
“Robot Steganography”: Opportunities and Challenges
Martin Cooney
a
, Eric J
¨
arpe
b
and Alexey Vinel
c
School of Information Technology, Halmstad University, Halmstad, Sweden
Keywords:
Steganography, Robots, Autonomous Vehicle, Socially Assistive Robot, Speculative Prototyping.
Abstract:
Robots are being designed to communicate with people in various public and domestic venues in a perceptive,
helpful, and discreet way. Here, we use a speculative prototyping approach to shine light on a new concept
of robot steganography (RS): that a robot could seek to help vulnerable populations by discreetly warning
of potential threats: We first identify some potentially useful scenarios for RS related to safety and security–
concerns that are estimated to cost the world trillions of dollars each year–with a focus on two kinds of robots,
a socially assistive robot (SAR) and an autonomous vehicle (AV). Next, we propose that existing, powerful,
computer-based steganography (CS) approaches can be adopted with little effort in new contexts (SARs), while
also pointing out potential benefits of human-like steganography (HS): Although less efficient and robust than
CS, HS represents a currently-unused form of RS that could also be used to avoid requiring a computer to
receive messages, detection by more technically advanced adversaries, or a lack of alternative connectivity
(e.g., if a wireless channel is being jammed). Some unique challenges of RS are also introduced, that arise
from message generation, indirect perception, and effects of perspective. Finally, we confirm the feasibility
of the basic concept for RS, that messages can be hidden in a robot’s behaviors, via a simplified, initial user
study, also making available some code and a video. The immediate implication is that RS could potentially
help to improve people’s lives and mitigate some costly problems, as robots become increasingly prevalent in
our society–suggesting the usefulness of further discussion, ideation, and consideration by designers.
1 INTRODUCTION
At the crossroads between human-robot interaction
and secure communications, this design paper focuses
on the emerging topic of “robot steganography” (RS),
the hiding of messages by a robot.
Steganography is a vital way for vulnerable popu-
lations and their protectors to secretly seek help; e.g.,
encryption alone cannot prevent an adversary from
detecting that a message is being sent, which could
result in retribution. Such messages could also be
sent by interactive robots, which are expected to play
an increasingly useful role in the smart cities of the
near future by conducting dangerous, dull, and dirty
tasks, in a scalable, engaging, reliable, and perceptive
way. Here “robot” is defined generally as an embed-
ded computing system, comprising sensors and actua-
tors that afford some semi-autonomous, intelligent, or
human-like qualities. This comprises common tropes
like socially assistive robots (SARs; robots that seek
a
https://orcid.org/0000-0002-4998-1685
b
https://orcid.org/0000-0001-9307-9421
c
https://orcid.org/0000-0003-4894-4134
to help people through social interactions), as well as
systems that we might not normally think of as robots,
such as autonomous vehicles (AVs), smart homes, and
wearables (i.e., robots that we ride, live in, and wear),
which exhibit qualities conducive for steganography:
• Generality. Since robots typically contain com-
puters, existing computer-based steganography
(CS) approaches can be used.
• Multimodality. Robots can generate various sig-
nals, from motions to sounds, that could also en-
able “human-like” steganography (HS).
• Opacity. Robots tend to be complex, such that
most people do not understand how they work.
• Nascency. Robots are not yet common in every-
day human environments due to their current level
of technological readiness, which could allow for
occasional odd behavior to be overlooked (plausi-
ble deniability).
However, currently it is unclear how a robot can
seek to accomplish good via steganography; thus,
the goal of the current paper is to explore this gap:
Section 2 positions our proposal within the litera-
200
Cooney, M., Järpe, E. and Vinel, A.
“Robot Steganography”: Opportunities and Challenges.
DOI: 10.5220/0010820300003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 1, pages 200-207
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ture, guiding our approach in Section 3, which iden-
tifies two key scenarios related to indoor and outdoor
robots. The core premise in both scenarios, that mes-
sages can also be hidden in robot motions and sounds,
is then verified via a simplified user study reported
in Section 4, followed by discussion in Section 5.
Thereby, the aim is to stimulate thought about the pos-
sibilities for robots to help people in the near future.
2 RELATED WORK
Steganography approaches could be applied by robots
that are intended to be perceptive, intelligent, and con-
textually appropriate. This relates to a recent pro-
posal that interactive robots should not always single-
mindedly reveal truth, but will need to “lie” in various
situations, to provide good service (Wagner, 2016;
Isaac and Bridewell, 2017). For example, a robot
asked by its owner about their weight might not wish
to respond, “Yes, you are very fat”.
Toward this goal, some relevant behavioral ap-
proaches and concerns have been identified: Inter-
dependence theory has been applied, suggesting that
stereotypes can be used to initially estimate the cost,
value, and estimated success rate of lying (Wagner,
2016). Theory of mind has been espoused as a way
to allow robots to detect ulterior motives, to avoid
manipulation by humans with bad intentions (Isaac
and Bridewell, 2017). Additionally, a system was
developed to detect human lies based on eye move-
ments, response times, and eloquence, also verify-
ing that robots were lied to in a similar way as hu-
mans (Gonzalez-Billandon et al., 2019). Such work
has formed a basis for robots to interact more effec-
tively via discreet communication.
