
Presenting a Novel Pipeline for Performance Comparison of V-PCC and
G-PCC Point Cloud Compression Methods on Datasets with Varying
Properties
Albert Christensen, Daniel Lehotsk
´
y, Mathias Poulsen and Thomas Moeslund
Visual Analysis and Perception Lab, Aalborg University, Rendsburggade 14, DK-9000, Aalborg, Denmark
Keywords:
Point Cloud Compression, 3D Compression, V-PCC, G-PCC, Draco, Performance Comparison Pipeline.
Abstract:
The increasing availability of 3D sensors enables an ever increasing amount of applications to utilize 3D cap-
tured content in the form of point clouds. Several promising methods for compressing point clouds have been
proposed but lacks a unified method for evaluating their performance on a wide array of point cloud datasets
with different properties. We propose a pipeline for evaluating the performance of point cloud compression
methods on both static and dynamic point clouds. The proposed evaluation pipeline is used to evaluate the
performance of MPEG’s G-PCC octree RAHT and MPEG’s V-PCC compression codecs.
1 INTRODUCTION
With the increasing availability of 3D sensors such
as LiDARs, time-of-flight cameras, stereo cameras
etc. more objects and scenes are captured as point
clouds. Point clouds are being used in a wide array
of applications and tasks such as autonomous driv-
ing (Li et al., 2021), virtual and augmented reality
(Bruder et al., 2014), object scanning (Chen et al.,
2016), scene scanning (Ingale and J., 2021) and ob-
ject detection and segmentation (Bello et al., 2020).
A point cloud is a simple data structure consist-
ing of a list of points containing 3D geometric in-
formation and additional attribute information such as
colours, normals, and reflectance, with no correlation
between the points. Since objects and scenes cap-
tured as point clouds can contain millions of points,
the storage and bandwidth requirements are often un-
feasible. Therefore, there exists a need for effective
point cloud compression codecs.
Several methods for compressing point clouds
have been proposed. Amongst these, the most no-
table are Draco by Google
1
, and the G-PCC (Mam-
mou et al., 2019) and V-PCC (MPEG, 2020) proposed
by the Moving Pictures Expert Group (MPEG), with
compression standards from the Joint Photographic
Expert Group (JPEG) still underway (JPEG, 2020).
In their call for proposals (MPEG, 2017), MPEG
differentiate between 3 types of point clouds - static
objects and scenes, dynamic objects, and dynamic
point cloud acquisition. While this categorization of
1
https://github.com/google/draco
point clouds are relevant for the use cases of MPEG’s
compression codecs, different point cloud compres-
sion methods might benefit from being evaluated on a
wider set of datasets with a different set of properties,
reflecting other use cases.
G-PCC was made for static objects and scenes
and dynamic point cloud acquisition, while V-PCC
was made to compress dynamic objects. G-PCC, V-
PCC (Schwarz et al., 2019)(Li et al., 2020)(Kim et al.,
2020)(Liu et al., 2020) and compression codecs made
since are often evaluated on the 8iVSLF dataset (Kri-
vokuca et al., 2018), while before the standardiza-
tion efforts of MPEG, compression algorithms would
often be evaluated on completely different datasets
(Huang et al., 2008)(Fan et al., 2013)(Mekuria et al.,
2017a). Comparison between different methods are
further complicated by the datasets used for evalua-
tion of some deep learning methods for compression,
as they are often different (Quach et al., 2019)(Que
et al., 2021).
The work of (Wu et al., 2020) aimed to solve
some of these problems, by introducing their PCC
arena framework which compared different compres-
sion methods on multiple datasets. This work is lim-
ited to static datasets only and the compression of ge-
ometry only. PCC arena is the work closest to ours.
In this paper, we propose a comprehensive
pipeline for evaluating the compression performance
of codecs in a reproducible manner that allows for
easy comparison on a diverse set of publicly avail-
able point cloud datasets. Both dynamical and static
datasets are used with and without RGB attribute in-
Christensen, A., Lehotský, D., Poulsen, M. and Moeslund, T.
Presenting a Novel Pipeline for Performance Comparison of V-PCC and G-PCC Point Cloud Compression Methods on Datasets with Varying Properties.
DOI: 10.5220/0010820200003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
387-393
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
387

formation. We demonstrate the evaluation pipeline
with the V-PCC, G-PCC (RAHT / Octree) and Draco
compression codecs. The framework is modular and
can be extended with more datasets and more com-
pression codecs. Finally, we also propose an objective
metric describing the density of a point cloud as well
as a new dataset for dense static point cloud compres-
sion named MIA-Heritage.
2 METHOD
When evaluating the performance of point cloud com-
pression codecs, a set of descriptive performance met-
rics have to be chosen and evaluated on a diverse set
of benchmark datasets. We propose an evaluation
pipeline capable of comparing the compression per-
formance of various compression codecs on both dy-
namic and static datasets, with a set of quality metrics
that allows for direct comparison.
