
Optimization of Sensor Placement for Birds Acoustic Detection in
Complex Fields
Damien Goetschi
1
, Val
`
ere Martin
2
, Richard Baltensperger
1
, Marc Vonlanthen
1
,
Donatien Burin des Roziers
1
and Francesco Carrino
1,3 a
1
University of Applied Sciences and Arts Western Switzerland, CH-1700 Fribourg, Switzerland
2
Nos Oiseaux, CH-2300 La Chaux-de-Fonds, Switzerland
3
University of Applied Sciences and Arts Western Switzerland,CH-1950 Sion, Switzerland
Keywords:
Modeling of Sound Propagation, Sensor Placement Optimisation, Particle Swarm Optimization, Genetic
Algorithms, Bird Conservation.
Abstract:
Birds nest in multifunctional semi-natural environments. Intensification of agriculture and forestry prevents
their successful breeding, threatening globally their survival. Early bird detection allows for targeted conser-
vation actions, such as local (temporary) habitat protection. The conservationist thus looks for at detecting
priority bird species as soon as a territory is occupied, for instance using acoustic surveillance network. We
present a comprehensive method to optimize acoustic coverage with a minimum number of sensors in the
network. Our method includes a sound propagation model and algorithms for optimized sensor placement.
Relevant parameters (e.g., topography, soil type, height of vegetation, weather, etc.) for the sound propagation
model are automatically extracted from an area of interest. We implemented and compared Particle Swarm
Optimization and Genetic Algorithms-based approaches to solve the optimisation problem.
1 INTRODUCTION
Birds breeding in Switzerland occupy forest and
farming environments exploited as well for natural
resources. The intensive operations on such lands
strongly jeopardize their breeding success. Threat-
ened species are for instance the Corncrake (Crex
crex) or the Eurasian Pygmy-owl (Glaucidium passer-
inum). Early detection, accurate localization, detailed
behavioral information and proper policy applications
altogether allow to enforce permanent or temporary
habitat protection and disturbance avoidance for suc-
cessful nesting. This paper topic deals with early
detection using acoustic network made up of many
acoustic sensors in order to survey an area of interest.
Two main practical questions arise: how many and
where should the sensors be located ? Which portion
of the area is actually covered (coverage) ?
Given an area of interest, the problem of exhaus-
tive bird detection through acoustic sensors is partic-
ularly challenging since it requires to precisely model
sound propagation in complex and heterogeneous nat-
a
https://orcid.org/0000-0003-0152-2161
ural environments. Sound propagation depends on
factors such as weather, elevation, type of vegetation,
etc. Without the knowledge of the sensors’ real de-
tection range (as modified by the above-mentioned
factors), either birds are unknowingly missed or the
number of acoustic devices to completely cover the
area will be excessively high. The main objective of
this paper is to present a tool for the optimized config-
uration of large autonomous acoustic monitoring net-
works for bird detection.
We propose to model sound propagation ac-
cording to the ISO 9613-2 standard (ISO 9613-
2:1996(F), 1996) and to computationally search for
a near-optimal sensor location given a number of
available sensors. For this purpose, we imple-
mented particle swarm optimization (PSO) algorithm
(Bonyadi and Michalewicz, 2017) and genetic algo-
rithms (GAs) (Whitley, 1994) (detailed information
about our methodology is provided in Section 3).
To validate our approach, we developed a tool
that, given the geographical coordinates of an area
of interest, the number of available sensors and their
specifications (such as the detection range), automat-
ically collects all the relevant field information and
550
Goetschi, D., Martin, V., Baltensperger, R., Vonlanthen, M., Roziers, D. and Carrino, F.
Optimization of Sensor Placement for Birds Acoustic Detection in Complex Fields.
DOI: 10.5220/0010819000003122
In Proceedings of the 11th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2022), pages 550-559
ISBN: 978-989-758-549-4; ISSN: 2184-4313
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

computes a near-optimal solution for the network
configuration. For practical use, the tool allows as
well manual adaptation of the proposed solution to
consider possible unforeseen practical field problems
(e.g., a sensor’s computed location is inaccessible or
on a private land).
This paper is structured as follow: Section 2
presents the state of the art concerning the mod-
eling of sound propagation, the theories supporting
near-optimal sensor placement, and computational
methods to solve such a problem; Section 3 details
the sound propagation model we adopted (i.e., ISO
9613-2), the sensor placement algorithm, the archi-
tecture of our system and how we adapted PSO and
GAs approaches for our coverage problem; Section
4 presents and discusses the results. Finally, in Sec-
tion 5, we present the limitations and outlooks of our
work.
2 STATE OF THE ART
To the best of our knowledge, no systematic and rig-
orous method for deploying acoustic monitoring net-
works for ornithology has been yet developed. Such
a method implies two main tasks: 1) describing how
the sound travel in a heterogeneous landscape and 2)
how to use this information to place the sensors in
the field in order to minimize the probability of unde-
tected sound.
In this section, we briefly present recent works
on sound propagation models, probabilistic theory of
sensor placement and acoustic coverage optimisation
methods.
2.1 Sound Propagation
Modeling the propagation of sound is a complex prob-
lem that depends on many parameters such as the fre-
quency and sound pressure at the source, the meteo-
rological conditions, the nature of the ground and the
obstacles encountered by the sound or the relief. Tak-
ing into account all these parameters implies in return
to account for physical phenomena such as reflection
and diffraction of sound waves, wind speed profiles
and turbulence, geometric dispersion or absorption of
sound energy by atmospheric molecules.
Analytical and numerical approaches have been
developed and applied in order to tackle the prob-
lem of sound propagation. Selection of one approach
mainly depends on the complexity of the particular
situation as well as on the computer resources avail-
able.
Analytical methods are often based on geometri-
cal acoustics and are therefore relevant for simple sit-
uations involving an homogeneous and isotropic at-
mosphere, an homogeneous ground and a zero or con-
stant vertical gradient of sound speed (Attenborough
et al., 1980; de Hoop et al., 2005). Geometrical acous-
tics relies on the ray tracing theory that assumes sound
to be a large number of very narrow beams propagat-
ing in a straight light unless it encounters an obstacle
or a change in the medium of propagation. Propaga-
tion above a mixed ground is more complex and has
also been studied using Green formulation (Chandler-
Wilde and Hothersall, 1985).
