAL MAPF WITH
LPA*
The main problem that we are solving is the I-MAPF,
an extended version of the MAPF problem. The input
of the I-MAPF problem consists of:
• A set of k agents {a
0
, ··· , a
k
}
• An undirected unweighted graph G = (V, E)
which represents the environment. In the scope
of this paper we used 4-connected grid world.
• A set of starting vertices {s
0
, ··· , s
k
} where s
i
is
the starting vertex of a
i
.
• A set of goal vertices {g
0
, ··· , g
k
} where g
i
repre-
sents the goal vertex of a
i
• A set of environmental changes E =
{(v
0
,t
0
, ∆
0
), ··· , (v
n
,t
n
, ∆
n
)} where v
i
is the
vertex which will be blocked. t
i
is the time when
the vertex is started to be blocked. Lastly, ∆
i
is
the blocking period of the vertex. To sum up, an
agent can not present at v
i
between t
i
and t
i
+ ∆
i
The output of the I-MAPF problem is set of paths
{P
0
...P
k
} where P
i
is a sequence of vertexes with time
information without conflict or block. Formally, P
i
=
{(v
0
, 0), (v
1
, 1), ··· , (v
i
, i), (v
i+1
,t
i+1
), ··· , (v
m
, m)}
where v
0
is the start vertex of a
i
and v
m
is the goal
vertex of a
i
(i.e., v
0
= s
i
and v
m
= g
i
). Formally, a con-
flict is vertex, time and set of agents tuple c = (v, t, A)
where |A| > 1 ∧ ∀a
i
∈ A(v, t) ∈ P
i
. Blocking occurs
when there is a blocked vertex-time tuple in the
path. Formally, (v, t) is blocked if ∃(v
0
,t
0
, ∆
t
) ∈ E
v
0
= v ∧ t
0
< t < t
0
+ ∆
t
. Lastly, a vertex cannot be
blocked if there exists an agent.
In the high-level search, LIMP uses CBS-D*-lite
as it is. On the other hand, we have developed a mod-
ified version of LPA* named discrete lifelong plan-
ning A* (DLPA*) for the low-level search of CBS-
D*-lite. The new version is simpler, making it easier
to implement and modify. In MAPF, an agent might
wait or come to the same position at different time-
steps to find an optimal solution. Hence, our ver-
sion is working in the discrete time-space domain. In
addition to classical LPA*, our version has the abil-
ity to add constraints beside obstacles. The DLPA*
has four main procedures, which are replan, addCon-
straint, and makeChange, advance.
Algorithm 1: DLPA*.
Require: I-MAPF simulation {Simulation S}
1: changes = S.new environmental changes
2: for change c
i
in changes do
3: makeChange(c i)
4: replan()
5: advance()
Replan is the main procedure of the LIMP (Algo-
rithm 2). Whenever an agent path is needed to be re-
planned, this procedure is called with the former Open
and Closed lists. States of the LIMP contain x coor-
dinate, y coordinate and time information. The parent
of a state is like the parents of a state in the space do-
main, except the time of the parent is one less than the
time of the child; similarly, the time of a child is one
more than the time of the parent. In this way, wait-
ing action can be handled by only advancing the time.
The getParents and getChildren functions return the
set containing the parents and children, respectively.
These functions also check obstacles and constraints
and exclude the ineligible states.
Algorithm 2: Replan.
Require: Path Planning Instance
{OPEN,CLOSED, Goal}
1: while OPEN.notEmpty() AND getPath() =
NULL do
2: S ← OPEN.popHighestPriority() S : {x,y,t
}
3: if getParents(S) = { } then
4: CLOSED.delete(S)
5: for each state s
i
in getChildren(S) do
6: if CLOSED.get(s
i
) then
7: OPEN.add(s
i
)
8: else
9: CLOSED.add(S)
10: for each state s
i
in getChildren(S) do
11: if CLOSED.get(s
i
) = NULL then
12: OPEN.add(s
i
)
13: Return getPath()
LIMP maintains two sets in low-level that are
Open and Closed. Open set stores the states that are
subject to a change and should be examined. Closed
set stores the states that have a path from the start
state. The popHighestPriority function returns the
state with the highest priority with respect to the
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
210
heuristic. In this paper, we used Manhattan distance
as a heuristic. The notEmpty function returns true if
the set is not empty, false otherwise. The add function
adds the given state to the given set. Both Open and
Closed sets are behaving like formal sets, not allow-
ing the duplicates.