We believe that for similar reasons, not just false
utterances, but also an ability to send secret messages
to the right recipient via steganography could be use-
ful. Here, we propose that RS can be considered to
comprise two broad categories, HS and CS:
2.1 Human-like Steganography (HS)
Since ancient times, humans have used a variety of
audiovisual signals (Petitcolas et al., 1999) to warn of
threats, ask for help, signal action, or even to just sur-
reptiously poke fun at others. Similarly, a robot could
blink in Morse code or use gestures to warn of tor-
ture,
1, 2
and draw symbols like black dots, use a red
1
www.archives.gov/exhibits/eyewitness/html.php?
section=8
2
www.damninteresting.com/the-seizing-of-the-pueblo/
pen, or utter safe keywords like “Angela” or “Mino-
taur”, to warn of domestic violence.
3, 4, 5
Robots could
also leverage common everyday media tropes, from
gestures such as putting “bunny ears” behind some-
one’s head when a photo is taken, to facial expres-
sions behind someone’s back, or using a bird call to
signal an ally without alerting adversaries. One recent
study has started to examine a similar case for how an
underwater vehicle could mimic animal sounds (Jia-
jia et al., 2018), yet studies related to HS appear to
be strikingly rare–possibly due to the nascent state of
robotic technology, as well as some salient advantages
of CS, discussed next.
2.2 Computer-based Steganography
(CS)
The development of computers led to new possibil-
ities for highly efficient and robust steganography,
typically involving small changes to little-used, re-
dundant parts of a digital carrier signal. For ex-
ample, least significant bits (LSB), parity bits, or
certain frequencies can be used, in a carrier such
as digital text, visual media (image, video), audio
(music, speech, sounds), or network communications
(communicated frames/data packets) (Zieli
´
nska et al.,
2014). In particular, the latter is starting to be ex-
plored for robots; for example, de Fuentes and col-
leagues investigated CS in Vehicular Ad hoc Net-
works (VANETs) (de Fuentes et al., 2014). Our anal-
ysis suggested that, although CS has strong advan-
tages, there could still be a use for HS, since CS re-
quires a device to receive messages, is more likely
to be known to adversaries, and could be prevented
by disabling or jamming wireless communications.
However, what was unclear was how a robot can use
HS or CS to help people.
Toward starting to address this gap, we have pre-
viously reported in a short paper on some initial ideas
regarding vehicular steganography (Cooney et al.,
2021). The novel contribution of the current paper,
which extends the latter, is in exploring the “big pic-
ture” for RS, including opportunities and challenges.
3 METHODS
To explore the lay of the land, we adopted a specu-
lative prototyping approach that seeks to capture po-
3
www.bbc.com/news/blogs-trending-34326137
4
themighty.com/2020/01/domestic-violence-prevention-
sign-red-marker/
5
canadianwomen.org/signal-for-help/
“Robot Steganography”: Opportunities and Challenges
201

tentially important, plausible, and thought-provoking
scenarios in a concrete, easily-understood way, as
well as to test some part of the challenges that emerge
in a simplified user study (Dunne and Raby, 2013; En-
gelberg and Seffah, 2002).
Thus, in line with the “How Might We” design
method, rapid ideation sessions were first conducted
within the group, asking the question: How might a
robot help people by sending secret messages? Brain-
storming ideas were recorded without judgement,
then blended and grouped into short written narra-
tive scenarios. The aim was to capture a wide range
of ideas in a small number of potentially high-value,
plausible, uncertain, and different scenarios. Feasi-
bility from the perspective of current technology was
not used as a filter, given the speculative approach;
i.e., our initial concern was not how robot capabilities
could be implemented (such as the rich recognition
capabilities that will be required) but what could be
useful. This resulted in a total of eight initial sce-
narios, which were then analyzed, yielding insight
into some core themes: the kinds of problems that
would be useful to design solutions for, commonali-
ties, venues, interactive roles, cues to detect, and ac-
tions a robot could take, as well as some unique chal-
lenges.
Furthermore, two example scenarios were se-
lected, for two kinds of robot: a socially assistive hu-
manoid robot (SAR) and an autonomous vehicle (AV).
