
Error Evaluation of Semantic VSLAM Algorithms for Smart Farming
Adam Kalisz
1 a
, Mingjun Sun
1 b
, Jonas Gedschold
2 c
, Tim Erich Wegner
2 d
and Giovanni del Galdo
2,3 e
and J
¨
orn Thielecke
1 f
1
Department of Electrical, Electronic and Communication Engineering, Information Technology (LIKE),
Friedrich-Alexander-Universit
¨
at Erlangen-N
¨
urnberg, Am Wolfsmantel 33, Erlangen, Germany
2
Institute for Information Technology, TU Ilmenau, Ehrenbergstraße 29, Ilmenau, Germany
3
Fraunhofer Institute for Integrated Circuits (IIS), Am Vogelherd 90, Ilmenau, Germany
Keywords:
Smart Farming, Semantic Segmentation, Visual, Localization, SLAM.
Abstract:
In recent years, crop monitoring and plant phenotyping are becoming increasingly important tools to improve
farming efficiency and crop quality. In the field of smart farming, the combination of high-precision cameras
and Visual Simultaneous Localization And Mapping (SLAM) algorithms can automate the entire process from
planting to picking. In this work, we systematically analyze errors on trajectory accuracy of a watermelon field
created in a virtual environment for the application of smart farming, and discuss the quality of the 3D mapping
effects from an optical point of view. By using an ad-hoc synthetic data set we discuss and compare the
influencing factors with respect to performance and drawbacks of current state-of-the-art system architectures.
We summarize the contributions of our work as follows: (1) We extend ORB-SLAM2 with Semantic Input
which we name SI-VSLAM in the following. (2) We evaluate the proposed system using real and synthetic
data sets with modelled sensor non-idealities. (3) We provide an extensive analysis of the error behaviours
on a virtual watermelon field which can be both static and dynamic as an example for a real use case of the
system.
1 INTRODUCTION
In recent years, with the rapid development of indus-
trial automation and breakthroughs in Visual SLAM
technology, robots have been widely adopted in in-
dustrial production. Using agricultural robots com-
bined with technologies such as semantic segmenta-
tion, people can monitor the type and growth of crops
in real time (Ganchenko and Doudkin, 2019).
Our work is focused around developing a mobile,
multi-sensor crop monitoring system within a coop-
erative project between Technische Universit
¨
at Ilme-
nau and Friedrich-Alexander-University of Erlangen-
Nuremberg. The aim of the project
1
is to build a
a
https://orcid.org/0000-0001-5428-5433
b
https://orcid.org/0000-0001-8943-817X
c
https://orcid.org/0000-0002-0251-887X
d
https://orcid.org/0000-0001-9484-7998
e
https://orcid.org/0000-0002-7195-4253
f
https://orcid.org/0000-0001-6671-6341
1
This contribution is partly funded by DFG project
420546347
universal system that can identify, map and monitor
any plant. This is also the motivation for creating
a virtual environment in which the specific charac-
teristics of different plant species can be tested and
evaluated. We have decided to use watermelons as a
first example in our work as they exhibit easily recog-
nizable characteristics, such as changing colors, sizes
and textures during their growth process. One of the
main sensors used on our platform is a stereo (RGB-
D) camera. In order to provide farmers with a ro-
bust way to efficiently monitor their land, and thus
reduce waste and improve productivity, we need to
be aware of how erroneous measurements may im-
pact the quality of the mapping process. Inspired by
ORB-SLAM2 (Mur-Artal and Tard
´
os, 2017) and DS-
SLAM (Yu et al., 2018), this work proposes and sys-
tematically evaluates a Visual SLAM system which
utilizes semantic segmentation as its input. This sys-
tem is named Visual SLAM with Semantic Input (SI-
VSLAM) in the following.
In our research, we found that most of the seman-
tic SLAM projects are build on neural networks and
Kalisz, A., Sun, M., Gedschold, J., Wegner, T., Galdo, G. and Thielecke, J.
Error Evaluation of Semantic VSLAM Algorithms for Smart Farming.
DOI: 10.5220/0010820500003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
801-810
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
801

real data, such as DS-SLAM based on Caffe-SegNet
and semantic slam (Xuan and David, 2018) based on
PSPNet. However, they only analyzed the accuracy
of the trajectories through the TUM data set, and paid
little attention to the effects of the generated semantic
maps. Usually, the construction of a neural network
needs to collect a large number of pictures, which will
greatly increase the time cost. The neural network
itself may still output incorrect predictions due to a
representation bias (Li and Vasconcelos, 2019). Real
data sets also have some inconveniences. Most of the
existing public data sets, such as TUM and EuRoC, do
not provide semantic image sequences, and they can-
not be applied to smart farming. More importantly,
due to the randomness of environmental factors, it is
impractical to use real data sets to further analyze in-
dividual influencing factors in the environment. Con-
sidering the limitations of neural networks and real
data sets, we use the 3D scene simulation software
Blender
2
in order to create a custom synthetic agri-
cultural environment, namely a watermelon field, and
use related plug-ins to generate perfect RGB, depth
and semantic image sequences. Then, by systemati-
cally deteriorating these image sequences using error
models from the literature, we investigate how each
error impacts both localization and mapping accu-
racy as it would in a real measurement. Additionally,
we test our system on slightly different environments,
both static and dynamic (e.g. moving objects), in or-
der to determine how plant growth / distribution may
influence the robustness of the system. Compared
with real data sets, synthetic scenes allow us to inde-
pendently control environmental variables in order to
discuss their effects on a specific SLAM system. This
contribution proposes methods for systematic analy-
sis of semantic SLAM systems using synthetic data
sets and thus benefit the research community.
In the next section, we will briefly describe the
design of the entire system and its individual compo-
nents. In the third section, we will introduce the setup
for a systematic evaluation, including the creation of
synthetic data sets and a series of experiments based
on these data sets. Finally, the whole work will be
summarized in the last section.