In the last few years, propagation of sound in com-
plex fields including heterogeneous grounds and me-
teorological events has been widely studied. The de-
veloped numerical methods have also been compared
with the analytical approaches and with field mea-
surements.
The Fast Field Program (FFP) is a computational
technique involving the Hankel transformation of the
Helmholtz equation in circular cylindrical coordinates
and the integration of the resulting ordinary differen-
tial equation by analogy with electrical transmission
lines (Raspet et al., 1985).
Boundary Elements Methods (BEM) approxi-
mates the solutions of partial differential equation im-
plied in the sound propagation by looking at their so-
lutions at the boundaries of the discretized elements
of the space. The accuracy of these methods has been
well validated against other numerical models (Lam
and Monazzam, 2006).
The Transmission Line Matrix method (TLM)
(Guillaume et al., 2014) or the Meteo-BEM (Premat
and Gabillet, 2000) provide other examples of numer-
ical methods that have been applied to sound propa-
gation.
Nevertheless, these numerical approaches are time
and computer resources consuming. Moreover, their
implementation becomes very fastidious when con-
sidering complex environments, mixed influence of
terrain topography and time-dependent atmospheric
conditions. An alternative is to consider in an incre-
mental way the different contributions (geometrical
dispersion, atmospheric absorption, ground effects,
etc.) to sound attenuation and to subtract them form
the sound pressure at the source. This is the method
supported by the International Organisation for Stan-
dardization (ISO) which is commonly used in engi-
neering (ISO 9613-2:1996(F), 1996).
Optimization of Sensor Placement for Birds Acoustic Detection in Complex Fields
551

2.2 Theory of Sensor Placement
A key question in the field of acoustic network de-
tection is where one should place the sensors in order
to maximize the chance of detecting the event of in-
terest, in our case a bird song. There are different
approaches to tackle this question.
One possible approach is to assume that sensors
have a fixed sensing radius and to solve the task as an
instance of the art-gallery problem (Gonz
´
alez-Banos,
2001). The problem with this approach is that the ge-
ometrical assumption is too strong and cannot suc-
cessfully be applied in very complex field where the
sensing range is not constant and depends on local en-
vironmental conditions. An alternative approach from
spatial statistics (Caselton and Zidek, 1984) assumes
weaker geometrical assumptions. It relies on a pilot
deployment or expert knowledge to train a gaussian
process model that allows for localization predictions
made over the sensed field. The model can then be
used to predict the effect of placing sensors at partic-
ular locations, and thus optimize their positions. For
a given gaussian process model, different criteria can
be proposed to find the optimal sensor placement. A
criteria that is often used is entropy: highest entropy
corresponds to regions where the sensors are most un-
certain about each other’s measurements. The typical
sensor placement technique is to greedily add sensors
where the entropy is maximal (Cressie and Moores,
2021). However, in our case, the entropy criteria does
not seem to be relevant since the set of sensors is
then characterized by sensor locations that are as far
as possible from each others. This results in sensors
distributed at the border of the region of interest (Ra-
makrishnan et al., 2005).
In (Krause et al., 2008), the authors present a
greedy-heuristic method based on maximizing the
mutual information between the chosen location and
those which are not selected yet. This approach has
then successfully been applied for determining near-
optimal placement of acoustic devices for monitor-
ing wildlife resources and for localization of sound
sources (Pi
˜
na-Covarrubias et al., 2019).
2.3 Particle Swarm Optimization and
Genetic Algorithms for
Mathematical Optimization in
Sensor Networks
Mathematical optimization consists in the selection
of the best element in the space of possible solutions
(Yang, 2008). The elements are ranked via an objec-
tive function (also called fitness function, loss func-
tion or cost function, depending on the context and
goals). The space of possible solution is typically lim-
ited by some constraints. Many methods exist to find
optimal or pseudo-optimal solutions. In this work, we
use and compare two approaches: particle swarm op-
timization (PSO) and genetic algorithms (GAs).
PSO (Kennedy and Eberhart, 1995) is a compu-
tational method used in many domains (Bonyadi and
Michalewicz, 2017) that aims to solve iteratively an
optimization problem by “moving” a population of
possible solutions, called “particles”, in the space of
possible solutions. Simple mathematical formulas
manage each particle’s position and velocity. Each
particle is “attracted” in a direction that depends on
the position of its personal (or local) best and the
position of the current global best discovered by the
swarm (any particle). This is expected to move the
swarm towards the best solutions. A good combina-
tion of hyper-parameters such as number of iterations,
number of particles, inertia weight, acceleration coef-
ficients, etc. is very important to cover the full space
of possible solutions and to converge while avoiding
local optima.
GAs (Whitley, 1994) is a family of computational
methods that aim to solve iteratively an optimization
problem by following a process inspired by Charles
Darwin’s theory of natural selection. The main idea
is to select from the population (i.e., a large group
of possible solutions) the best individuals and mixing
their “chromosomes” (i.e., their features) in a smart
way to generate an improved second generation. Gen-
eration by generation, the algorithm should converge
to the global optimum. A good combination of hyper-
parameters such as number of generations, the popu-
lation size, methods used for the selection, modifica-
tion and transmission of the chromosomes (crossover,
recombination and mutation) may help the algorithm
to converge while avoiding local optima.
In an abstract way, it is possible to see PSO as
a particular case of GAs, in which the swarm size
corresponds to the population size and the logic used
to compute the particles displacement corresponds to
particular crossover and mutation strategies.
Since more than 20 years, PSO and GAs have
been proposed to solve node placement problems in
Wireless Sensor Networks (WSN). In (Younis and
Akkaya, 2008) (2008), Younis and Akkaya presented
a survey about strategies and techniques for node
placement in WSN. Their survey is very broad, cov-
ering the problem of maximal coverage of the moni-
tored area (with the lower number of sensors). How-
ever, they clearly present how the choice of the de-
ployment scheme depends on the application, the ty-
pology of sensors, and the environment. They sug-
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
552

gest to prefer deterministic approaches when sen-
sors are expensive or when their performances are di-
rectly impacted by their position as in our case. Con-
cerning PSO, (Kulkarni and Venayagamoorthy, 2010)
presents a survey about the use of PSO for the place-
ment of stationary and mobile nodes, along with other
PSO based solutions for WSN problems such as data
aggregation, node localization and energy-aware clus-
tering. They showed that PSO is a suitable approach
to solve optimization problems in WSNs due to “its
simplicity, high quality of solution, fast convergence,
and insignificant computational burden”. However,
they also raise awareness about its limitations for
high-speed real-time applications given the iterative
nature of PSO.