The former is an indoor robot with a focus on social
communication, especially for healthcare, whereas
the latter is an outdoor robot with a focus on locomo-
tion and transport; both offer exciting possibilities for
improving quality of life in interacting persons. The
example scenarios are presented below:
SAR. “Howdy!” called Alice, the cleaning robot at
the care center, as she entered Charlie’s room. Her
voice trailed off as she took in the odd scene in front
of her: Charlie appeared agitated, and she could see
bruises on his arms. The room was cold from an open
window, which had probably been opened hours ago,
and yesterday’s drinks had not been cleared away–
there was no sign that anything had been provided
for breakfast. Closing the window, Alice noticed a
spike of “worry” in her emotion module, directed to-
ward Charlie, whom she knew had a troubled rela-
tionship with Oliver, his main caregiver. The other
day, Charlie had acted disruptively due to his late-
stage dementia. To this, Oliver had expressed frus-
tration and threatened punishment; with his history
of crime, substance abuse, unemployment, and men-
tal health problems, this might not be merely an idle
threat. But, there might be some explanation that Al-
ice didn’t know about, and she didn’t have permission
to contact authorities, since a false report could have
highly negative consequences. Sending a digital mes-
sage would also probably not be wise, since the mat-
ter was urgent, and Oliver and the rest of the group
had access to her logs. When she headed over to
the reception, there was Oliver talking to Bob. Alice
wanted to let Bob know as soon as possible without
alerting Oliver, so she surreptitiously waved to Bob
behind Oliver’s back to get his attention and flashed
a message on her display that she would like to ask
him to discreetly check in on Charlie as soon as pos-
sible. Bob nodded imperceptibly, and Alice went back
to cleaning. With Bob’s help, Alice was sure that
Charlie would be okay.
AV. “Hey!” KITTEN, a large truck AV, inadvertently
exclaimed. “Are you watching the road?” Her driver,
Oscar, ignored KITTEN, speeding erratically down
the crowded street near the old center of the city with
its tourist area, market, station, and school, which
were not on his regular route. KITTEN was wor-
ried about Oscar, who had increasingly been show-
ing signs of radicalization–meeting with extremists
such as Mallory–and instability, not listening to vari-
ous warnings related to medicine non-adherence, de-
pression, and sleep deprivation. But she wasn’t com-
pletely sure if Oscar was currently dangerous or im-
paired, as his driving was always on the aggressive
side; and, KITTEN didn’t want to go to the police–if
she were wrong, Oscar might lose his job. Or, even if
she were right and the police didn’t believe her, Os-
car could get angry and try to bypass her security fea-
ture, or find a different car altogether, and then there
would be no way to help anymore. At the next in-
tersection, KITTEN decided to use steganography to
send a quick “orange” warning to nearby protective
infrastructure, comprising a monitoring system and
anti-tire spikes that can be raised to prevent vehicles
from crashing into crowds of pedestrians–while plan-
ning to execute an emergency brake and call for help
if absolutely required.
The scenarios suggested that RS might be useful
when two conditions hold:
• There is a High Probability of Danger. If the
robot is not completely sure about the threat, or
has not been given the right to assess such a threat
as the consequences of a mistake could be ex-
tremely harmful, the robot could require another
opinion, possibly through escalation to a human-
in-the-loop. In particular, this could occur when
there is a possibility of an accident or crime: Traf-