2.1 Evaluation Metrics
Evaluation metrics are needed to describe the perfor-
mance of the different compression methods. To this
end we use objective quality metrics, which describes
the quality of the reconstructed point cloud after com-
pression and decompression.
The comparison pipeline adopts the point-to-point
quality metric (D1), proposed by (Mekuria et al.,
2017b), as it is a widely used objective quality met-
ric (Schwarz et al., 2019)(Graziosi et al., 2020)(Kim
et al., 2020). D1 is the peak signal-to-noise ratio
(PSNR) reported in dB for geometry and the 3 colours
in the YCrCb colour spectrum respectively. The error
is the Euclidean distance in the geometric dimension
and the colour dimensions for the nearest neighbours
between the original and the degenerated point cloud.
Instead of using 3 different colour values, one for each
YCrCb channel as MPEG suggest, it has been cho-
sen to use the Euclidean distance in YCrCb colour
space to calculate one merged metric for the colour
PSNR. Using a single value to represent the colour
PSNR allows for easier and more direct comparison
of the codec’s performance on compressing the colour
attributes.
The Bjøntegaard-Delta (BD) metrics
(Bjøntegaard, 2001) are commonly used in the
video codec community for comparing the perfor-
mance of two different compression codecs against
each other. It is also widely used for comparing lossy
point cloud codecs at various bit rates (Gu et al.,
2019) (Santos et al., 2021) (Wang et al., 2021) (Xiong
et al., 2021). There exist two BD-metrics:
• BD-PSNR: The average PSNR difference in dB
for the same bit rate.
• BD-Rate: The average bit rate difference in per-
cent to produce the same PSNR.
The BD-metrics are found by fitting the computed
D1 PSNR values for their corresponding bit rate val-
ues to a third degree logarithmic which is done for
each codec. The integral difference between codecs
can then be computed, and the average difference can
be found by dividing the integral difference over a dis-
tance. We adopt the BD-PSNR metric as the primary
evaluation metric.
The bits per input point (bpp) is chosen in favor
of the conventionally used bit rate. Bpp is a normal-
ized bit rate, making it easier to compare compression
rates of point clouds of various sizes. Bpp describes
how many bits on average that is required to represent
a single point of the input point cloud. The number
of points in the input point cloud is used instead of
the number of points in the output point cloud as the
number of points might be reduced during the com-
pression process.
2.2 Point Cloud Properties
Point clouds differ in their properties with their in-
tended usage. The compression performance of a
compression method might therefore vary between
point clouds with different properties. We propose a
set of 5 binary point cloud properties for categorizing
different point clouds.
• Type (Scene / Object)
• Density (Sparse / Dense)
• Temporality (Static / Dynamic)
• View (Single-view / Multi-view)
• Information (Geometry / Geometry + Attributes)
One element from each pair can be combined with
any other element from the following pairs. By com-
bining these characteristics, it is possible to gener-
alise point cloud types. The first property, type, de-
scribes what is captured by the point cloud, as point
clouds can be divided into scenes or single objects
(Wu et al., 2020). A scene can be considerably more
complex than a single object. The second property,
density, describes the number of points. Dense point
clouds have a lot of points per unit area, while sparse
point clouds are relative thinly distributed. The third
property, temporality, describes whether it is a sin-
gle static frame or a dynamic point cloud sequence of
frames (Cao et al., 2019). The fourth property, view,
describes the angle from which the point cloud was
captured. Multi viewpoint clouds provide up to a 360°
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
388
view of the captured scene or an object. Finally, the
property information relates to the information en-
coded within the data. Geometry means that the point
cloud only consists of XYZ data, while geometry +
other attributes could be a combination of XYZ and
RGB data. However, point clouds may also include
additional information such as normals, reflectivity,
etc.