GAs have been successfully applied in many con-
texts (machine learning, scheduling, placement) and
domains (engineering, biology, and medicine) (Ay-
bars, 2008). In 2020, ZainEldin et al. (ZainEldin
et al., 2020) presented a comparison between different
state-of-the-art GA-based techniques used for place-
ment of WSN. In their analysis, they classified algo-
rithms according to three aspects: coverage, connec-
tivity and minimum number of nodes. Most of the
approaches proposed successfully achieved full cov-
erage while minimizing cost (e.g., the number of de-
ployed sensors). However, they did not all consider
all the three aspects and most of them developed fit-
ness functions and crossover approaches specific for
their problem. In our work, we focus on the cover-
age problem while taking into account outdoor envi-
ronment factors such as elevation, vegetation height
and density, average weather conditions, etc. In this
same direction, (Pal et al., 2021) recently faced sim-
ilar challenges for the deployment of sensor nodes
communicating under IEEE 802.15.4 wireless stan-
dard. They successfully build a reliable WSN for crop
monitoring, but their focus was more to keep connec-
tivity between sensors than on coverage aspects.
3 METHODOLOGY
3.1 Sound Propagation Model
Concerning the sound propagation model and for the
sensor placement algorithm (see Section 3.2), we
adopt the methodology from (Pi
˜
na-Covarrubias et al.,
2019). Since these different elements of the model
are separately implemented in our algorithm, they can
easily be changed or improved in further develop-
ments.
We use fundamental equations according to ISO
9613-2 (ISO 9613-2:1996(F), 1996). We need to cal-
culate the sound pressure L
P
in decibels at the position
of the sensor as a function of the sound pressure L
W
at the emitter, possible corrections D due to the direc-
tivity of the source and some attenuation factors A
i
of
the sound between the source and the sensor:
L
P
= L
W
+ D −
∑
i
A
i
(1)
Since we consider the sound sources as emitting
with no preferred direction, D = 0 dB. The attenua-
tion factors A
i
may depend on the frequency of the
sound. The first of these factors A
1
comes from the
geometrical spreading of the sound into space. It de-
pends on the distance d between the source and the
sensor and of some reference distance d
0
set to 1 m:
A
1
= 20 log
d
d
0
+ 11 (2)
The second factor A
2
is a consequence of atmo-
spheric attenuation which converts sound energy into
heat. It depends strongly on the distance d, the sound
frequency and some meteorological parameters like
humidity and air temperature. Therefore
A
2
= αd (3)
where α is a coefficient that takes into account these
dependencies. The third factor A
3
is the ground effect
because of the reflections of the sound on the ground.
It can be written as
A
3
= A
s
+ A
r
+ A
m
(4)
where A
s
, A
r
and A
m
are specific contributions to
the ground attenuation at the source, at the receiver
and in an intermediate position, respectively.
The fourth one, A
4
, is the attenuation occurring
in the presence of vegetation. In accordance with the
ISO 9613-2 standard, it depends strongly on the fre-
quency and on the distance d
f
travelled by the sound
in the vegetation. Attenuation from vegetation con-
tributes in a limited way to the overall attenuation.
Typical values are of the order 1-2 dB. Some cor-
rections C
weather
from the meteorological conditions
are also taken into account. But as it is emphasized
in (ISO9613 − 2 : 1996(F), 1996), experience shows
that those corrections are, in practice, limited to the
range from 0 to about 5 dB and values above 2 dB are
exceptional.
Figure 1 shows the effects of each attenuation on
a given sound as the distance increases. A
1
due to
geometrical spreading of sound is by far the most im-
portant contribution to the sound attenuation.
Optimization of Sensor Placement for Birds Acoustic Detection in Complex Fields
553
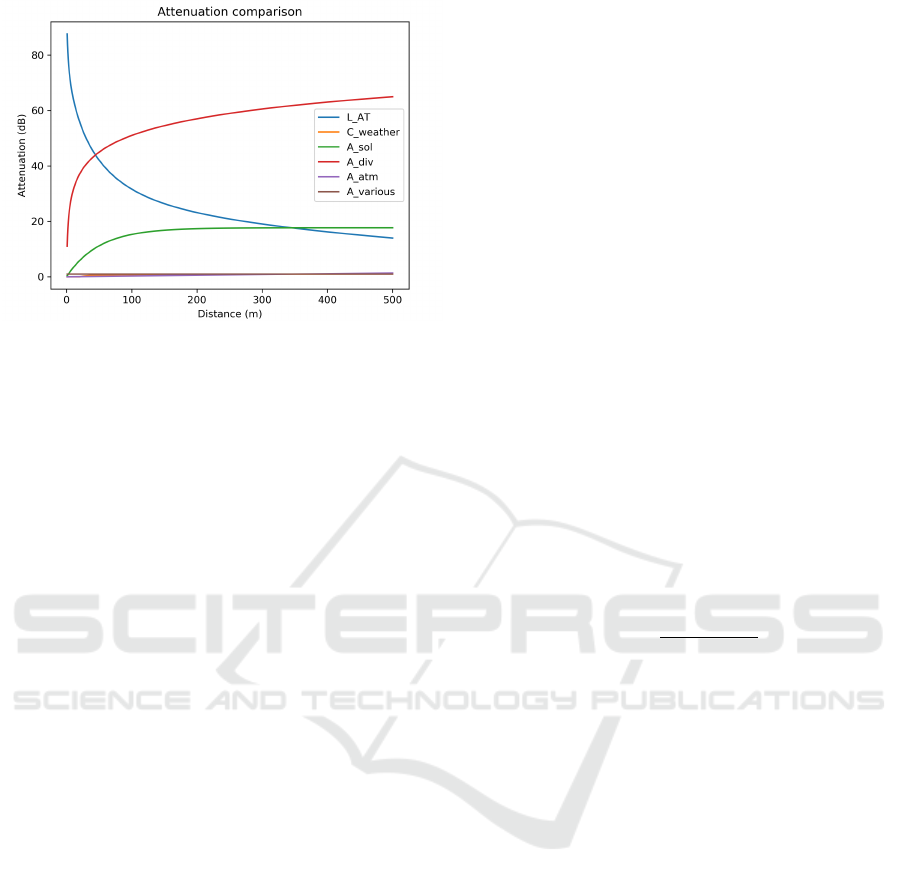
Figure 1: Comparison of the different attenuation contri-
butions to sound intensity. Here, L
AT
is the overall sound
attenuation (L
P
in equation (1)), A
sol
= A
S
is the ground at-
tenuation, A
div
= A
1
the geometrical spreading, A
atm
= A
2
the atmospheric absorption and A
various
the other less sig-
nificant attenuation factors.