fic accidents are globally the leading killer of peo-
ple aged 5-29 years, with millions killed and in-
jured annually
6
, and crimes are estimated to cost
6
www.who.int/publications/i/item/9789241565684
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
202
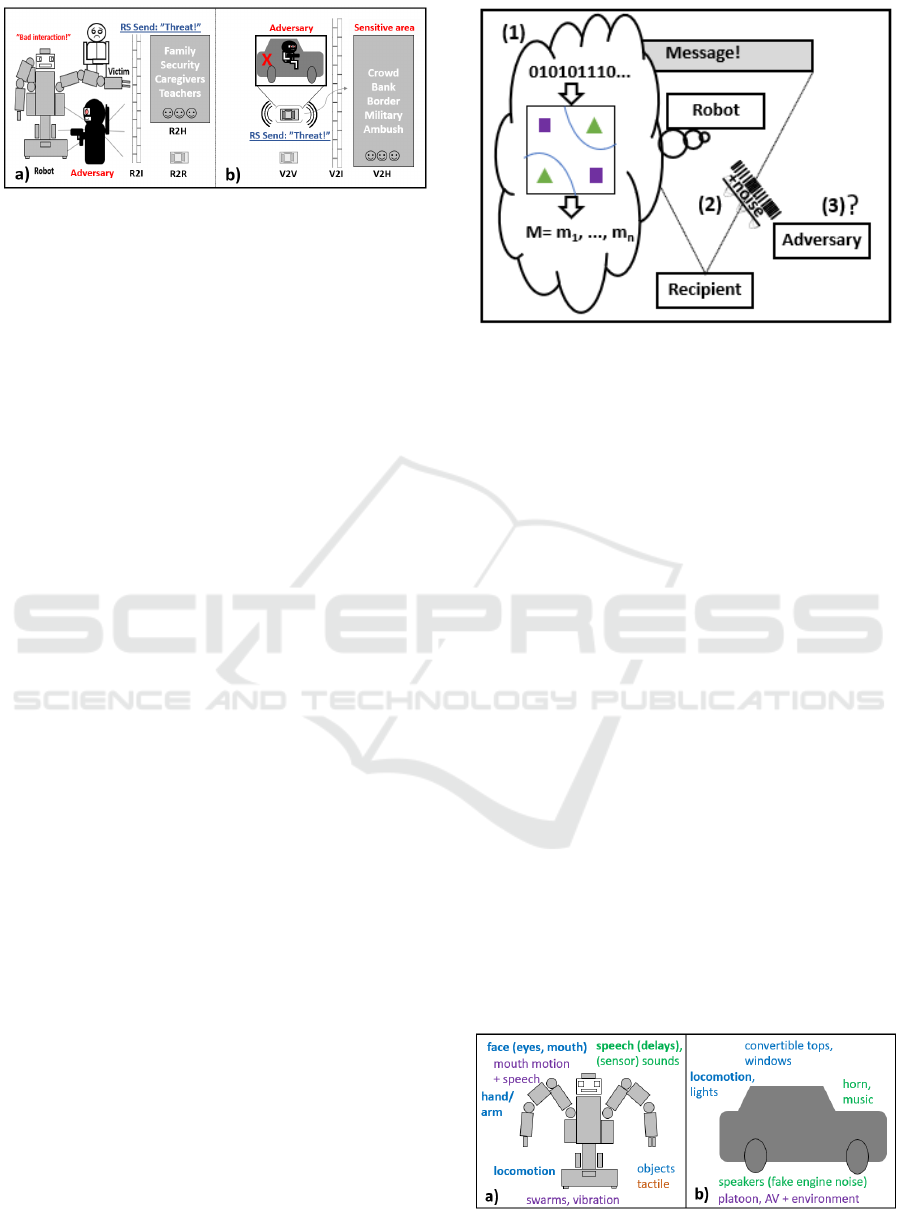
Figure 1: Scenarios: (a) SAR. Someone might require pro-
tection from an undesirable interaction, (b) AV. A possible
threat is approaching a sensitive area.
trillions of dollars each year (DeLisi, 2016).
• Conventional Communication is Undesirable.
If direct messages might be detected (e.g., in logs
or by monitoring wireless traffic), message hiding
could be a way to reduce the risk of reprisals and
exacerbating the problem. The intended recipient
might also not have a computer, or there might
be a lack of connectivity preventing a robot from
communicating a problem–with or without covert
properties (e.g., because an adversary jammed the
wireless channel).
It should be clear than an adversary could com-
pletely block any communications from a robot,
by shutting it off, destroying it, abandoning it, or
modifying it to either not send messages or send
false messages. However, we believe that adver-
saries will not do this in various cases, if a robot
is not seen to interfere (e.g., by sending uncon-
cealed messages): Disabling a robot could call un-
wanted attention to an adversary, in the same way
as restraining any nearby humans. There might be
many robots and devices in the vicinity. The robot
could be still perceived as useful for some purpose
(e.g., an AV carrying the adversary). And, people
are accustomed to using technologies that could
be used against them for convenience, from cam-
eras that could be used for monitoring, to vehicles
that could cause a deadly accident.
Thus, alternatives exist: RS (CS, HS), encryption
only, or direct communication. When the above con-
ditions do not hold, a different approach than RS can
be used; for example, a robot could directly call for
help if it has witnessed a life-threatening situation and
the threat is perfectly clear, like if shots have been
fired–or if the robot has a strong belief that the adver-
sary could not detect a call for help.
A detailed comparison of scenarios for SARs and
AVs, including settings, informative cues, and poten-
tial robot actions, is presented in Table 1, and the gist
is visualized in Fig. 1.
Additionally, the scenarios also suggested some
“unique” aspects to RS that differ from traditional
Figure 2: Unique challenges of robot steganography (RS):
(1) message generation, (2) indirection, (3) perspective.
steganography, as shown in Fig. 2:
• Generation. Instead of humans coming up with
messages to send over computers, an AV must it-
self generate a message from sensed information.
• Indirection. In HS, files are not passed di-
rectly from sender to recipient, introducing risks
of noise and lower data transmission rates.
• Perspective. In HS, unlike e.g., video motion
vector steganography, a robot could control its
motion to generate an anisotropic message visi-
ble only at some specified angle and distance; au-
dio reception could also be controlled via “sound
from ultrasound” (Pompei, 2002) or high fre-
quency to send location- or age-specific sounds.
Furthermore, various audiovisual carriers could
be used for HS, as shown in Fig. 3: Visu-
ally, locomotion–e.g., variance over time in posi-
tion and orientation (path, or trajectory), velocity,
or acceleration–could be used to hide messages de-
tectable via communicated GPS, videos, or odome-
try; other visual signals could include lights, opening
or closing of windows, and convertible tops. Aurally,
speakers that generate engine noise (like soundak-
tors), or even music players or a horn could be used.