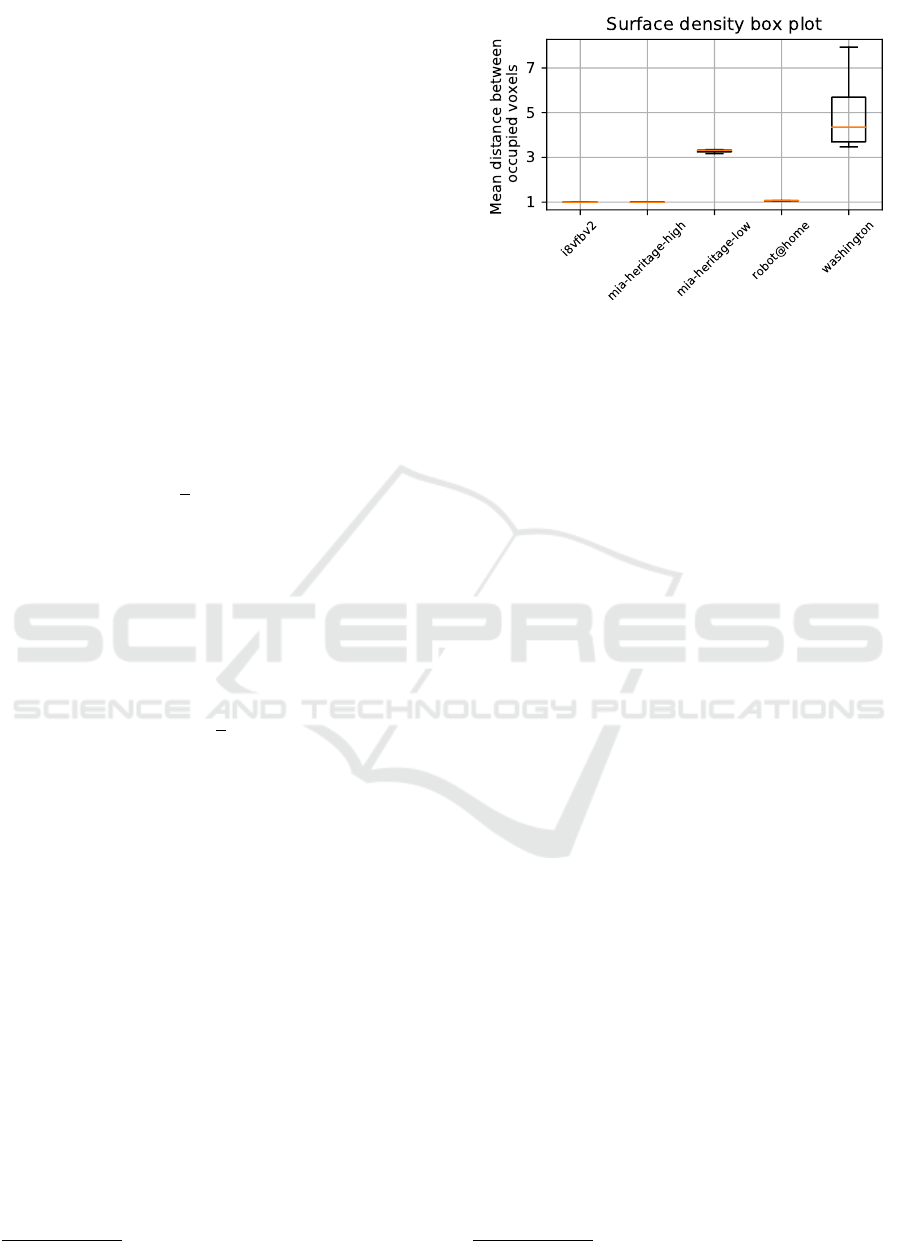
2.3 Surface Density
To the best of the authors knowledge the surface den-
sity property is poorly defined in the literature. Thus,
we propose surface density as the metric that quanti-
fies the density property of a point cloud once it has
been voxelized. Surface density for a voxelized point
cloud is defined as the mean of the distance in voxels
to the nearest neighbour for each voxel in the point
cloud, see Equation (1).
P
sd
=
1
n
n
∑
i=1
||v
nn
− v
i
|| (1)
Where P
sd
is the surface density of point cloud P,
n is the number of voxels in P, and v is a voxel in P,
while v
nn
is the nearest neighbour to v
i
measured as
euclidian distance expressed in voxels.
Surface density of a dataset is computed by taking
the mean surface density of all point cloud sequences
in a dataset, see equation (2).
D
sd
=
1
k
k
∑
i=1
S
i
(2)
Where D
sd
is the surface density of a dataset, and S
i
is the mean surface density of a point cloud sequence,
with k being the number of point cloud sequences in
a dataset.
The surface density of the datasets used in this pa-
per can be seen in Figure 1.
2.4 Evaluation Dataset
The compression codecs were evaluated on the
datasets listed along with their properties in Table 1.
A total of 5 different datasets were selected in order
to have a broad range of dataset properties. The MIA-
Heritage dataset has been created for the purpose of
this paper and consist of 3 high quality scans from
the Minneapolis Institute of Art
2
. The dataset was
made to represent dense static objects. Additionally,
a downsampled version of MIA-Heritage is included,
where the voxelized point cloud is downsampled uni-
formly by only keeping every 50’th value in the voxel
2
https://github.com/HuchieWuchie/mia-heritage
Figure 1: Box plots of the computed surface densities.
Notice the small surface density in the dense datasets,
i8vfbv2, mia-heritage-high and robot@home, compared to
the sparse datasets mia-heritage-low and washington.
grid. The value of 50 was chosen by iteratively down-
sampling the point clouds more to obtain a differ-
ence in the surface density as seen in Figure 1. The
density of the downsampled dataset is considered as
sparse. This was done to compare the performance of
the compression codecs on dense and sparse datasets
where the only difference is the surface density, this
dataset is referred to as MIA-Heritage-Low. Thus, the
addition of the two MIA-heritage datasets creates a
more diverse set of point cloud properties for evalua-
tion.
The compression codecs require all datasets to be
voxelized. All datasets were voxelized to a bit depth
of 10.