3.2 Sensor Placement Algorithm
We present here the main results of the sensor place-
ment algorithm developed in (Pi
˜
na-Covarrubias et al.,
2019) and that we adapted in our system. A given
region is considered with a set G of possible sound
sources and a set D of possible sensor placements.
The goal of this approach is to minimize the proba-
bility of not detecting a sound emitted somewhere in
G. The probability of detecting a sound that occurs at
any location i ∈ G when a single sensor is deployed
at location j ∈ D is given by
P
j
D
=
∑
i∈G
P
j
G
P
i, j
D
(5)
where P
i, j
D
is a function depending on the sound
pressure level detected at j ∈ D of a sound emitted
at i ∈ G. The sound pressure is computed with the
method described in Section 3.1. If n devices are de-
ployed on a set of possible locations N , the probabil-
ity of at least one sensor detecting a sound occuring
at any location in G is
P
N
D
= 1 −
∑
i∈G
P
i
G
∏
j∈N
1 − P
i, j
D
. (6)
Equation (6) assumes independent sound detec-
tion by each sensor.
The algorithm then proceeds by iterative greedy
placement of the n sensors in order to maximize the
probability P
N
D
in Equation (6). In case n = 1, the
problem is easily solved by choosing the single loca-
tion in D that maximizes the probability, but for n ≥ 1
the problem is more complex. It becomes then combi-
natorial in the sense that the algorithm has to evaluate
the probability for n locations over all the set of pos-
sible locations in D. The iteration allocates the first
of the n sensors for which the probability of not miss-
ing a sound is the highest (or, in other terms, it places
the sensor that minimizes the probability of missing
a rare sound). Then, at each iteration, it finds the op-
timal location for the next sensor given the position
of the previously placed ones. The result from this
greedy approach has been proved to be close to the
optimal placement (Krause et al., 2008).
Once the optimal sensor placement has been de-
termined, the next step consists in the sound localiza-
tion. Considering a subset of the deployed sensor at
locations N
D
∈ N . If one or more of these sensors de-
tect the sound, while the others at locations N \ N
D
fail to detect the sound, the likelihood that these ob-
servations were caused by a sound emitted at location
i ∈ G is
L
D
i
=
∏
j∈N
D
P
i, j
D
×
∏
j∈N \N
D
1 − P
i, j
D
(7)
Given that and using Bayes’ theorem, the poste-
rior probability P
0
i
G
that the sound was emitted at lo-
cation i is
P
0
i
G
=
P
i
G
L
D
i
∑
i∈G
P
i
G
L
D
i
(8)
If more that one sensors detects the sounds and
the time of each detection is available, then it is pos-
sible to extend the analysis and to refine the model
proposed using Equation (8). However, this has not
been implemented yet in our algorithm and the de-
tails of the enlarged procedure are explained in (Pi
˜
na-
Covarrubias et al., 2019).
3.3 System Description
In order to find the best sensors locations, a user has to
provide to the system information such as the region
of interest, the sensors’ specifications and the charac-
teristics of the targeted species: where the bird sings
(on the ground, while flying, in the bushes, etc.), the
sound frequency (Hz) and the average sound pressure
level at the source (dB).
As explained in Section 3.1, the sound propaga-
tion model requires information about the topography,
vegetation height/type (fields, forest, bushes, etc.) and
the meteorological conditions on site. This informa-
tion is used to define the probability matrix for all pos-
sible sound sources G (see Section 3.4). Once defined
the perimeter of the region of interest (in terms of
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
554

latitude-longitude coordinates), the system automati-
cally gathers all the information required for the com-
putation.
The first source of information is Swisstopo (Fed-
eral Office of Topography, 2021). Available data on
topography and vegetation have a resolution of half
a meter. The second source is IDAweb from Me-
teoSwiss (Swiss Federal Office of Meteorology and
Climatology) providing data collected by ground sta-
tions. Concerning the weather data, since the sen-
sors have to remain on site for long time intervals,
we use monthly-averaged temperature, humidity and
pressure.
Given this information, our tool provides the esti-
mated best location in which to place the sensors and
the expected coverage. Finally, even if our tool is not
yet intended for the use of general public, we devel-
oped a minimal user interface that allows manually
changing the position of each sensors, recomputing
“on-the-fly” the expected coverage. This allows con-
sidering possible difficulties encountered in the field
such as unreachable areas, unexpected noisy environ-
ments, etc.
3.4 Optimisation Algorithms: Concept
and Implementation
The main idea of our work is to combine the al-
gorithm proposed in Section 3.2 (Pi
˜
na-Covarrubias
et al., 2019) with the computational mathematical op-
timization methods presented in Section 2.3 while us-
ing the ISO 9613-2 sound propagation model (Section
3.1).
In the first step, the information contained in the
map (elevation, vegetation height, weather, etc.) are
combined with information coming from the bird pro-
file. This operation provides a probability matrix that
covers all the area and it models the probability dis-
tribution of the presence of a given species of birds
(it corresponds to P
G
in Equations (5) and (6)). The
specifications of the sensors (e.g., sensibility, height
from ground, etc.) and the ISO 9613-2 sound propa-
gation model are then used to compute P
N
D
in Equa-
tion (6). As mentioned above, given a particular sen-
sor placement, P
N
D
represents the probability of miss-
ing a rare sound (in our case, a bird singing). This
function represents the core of the fitness function that
our algorithms will try to minimize.
As introduced above, in this work we used and
compared PSO and GAs.
Concerning PSO, we used the standard formu-
lation with constraints support as implemented in
the pyswarm library (tisimst, 2015). We determined
hyper-parameters such as swarm size, max iterations,
ω, φ
p
, and φ
g
in a validation set composed of test
maps close but not overlapping the regions of interest.
ω, φ
p
and φ
g
represent “exploration versus exploita-
tion” parameters. They indicate the velocity of each
particle and the weight given by each particle to the
particle’s best known-position (current personal best)
and the swarm best-known position (current global
best) in order to compute their position at the next
iteration. In our problem, each particle represents the
possible placement of a sensors in the map. When
the algorithm converges or after the maximum num-
ber of allowed iterations (indicated by the parame-
ter max iterations), we select the swarm’s best-known
position as the position in which to place the sensor.