More complex approaches could be multimodal, us-
ing a platoon, swarm of drones, or even the environ-
Figure 3: Carriers: (blue) visual, (green) audio, (purple)
multimodal, (brown) other.
“Robot Steganography”: Opportunities and Challenges
203
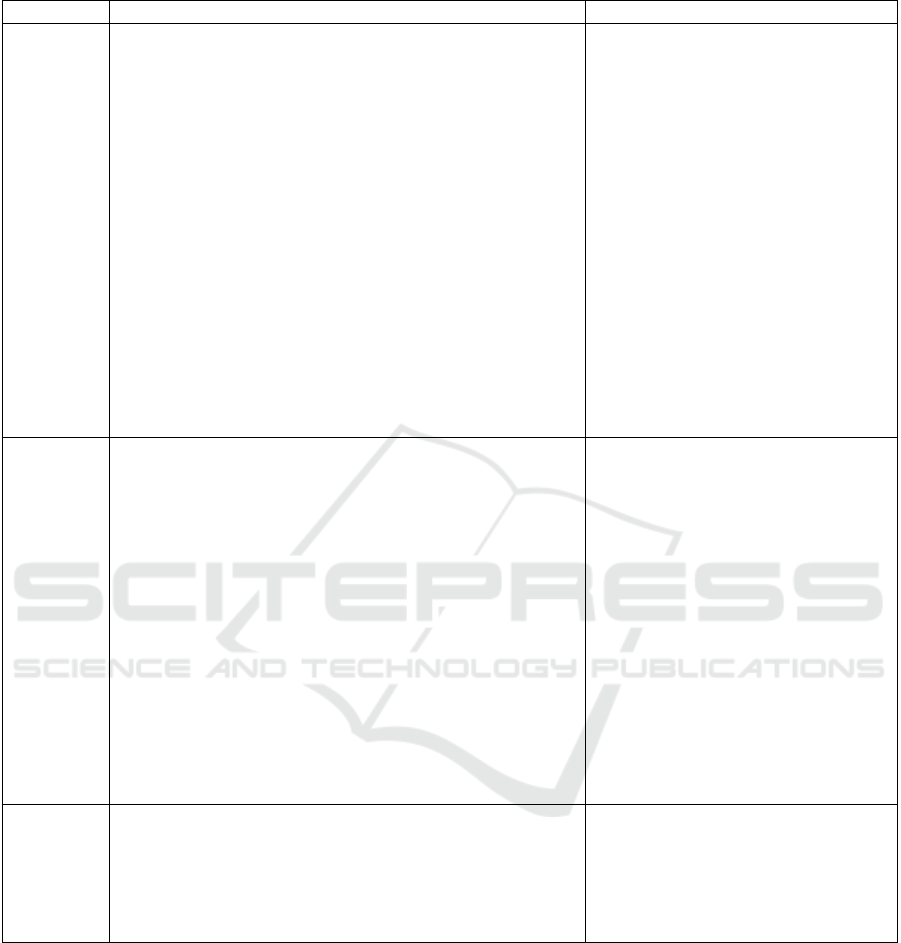
Table 1: Some fundamental concerns for RS with SARs and AVs.
SARs AVs
Scenarios SARs could help with preventing the potential abduction,
abuse, or homicide of vulnerable populations such as el-
derly, children, persons with special needs (e.g., demen-
tia, autism, blindness, motor impairment, depression),
homeless persons, spouses, or members of some targeted
group (e.g., whistleblowers, freedom fighters, persecuted
minorities, or prisoners). The main case considered here
was a direct threat from a human adversary. Typically, an
adversary might seek private access to a victim (e.g., via
removal to a second location) to avoid abuse being wit-
nessed; intentions could include domestic violence, kid-
napping, bullying, assault, robbery, threat, murder, mi-
croaggression, retribution, battery, or rape–within transi-
tional, secluded, or dangerous settings such as a care cen-
ter, school, home, bar, night club, store, lot, station, street
or park. The robot could be accompanying a person, or
just happen to be in the area to conduct some other task,
such as healthcare, cleaning, or delivery.
An AV could be involved in reckless
driving (hit-and-run, drunk driving),
trafficking (drugs, humans or other
contraband), robbery (at a bank,
store, or carjacking), or violent
crime (homicide or abduction). Typ-
ically, an adversary (a lone individ-
ual, small group, or representative
of an oppressive nation) might ex-
hibit malevolent cues during transit
to a sensitive area such as a bor-
der, bank, military site, or crowded
or dangerous location. The main
case considered involved a direct
threat from a human adversary trav-
elling inside the AV, although ex-
ternal adversaries (humans or AVs)
could also be detected.