2 SYSTEM OVERVIEW
In this section, the framework of the system will be
introduced in detail. Figure 1 shows the flow chart of
the system.
SI-VSLAM is a system based on ORB-SLAM2
2
https://www.blender.org/
RGB
Depth
Semantic
Remove dynamic
objects
RGB point cloud
Semantic point
cloud
Track
Visual
Odometry
RGB
Octomap
Semantic
Octomap
Figure 1: Flow chart of SI-VSLAM. We propose to extend
ORB-SLAM2 by an additional semantic input and to use
it in order to remove dynamic objects before tracking the
camera motion. Furthermore, we added three-dimensional
occupancy grid maps (octomaps) to the final system (green
blocks).
(Mur-Artal and Tard
´
os, 2017). This work adds an
additional interface for the input of semantic images
to ORB-SLAM2, and adds the function of generating
dense point clouds. For subsequent visual compar-
ison, the generated semantic and RGB point clouds
will be saved to disk in order to be inspected sepa-
rately. The most commonly used map in robot nav-
igation and positioning is a 3D occupancy grid map,
and the octree map is one of the occupancy grid maps
based on the octree algorithm. If the Robot Operating
System (ROS) is used, this SLAM system can also
dynamically update the octree map in real time.
The authors of DS-SLAM proposed the idea of us-
ing optical flow to detect dynamic objects and seman-
tic segmentation to eliminate unstable feature points.
By filtering out unstable feature points, the robustness
and accuracy of the system can be significantly im-
proved. However, this method of first extracting fea-
ture points and then removing unstable points is risky.
When there are many dynamic objects in the scene,
this method may result in too few feature points left,
which is hardly conducive to the feature matching.
Differently from DS-SLAM, in SI-VSLAM the fea-
ture point extraction is performed after the dynamic
object is masked out in the image, so as to ensure that
there are enough feature points during feature match-
ing. Taking into account the impact of animals walk-
ing across the agricultural environment, we analyze
their influence on our system.
In 2020, ORB-SLAM3 (Campos et al., 2021) was
released, which added a fisheye camera model to
the prior version. Furthermore, ORB-SLAM3 was
improved in the relocalization part, such as using
Multiple-Maps (ORBSLAM-Atlas), to recover when
the tracking is lost. Finally, ORB-SLAM3 also added
the ability of fusing Inertial Measurement Unit (IMU)
data. The reason why the latest version of ORB-
SLAM3 was not used in our work is that we are more
familiar with ORB-SLAM2 and do not necessarily re-
quire the new features for our experiments.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
802

3 EVALUATION
The performance of a SLAM system can be analyzed
from multiple perspectives, such as time / space com-
plexity, power consumption and accuracy. Due to our
current plan to create and analyze the semantic maps
offline, after the system has been carried across the
field by the farmer, we do not require fast or energy
efficient processing at the moment. Therefore, we fo-
cus on the accuracy of the proposed system in this pa-
per. In this section, we will specifically introduce how
to use the synthetic data set to systematically evaluate
the SLAM system.
3.1 General Evaluation Metrics
The commonly used method is to use the absolute tra-
jectory error (ATE) or the relative pose error (RPE) to
evaluate the accuracy of the estimated camera trajec-
tory. ATE and RPE were defined in the TUM data
set benchmark for the first time and are widely used
(Sturm et al., 2012). After the initialization phase, a
global coordinate system is created on the basis of the
first keyframe, the pose P
i
of the i-th frame is cal-
culated by Iterative Closest Point (ICP) and Bundle
Adjustment (BA) and this will be repeated until the
last camera frame n, such that the estimated poses are
P
1
, ..., P
n
∈ SE(3). The reference pose of the camera
is represented by Q
i
, which can be read directly from
the ground truth, Q
1
, ..., Q
n
∈ SE(3). A time interval
between two camera frames is represented by ∆. It is
assumed that the timestamp of the estimated poses is
aligned with the timestamp of the real poses and their
total number of frames is the same.
3.1.1 Relative Pose Error (RPE)
RPE mainly describes the accuracy of the pose differ-
ence between two frames with a fixed time difference
∆ (compared to the real pose difference) (Prokhorov
et al., 2019). RPE of the i-th frame can be expressed
by
E
i
:= (Q
−1
i
Q
i+∆
)
−1
(P
−1
i
P
i+∆
). (1)
The root mean square error (RMSE)
RMSE(E
1:n
, ∆) :=
1
m
m
∑
i=1
ktrans(E
i
)k
2
!
1
2
, (2)
can be used to calculate the RPE of the entire system,
by using m = n −∆ individual RPEs. Note that Equa-
tion 2 only considers the translational components of
each RPE trans(E
i
). The rotation component gener-
ally does not need to be calculated, because the rota-
tional error increases the translational errors as well
when the camera is moved (Zhang and Scaramuzza,
2018).
3.1.2 Absolute Trajectory Error (ATE)
While the RPE allows to evaluate the drift per frame,
the ATE helps to evaluate the global consistency of
the estimated trajectory. The ATE compares the ab-
solute distances between the estimated pose and the
reference pose. It can very intuitively reflect the accu-
racy of the algorithm. The estimated pose and ground
truth in most cases are not in the same coordinate sys-
tem. Therefore, an approximation rigid-body trans-
formation S ∈ SE(3) can be calculated using least
squares methods prior to ATE calculations. The ATE
of the i-th frame can be represented by
F
i
:= Q
−1
i
SP
i
. (3)
Similarly, the ATE of the entire system can also be
expressed as RMSE
RMSE(F
1:n
) :=
1
n
n
∑
i=1
ktrans(F
i
)k
2
!
1
2
. (4)
In this work, ATE is used as the evaluation met-
ric of trajectory accuracy. Compared with RPE, ATE
is less computationally intensive and more sensitive.
In order to account for any randomness in the estima-
tions (for example caused by RANdom SAmple Con-
sensus, RANSAC, within ORB-SLAM2), all the cal-
culation results regarding trajectory accuracy in the
following are the average of 10 runs on the same in-
put.