Frame examples of point cloud sequences from
each dataset can be seen in Table 2.
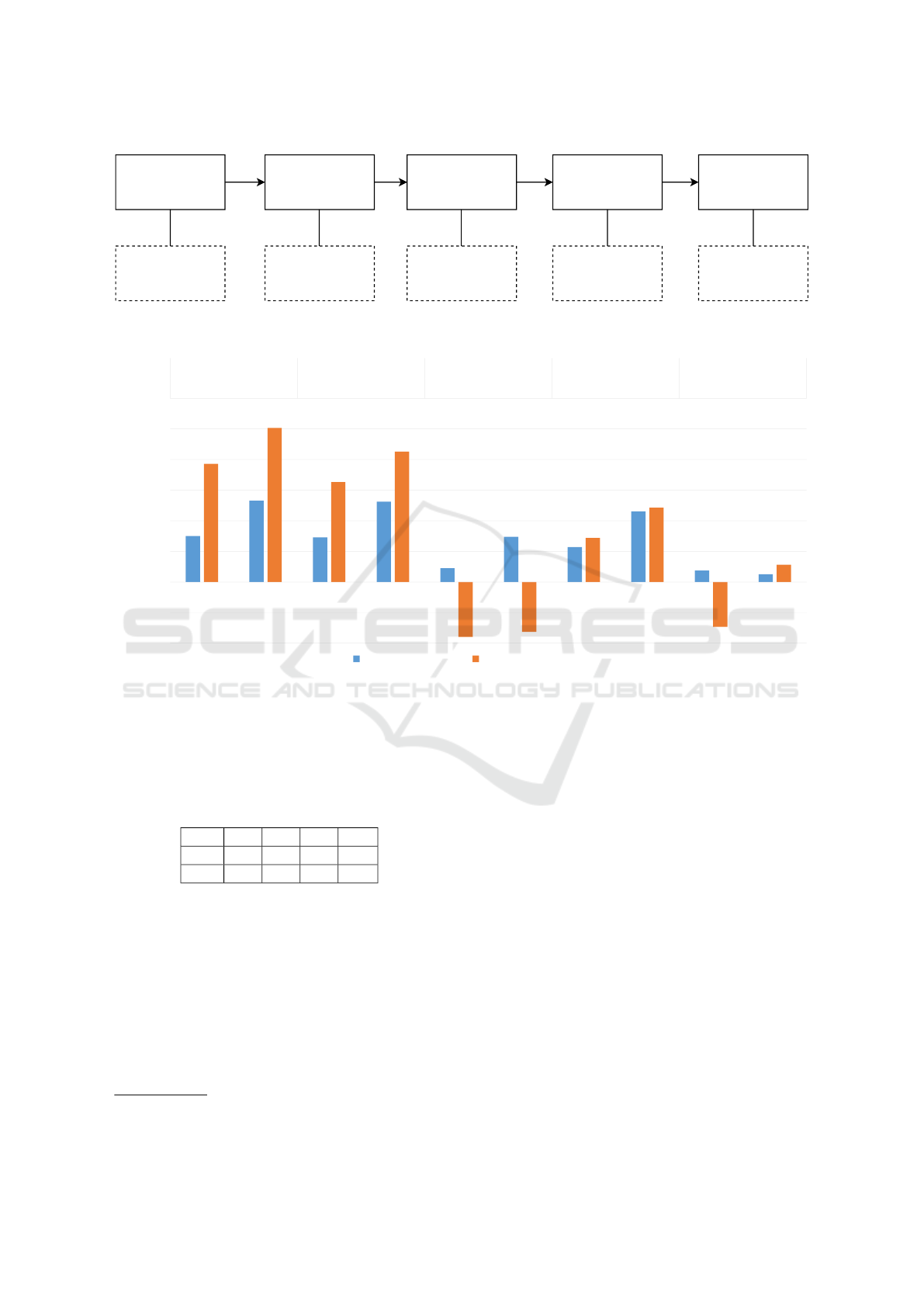
2.5 Evaluation Pipeline
The open source evaluation pipeline
3
, used for evalu-
ating the different codecs with various bitrate configu-
rations on the different datasets, can be seen in Figure
2.
The adopted metrics are calculated for all the in-
dividual point cloud sequences and averaged across
each dataset and compression codec.
It has been chosen to average the evaluation met-
rics across a whole dataset since it is not necessary
to evaluate the performance on each of the individual
point cloud sequences. This decision assumes, that
each of the datasets has similar point cloud proper-
ties.