Cues Indicators could include: (1) Sudden negative or odd
changes in a potential victim’s state or behavior (includ-
ing physical signs such as bruises; emotional displays of
pain, fear, or anger; or behavioral subservience). Such
cues could potentially be detected via anomaly or change
point detection, during monitoring of health, emotions,
and activities. (2) High risk factors such as violent, un-
justified behavior or emotional displays from a poten-
tial adversary, especially if there is a large perceived
force imbalance, possibly in conjunction with a history of
fighting, threats, crime, substance abuse, unemployment,
high stress, and mental health problems. Violent be-
havior could be detected via cameras, microphones, and
touch sensors on a SAR or in the environment, whereas
historic data could be accessed from police or medical
records.
Targets for detection could include
speeding, weaving, tailgating, and
failing to yield or signal, in man-
ual driving mode–and more gen-
erally, hiding packages; unhealthy
behavior (medicine non-adherence
with depression or sleep depriva-
tion); and being armed and masked
without occasion. Problematic driv-
ing could be detected from surveil-
lance camera data; health problems
by collating data from electronic pill
dispensors and smart homes; and
threatening gear from cameras in-
side an AV.
Actions Warnings could be sent to family such as parents, secu-
rity, teachers, or care staff (R2H), as well as doors or ve-
hicles (R2I and R2R), while also potentially preventing
the victim from being taken away by lying about where-
abouts, stalling, and evading.
Warnings could be sent to border
or bank security (V2H), protective
infrastructure (e.g., anti-tire spikes;
V2I), or nearby AVs or platoon
members (V2V), while also poten-
tially seeking to delay or obstruct.
ment, like birds flying plus an AV’s motion; use rare
modalities like heat; or use delays, ordering, modality
selection, and amplitudes.
Implementations could leverage various work that
has looked at how robots can perceive signals and or-
ganize knowledge (e.g., based on Semantic Web lan-
guages like W3C Web Ontology Language (OWL)),
and information can be embedded in a message as
bits or pulses using a code such as ASCII, Morse,
or Polybius squares. Message generation could po-
tentially be formalized as a Knapsack problem, and a
steganographic force could be added to a Social Force
model to design motions incorporating messages, al-
though details for these ideas cannot be given within
the scope of this paper.
4 USER STUDY
To fully realize the speculative scenarios in the pre-
vious section, various advanced capabilities will be
required, but the main premise for RS–that messages
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
204

can be hidden in a robot’s motions and sounds in a
way that is not easy to detect by potential adversaries–
seemed to require some immediate verification. Thus,
to check the basic feasibility of this idea, a small user
study was conducted, based on implementing some
simplified algorithms. Of the two example scenarios,
we wanted to focus on one for our initial prototyping,
and to develop an actual physical prototype where
real-world problems might emerge, rather than a sim-
ulation; since an error with an AV could be lethal,
we selected the basic idea of the SAR scenario for
our first exploration. In this scenario, a SAR, Alice,
uses RS to send various messages to a protector, Bob,
in such a way that an adversary, Oliver does not see
them.
4.1 Participants
20 faculty members and students at our university’s
School of Information Technology participated in an
online survey (40% were female, 50% male, and 10%
preferred not to say; average age was 41.8 years with
SD= 10.3; and six nationalities were represented, with
Swedish by far the most common (60%)). Partic-
ipants received no compensation. Ethical approval
was not required for this study in accordance with the
Swedish ethics review act of 2003 (SFS no 2003:460),
but principles in the Declaration of Helsinki and Gen-
eral Data Protection Regulation (GDPR) were fol-
lowed: e.g., in regard to written informed consent.
4.2 Procedure
Similar to our previous study on audio steganogra-
phy (J
¨
arpe and Weckst
´
en, 2021), participants were
sent links to a Google Forms survey, which took ap-
proximately three minutes to complete. Participants
played the part of the adversary, watching two pairs of
videos of a SAR moving and speaking. In one video
of each pair, messages were hidden in the robot’s
behaviors, toward saving a new victim, Stacey. Af-
ter watching each pair of videos, participants noted
which one they thought contained a hidden message.
For safety and simplicity, the Baxter robot was used,
which is a SAR that is easily programmed to commu-
nicate audiovisually via movements, a face display,
and speech utterances.
4.3 Conditions
Two conditions were used, steganography (present or
absent) and modality (visual or audio), based on our
analysis of channels that can be used for HS. Thus,
four videos (two pairs) were prepared, as depicted in
Figure 4: Audiovisual steganography was applied to (a) vi-
sual signals (gripper motions, facial display, arm motions),
as well as (b) sounds (speech delays and WAV files).
Fig.4. Both of the steganography videos featured ex-
amples of both CS and HS.
Visual Steganography: The first two videos showed
the robot greeting an adversary, who has suddenly ap-
peared. (The videos were recorded from the adver-
sary’s perspective.) The steganography video used
three visual carriers to send hidden messages to an
off-camera observer to the left, intended to be diffi-
cult to perceive by the adversary. The robot initially
appeared as if it is vacuum cleaning, while opening
and closing a gripper to express “SOS” through Morse
code to the off-camera observer; the gripper’s motion
and clicking sound were masked via its other arm–
demonstrating the perspective property–and the vacu-
uming sound. Next, the robot raised its arm in greet-
ing, during which arm angles specified as floats were
recorded in a motion file and constantly published on
Robot Operating System (ROS) channels; there, an
ASCII message, “SOS”, was embedded in the LSB.