3.2 Demonstration of Practicability and
Feasibility using the TUM Data Set
Before the specific analysis of the influencing factors,
real data sets must first be used in order to check the
feasibility and practicability of the algorithm.
The TUM RGB-D benchmark is a popular data
set for RGB-D cameras and contains numerous im-
age sequences, each of which provides RGB images,
depth images and ground truth. In the experiment,
we selected three data sets, namely freiburg1 room
(F1), freiburg2 desk (F2) und freiburg3 walking xyz
(F3). Compared with the camera in F2, the camera in
F1 moves faster and has a wider range of movement.
With F3, the influence of dynamic objects on the sys-
tem can be discussed. Since there is no semantic pic-
ture sequence in the TUM dataset, dynamic objects
cannot be filtered out. The accuracy of the algorithms
when running different image sequences is shown in
Figure 2.
Error Evaluation of Semantic VSLAM Algorithms for Smart Farming
803
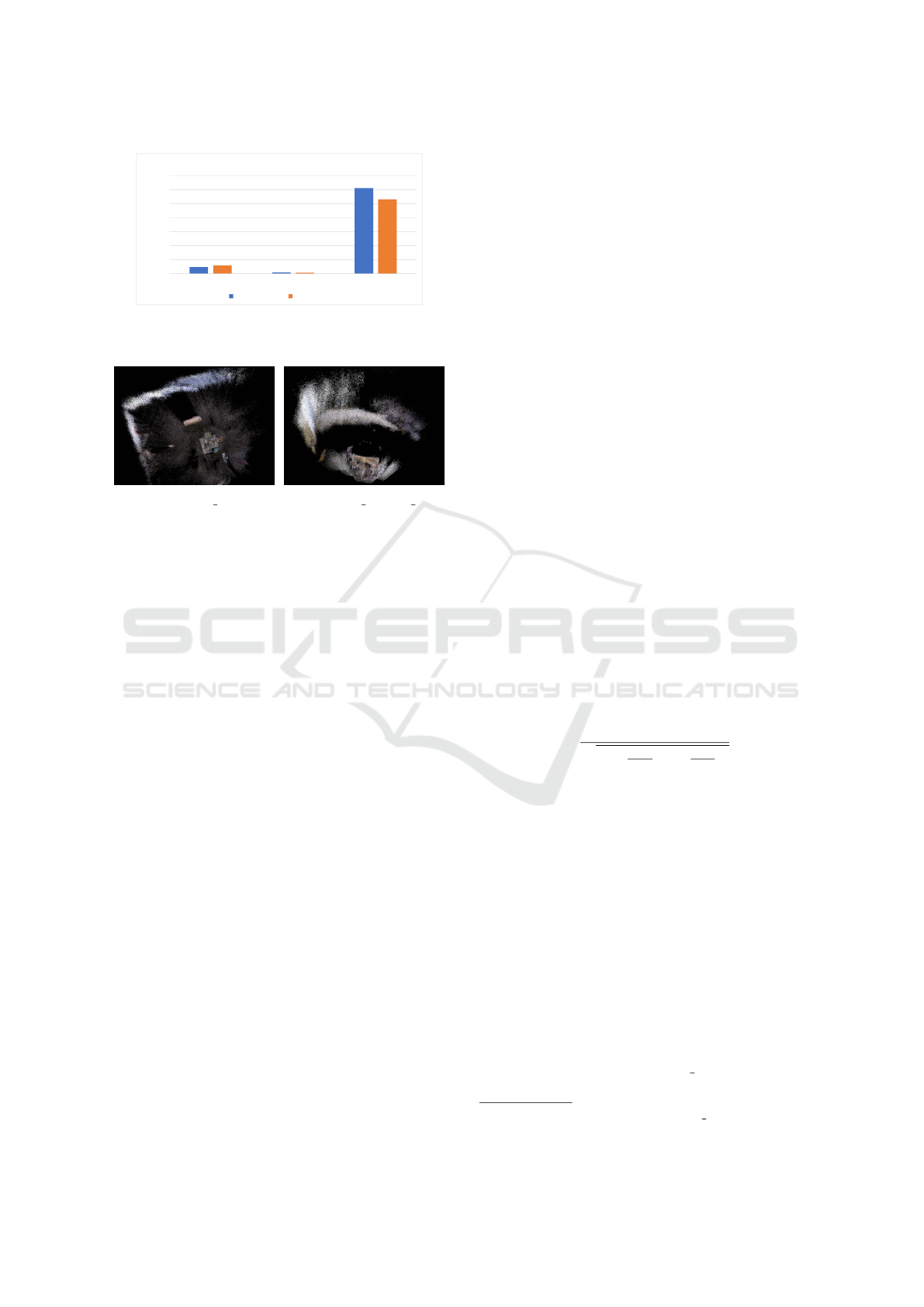
0.0476
0.0095
0.6104
0.0595
0.0077
0.5311
freiburg1_room freiburg2_desk freiburg3_walking_xyz
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
ATE (m)
Comparison on TUM Benchmark
ORB-SLAM2 SI-VSLAM
Figure 2: ATE of ORB-SLAM2 and SI-VSLAM when run-
ning on different picture sequences.
(a) freiburg2 desk. (b) freiburg3 walking xyz.
Figure 3: TUM RGB-D benchmark point clouds.
From Figure 2 it can be seen that ORB-SLAM and
SI-VSLAM have a high accuracy in a relatively static
environment, especially when the range of motion of
the camera is small and the speed of motion is slow. If
there are dynamic objects in the system and the area
of the dynamic objects is large, the accuracy of the
two systems will be severely affected.
The point clouds of F2 and F3 generated by SI-
VSLAM are shown in Figure 3a and 3b.
The update of the point cloud is a constant addi-
tion process. The point cloud of unstable objects and
the point cloud generated due to an incorrect pose
estimate remain in the map, making the map diffi-
cult to interpret. It can be seen from both figures
that the depth noise increases as the depth value in-
creases. This conclusion was proven by experiments
in the work Noise Modeling and Uncertainty Prop-
agation for Time of Flight (ToF) Sensors (Belhedi
et al., 2012).