3
https://github.com/math5581/PCCCP
Presenting a Novel Pipeline for Performance Comparison of V-PCC and G-PCC Point Cloud Compression Methods on Datasets with
Varying Properties
389
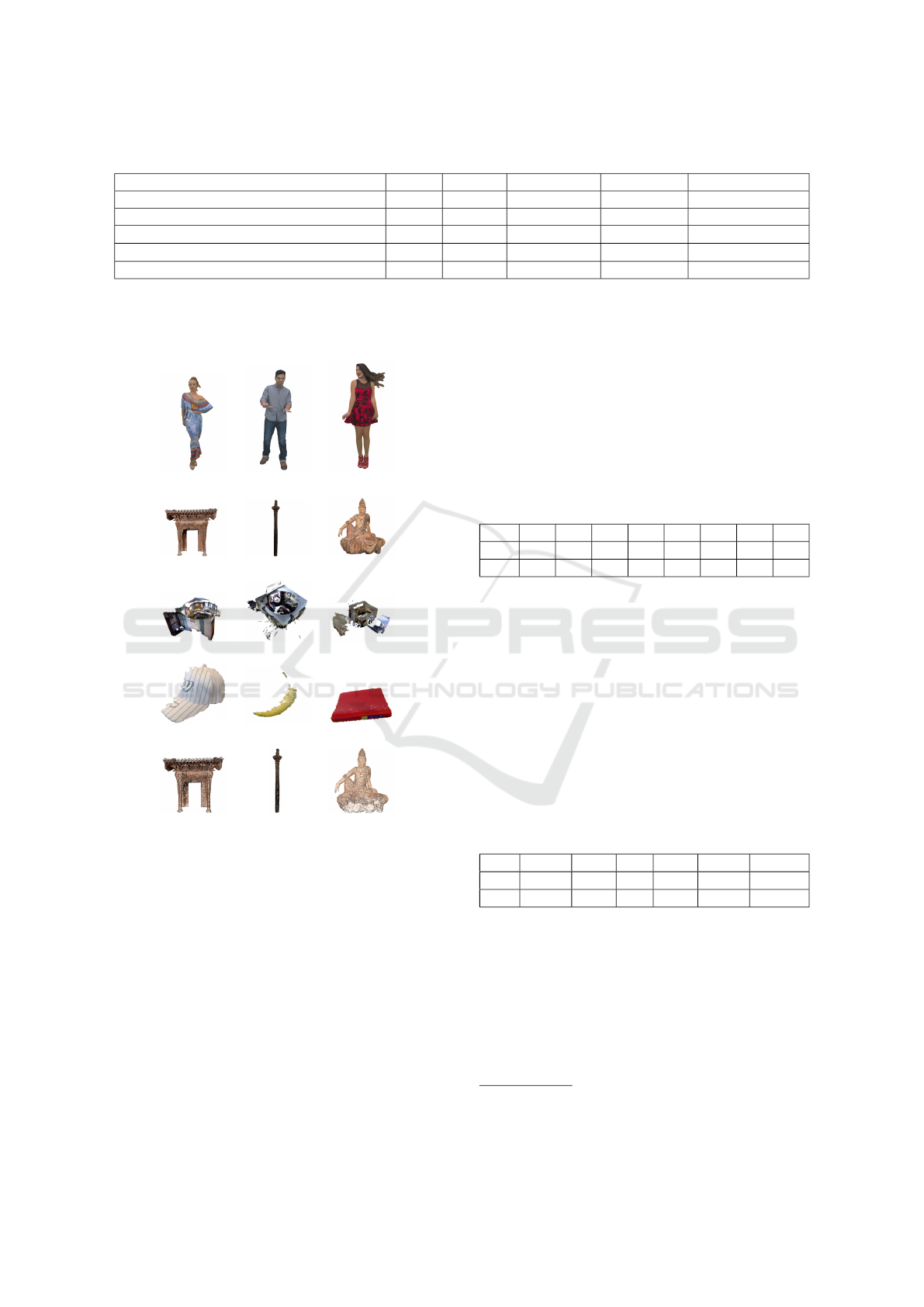
Table 1: Overview of the test datasets along with their properties. The MIA-Heritage-Low is downscaled by a value of 50.
Dataset Type Density Temporality View Information
8iVFB v2(d’Eon et al., 2017) Object Dense Dynamic Multi-view Geometry + RGB
Robot@Home(Ruiz-Sarmiento et al., 2017) Scene Dense Static Multi-view Geometry + RGB
MIA-Heritage
2
Object Dense Static Multi-view Geometry + RGB
MIA-Heritage-Low
2
Object Sparse Static Multi-view Geometry + RGB
Washington (Lai et al., 2011) Object Sparse Dynamic Single-view Geometry + RGB
Table 2: (a)-(c) 8iVFB-v2, (d)-(f) MIA-Heritage (dense),
(g)-(i) Robot@Home, (j)-(l) Robot@Washington RGB-D,
(m)-(o) MIA-Heritage downsampled by factor 50.
