
Empirical Analysis of Limits for Memory Distance in Recurrent Neural
Networks
Steffen Illium, Thore Schillman, Robert M
¨
uller, Thomas Gabor and Claudia Linnhoff-Popien
Institute for Informatics, LMU Munich, Oettingenstr. 67, Munich, Germany
Keywords:
Memory Distance, Memory Capacity, Recurrent Neural Networks, Machine Learning, Deep Learning.
Abstract:
Common to all different kinds of recurrent neural networks (RNNs) is the intention to model relations between
data points through time. When there is no immediate relationship between subsequent data points (like when
the data points are generated at random, e.g.), we show that RNNs are still able to remember a few data points
back into the sequence by memorizing them by heart using standard backpropagation. However, we also show
that for classical RNNs, LSTM and GRU networks the distance of data points between recurrent calls that
can be reproduced this way is highly limited (compared to even a loose connection between data points) and
subject to various constraints imposed by the type and size of the RNN in question. This implies the existence
of a hard limit (way below the information-theoretic one) for the distance between related data points within
which RNNs are still able to recognize said relation.
1 INTRODUCTION
Neural networks (NNs) have established themselves
as the premier approach to approximate complex
functions (Engelbrecht, 2007). Although NNs in-
troduce comparatively many free parameters (i.e.,
weights that need to be assigned to correctly instan-
tiate the function approximation), they can still be
trained efficiently using backpropagation (Rumelhart
et al., 1986), often succeeding the performance of
more traditional methods. This makes neural net-
works rather fit for tasks like supervised learning and
reinforcement learning, when hard-coded algorithms
are complicated to build or possess long processing
times. In general, NNs can be trained using back-
propagation whenever a gradient can be computed on
the loss function (i.e., the internal function is differ-
entiable).
One of the crucial limitations of standard NNs is
that their architecture is highly dependent on rather
superficial properties of the input data. To change
the architecture during training, one has to deviate
from pure gradient based training methods (Stanley
and Miikkulainen, 2002). However, these methods
still do not allow the shape of input data to change
dynamically, thus allowing various input lengths to be
processed by the same NN model.
Common use cases like the classification of (vari-
ous length) time series data have inspired the concept
of Recurrent Neural Networks (RNNs, cf. (Rumelhart
et al., 1986)): They apply the network to a stream
of data piece by piece, while allowing the network to
connect to the state it had when processing the pre-
vious piece. Thus, information can be carried over
when processing the whole input stream. We pro-
vide more details on the inner mechanics of RNNs
and their practical implementation in Section 2. Long
Short-Term Memory networks (LSTMs, cf. (Hochre-
iter and Schmidhuber, 1997)) are an extension of
RNNs: They introduce more connections (and thus
also more free parameters) that can handle the pass-
ing of state information from input piece to input
piece more explicitly (again, cf. Section 2 for a more
detailed description). Based on the LSTM architec-
ture, Cho et al. introduced the Gated Recurrent Unit
(GRU) with smaller numbers of free parameters but
comparable training achievements depending on the
task (Cho et al., 2014; Chung et al., 2014).
All kinds of RNNs have been built around the idea
that carrying over some information throughout pro-
cessing the input data stream allows the networks to
recognize connections and correlations between data
points along the stream. For example, when we want
to predict the weather by the hour, it might be benefi-
cial to carry over data from the last couple of days as
to know how the weather was at the same time of day
yesterday. However, it is also clear that (as the num-
ber of connections ”to the past” is still fixed given a
308
Illium, S., Schillman, T., Müller, R., Gabor, T. and Linnhoff-Popien, C.
Empirical Analysis of Limits for Memory Distance in Recurrent Neural Networks.