3.3 Creation of Synthetic Data Sets
During this research, we found that most of the se-
mantic SLAM projects focus on the training of se-
mantic models and analyze the accuracy of object
recognition, but there is not much analysis of Visual
SLAM. One reason why this is difficult, is that in a
real setting it is not trivial to independently control
the variables of the environment and thus evaluate
how neural network predictions are composed in de-
tail. Moreover, the SLAM part of the research is often
focused on trajectory analysis, and not enough atten-
tion is paid to the mapping. However, a SLAM system
is often affected by many factors, such as noise, light
intensity, and incorrect semantic segmentation, which
may threaten the robustness of the system. In order
to have a more systematic research on semantic map-
ping, we use Blender to build a synthetic agricultural
scene, and all simulation models are built according
to the existing literature.
3.3.1 Add-on: Vision-Blender
Vision-Blender
3
(Cartucho et al., 2020) is a synthetic
data set generator based on Blender 2.82. Vision-
Blender was specially developed for robotic surgery.
It can be used to create practical data sets for verifi-
cation of computer vision algorithms, greatly reduc-
ing the cost required to prepare the data set. Vision-
Blender can extract the intrinsic parameters of the
camera, the pose of objects, calculate depth values
and provide the masks for the semantic segmentation.
Blender provides two rendering engines, Eevee
and Cycles. The semantic segmentation can only
be generated when the Cycles engine is used. Cy-
cles in Blender 2.82 uses path tracing for rendering.
The measurement model of the depth value is similar
to the model of the ToF sensor in RGB-D cameras,
which uses the end-to-end delay to measure distances
(Heckenkamp, 2008), therefore it uses the distance
along the line of sight (z
0
).
The distance model usually used in SLAM is the
vertical distance to the image plane (z), the depth
value must be corrected by a projection operation
z =
z
0
q
1 + (
c
x
−u
f
x
)
2
+ (
c
y
−v
f
y
)
2
, (5)
where f
x
, f
y
, c
x
, c
y
are the intrinsic parameters of the
camera, u and v are the coordinates of the pixel in the
image. However, we found that the latest Blender (at
the time of this writing, version 2.93) has been im-
proved, and one no longer needs to modify the depth
value. Vision-blender can generate a large synthetic
data set where the artist can quickly specify the se-
mantic labels of objects in the scene. Consequently,
it has great potential to be applied in our experiments
where the robustness and mapping quality needs to be
thoroughly assessed.
3.3.2 Overview of the Synthetic Data Set
The experiments in this paper were conducted using
a custom data set with a length of 610 frames. The
basic data set is named 16plants static, which con-
tains 13 ripe watermelons, 10 unripe watermelons and
3
https://github.com/Cartucho/vision blender
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
804

16 plants. In the experiments, the RGB-D camera
recorded the square watermelon field (3.5 m × 3.5
m) where the virtual camera was animated to mimic
a handheld camera motion while looking down on the
scene (compare Figure 4). The camera parameters of
the RGB-D camera in Blender are also set according
to the Microsoft-Kinect-Sensor used in the TUM data
set. Ground Truth was obtained using the B-SLAM-
SIM Blender Addon
4
(Kalisz et al., 2019). The
format of the Ground Truth is (t
x
,t
y
,t
z
, q
x
, q
y
, q
z
, q
w
),
where the first three parameters are the 3D position
and the last four parameters are quaternions of the
camera in the world coordinate frame.
Figure 4: One of the four synthetic scenes with camera tra-
jectory (blue) and dynamic object trajectories (red).
Figure 5 shows the first frame of the RGB images,
the depth images and the semantic images obtained
with Vision Blender. In the semantic picture, blue and
green colors represent unripe and ripe watermelons,
respectively. The duck models, which are provided
for free by (Free3D, 2021), are only used in dynamic
scenes and in such cases depicted by a red color.
(a) RGB (b) Depth (c) Semantic
Figure 5: The first frame of all RGB, depth and semantic
images (green=ripe, blue=unripe and - not shown in this
static example - red=dynamic objects) in this scene. The
generated data is ideal and used in this work to present a
general method to evaluate SLAM implementations based
on various error models and can be extended to other prob-
lems and research areas which rely on similar data.
All images generated by Blender are perfect and
thus no sensor noise nor distortions caused by seman-
tic segmentation are yet considered.
Compared with the RGB point cloud, the semantic
point cloud can better show the characteristics of the
map, and unnecessary information such as dynamic
objects will not be considered. Therefore, semantic
point clouds will be used for analysis in subsequent
4
https://github.com/GSORF/Visual-GPS-SLAM
Figure 6: Semantic point cloud generated by
16plants static.
experimental results. Figure 6 shows the semantic
point cloud generated by the data set 16plants static
without additional interference, and its corresponding
ATE is 0.042 m. As we expected, the accuracy of SI-
VSLAM is relatively good when ideal data is used.
3.4 Robustness of SI-VSLAM under the
Influence of Noise
A Kinect sensor consists of an RGB camera and a ToF
sensor, which are used to obtain RGB pictures and
depth information respectively. The use of sensors
is always associated with random measurement noise
that can be caused by the environment or electrical
devices.
In order to investigate the robustness of the sys-
tem under the influence of noise, in this experiment
Gaussian noise was added to RGB and depth images
according to the existing literature. The ATE will be
calculated and the generated point cloud will also be
analyzed.
3.4.1 Gaussian Noise in RGB Images
There are many sources of noise in an image which
come from various aspects such as image acquisition,
transmission and compression (Bharati et al., 2021).
There are also many types of noise, such as salt and
pepper noise caused by sudden interference signals,
Gaussian noise caused by sensor heating, or Poisson
noise caused by the particle nature of light. In this
experiment Gaussian noise was taken as an example.