(a) (b) (c)
(d) (e) (f)
(g) (h) (i)
(j) (k) (l)
(m) (n) (o)
3 RESULTS
In order to evaluate the performance of several codecs
against each other using the BD metrics, an anchor is
used. The anchor serves as a baseline for comparing
the various codecs. For this report, Google’s Draco
was chosen as the anchor to compare MPEG’s G-PCC
and V-PCC against each other. Each of the tested
codecs was made to compress a specific point cloud
type. G-PCC was developed for compression of static
point cloud objects and scenes. V-PCC was developed
for compression of dynamic point cloud sequences,
such as point cloud videos. Lastly, Draco was origi-
nally developed for mesh compression. Despite this,
the comparison is made across all datasets. This is
done to evaluate their performance on the properties
defined in Section 2.2.
3.1 Draco Configurations
Draco
4
was evaluated with the configuration param-
eters given in Table 3.
Table 3: The Draco parameters that varied between the var-
ious bit rates. RX: various bitrate configurations. CL: com-
pression level, QL: quantization level.
R1 R2 R3 R4 R5 R6 R7 R8
CL 10 10 10 10 10 10 10 10
QL 6 7 8 9 10 11 12 13
3.2 G-PCC Configurations
G-PCC was evaluated with the octree transform for
geometry compression and the region adaptive Haahr
transform (RAHT) for attribute compression. Dy-
namic point clouds are compressed by compressing
the frames individually. G-PCC was evaluated with
the configuration parameters given in Table 4. The
rest of the parameters were left at default. The latest
reference implementation version 14.0 was used
5
.
Table 4: The G-PCC parameters that varied between the
various bit rates. RX: various bitrate configurations. PQ:
Position quantization, LQ: Luma Quantization.
R1 R2 R3 R4 R5 R6
PQ 0.125 0.25 0.5 0.75 0.875 0.9375
LQ 51 46 40 34 28 22
3.3 V-PCC Configurations
V-PCC was evaluated with the configuration param-
eters given in Table 5. Furthermore, the following
configuration files where used in the written order
common/ctc-common.cfg and condition/ctc-all-
intra.cfg which can be found at the V-PCC reference
4
https://github.com/google/draco
5
https://github.com/MPEGGroup/mpeg-pcc-tmc13
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
390
Select Codec Select Dataset
Select Point
Cloud
Sequence
Select Point
Bitrate
Configuration
Calculate
Metrics
Draco
GPCC
VPCC
MIA-Heritage
8iVFB-v2
...
Sequence 1
Sequence 2
...
Rate 1
Rate 2
...
PSNR Geometry
PSNR Attributes
BPP
Figure 2: Illustration of the evaluation pipeline. The metrics are calculated for each combination of {Codec, Dataset/Point
Cloud Sequence and Bitrate}.
7.53
13.27
7.30
13.12
2.25
7.38
5.71
11.53
1.89
1.26
19.30
25.18
16.33
21.30
-8.95
-8.12
7.18
12.13
-7.32
2.82
-10.00
-5.00
0.00
5.00
10.00
15.00
20.00
25.00
30.00
Geometry Colour Geometry Colour Geometry Colour Geometry Colour Geometry Colour
8iVFB v2 MIA-Heritage MIA-Heritage-Low Robot@Home Washington
Gain [dB]
GPCC BD PSNR [dB] VPCC BD PSNR [dB]
Figure 3: The collected results across the different datasets, with performance difference expressed via the BD PSNR values.
The Draco codec was used as the anchor.
implementation github
6
. The latest reference imple-
mentation version 14.0 was used.
Table 5: The V-PCC parameters that varied between the
various bit rates. RX: various bitrate configurations. GQ:
Geometry Quantization, AQ: Attribute Quantization.
R1 R2 R3 R4
GQ 32 24 20 0
AQ 42 32 27 -12
4 DISCUSSION
It can be seen in Figure 3 that MPEG’s V-PCC out-
performs both Draco and MPEG’s G-PCC in terms
of reconstruction quality of the decompressed point
cloud for geometry and colour on the Robot@home,
8iVFB-v2 and MIA-Heritage datasets. Common to all
of these datasets is that they consist of dense point
clouds, where the distances between occupied vox-
6
https://github.com/MPEGGroup/mpeg-pcc-tmc2
els are low. V-PCC was designed for compressing
dense dynamic object point clouds by utilizing opti-
mized 2D video codecs to compress the colour infor-
mation, which harmonizes well with the obtained re-
sults. This also explains why the reported BD-PSNR
results for Robot@Home are lower compared to those
for 8iVFB-v2 and MIA-Heritage, as those are objects
and Robot@Home are scenes. However, V-PCC still
performs better than Draco and G-PCC in terms of
reconstruction quality on the Robot@Home dataset.
It can also be seen from Figure 3 that V-PCC com-
presses geometric information of sparse point clouds,
such as those found in the MIA-Heritage-Low and the
Washington datasets poorly, compared to G-PCC and
Draco. This is possibly because V-PCC makes use
of 2D projection methods that require a high resolu-
tion for the 2D projection planes, which is not true for
sparse point clouds.