DOI: 10.5220/0010818500003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 308-315
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
tt−1 t+1
x
Unfold
V
W
V
U
U U U
s
o
s
t−1
o
t−1
o
t
s
t
s
t+1
o
t+1
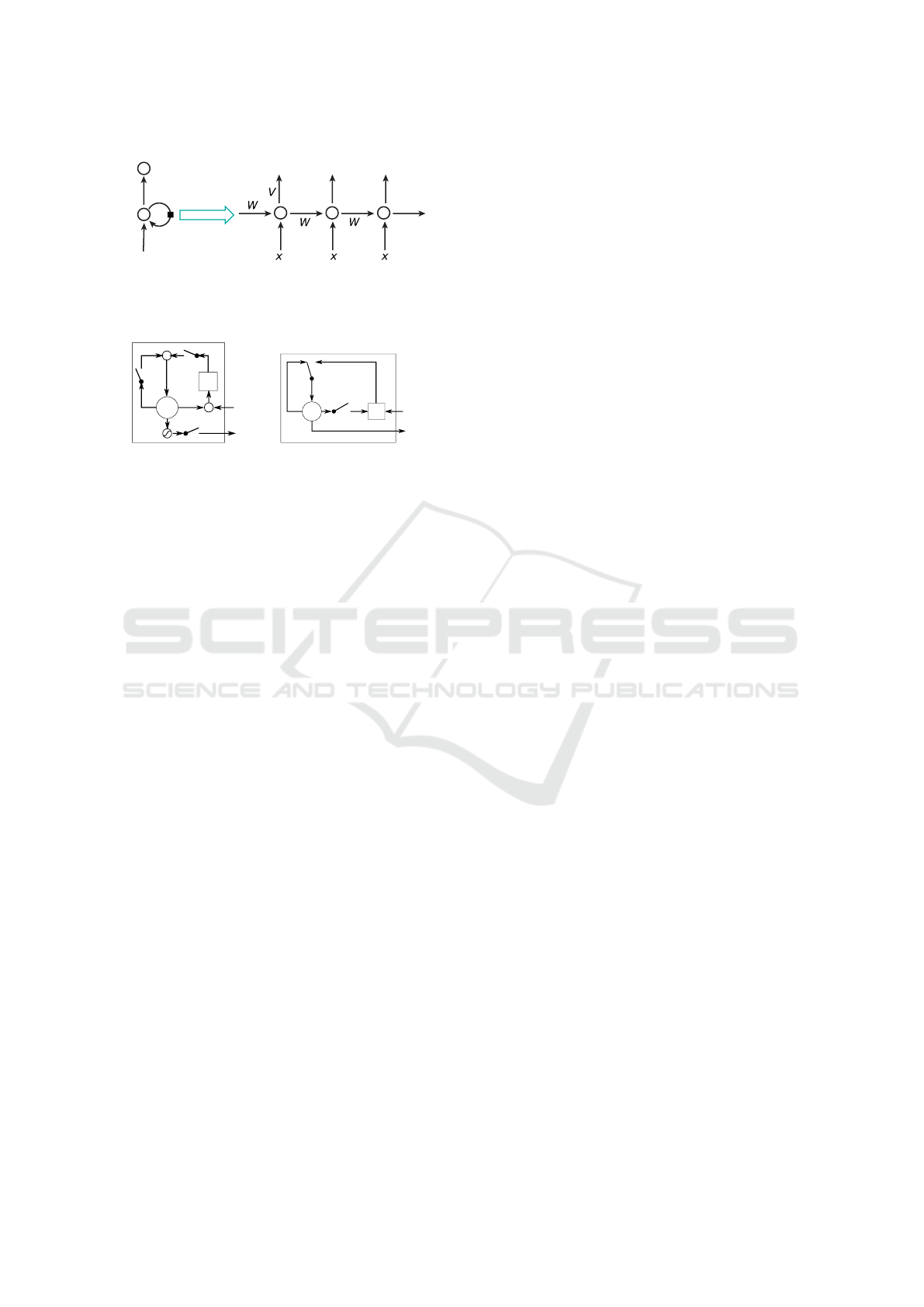
Figure 1: ”A recurrent neural network and the unfolding in
time of the computation involved in its forward computa-
tion.” Image taken from (LeCun et al., 2015).
f
c
c
~
+
+
o
i
IN
OUT
z
r
h
h
~
IN
OUT
(a) LongShort-TermMemory
(b) GatedRecurrent Unit
Figure 2: ”Illustration of (a) LSTM and (b) gated recurrent
units. (a) i, f and o are the input, forget and output gates,
respectively. c and ˜c denote the memory cell and the new
memory cell content. (b) r and z are the reset and update
gates, and h and
˜
h are the activation and the candidate acti-
vation.” Image taken from (Chung et al., 2014).
single instance of an RNN) the amount of information
that can be carried over is subject to a hard theoretical
limit. In practice, of course, NNs are hardly capa-
ble of precisely manipulating every single bit of their
connections, so the practical limit for remembering
past pieces of the input stream must be way below the
inputs vector information memory size.