Gaussian noise refers to a type of noise whose
probability density function obeys the Gaussian dis-
tribution
f (x) =
1
√
2πσ
exp(−
(x −µ)
2
2σ
2
). (6)
In equation 6, µ is the expected value and σ is the
standard deviation.
Error Evaluation of Semantic VSLAM Algorithms for Smart Farming
805

Both Gaussian as well as salt and pepper noise are
additive and satisfy
A(x, y) = B(x, y) + H(x, y), (7)
where B(x, y) is the original image at pixel coordi-
nates x and y, H(x, y) is the noise, and A(x, y) is the fi-
nal noisy image. A simple error model is used by sim-
ulating correlated noise via adding the same random
number w ∼ N (µ, σ
2
) to each color channel. Thus,
Gaussian noise is added to the three-channel RGB im-
age by
b
0
(x, y) = b(x, y) + w,
g
0
(x, y) = g(x, y) + w,
r
0
(x, y) = r(x, y) + w.
(8)
Usually the value of µ is set to zero and σ is the stan-
dard deviation. Figure 7 shows how the ATE changes
in relation to a varying σ.
0.0421
0.0743
0.1035
0.2102
σ = 0 σ = 40 σ = 80 σ = 130
0
0.05
0.1
0.15
0.2
0.25
ATE (m)
Influence of Gaussian noise (RGB)
Figure 7: Influence of Gaussian noise in RGB images with
increasing σ.
As depicted in Figure 7, Gaussian noise has a
strong influence on the robustness of the system. The
higher the σ, the lower the accuracy of the system.
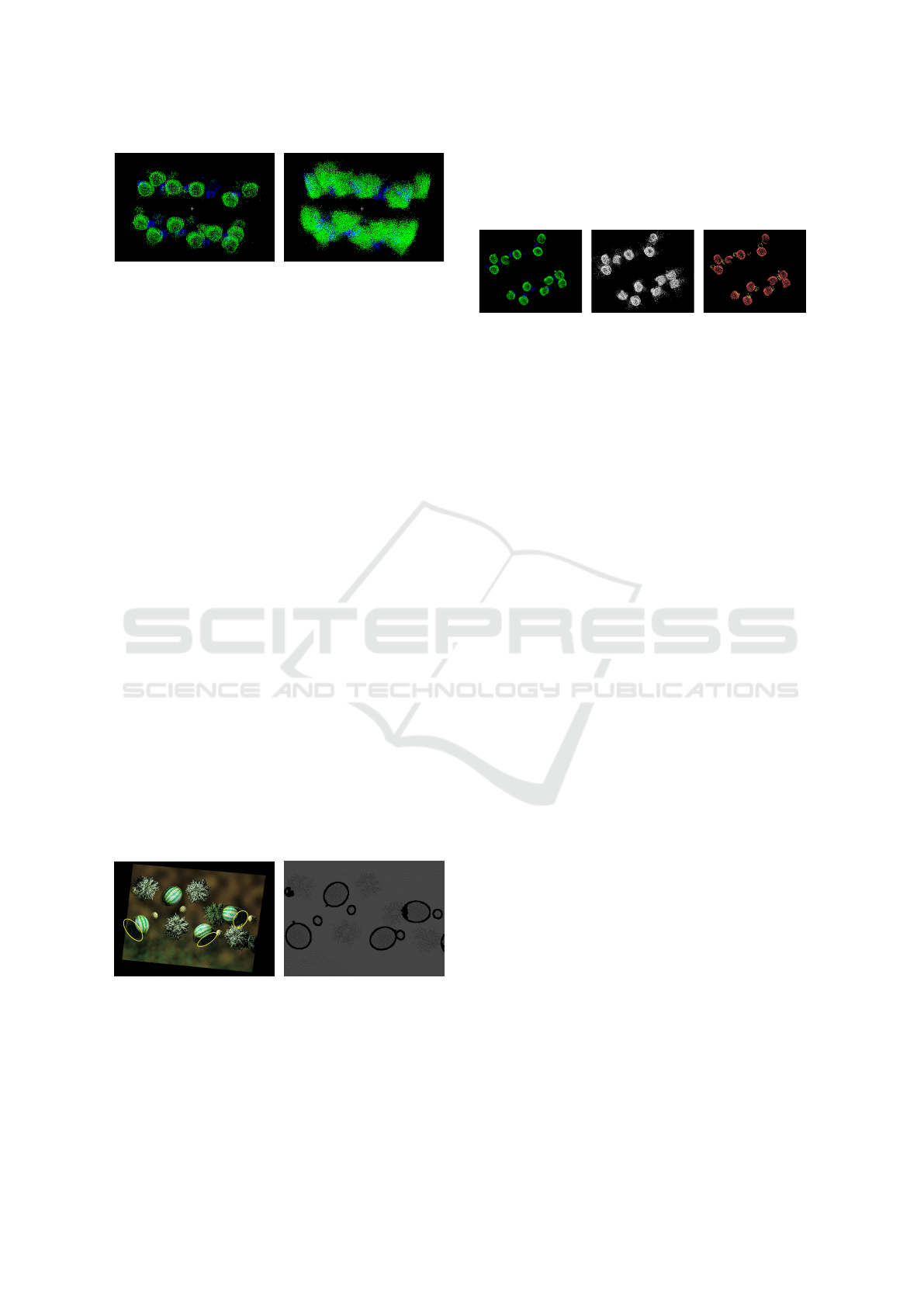
Figure 8 shows the point clouds generated by SI-
VSLAM when σ takes on different values. Interest-
(a) σ = 0 (b) σ = 40 (c) σ = 130
Figure 8: The resulting semantic point clouds with increas-
ing noise in the RGB images.
ingly, the Gaussian noise in the RGB images mainly
distorts the point cloud distribution parallel to the im-
age plane and has no influence on the depth data of
the point cloud. Therefore, the shape of the distortion
roughly reflects the trajectory of the camera.