The procedure takes states from the Open list until
reaching the goal. The goal state is the state that has
the exact coordinates as the goal location. The get-
Path function returns the path performing a backward
search if the goal is found. As after adding a con-
straint or object, the shortest path cannot be shorter
than the previous shortest path; we first check whether
a path from the goal node to the start node exists; if
so, we return this path. The getPath function can be
implemented as a constant time operation when there
is no path by maintaining the information about the
goal state is found or not. If the popped state has no
parents, that means the state is unreachable. So, it is
deleted from the Closed list. If a state becomes un-
reachable, that may lead its children to become un-
reachable, so children of the deleted state are pushed
to the open list. If a state becomes reachable, its chil-
dren are also pushed to the Open list to be expanded
further if they are not on the Closed list.
Algorithm 3: addConstraint.
Require: {OPEN, CLOSED, Constraint }
1: CLOSED.delete(Constraint)
2: OPEN.delete(Constraint)
3: for each state s
i
in getChildren(Constaint) do
4: if CLOSED.get(s
i
) then
5: OPEN.add(s
i
)
Adding constraint to the LIMP is relatively simple
(Algorithm 3). The constrained state is deleted from
the closed set and its children are pushed to the open
list as they might be unreachable.
Algorithm 4: makeChange.
Require: {OPEN, CLOSED, Position, t, ∆
t
}
Position : { x, y}
1: i← t
2: while i ≤ t + ∆
t
do
3: S← Position.x, Position.y, i
4: addConstraint(S) i ← i + 1
As environmental changes cover a time period,
unlike the constraints, all the states having the exact
coordinates with the change and being in the given pe-
riod should be deleted from the closed list, and chil-
dren of them should be pushed to the open set to be
deleted further (See Algorithm 4). Additionally, as
stated in the description, the problem only covers en-
vironmental changes that constrain states; hence ob-
stacle removal is not implemented, but it can be im-
plemented easily by tailoring the makeChange func-
tion.
Algorithm 5: advance.
Require: {OPEN, CLOSED, t }
1: S
t
← getCurrentState() P
t
: { x, y, t}
2: for each state S do
3: if S.t = t and S 6= S
T
then
4: addConstraint(S)
The advance function simulates one time-step of
advancement. As after time-step (t) being a state
other than the recently realized state becomes impos-
sible, the function adds constraints to these states.
For example, after three advancements, if an agent
is at (2,2,3) it cannot be present (2,1,3), so this state
should be constrained. The getCurrentState function
returns the state which the agent currently is. The ad-
vance function does not change the calculated path;
however, it affects further replannings. Note that, in
implication, we have used a priority queue (priori-
tizing lower time-steps) storing states in OPEN and
CLOSED sets in order not to inspect all states.
3.1 Example Run
In this section we will show an example run of DLPA*
with a simple planning case including a constraint ad-
dition. The obstacle addition is just consecutive con-
straint addition we just only considered a constraint
addition for simplicity.
(a) Map
(b) Initial
Configuration
(c) Search
Space
(d) Times
(e) Initial Paths
Figure 2: Example run.
Consider the environment in Figure 2 (a). In Figure
2 (b), starting coordinates of agents are shown as a
robot figure, and goal coordinates with a house fig-
ure having the same colour as the agent. Figure 2
(c) shows the search space of the agents. As we are
searching in the time-space domain, we divided every
coordinate into nine time spaces. All the squares in
the Figure 2 (c) represent a time-space tuple. Every
coordinate has nine states starting from the upper left
corner, as in Figure 2 (d).