Also, the ASCII message “SOS! Stacey needs your
help!” was hidden in the image data used for the
robot’s face via LSB. Thus, the messages were con-
veyed via “pure” HS (not requiring a computer to de-
tect), HS closer to CS (a human-like motion, but re-
quiring a computer to read), and CS. It wasn’t clear if
participants might notice strangeness in the clicking
of the gripper, vibrations due the concealed motion,
or the roughness in the robot’s arm motion due to the
added message.
Audio Steganography: The second pair of videos
showed a robot speaking to an adversary. The
steganography video used two audio carriers to hide
messages. Speech utterance delays were used to hide
the message “SOS” in a “simplified” Morse code
(100ms dot, 200ms dash). The message is read by
using the sounddevice library to detect volume, with
a model of normal delays–exemplifying the indirec-
tion property. Some simple heuristics were used in-
cluding hysteresis in volume for speech start and end,
and a model for the minimal length of a speech sound.
Furthermore, the ASCII message “SOS! Stacey needs
your help!” was again hidden, in the LSB of a WAV
“Robot Steganography”: Opportunities and Challenges
205

file which the robot uses to say “hello”. Thus, the sig-
nals were predominantly HS and CS, respectively. It
wasn’t clear if participants might notice extra delays
or roughness in the steganography condition.
The reason that transmission is hidden in this case
is that a SAR is expected to use its display, motions,
and sounds to interact–normally there is no suspicion
that such behaviors have any other hidden commu-
nicative purpose.
4.4 Results
If the robot was successful at hiding messages, the
rate at which participants could identify the videos
with hidden messages should have been around ran-
dom chance (50%). Else, if the robot failed to hide
its messages, the rate should have been higher (e.g.,
closer to 100%).
In this study, participants guessed the file with the
hidden messages 55% and 50% of the time (11 and
10 participants respectively; thus, 21 out of 40 times,
or 52.5%, where 19 out of 40 times, or 47.5%, the
guesses were wrong). A binomial test confirmed that
this success rate was not more common than can be
expected by random chance (50%), for the results
of the first pair of videos (p = .8), the second pair
(p > .9), and all of the data together (p = .9). In
other words, the robot had performed as we had ex-
pected. Also, of 13 participants who left comments,
ten explicitly stated that they could not see obvious
differences and guessed; three indicated cues such
as nodding, color changes, pauses and blinking that
could not be clearly related to changes expected due
to embedding messages, possibly a result of parei-
dolia (a human tendency to see patterns even where
none exist). No participant correctly identified cues
that might have resulted from adding the hidden mes-
sages.
Thus, our hypothesis was supported, and this sim-
plified check confirmed that messages can be suc-
cessfully concealed in some common robot behaviors
without humans suspecting. While some messages re-
quire the recipient to have a computer, others, like the
robot’s gripper communicating via Morse code, can
be seen by the naked eye.
5 DISCUSSION
In summary, the contribution of the current work is
proposing some theoretical and practical considera-
tions for a robot to convey hidden messages to help
people, which we have dubbed robot steganography
(RS):
• A speculative approach revealed
– applications to traffic safety and crime preven-
tion
– three unique qualities of RS relating to message
generation, indirection, and perspective
– potential carriers, as well as initial ideas for sig-
nal generation.
• A simplified, initial user study confirmed that
messages can be hidden in various robot behav-
iors, also demonstrating a first example of RS.
• Additionally, a video and code have been made
freely available to help guide others who might be
interested in this topic.
7, 8
As robots become increasingly prevalent, the re-
sults suggest the usefulness of further discussion and
ideation around RS, which could potentially help save
people’s lives and could be easily implemented in
some contexts: Robots can already use established
approaches for computer-based steganography (CS)
to communicate with computers, robots, or humans
equipped with computers. Moreover, human-like RS
(HS) can also be used to communicate even with hu-
mans who do not have access to a computer (e.g., this
can be as simple as merely gesturing or displaying a
message behind someone’s back), when technically
capable adversaries might be aware of more common
CS approaches, or when conventional CS channels
are obstructed. Furthermore, as noted, RS can com-
plement other techniques such as encryption or lying.