3.4.2 Gaussian Noise in Depth Images
A Kinect camera uses a ToF-sensor to retrieve the
depth data. In the article Noise Modeling and Un-
certainty Propagation for ToF Sensors (Belhedi et al.,
2012), Amira Belhedi and coworkers took 700 photos
with a ToF sensor at 7 different distances from 0.9m
to 7.4m and came to the conclusion that the depth
noise generated by their ToF sensor can be modelled
by Gaussian noise.
The paper Modeling Kinect Sensor Noise for Im-
proved 3D Reconstruction and Tracking (Nguyen
et al., 2012) found that the depth noise of a Kinect
Sensor can be divided into radial noise (perpendic-
ular to the optical axis, z) and axial noise (parallel to
the z-axis), where the axial noise plays a decisive role,
so the influence of radial noise can be ignored in the
experiment. The authors pointed out that when the
angle of view of the camera is less than 60
◦
, the depth
noise of the Kinect sensor has the following relation-
ship with the depth value:
σ
z
(z) = 0.0012 + 0.0019(z −0.4)
2
, (9)
in other words, the depth noise is only related to the
depth value. With the mathematical model of the
depth noise, noise can be added to the depth image
sequence according to the additive noise model.
In order to clearly show the test results, the case
σ
0
z
(z) = 10σ(z) was also simulated in the experiment.
This is an imaginary value, which does not exist in
reality.
0.0421
0.0417
0.0423
σ = 0 σ = σ(z) σ = 10σ(z)
0.0414
0.0415
0.0416
0.0417
0.0418
0.0419
0.042
0.0421
0.0422
0.0423
0.0424
ATE (m)
Influence of Gaussian noise (Depth)
Figure 9: The Gaussian noise of the depth images has no
significant influence on the accuracy of the system (please
note the scale of the chart).
It can be concluded from Figure 9 that the Gaus-
sian noise of the depth image has no influence on the
accuracy of the system. The reason is that the track-
ing of the pose is achieved through Bundle Adjust-
ment (BA), and the depth data does not participate in
the tracking thread.
The corresponding point clouds in Figure 10 show
that the depth noise affects the distribution of the point
cloud along the Z-axis.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
806
(a) σ = σ(z, θ) (b) σ = 10σ(z, θ)
Figure 10: The depth of noise influences the distribution of
the point cloud along the Z-axis.
3.5 Investigation of the Influences of
Flying Pixels and Missing Depth
Data
Although the RGB-D camera has unlimited perspec-
tives, due to the limitations of the physical hardware
there are still many problems with the depth data in
addition to the noise, e.g. flying pixels and invalid
depth data.
• Flying Pixels: Due to the non-linearity of the im-
age information and the discontinuity of the depth
data, flying pixels can be generated at the edges
of the objects, which theoretically can have any
value between foreground and background (Xiao
et al., 2015).
• Invalid Depth Data: The loss of depth data is an-
other problem with Kinect, usually caused by re-
flections on the surface of smooth objects, translu-
cent objects, or excessive range. Due to the dis-
continuity of the depth data, the depth data is eas-
ily lost at the edges of the objects.
Since these two situations mostly occur on the edge
of the object, both can be simulated using OpenCV’s
canny edge detection algorithm. The extent of the
impact can be adjusted by changing the size of the
extracted edge area. Figure 11 shows the test model
of the flying pixels and the invalid depth data. The
(a) flying pixels (b) invalid depth data
Figure 11: The test model of the flying pixels (random
points in the yellow circle) and the loss of depth value.
results in section 3.4.2 show that the noise and the
changes in the depth images do not affect the accu-
racy and robustness of the system. Therefore the ac-
curacy of the trajectory will not be analyzed in the
experiment. The point clouds in different situations
are shown in Figure 12, where (a) is the original point
cloud, (b) is the point cloud with flying pixels and (c)
is the point cloud with invalid depth data. By com-
(a) Original (b) Flying pixels (c) Invalid depth
Figure 12: The hardware specific errors using RGB-D cam-
eras result in either additional (b) or missing (c) points.
paring with the original image, it can be seen that
the flying pixels are continuously added to the point
cloud in the form of noise. The impact of flying pix-
els increases as the camera moves and the duration of
measurements increases. In contrast, the loss of depth
data at the edges of the objects has only a very small
influence on the reconstruction of the point cloud.
The effect of invalid depth values can be reduced by
moving the camera around the objects of interest or
increasing the acquisition time.
3.6 Investigation of the Influences of
Imprecise Semantic Segmentation
Neural networks are usually used for semantic seg-
mentation in research. However, the number of ob-
jects that a neural network can recognize is often
limited. For example, the PASCAL Visual Object
Classes (VOC) data set (Everingham et al., 2015) con-
sists of 20 objects which is quite coarse. Therefore,
the accuracy of the semantic segmentation is difficult
to guarantee, since misjudgments and unclear object
edges may occur during segmentation.
In addition, video sequences may propagate previ-
ously segmented images by using optical flow meth-
ods. The work of (Zhuang et al., 2021) demonstrates
the challenges around falsely predicted segmentation
masks and presents examples where the object bound-
aries are either dilating or eroding. These two kinds of
distortions can be simulated with OpenCV’s dilating
and eroding operations. From a mathematical point
of view, the principle of dilation and erosion is imple-
mented by convolving an image with a specific con-
volution kernel. The strength of distortion can be ad-
justed by resizing the convolution kernel using the pa-
rameter s. The larger the value of s, the more serious
the distortion. Figure 13 shows the semantic pictures
when dilation and erosion occurs, respectively. Dur-
ing dilating, the area of the color block increases as
the value of s increases. Eroding is a process oppo-
site to dilating. Figure 14 shows the point cloud when
Error Evaluation of Semantic VSLAM Algorithms for Smart Farming
807

(a) original (b) dilating, s=9 (c) eroding, s=8
Figure 13: Distortion model for semantic segmentation.
(a) original (b) dilating, s=9 (c) eroding, s=8
Figure 14: Point cloud with semantic distortion.
these two distortions occur.