The initial run of the LIMP is indifferent to the
classical CBS and the initial run of the DLPA* is in-
different to the A* in three dimensions. After the ini-
tial run, agents compute their paths as in Figure 2
LIMP: Incremental Multi-agent Path Planning with LPA
211

(e). After the initial plannings, the search space of
the purple agent can be seen in Figure 3 (a) (initial
search space). The green states are the states in the
closed set, and the yellow states represent the states
in the Open list. The path of the purple agent can
be easily obtained by performing a backward search
from the state (A,2,2). The path is (C,2,0) → (B,2,1)
→ (A,2,2).
(a) Initial search
space
(b) After adding
constraint
(d) Iteration-2
(e) Iteration-3
(c) Iteration-1
(f) Iteration-4
(g) Final
Figure 3: State spaces of the example run.
It can be easily seen that there is a conflict at the
state (B,2,1). The high-level search constraints one of
the agents. In the example, we assumed that the pur-
ple agent is constrained from being at (B,2,1). The
addConstraint function deletes the state (B,2,1) from
the Closed list and pushes (A,2,3) to the Open list as
it is in the Closed list and it is a child of (B,2,1). Fig-
ure 3 (b) (search space after adding constraint) rep-
resents the search space of the purple agent after the
addConstraint function is performed. The red square
indicates the constrained state.
The algorithm takes the state (A,2,2) as it has the
highest priority. The state has no parents; in other
words, (A,2,1) is not in the closed list, (B,2,1) is
constrained, and there is an obstacle at both (A,1,1)
and (A,3,1). So, the state (A,2,2) is deleted from the
closed list. None of the children of the state is in the
Closed set, so the algorithm does not add any state
to the Open set. Figure 3 (c) (iteration-1) shows the
search space after the state (A,2,2) is popped and ex-
amined.
At next iteration, (C,2,1) and (B,2,2) have the
highest priorities. Assume that (B,2,2) is chosen. The
algorithm pops it from the Open set. As it has nei-
ther a parent nor a child and it is not in the Closed set,
it is basically deleted from the Open set. Figure 3
(d) (iteration-2) represents the search space after the
iteration.
Then, the algorithm picks the state (C,2,1). It is
added to the Closed set, and its children (B,2,2) and
(C,2,2) are pushed to the Open set. Figure 3 (e)
(iteration-3) shows the search space after this itera-
tion.
After these iterations, states (B,2,2) and (A,2,3)
are popped from the Open set, respectively and their
children are added to the Open set. Figure 3 (f)
(iteration-4) shows the iterations, respectively.
So the new path of the purple agent can be found
easily by performing backward search from (A,2,3).
The resulting path is (C,2,0) → (C,2,1) → (B,2,2) →
(A,2,3). The final iteration can be seen at Figure 3 (g)
(final iteration). As the computed path of green agent
was (B,1,0) → (B,2,1) → (B,3,2), there is no conflict
in the paths so the LIMP terminates returning given
paths.
3.2 Theoretical Analysis
In this section, we will show that DLPA* is optimal.
In addition, both DLPA* and LIMP are complete. The
DLPA* has the same flow as the LPA*. As in the dis-
crete domain with the constant cost, a vertex is either
connected to a vertex, meaning that it has an edge
with this vertex with cost one, or disconnected to a
vertex, meaning that it has an edge with this vertex
with cost infinity. Assigning the cost of an edge to
infinity has the same effect as deleting the edge from
the map.
In the space-time domain, a state can have an exact
g-value (due to the time property) and an exact f value
(due to the coordinates). So, changing the cost of a
state is only possible when a state is deleted or newly
examined. The cost change in the LPA* corresponds
to the state deletion or addition in the DLPA*.
Adding a constraint in the DLPA* corresponds to
setting all the incoming edges to infinity in the LPA*.
Performing environmental change also corresponds to
setting proper edges to infinity.
Although advance function in DLPA* have no
equivalent in LPA*, adding a constraint to all states in
time t except a state s results in the same search tree
with a search rooted at (s,t). So, it does not break the
optimality or completeness of DLPA*.