With this approach, sensors can be placed one after
the other to reach the desired number of sensors or,
possibly, until the fitness function does not overcome
a given threshold. As a variant, we implemented a
“non-greedy” version of the same algorithm in which
we could place the n sensors at the same time. In the
greedy algorithm, once a sensor is placed, it cannot be
moved anymore, limiting the possibility to converge
to the actual global maximum that considers all the
sensors at once. In the second, non-greedy variant,
each particle represents the positioning of n sensors
at once. Our hypothesis is that it should not suffer
of the same limitation and converge to a better global
optimization. However, the problem that has to be
solved in each iteration becomes increasingly com-
plex (depending on the number of sensors to place at
once), therefore we expect to get better performance
but only after longer execution time.
Concerning the GAs, we needed an additional step
to formulate the problem in a way that could be solved
by an evolutionary approach. In particular, we needed
to define what represents an individual (or a chromo-
some) and, subsequently, the mathematical way to im-
plement crossover, recombination and mutation.
We considered an individual as a sensor posi-
tioned on the map. The individual’s chromosome rep-
resents its coordinates x, y. The population repre-
sents a set of individuals (i.e., a set of possible sen-
sor’s placement on the map). From the initial popu-
lation, we need to select the best elements that will
go through the crossover phase. To do this, we used
the approach known as “tournament selection”. This
method consists of randomly selecting a few individ-
uals and, among them, selecting those with a bet-
ter score in terms of the chosen fitness function (the
“winners” of the tournament). This process is re-
peated many times and the winners of each tourna-
ment are designated for crossover. During crossover,
two individuals are selected at a time and they will
generate two new individuals of the next generation.
Optimization of Sensor Placement for Birds Acoustic Detection in Complex Fields
555
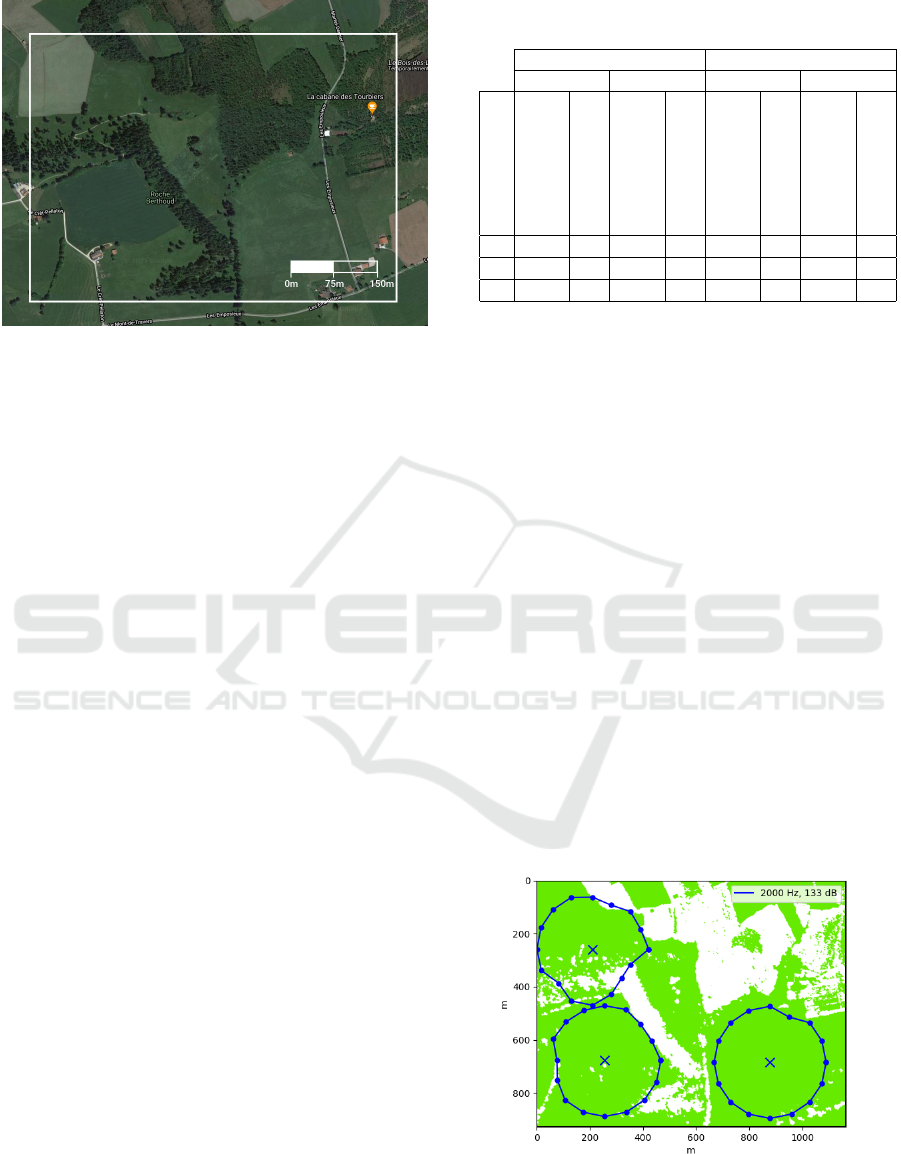
Figure 2: Region used for the test. As reference, the posi-
tion of orange point visible in the figure above is at coordi-
nates (46.972281 N, 6.704513 E).
The crossover function we implemented consists in a
weighted average among the chromosomes (i.e., the
coordinates) of the two parents, in which the weights
are random values between 0 and 1. In other terms,
this means that the offspring is placed in a random
position along a vector joining the two parents. Fi-
nally, the offspring has a given probability to present
mutations. Mutations are typically used to avoid local
maxima. In our case, a mutation consists in a ran-
dom offset along x and/or y that we added to the off-
spring. Once the mutation step is completed, we have
a new generation of individuals and the whole process
is repeated for a fixed number of generations. From
this perspective, it is easy to see the correspondence
between swarm size in PSO and population size in
GAs, number of iterations (PSO) and number of gen-
erations (GAs). We kept these parameters consistent
between the two approaches in order to get more com-
parable results.