The results on the Washington dataset suggests
that V-PCC is not only troubled by compressing
sparse point clouds but also by compressing the ge-
ometric information in single-view point clouds. This
Presenting a Novel Pipeline for Performance Comparison of V-PCC and G-PCC Point Cloud Compression Methods on Datasets with
Varying Properties
391

might be because the V-PCC codec utilizes at least 6
projection planes which are redundant for single-view
point clouds. The normal vector segmentation in the
V-PCC algorithm should have been able to take care
of this issue, however, the results suggest otherwise.
G-PCC achieves higher BD PSNR gains for geometry
which suggest that G-PCC is better suited for com-
pressing single-view point clouds.
As seen in Figure 3, MPEG’s G-PCC outperforms
both Draco and V-PCC on both MIA-Heritage-Low
and Washington in terms of both geometry and colour
reconstruction quality. For the Washington dataset
Draco performs also most identical to the G-PCC and
has a higher BD PSNR gain than V-PCC for geometry
reconstruction quality. Both the MIA-Heritage-Low
and the Washington datasets consist of sparse point
clouds where the distances between occupied voxels
are large, see Figure 1. For G-PCC the octree data
structure was chosen since it was made to compress
sparse point clouds well which seems to be confirmed
by the results obtained in this paper.
It is worth noting that while G-PCC outperforms
Draco on the MIA-Heritage-Low and the Washington
datasets, it does so by a margin that is smaller than
those obtained on 8iVFB-v2 and MIA-Heritage. This
might suggest that Draco is also suitable for compres-
sion of sparse point clouds. Both Draco and G-PCC
outperform V-PCC heavily when compressing geo-
metric information in sparse point clouds. Further-
more, Figure 3 shows that G-PCC performs well on a
wide variety of datasets and does so consistently, e.g.
G-PCC performs almost similar on dense object and
dense scene datasets.
5 CONCLUSION
This paper proposes a set of binary properties to de-
scribe point clouds and argues that point cloud com-
pression methods should be evaluated on a diverse set
of datasets with different properties. To this end, an
evaluation framework with an associated open source
evaluation pipeline has been proposed with publicly
available datasets.
Furthermore we also propose the MIA-Heritage
dataset as a static dense point cloud compression
dataset benchmark, as well as a metric for surface
density to evaluate whether a point cloud is sparse or
dense.
The evaluation of 3D compression methods finds
that V-PCC provides good reconstruction quality on
dense static and dense dynamic point clouds. It per-
forms the strongest on objects but also outperforms
Draco and G-PCC on dense scenes in terms of recon-
struction quality. V-PCC is outperformed by G-PCC
and Draco on sparse datasets, with Draco and G-PCC
performing somewhat equally. Furthermore, the re-
sults suggest that V-PCC is challenged on single-view
datasets in terms of geometric reconstruction quality.
REFERENCES
Bello, S. A., Yu, S., and Wang, C. (2020). Review: deep
learning on 3d point clouds. CoRR, abs/2001.06280.
Bjøntegaard, G. (2001). Calculation of average psnr differ-
ences between rd-curves.
Bruder, G., Steinicke, F., and N
¨
uchter, A. (2014). Poster:
Immersive point cloud virtual environments. In 2014
IEEE Symposium on 3D User Interfaces (3DUI),
pages 161–162.
Cao, C., Preda, M., and Zaharia, T. (2019). 3d point cloud
compression: A survey. In The 24th International
Conference on 3D Web Technology, pages 1–9.
Chen, L.-C., Hoang, D.-C., Lin, H.-I., and Nguyen, T.-H.
(2016). Innovative methodology for multi-view point
cloud registration in robotic 3d object scanning and
reconstruction. Applied Sciences, 6(5).
d’Eon, E., Harrison, B., Myers, T., and Chou,
P. A. (2017). 8i voxelized full bodies-a vox-
elized point cloud dataset. ISO/IEC JTC1/SC29
Joint WG11/WG1 (MPEG/JPEG) input document
WG11M40059/WG1M74006, 7:8.
Fan, Y., Huang, Y., and Peng, J. (2013). Point cloud com-
pression based on hierarchical point clustering. In
2013 Asia-Pacific Signal and Information Processing
Association Annual Summit and Conference, pages 1–
7.
Graziosi, D., Nakagami, O., Kuma, S., Zaghetto, A.,
Suzuki, T., and Tabatabai, A. (2020). An overview of
ongoing point cloud compression standardization ac-
tivities: video-based (v-pcc) and geometry-based (g-
pcc). APSIPA Transactions on Signal and Information
Processing, 9:e13.
Gu, S., Hou, J., Zeng, H., Yuan, H., and Ma, K.-K. (2019).
3d point cloud attribute compression using geometry-
guided sparse representation. IEEE Transactions on
Image Processing, 29:796–808.
Huang, Y., Peng, J., Kuo, C.-C. J., and Gopi, M. (2008).
A generic scheme for progressive point cloud cod-
ing. IEEE Transactions on Visualization and Com-
puter Graphics, 14(2):440–453.
Ingale, A. K. and J., D. U. (2021). Real-time 3d reconstruc-
tion techniques applied in dynamic scenes: A sys-
tematic literature review. Computer Science Review,
39:100338.