As all the operations correspond to an operation in
the LPA*, the DLPA* is just a particular instantiation
of the LPA*. That implies the DLPA* is also com-
plete, sound, and optimal as the LPA* given that the
underlying heuristic is consistent. However, if there
exists no solution, the algorithm does not terminate.
The termination condition should be checked before-
hand.
CBS-D*-lite is not optimal; hence the LIMP is
also not optimal but complete.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
212
4 EXPERIMENTAL STUDY
There are no studies except the CBS-replanner and
CBS-D*-lite for solving the I-MAPF problem (Semiz
and Polat, 2021). Hence, we compared our results
with the CBS-replanner and the CBS-D*-lite. We
run benchmark tests for all of the three algorithms
in 8 configurations. A configuration consists of a
map, a number of agents, a number of environmental
changes. We also used varying environmental change
frequencies (4,6,8,12 and 24 number of environmen-
tal changes in one time-step) with different minimum
and the maximum manhattan distances between the
agent’s start and the goal location. Maximum distance
is added to the configuration as the distance highly
affects memory usage, and our test environment has
limited memory. We have used four maps which are
named 8x8, cross, den520d and brc202d, given in 4.
As all of the algorithms compute different paths at
the root of the search, we have chosen different envi-
ronmental changes for different algorithms. This ran-
domness may make individual test cases biased. To
make this not affect the experiment results, we tried
to run various test cases so the distribution of the test
case results might give better insights. We have run
12200 test cases in total. As some of the cases do not
have a solution or some of the environmental changes
may lead dramatic increase in the elapsed time, which
will create abnormality, we limited one test run to
elapse at most 300 seconds and discarded the cases
that one of the algorithms is exceeded the limit. In
addition to the above, we also run handcrafted exper-
iments to check the completeness of the LIMP and
optimality of the DLPA*.
(a) 8x8 (b) Cross (c) Den520d (d) Brc202d
Figure 4: Maps used in the experiments.
We have tested algorithms in 8 configurations in
the maps 8x8, cross, den520d and brc202d maps.
Den520d and brc202d are the maps taken from
Dragon Age: Origins game. These maps are
commonly used in benchmarking MAPF algorithms
(Sturtevant, 2012). 8x8 environment has an 8x8 grid
without any obstacles. The Cross environment is a
9x9 grid map with a narrow crossing point in the mid-
dle making agents congest more. We have experi-
mented with small maps (8x8 and 9x9) with 4 and
6 agents and larger maps (den520d and brc202d) with
10 and 15 agents. Lastly, we applied 24 environmen-
tal changes to all configurations.
We have given the results of each configuration in
the following subsections. In the graphs, the x dimen-
sion is the number of environmental changes, the y
dimension is the computation time (ms), and K rep-
resents the number of agents. Note that; results are
reported on a logarithmic scale to fit in the graph.
We have implemented the algorithms using C++. We
have run a benchmark test on a test computer having
AMD Opteron 6376 1.4 MHz core.
4.1 Small Map Scenarios
(a) cross
(b) 8x8
Figure 5: Test results of small map scenarios.
We have run tests on small maps to investigate the per-
formance of LIMP where more congestion happens.
8x8 and cross maps are used for this set of experi-
ments. Since the maps are small, an increase in the
agent count results in high computation times, mak-
ing test cases fail. So we run these cases with a low
number of agents (4 and 6). Figure 5 (a) and (b)
shows the results of the 8x8 map, and Figure 5 (c)
and (d) shows the results of the cross map. For 8x8
map, we have run 1500 and 500 test cases with 4 and 6
agents, respectively. In the cross map (Figure 4b), the
walls separate the map into four sub-parts. The centre
of the map has no obstacles, so agents can move be-
tween the sub-regions, and the crossing region creates
congestion. We have run 2000 and 700 test cases for
the cross map with 4 and 6 agents.
In both maps, LIMP performed worse in the first
environmental changes. On the contrary, it out-
performed CBS-D*-lite after several environmental
changes.