4 RESULTS AND DISCUSSION
To test and compare PSO’s and GAs’ “greedy” and
“non-greedy” versions, we used an area of one square
kilometer (Figure 2). We tested with up to 20 sen-
sors to evaluate the evolution of performance in terms
of coverage and time when increasing the number of
sensors. As the algorithms use random initialization
and may converge to different local optima after each
execution, we repeated each test 10 times and we av-
eraged the scores.
Table 1 presents a comparison between greedy and
non-greedy approaches using our PSO and GAs se-
tups. The test was carried out on the region specified
on Figure 2. The scores in the table represent:
Table 1: Comparison of versions and algorithms. Here, the
coverage represents the probability to detect a sound.
Greedy Non-greedy
PSO Genetic PSO Genetic
Number of sensors
coverage
time (min)
coverage
time (min)
coverage
time (min)
coverage
time (min)
3 51% 33 50% 20 49% 45 46% 29
4 61% 39 59% 25 60% 58 53% 33
5 69% 45 68% 29 65% 70 64% 42
• The overall coverage. It represents the probability
to detect a sound. It is computed as the ratio be-
tween the surface covered by the sensors and the
total surface, while considering the probability of
a sound to be emitted in each given point.
• The execution time. As a reference, all computa-
tions were done on the same machine and with-
out other applications running: CPU: 3.60 GHz,
RAM: 32 GB, OS: Windows 10.
Figure 3 presents the optimal sensors placement
for three sensors found by greedy genetic algorithm
on the region of Figure 2. As expected, the constant
133 dB sound pressure level (blue line) is closer to a
circular geometry around the sensor in case of an ho-
mogeneous floor and topography (e.g., the third sen-
sor at the bottom right on Figure 3).
Moreover, in this precise case, the target bird
species is known not to live in forest environments.
Therefore, the forest area present in the region was
excluded of the simulation. As shown in Table 1, the
coverage for three sensors using the greedy genetic al-
gorithm is about 50% determined in a time of 20 min-
utes. The coverage with the greedy PSO algorithm
Figure 3: Optimal placement of three sensors. The differ-
ent background colors are related to the vegetation height.
The blue line represents the same sound pressure level. Non
circularity around the sensor is due to unequal sound prop-
agation over different floors.
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
556
is slightly better with 51%, but the time is then 33
minutes. Taken coverage and time consumption into
account lead to the conclusion of a better efficiency
for the greedy genetic approach.
It is also relevant to compare our results with a
random placement of the sensors in terms of cover-
age. Results can be seen on Figure 4. Random sensor
placement was ran 1000 times and gave a coverage
mean value of 26% and a best value of 48% occur-
ring only once. The coverage obtained by our tests
presented in Table 1 are all above the random cover-
age distribution. This result gives an indication on the
validity of our different approaches.
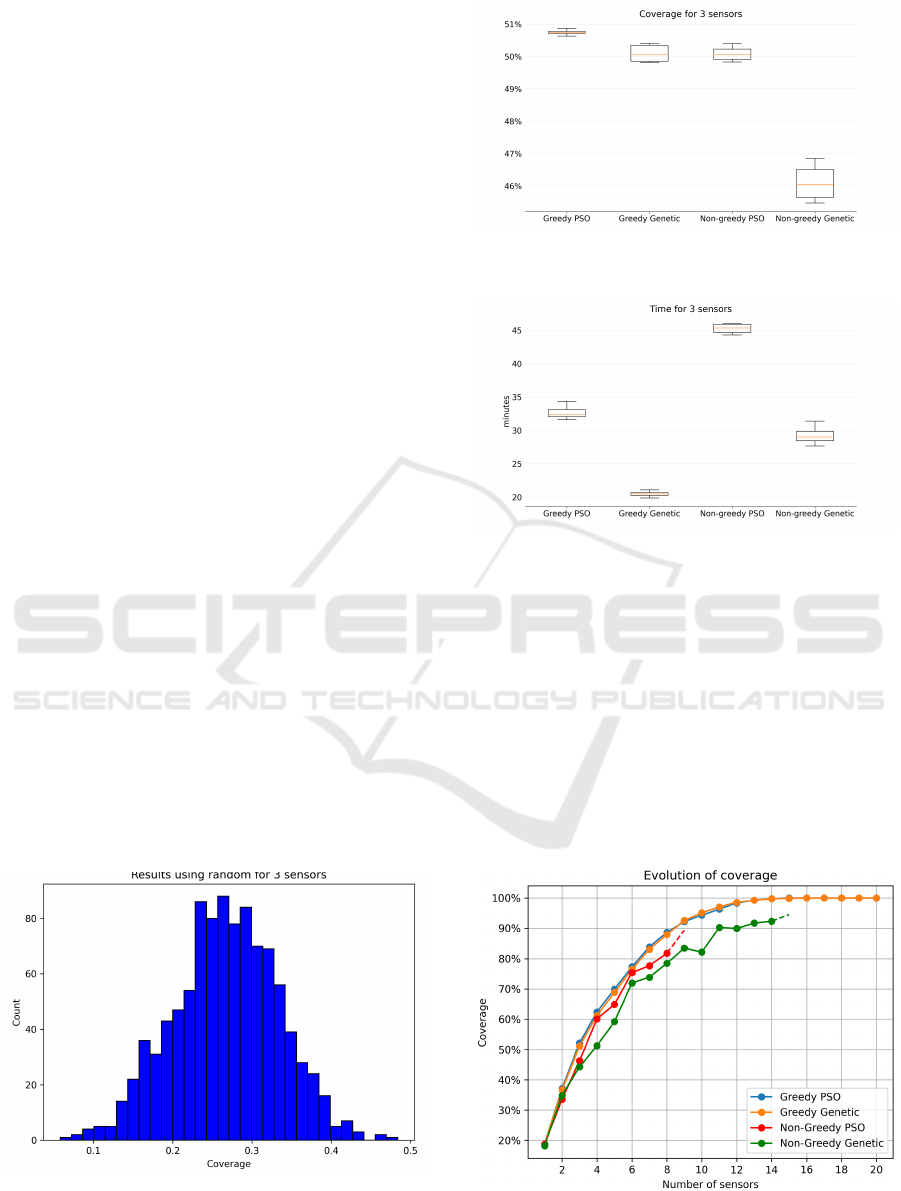
As we see from Figures 5 and 6, in general, the
non-greedy methods that we proposed take more time
and give poorer results compared to greedy methods.
In the region of interest, with three sensors deployed,
PSO and GAs with greedy method provide a mean
coverage above 50%. GAs seems to have an cover-
age of 1 or 2% below but they take 40% less time.