JPEG (2020). Final call for evidence on jpeg pleno point
cloud coding. ISO/IEC JTC 1/SC 29/WG 1 (ITU-T
SG16).
Kim, J., Im, J., Rhyu, S., and Kim, K. (2020). 3d motion
estimation and compensation method for video-based
point cloud compression. IEEE Access, 8:83538–
83547.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
392

Krivokuca, M., Chou, P. A., and Savill, P. (2018). 8i vox-
elized surface light field (8ivslf) dataset. ISO/IEC
JTC1/SC29/WG11 MPEG, input document m42914.
Lai, K., Bo, L., Ren, X., and Fox, D. (2011). A large-
scale hierarchical multi-view rgb-d object dataset. In
2011 IEEE international conference on robotics and
automation, pages 1817–1824. IEEE.
Li, L., Li, Z., Zakharchenko, V., Chen, J., and Li, H. (2020).
Advanced 3d motion prediction for video-based dy-
namic point cloud compression. IEEE Transactions
on Image Processing, 29:289–302.
Li, Y., Ma, L., Zhong, Z., Liu, F., Chapman, M. A., Cao,
D., and Li, J. (2021). Deep learning for lidar point
clouds in autonomous driving: A review. IEEE Trans-
actions on Neural Networks and Learning Systems,
32(8):3412–3432.
Liu, H., Yuan, H., Liu, Q., Hou, J., and Liu, J. (2020).
A comprehensive study and comparison of core tech-
nologies for mpeg 3-d point cloud compression. IEEE
Transactions on Broadcasting, 66(3):701–717.
Mammou, K., Chou, P. A., Flynn, D., Krivoku
´
ca, M., Nak-
agami, O., and Sugio, T. (2019). G-pcc codec descrip-
tion v2. ISO/IEC JTC1/SC29/WG11 N18189.
Mekuria, R., Blom, K., and Cesar, P. (2017a). Design, im-
plementation, and evaluation of a point cloud codec
for tele-immersive video. IEEE Transactions on Cir-
cuits and Systems for Video Technology, 27(4):828–
842.
Mekuria, R., Laserre, S., and Tulvan, C. (2017b). Perfor-
mance assessment of point cloud compression. In
2017 IEEE Visual Communications and Image Pro-
cessing (VCIP), pages 1–4.
MPEG (2017). Call for proposals for point cloud
compression v2. ISO/IEC JTC1/SC29/WG11
MPEG2017/N16763.
MPEG (2020). V-pcc codec description. ISO/IEC JTC 1/SC
29/WG 7.
Quach, M., Valenzise, G., and Dufaux, F. (2019). Learning
convolutional transforms for lossy point cloud geome-
try compression. 2019 IEEE International Conference
on Image Processing (ICIP).
Que, Z., Lu, G., and Xu, D. (2021). Voxelcontext-net: An
octree based framework for point cloud compression.
Ruiz-Sarmiento, J., Galindo, C., and Gonzalez-Jimenez, J.
(2017). Robot@home, a robotic dataset for seman-
tic mapping of home environments. The International
Journal of Robotics Research, 36(2):131–141.
Santos, C., Gonc¸alves, M., Corr
ˆ
ea, G., and Porto, M.
(2021). Block-based inter-frame prediction for dy-
namic point cloud compression. In 2021 IEEE In-
ternational Conference on Image Processing (ICIP),
pages 3388–3392. IEEE.
Schwarz, S., Preda, M., Baroncini, V., Budagavi, M.,
Cesar, P., Chou, P. A., Cohen, R. A., Krivoku
´
ca,
M., Lasserre, S., Li, Z., Llach, J., Mammou, K.,
Mekuria, R., Nakagami, O., Siahaan, E., Tabatabai,
A., Tourapis, A. M., and Zakharchenko, V. (2019).
Emerging mpeg standards for point cloud compres-
sion. IEEE Journal on Emerging and Selected Topics
in Circuits and Systems, 9(1):133–148.
Wang, J., Ding, D., Li, Z., and Ma, Z. (2021). Multiscale
point cloud geometry compression. In 2021 Data
Compression Conference (DCC), pages 73–82. IEEE.
Wu, C.-H., Hsu, C.-F., Kuo, T.-C., Griwodz, C., Riegler,
M., Morin, G., and Hsu, C.-H. (2020). Pcc arena: a
benchmark platform for point cloud compression al-
gorithms. Proceedings of the 12th ACM International
Workshop on Immersive Mixed and Virtual Environ-
ment Systems.
Xiong, J., Gao, H., Wang, M., Li, H., and Lin, W. (2021).
Occupancy map guided fast video-based dynamic
point cloud coding. IEEE Transactions on Circuits
and Systems for Video Technology.
Presenting a Novel Pipeline for Performance Comparison of V-PCC and G-PCC Point Cloud Compression Methods on Datasets with
Varying Properties
393