LIMP: Incremental Multi-agent Path Planning with LPA
213

4.2 Large Map Scenarios
(a) Den520d
(b) Brc202d
Figure 6: Test results of large map scenarios.
Den520d and brc202d (Figure 4c,d) maps are used to
test the algorithms, common benchmark maps in the
literature. The number of agents is taken as 10 and
15. We have run 2000 and 1000 tests for 10 and 15
agents for each map, respectively. Additionally, we
have tested LIMP with 20, 25 and 30 agents, which
ended with the same results; however, as eliciting ran-
domness factor requires a high number of test cases,
we did not include these in this paper. Figure 6 a
show the results of the den520d map, and Figure 6b
include the results of the brc202d map.
LIMP, in both maps, performed better than CBS-
D*-lite after the 19th environmental change. As a re-
sult, LIMP is a better option in larger environments
where environmental changes are frequent.
4.3 Comparison with CBS-replanner
Figure 7: Computation time comparison of I-MAPF
solvers.
In this section, we compared computation times of
the CBS-replanner, the CBS-D*-lite and LIMP. Be-
cause of the high computational time of the CBS-
replanner, we did not include it in other configura-
tions. In addition, we lowered the environmental
change count to 12 and only tested with ten agent con-
figurations. We have run 1500 tests in the brc202d
map. LIMP and CBS-D*-lite strongly outperformed
CBS-replanner as expected. Figure 7 shows compu-
tation times of the three algorithms tested.
4.4 Comparison of Path Costs
Table 1: Cost analysis of brc202d map with 10 agents.
CBS- CBS-
LIMP D*-lite LIMP D*-lite
0 31.59 31.59 13 32.49 31.93
1 31.65 31.59 14 32.56 31.95
2 31.72 31.65 15 32.62 31.98
3 31.80 31.65 16 32.70 32.01
4 31.86 31.69 17 32.76 32.03
5 31.92 31.73 18 32.82 32.06
6 31.98 31.75 19 32.89 32.07
7 32.06 31.78 20 32.96 32.09
8 32.13 31.80 21 33.04 32.11
9 32.20 31.82 22 33.11 32.14
10 32.27 31.85 23 33.16 32.16
11 32.34 31.87 24 33.24 32.18
12 32.41 31.91
In this section, we compared the total path cost values
of the CBS-D*-lite and LIMP. As CBS-D*-lite has a
decent success rate at total path cost, this comparison
will give us an important overview of the success rate
of LIMP. We took the average total path cost of the
resulting paths of the algorithms after each environ-
mental change for each agent in the brc202d map with
ten agents. As other results were similar, we just pre-
sented one configuration. Table 1 shows the average
path costs of each algorithm. Although CBS-D*-lite
has better total path costs, there is no significant dif-
ference between CBS-D*-lite and LIMP. This shows
that we did not deviate from the optimal solution.
5 CONCLUSION AND FUTURE
WORK
The existing MAPF algorithms mainly focus on static
environments; however, the real-life problems are far
away from being static. Recently, an incremental ver-
sion of MAPF was proposed by Semiz, and Polat
(Semiz and Polat, 2021). They also proposed two
algorithms to solve the I-MAPF problem with CBS
called CBS-replanner and CBS-D*-lite. The CBS-
replanner uses A* as a low-level search, and CBS-
D*-lite uses D*-lite in the low-level search.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
214

In this paper, we proposed two algorithms called
LIMP and DLPA*. LIMP is a combination of the
CBS-D*-lite with our new search algorithm DLPA*,
which is the relaxed version of LPA*. DLPA* is com-
plete and optimal, while LIMP is just complete as it
is built on the top of a sub-optimal I-MAPF solver
called CBS-D*-lite. We have seen that, despite falling
behind in initial calculation, LIMP catches up and
outperforms CBS-D*-lite after several changes, and
it shows that LIMP reacts to environmental changes
more efficiently. Although D*-lite finds slightly lower
path-cost solutions, the differences are at an accept-
able level. Hence, LIMP is a good alternative for
solving the I-MAPF problem, especially when envi-
ronmental changes are frequent.