Therefore, the choice of the most suitable algorithm
depends on the time available and how good the re-
sult has to be. It is also worth mentioning the nar-
rower coverage distribution of the greedy PSO al-
gorithm in comparison with the others ones. This
means that through the different runs, the PSO algo-
rithm tended to converge to the same, good solution
with low variance. However, the difference with the
other approaches remains small, of the order of a few
percent. As already emphasized, all approaches are
largely better than random placement (Figure 4).
Finally, Figures 7 and 8 show the coverage
and time-dependency of the different methods when
adding new sensors. Each color line corresponds to
the specified algorithm. On Figure 7, the different
points on each color line respectively indicate from
left to right the coverage for 1 and more sensors. For
Figure 4: Coverage distribution of random placement. Ran-
dom placements never reach the coverage of our algorithms
presented in Table 1.
Figure 5: Box plot of the coverage for each method. Mean
values can be found in Table 1.
Figure 6: Box plot of the time for each method. Mean val-
ues can be found in Table 1.
small numbers of sensors, we see that the coverage
still increases significantly. However, as expected,
from a certain number of sensors, the region’s cov-
erage is reaching its saturation point (close to 100%
in our case study) and adding further sensors do not
bring any significant improvement while leading to
an ever increasing computing time as it can easily
be seen from Figure 8. Indeed, with the same pre-
sentation, Figure 8 exhibits an ”almost linear” time-
dependency relative to the number of sensors. Imple-
menting a general method allowing us to find an opti-
Figure 7: Evolution of coverage for all methods related to
number of sensors.
Optimization of Sensor Placement for Birds Acoustic Detection in Complex Fields
557
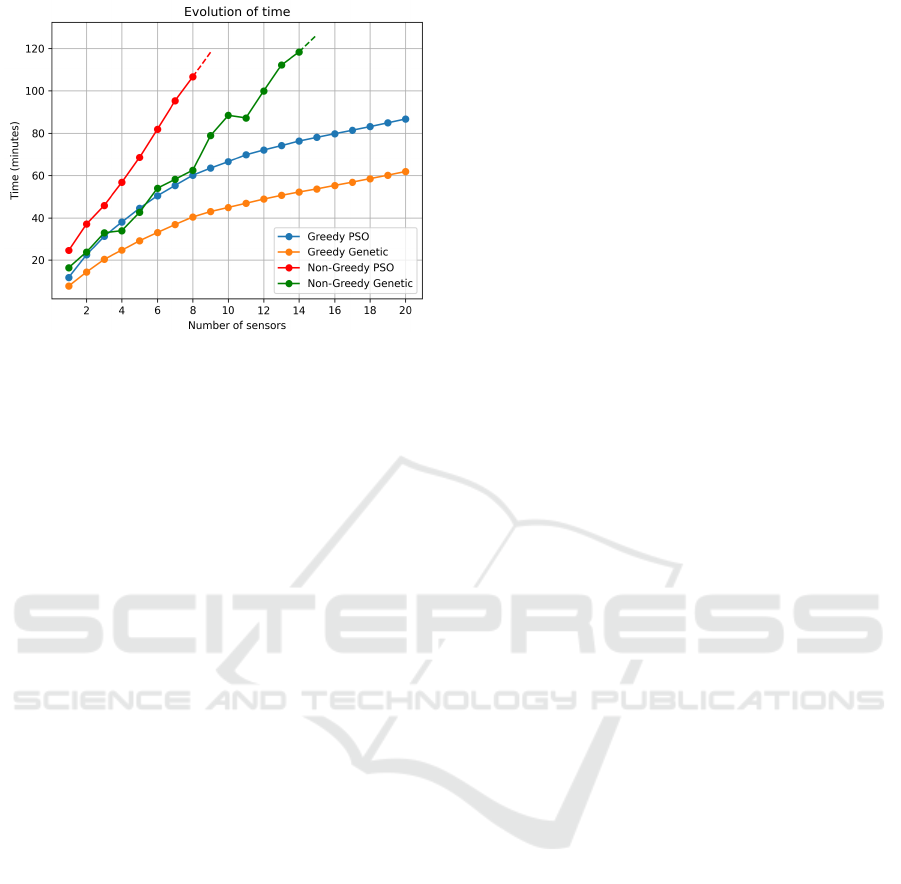
Figure 8: Evolution of time for all methods related to num-
ber of sensors.
mum between the number of sensors, the computing
time and the coverage will be the subject of further
developments. It is furthermore always possible to
add one or more sensors in our simulations. But for
the practical use of bird conservation for which our
system is intended, the number of detectors available
is often given by the means of ornithologists and re-
mains limited to a few units.
5 CONCLUSIONS
Acoustic recording is a widely used method for bird
conservation because of its low-cost. To scale-up
this method towards large networks, one central issue
is how to configure the network for the best cover-
age and the lowest number of recording devices. We
have developed a practical configuration method suit-
able for various realistic situations. This method pro-
vides a high level of confidence on the true acous-
tic coverage, which is particularly relevant in order to
demonstrate bird absence or scarcity. As such, this
tool entails a strong confidence level with respect to
bird occurrence and thus strongly support bird pop-
ulation monitoring and conservation. The proposed
solution will be proof tested in the field, using addi-
tional control devices within a test network and arti-
ficial sounds. The test will also allow to estimate the
impact on detection caused by by wind, rain or an-
thropogenic noise.
Being mostly conceived for urban environments,
the ISO 9613-2 sound propagation model allows con-
sidering additional aspects such as reflections and bar-
riers. For our application in mostly natural land-
scapes, the current solution does not integrate these
aspects. However, it could be interesting to consider
them to increase the accuracy of our model in hybrid
landscapes where nature and buildings are mixed.
The modularity of the proposed architecture eas-
ily allows testing the same approaches while swap-
ping one of its components. New sound propagation
models can replace or extend the ISO 9613-2 and new
algorithms could be tested and compared. For in-
stance, we used a simple PSO implementation while
some studies showed that modifications can improve
the optimisation outcome (Jakubcov
´
a et al., 2014).
Recently, Anurag et al. (Anurag et al., 2020) pro-
posed a PSO variant that makes use of the idea of
negative velocity to improve 2-D coverage. Their ap-
proach seemed to outperform the conventional PSO,
in particular with a reduced number of sensors. In
the future, it could be interesting to compare such an
approach as well as approaches based on completely
different techniques (e.g., multi-agent reinforcement
learning (Bus¸oniu et al., 2010)).