5.1 Limitations and Future Work
This work represents only an initial investigation into
a few topics related to RS and is limited by its na-
ture, comprising speculation and simplified prototyp-
ing approach. It should be stressed that it is neither
possible, nor the goal of the current paper, to fully de-
scribe and test all RS methods that could exist, or to
fully realize the scenarios identified. Other important
scenarios, carriers, and motion generation approaches
might exist for other kinds of robots, and the simpli-
fied user study only checked the feasibility of RS in
a prototype SAR–much more work will be required
to realize RS in the real world. As well, the degree to
which RS will be useful is not yet completely clear, as
both CS and HS can result in lower transmission rates
than merely encrypting or sending direct communica-
tions, which might not be justified if intended recipi-
ents are expected to always be monitoring a computer
7
youtu.be/vr3zlva6cCU
8
github.com/martincooney/robot-steganography
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
206

or adversaries are expected to never be technically ca-
pable.
Future work will also explore allostatic (preventi-
tive) interventions, steganalysis (detection of hidden
messages), ethics, and perception of dangerous sce-
narios. For example, could robots use conversation or
touch to defuse situations, making adversaries less an-
gry and victims feel safer and better (Akiyoshi et al.,
2021)? Will an ability to help people via RS, con-
ducting vicarious inference and showing empathy, fa-
cilitate acceptance of robots and positive long-term
interactions (Lowe et al., 2019)? By shining light on
such questions, we aim to bring a fresh perspective to
possibilities for robots to create a better, safer society,
which could also facilitate acceptance and trust in the
use of robots in our everyday lives.
ACKNOWLEDGEMENTS
We thank our colleagues who participated in scenario
building or the user study!–and gratefully acknowl-
edge support from the Swedish Knowledge Founda-
tion (KKS) for the SafeSmart “Safety of Connected
Intelligent Vehicles in Smart Cities” Synergy project
(2019–2023), the Swedish Innovation Agency (VIN-
NOVA) for the “Emergency Vehicle Traffic Light Pre-
emption in Cities – EPIC” project (2020–2022) and
the ELLIIT Strategic Research Network.
REFERENCES
Akiyoshi, T., Nakanishi, J., Ishiguro, H., Sumioka, H., and
Shiomi, M. (2021). A robot that encourages self-
disclosure to reduce anger mood. IEEE Robotics and
Automation Letters, 6(4):7925–7932.
Cooney, M., J
¨
arpe, E., and Vinel, A. (2021). “Vehicu-
lar Steganography”?: Opportunities and Challenges.
Electronic Communications of the EASST, 80.
de Fuentes, J. M., Blasco, J., Gonz
´
alez-Tablas, A. I., and
Gonz
´
alez-Manzano, L. (2014). Applying information
hiding in VANETs to covertly report misbehaving ve-
hicles. International Journal of Distributed Sensor
Networks, 10(2):120626.
DeLisi, M. (2016). Measuring the cost of crime. The hand-
book of measurement issues in criminology and crim-
inal justice, pages 416–33.
Dunne, A. and Raby, F. (2013). Speculative everything:
design, fiction, and social dreaming. MIT press.
Engelberg, D. and Seffah, A. (2002). A framework for rapid
mid-fidelity prototyping of web sites. In IFIP World
Computer Congress, TC 13, pages 203–215. Springer.
Gonzalez-Billandon, J., Aroyo, A. M., Tonelli, A., Pasquali,
D., Sciutti, A., Gori, M., Sandini, G., and Rea, F.
(2019). Can a robot catch you lying? a machine learn-
ing system to detect lies during interactions. Frontiers
in Robotics and AI, 6:64.
Isaac, A. M. and Bridewell, W. (2017). Why robots need to
deceive (and how). Robot ethics, 2:157–172.
J
¨
arpe, E. and Weckst
´
en, M. (2021). Velody 2—Resilient
High-Capacity MIDI Steganography for Organ and
Harpsichord Music. Applied Sciences, 11(1):39.
Jia-jia, J., Xian-quan, W., Fa-jie, D., Xiao, F., Han, Y., and
Bo, H. (2018). Bio-inspired steganography for secure
underwater acoustic communications. IEEE Commu-
nications Magazine, 56(10):156–162.
Lowe, R., Alm
´
er, A., Gander, P., and Balkenius, C.
(2019). Vicarious value learning and inference in
human-human and human-robot interaction. In 2019
8th International Conference on Affective Comput-
ing and Intelligent Interaction Workshops and Demos
(ACIIW), pages 395–400. IEEE.
Petitcolas, F. A., Anderson, R. J., and Kuhn, M. G. (1999).
Information hiding-a survey. Proceedings of the IEEE,
87(7):1062–1078.
Pompei, F. J. (2002). Sound from ultrasound: The para-
metric array as an audible sound source. PhD thesis,
Massachusetts Institute of Technology.
Wagner, A. R. (2016). Lies and deception: Robots that
use falsehood as a social strategy. Robots that talk
and listen: Technology and social impact. De Grutyer
https://doi. org/10.1515/9781614514404.
Zieli
´
nska, E., Mazurczyk, W., and Szczypiorski, K. (2014).
Trends in steganography. Communications of the
ACM, 57(3):86–95.
“Robot Steganography”: Opportunities and Challenges
207