ACKNOWLEDGEMENTS
This work is partially supported by the Scientific
and Technological Research Council of Turkey under
Grant No 120E504.
REFERENCES
Atiq, B., Patoglu, V., and Erdem, E. (2020). Dynamic multi-
agent path finding based on conflict resolution using
answer set programming. In Proceedings 36th In-
ternational Conference on Logic Programming (Tech-
nical Communications), ICLP Technical Communi-
cations 2020, (Technical Communications) UNICAL,
Rende (CS), Italy, 18-24th September 2020, volume
325, pages 223–229.
Boyarski, E., Felner, A., Harabor, D., Stuckey, P. J., Cohen,
L., Li, J., and Koenig, S. (2020). Iterative-deepening
conflict-based search. In Proceedings of the Twenty-
Ninth International Joint Conference on Artificial In-
telligence, IJCAI-20, pages 4084–4090. Main track.
Koenig, S. and Likhachev, M. (2002). Dlite. In Eighteenth
National Conference on Artificial Intelligence, page
476–483, USA. American Association for Artificial
Intelligence.
Koenig, S., Likhachev, M., and Furcy, D. (2004). Lifelong
planning a*. Artificial Intelligence, 155(1):93–146.
Korf, R. E. (1990). Real-time heuristic search. Artificial
Intelligence, 42(2):189–211.
Lumelsky, V. and Stepanov, A. (1986). Dynamic path plan-
ning for a mobile automaton with limited information
on the environment. IEEE Transactions on Automatic
Control, 31(11):1058–1063.
Murano, A., Perelli, G., and Rubin, S. (2015). Multi-agent
path planning in known dynamic environments. In
PRIMA 2015: Principles and Practice of Multi-Agent
Systems, pages 218–231.
Pirzadeh, A. and Snyder, W. (1990). A unified solution to
coverage and search in explored and unexplored ter-
rains using indirect control. In Proceedings., IEEE In-
ternational Conference on Robotics and Automation,
pages 2113–2119 vol.3.
Ramalingam, G. and Reps, T. (1996). An incremental al-
gorithm for a generalization of the shortest-path prob-
lem. Journal of Algorithms, 21(2):267–305.
Semiz, F. and Polat, F. (2021). Incremental multi-agent
path finding. Future Generation Computer Systems,
116:220–233.
Sharon, G., Stern, R., Felner, A., and Sturtevant, N. R.
(2015). Conflict-based search for optimal multi-agent
pathfinding. Artificial Intelligence, 219:40–66.
Standley, T. (2010). Finding optimal solutions to cooper-
ative pathfinding problems. Proceedings of the AAAI
Conference on Artificial Intelligence, 24(1).
Stentz, A. (1993). Optimal and efficient path planning
for unknown and dynamic environments. INTERNA-
TIONAL JOURNAL OF ROBOTICS AND AUTOMA-
TION, 10:89–100.
Stentz, A. (1995). The focussed d* algorithm for real-
time replanning. In In Proceedings of the Inter-
national Joint Conference on Artificial Intelligence,
pages 1652–1659.
Sturtevant, N. R. (2012). Benchmarks for grid-based
pathfinding. IEEE Transactions on Computational In-
telligence and AI in Games, 4(2):144–148.
Wagner, G. and Choset, H. (2011). M*: A complete
multirobot path planning algorithm with performance
bounds. In 2011 IEEE/RSJ International Conference
on Intelligent Robots and Systems, pages 3260–3267.
Wan, Q., Gu, C., Sun, S., Chen, M., Huang, H., and Jia,
X. (2018). Lifelong multi-agent path finding in a dy-
namic environment. In 2018 15th International Con-
ference on Control, Automation, Robotics and Vision
(ICARCV), pages 875–882.
Zelinsky, A. (1992). A mobile robot exploration algo-
rithm. IEEE Transactions on Robotics and Automa-
tion, 8(6):707–717.
LIMP: Incremental Multi-agent Path Planning with LPA
215