Finally, we developed here a method for optimiza-
tion of sensor placement for bird acoustic detection in
complex fields. However, more broadly, this kind of
methods can have important applications in problems
related to other species conservation, land use plan-
ning and noise protection.
ACKNOWLEDGEMENTS
This project is supported by the Swiss Federal Office
for the Environment (FOEN). We thank them for their
contribution.
REFERENCES
Anurag, A., Priyadarshi, R., Goel, A., and Gupta, B. (2020).
2-d coverage optimization in wsn using a novel variant
of particle swarm optimisation. In 2020 7th interna-
tional conference on signal processing and integrated
networks (SPIN), pages 663–668. IEEE.
Attenborough, K., Hayek, S. I., and Lawther, J. M. (1980).
Propagation of sound above a porous half-space.
The Journal of the Acoustical Society of America,
68(5):1493–1501.
Aybars, U. (2008). Path planning on a cuboid using genetic
algorithms. Information Sciences, 178(16):3275–
3287.
Bonyadi, M. R. and Michalewicz, Z. (2017). Particle
swarm optimization for single objective continuous
space problems: a review. Evolutionary computation,
25(1):1–54.
Bus¸oniu, L., Babu
ˇ
ska, R., and De Schutter, B. (2010).
Multi-agent reinforcement learning: An overview. In-
novations in multi-agent systems and applications-1,
pages 183–221.
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
558

Caselton, W. F. and Zidek, J. V. (1984). Optimal monitor-
ing network designs. Statistics & Probability Letters,
2(4):223–227.
Chandler-Wilde, S. and Hothersall, D. (1985). Sound prop-
agation above an inhomogeneous impedance plane.
Journal of Sound and Vibration, 98(4):475–491.
Cressie, N. and Moores, M. T. (2021). Spatial statistics.
arXiv preprint arXiv:2105.07216.
de Hoop, A. T., Lam, C.-H., and Kooij, B. J. (2005).
Parametrization of acoustic boundary absorption and
dispersion properties in time-domain source/receiver
reflection measurement. The Journal of the Acousti-
cal Society of America, 118(2):654–660.
Federal Office of Topography (2021). Swisstopo federal
office of topography.
Gonz
´
alez-Banos, H. (2001). A randomized art-gallery al-
gorithm for sensor placement. In Proceedings of the
seventeenth annual symposium on Computational ge-
ometry - SCG '01. ACM Press.
Guillaume, G., Aumond, P., Gauvreau, B., and Dutilleux,
G. (2014). Application of the transmission line ma-
trix method for outdoor sound propagation modelling
– part 1: Model presentation and evaluation. Applied
Acoustics, 76:113–118.
ISO 9613-2:1996(F) (1996). Acoustique - att
´
enatuation du
son lors de sa propagation
`
a l’air libre - partie 2 :
M
´
ethode g
´
en
´
erale de calcul. Standard, International
Organization for Standardization, Geneva, CH.
Jakubcov
´
a, M., M
´
aca, P., and Pech, P. (2014). A comparison
of selected modifications of the particle swarm opti-
mization algorithm. Journal of Applied Mathematics,
2014.
Kennedy, J. and Eberhart, R. (1995). Particle swarm opti-
mization. In Proceedings of ICNN’95-international
conference on neural networks, volume 4, pages
1942–1948. IEEE.
Krause, A., Singh, A., and Guestrin, C. (2008). Near-
optimal sensor placements in gaussian processes:
Theory, efficient algorithms and empirical studies.
Journal of Machine Learning Research, 9(8):235–
284.
Kulkarni, R. V. and Venayagamoorthy, G. K. (2010). Par-
ticle swarm optimization in wireless-sensor networks:
A brief survey. IEEE Transactions on Systems, Man,
and Cybernetics, Part C (Applications and Reviews),
41(2):262–267.
Lam, Y. W. and Monazzam, M. R. (2006). On the mod-
eling of sound propagation over multi-impedance dis-
continuities using a semiempirical diffraction formu-
lation. The Journal of the Acoustical Society of Amer-
ica, 120(2):686–698.
Pal, P., Sharma, R. P., Tripathi, S., Kumar, C., and Ramesh,
D. (2021). Genetic algorithm optimized node deploy-
ment in ieee 802.15. 4 potato and wheat crop monitor-
ing infrastructure. Scientific Reports, 11(1):1–12.
Pi
˜
na-Covarrubias, E., Hill, A. P., Prince, P., Snaddon, J. L.,
Rogers, A., and Doncaster, C. P. (2019). Optimization
of sensor deployment for acoustic detection and local-
ization in terrestrial environments. Remote Sensing in
Ecology and Conservation, 5(2):180–192.
Premat, E. and Gabillet, Y. (2000). A new boundary-
element method for predicting outdoor sound propa-
gation and application to the case of a sound barrier in
the presence of downward refraction. The Journal of
the Acoustical Society of America, 108(6):2775–2783.
Ramakrishnan, N., Bailey-Kellogg, C., Tadepalli, S., and
Pandey, V. N. (2005). Gaussian Processes for Active
Data Mining of Spatial Aggregates, pages 427–438.
Raspet, R., Lee, S. W., Kuester, E., Chang, D. C., Richards,
W. F., Gilbert, R., and Bong, N. (1985). A fast-
field program for sound propagation in a layered at-
mosphere above an impedance ground. The Journal
of the Acoustical Society of America, 77(2):345–352.
tisimst (2015). Particle swarm optimization (pso) with con-
straint support.
Whitley, D. (1994). A genetic algorithm tutorial. Statistics
and computing, 4(2):65–85.
Yang, X. (2008). Introduction to mathematical optimiza-
tion. From linear programming to metaheuristics.
Younis, M. and Akkaya, K. (2008). Strategies and tech-
niques for node placement in wireless sensor net-
works: A survey. Ad Hoc Networks, 6(4):621–655.
ZainEldin, H., Badawy, M., Elhosseini, M., Arafat, H., and
Abraham, A. (2020). An improved dynamic deploy-
ment technique based-on genetic algorithm (iddt-ga)
for maximizing coverage in wireless sensor networks.
Journal of Ambient Intelligence and Humanized Com-
puting, pages 1–18.
Optimization of Sensor Placement for Birds Acoustic Detection in Complex Fields
559