According to Figure 14, dilating has a great in-
fluence on the 3D reconstruction due to the addition
of depth data. Compared with dilating, the damage
to the map by eroding is much smaller. When eroding
occurs, the generated point cloud is always a subset of
the true value. Although eroding causes the absence
of some 3D points, these can be optimized by moving
the camera position or increasing the recording time.
The missing parts are observed again and added to the
3D space.
3.7 Investigation of the System’s
Sensitivity to Light
Compared with laser SLAM, Visual SLAM works
based on the image taken by the camera. Therefore,
Visual SLAM is more sensitive to light, and can’t
even work in places where there is no light or texture.
When analyzing the robustness of a Visual SLAM
system, its sensitivity to light is usually a concern.
According to the official OpenCV documentation,
the brightness and contrast of an image can be ad-
justed by
G(x, y) = αB(x, y) + β, α > 0. (10)
The brightness can be adjusted with β and the con-
trast can be changed with α. Obviously, the change in
contrast also leads to a change in brightness, so that in
this experiment only β will be discussed. The above
equation only holds when the pixel value is not satu-
rated, that is, 0 ≤G(x, y) ≤255. If the value is greater
than 255, it is forced to 255, and if the value is less
than 0, it is set to 0. By increasing or decreasing the
value of β 8 new image sequences were generated.
Figure 15 shows four of the image sequences, where
(a) and (d) have been saturated.
(a) β = -210 (b) β = -60 (c) β = 60 (d) β = 210
Figure 15: Variations of the brightness value β.
According to the trajectory accuracy error at dif-
ferent brightness shown in Figure 16, it can be con-
cluded that when the picture is not saturated, the lower
the brightness, the higher the accuracy of the system.
In general, the system shows good robustness against
changes in brightness.
0.0081
0.0092
0.0270
0.0410
0.0430
0.0478
0.0577
0.0601
0.0332
β=-210
β=-180
β=-120
β=-60
β=0
β=60
β=120
β=180
β=210
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
ATE (m)
Comparison of brightness variations
Figure 16: The accuracy of the system under different light-
ing conditions.
If we look at the extraction of feature points when
β = −210, β = 0 and β = 210 (Figure 17), we can
further verify our conclusion. Therefore, the decrease
in brightness is useful for the extraction of feature
points.
(a) β = −210 (b) β = 0 (c) β = 210
Figure 17: The extraction of feature points under different
brightness conditions.
3.8 Investigation of Feature Matching in
Agricultural Scenes
In this section, we will discuss feature matching in the
agricultural environment and the impact of dynamic
objects on the system. For a SLAM system, stable
feature points will become map points and stored in
the map, so the distribution of feature points can be
roughly judged through the sparse point cloud. Fig-
ure 18 is the sparse point cloud generated by Seman-
tic Visual SLAM and the corresponding 3D scene in
Blender. Obviously, feature points on plants are more
likely to generate final map points than watermelons.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
808

Figure 18: The virtual environment (left) and the recon-
structed sparse point cloud (right). The region in the circle
depicts a more detailed structure, due to stronger image gra-
dients which are used for feature detection and matching.
In other words, plants will generate feature points
with a better quality due to their characteristic image
gradients.
Based on this fact, several hypotheses can be pro-
posed:
1. Providing more high-quality corner patches in the
agricultural scene will lead to a better ATE
2. An increased number of high-quality corners will
increase the robustness of the system against dis-
turbances from dynamic objects
In order to evaluate the first hypothesis, three addi-
tional picture sequences are created on the basis of
16plants static. The difference between them is only
the number of plants. In order to assess the second hy-
pothesis, we added 5 ducks to these static agricultural
scenes to generate the corresponding dynamic picture
sequence (i.e. 16plants dynamic). These ducks move
continuously in the scene according to independent
trajectories while the camera is moving in the scene.
The specifications of new image sequences and
the number of the objects (static plants and dynamic
ducks) are listed in Table 1. The number of watermel-
ons is constant.
Table 1: The data sets used in the experiments and their
properties.
name plants ripe unripe ducks
0plants static 0 13 10 0
0plants dynamic 0 13 10 5
3plants static 3 13 10 0
3plants dynamic 3 13 10 5
16plants static 16 13 10 0
16plants dynamic 16 13 10 5
111plants static 111 13 10 0
111plants dynamic 111 13 10 5
In this experiment, we use SI-VSLAM and ORB-
SLAM2 to test all image sequences (4 static and 4 dy-
namic) respectively. The results are shown in Figure
19 and Figure 20.
0.0129
0.0088
0.0421
0.1317
0.0108
0.0094
0.0415
0.1382
0plants_static 3plants_static 16plants_static 111plants_static
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
ATE (m)
ATE (m) in static environment
ORB-SLAM2 SI-VSLAM
Figure 19: In a static environment, the accuracy of ORB-
SLAM2 and SI-VSLAM is similar.
0.9021
0.5145
0.1631
0.1305
0.0775
0.0214
0.0409
0.1029
0plants_dynamic 3plants_dynamic 16plants_dynamic 111plants_dynamic
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
ATE (m)
ATE (m) in dynamic environment
ORB-SLAM2 SI-VSLAM
Figure 20: SI-VSLAM is more robust than ORB-SLAM2
in dynamic environments.
4 CONCLUSION
This paper presents a method for the systematic eval-
uation of a Visual SLAM system, ORB-SLAM2,
which uses semantic segmentation as additional in-
put. It proposes to use semantic information to mask
out moving objects and to generate semantic point
clouds and octomaps accordingly. The evaluation was
focused on trajectory accuracy, mapping errors and
the response of the system when moving objects are
present in the scene. First, our implementation was
compared on the TUM RGB-D benchmark data set.
Second, custom synthetic environments were created
for conducting experiments in a controlled setting. By
using error models on RGB, Depth and Semantic Seg-
mentation data it was demonstrated what type of er-
rors can be expected on the output when the proposed
approach is used.
When there are no dynamic objects in the environ-
ment, SI-VSLAM and ORB-SLAM2 have similar ac-
curacy. The structure of the scene, i.e. identical plants
in our case, has a strong influence on mismatched fea-
ture points.
When there are dynamic objects in the scene,
SI-VSLAM can use semantic segmentation to filter
out the dynamic objects. Therefore, SI-VSLAM has
higher accuracy in a dynamic environment. It is worth
Error Evaluation of Semantic VSLAM Algorithms for Smart Farming
809

noting that ORB-SLAM2 got the highest accuracy
in the case of 111plants dynamic. Although ORB-
SLAM2 cannot filter out dynamic objects, the high-
quality feature points make the system more robust in
dynamic environments.
In order to increase the transparency of our work
and make it reproducible for other researchers, we
will provide the source code of our implementation
after the paper is published at https://github.com/
mjtq-slamlearning/SI-VSLAM.
In future work we plan to deploy and evaluate the
proposed system on a real watermelon field by work-
ing together with a local farmer. We will hopefully
have a watermelon detector ready and integrated in
our system until the next picking season.
REFERENCES
Belhedi, A., Bartoli, A., Bourgeois, S., Hamrouni, K., Sayd,
P., and Gay-Bellile, V. (2012). Noise modelling and
uncertainty propagation for TOF sensors. In Fusiello,
A., Murino, V., and Cucchiara, R., editors, Computer
Vision – ECCV 2012. Workshops and Demonstrations,
pages 476–485, Berlin, Heidelberg. Springer Berlin
Heidelberg.
Bharati, S., Khan, T. Z., Podder, P., and Hung, N. Q. (2021).
A Comparative Analysis of Image Denoising Prob-
lem: Noise Models, Denoising Filters and Applica-
tions, pages 49–66. Springer International Publishing,
Cham.
Campos, C., Elvira, R., Rodr
´
ıguez, J. J. G., M. Mon-
tiel, J. M., and D. Tard
´
os, J. (2021). ORB-
SLAM3: An accurate open-source library for visual,
visual–inertial, and multimap SLAM. IEEE Transac-
tions on Robotics, pages 1–17.
Cartucho, J., Tukra, S., Li, Y., S. Elson, D., and Giannarou,
S. (2020). Visionblender: A tool to efficiently gener-
ate computer vision datasets for robotic surgery. Com-
puter Methods in Biomechanics and Biomedical Engi-
neering: Imaging & Visualization, pages 1–8.
Everingham, M., Eslami, S. A., Van Gool, L., Williams,
C. K., Winn, J., and Zisserman, A. (2015). The pascal
visual object classes challenge: A retrospective. Inter-
national journal of computer vision, 111(1):98–136.
Free3D (2021). Free3D: Bird v1. https://free3d.com/
3d-model/bird-v1--94904.html. Accessed: 2021-11-
27.
Ganchenko, V. and Doudkin, A. (2019). Image semantic
segmentation based on convolutional neural networks
for monitoring agricultural vegetation. In Ablameyko,
S. V., Krasnoproshin, V. V., and Lukashevich, M. M.,
editors, Pattern Recognition and Information Process-
ing, pages 52–63, Cham. Springer International Pub-
lishing.
Heckenkamp, C. (2008). Das magische Auge – Grundla-
gen der Bildverarbeitung: Das PMD Prinzip. Inspect,
pages 25–28.
Kalisz, A., Particke, F., Penk, D., Hiller, M., and Thielecke,
J. (2019). B-SLAM-SIM: A Novel Approach to Eval-
uate the Fusion of Visual SLAM and GPS by Exam-
ple of Direct Sparse Odometry and Blender. In VISI-
GRAPP.
Li, Y. and Vasconcelos, N. (2019). REPAIR: Removing
representation bias by dataset resampling. In 2019
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 9564–9573.
Mur-Artal, R. and Tard
´
os, J. D. (2017). ORB-SLAM2:
An open-source SLAM system for monocular, stereo,
and RGB-D cameras. IEEE Transactions on Robotics,
33(5):1255–1262.
Nguyen, C. V., Izadi, S., and Lovell, D. (2012). Model-
ing kinect sensor noise for improved 3D reconstruc-
tion and tracking. In 2012 Second International Con-
ference on 3D Imaging, Modeling, Processing, Visu-
alization Transmission, pages 524–530.
Prokhorov, D., Zhukov, D., Barinova, O., Anton, K., and
Vorontsova, A. (2019). Measuring robustness of Vi-
sual SLAM. In 2019 16th International Conference
on Machine Vision Applications (MVA), pages 1–6.
Sturm, J., Engelhard, N., Endres, F., Burgard, W., and Cre-
mers, D. (2012). A benchmark for the evaluation of
RGB-D SLAM systems. In 2012 IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems,
pages 573–580.
Xiao, L., Heide, F., O’Toole, M., Kolb, A., Hullin, M. B.,
Kutulakos, K., and Heidrich, W. (2015). Defocus de-
blurring and superresolution for time-of-flight depth
cameras. In 2015 IEEE Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 2376–
2384.
Xuan, Z. and David, F. (2018). Real-time voxel based 3D
semantic mapping with a hand held RGB-D camera.
https://github.com/floatlazer/semantic slam.
Yu, C., Liu, Z., Liu, X., Xie, F., Yang, Y., Wei, Q., and Qiao,
F. (2018). DS-SLAM: A Semantic Visual SLAM to-
wards dynamic environments. 2018 IEEE/RSJ Inter-
national Conference on Intelligent Robots and Sys-
tems (IROS), pages 1168–1174.
Zhang, Z. and Scaramuzza, D. (2018). A tutorial on quanti-
tative trajectory evaluation for visual(-inertial) odom-
etry. In 2018 IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), pages 7244–
7251.
Zhuang, J., Wang, Z., and Wang, B. (2021). Video semantic
segmentation with distortion-aware feature correction.
IEEE Transactions on Circuits and Systems for Video
Technology, 31(8):3128–3139.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
810