In this paper, we first show that the memorization
of random inputs can in fact be learned by RNNs and
then recognize a hard practical limit to how far a given
RNN architecture can remember the past. We con-
struct the memorization experiment in Section 3). Our
experiments show that a distance limit, i.e., the loss of
the ability to store and reproduce values, occurs very
prominently, of course varying with the type and ar-
chitecture of the RNN (cf. Section 4).
While these experiments explore the basic work-
ings of RNNs, we are not aware of other research as-
sessing a comparable limitation on RNNs. Closest re-
lated work is discussed in Section 5. The existence of
a hard limit in memory distance may have several im-
plications on the design and usage of RNNs in theory
and practice like how big an RNN needs to be so that
it is able to remember the weather from 24 hours ago,
e.g., which we briefly discuss as this paper concludes
(cf. Section 6).
2 FOUNDATIONS
We consider the three most popular types of RNNs for
experiments on their respective memory limits. In this
section, we give a quick recap on their most relevant
properties.
2.1 Recurrent Neural Networks
Recurrent Neural Networks (RNNs) were the first
models introduced to process data sets that imply a
temporal dependency on sequential inputs (Schmid-
huber, 2015).
While (given an input vector x = hx
i
i
1≤i≤q,i∈N
of
length q ∈ N) one element x
i
at a time is processed,
a hidden state vector h carries the history of all the
past elements of the sequence (LeCun et al., 2015).
Finally, a tanh activation function shifts the inter-
nal states to the nodes of the output layer. Given a
sequential input x and an activation function g, the
output state for every time step t is h
t
= g(Wx
t
+
Uh
t−1
) (Chung et al., 2014). RNNs can be thought of
as single layer of neural cells, which is reused mul-
tiple times on a sequence while taking track of all
subsequent computations (cp. Figure 1). Therefore,
every position of the output vector z is influenced by
the combination of every previously evaluated input
as described by:
z = tanh((x wx + b) +(ws s)) (1)
2.2 Long Short-Term Memory
Networks
While regular RNNs are known for their problems in
understanding long-time dependencies as the gradi-
ent either explodes or vanishes (LeCun et al., 2015;
Chung et al., 2014; Schmidhuber, 2015), Hochre-
iter and Schmidhuber introduced the Long Short-Term
Memory (LSTM) unit (Hochreiter and Schmidhuber,
1997). The main difference lies in the ”connec-
tion to itself at the next time step through a mem-
ory cell” (LeCun et al., 2015) as well as a forget
gate, that regulates the temporal connection (cp. Fig-
ure 2, a). Layers equipped with LSTM cells can learn
what to forget while remembering valuable inputs in
long temporal sequences. However, this functionality
comes at a high computational cost in total trainable
parameters N = 4 ·(mn +n
2
+ n) where m is the input
dimension, and n is the cell dimension. This consti-
tutes a four-fold increase in comparison to a RNN (Lu
and Salem, 2017).
Empirical Analysis of Limits for Memory Distance in Recurrent Neural Networks
309
2.3 Gated Recurrent Unit Networks
Cho et al. proposed a new LSTM variant, Gated Re-
current Unit (GRU) with reduced parameters and no
memory cell. At first ”the reset gate r decides whether
the previous hidden state is ignored”, then ”the up-
date gate z selects whether the hidden state is to be
updated”. In combination with the exposure of the
hidden state, the internal decision gates could be re-
duced from four to ”only two gating units”, so that the
overall number of trainable parameters per layer acti-
vation decreases (see (Cho et al., 2014; Chung et al.,
2014); cp. Figure 2, a). In short, a GRU cell is a hid-
den layer unit that ”includes a reset gate and an update
gate that adaptively control how much each hidden
unit remembers or forgets while reading/generating a
sequence” (Cho et al., 2014). Even though (Chung
et al., 2014) did not prefer GRU over LSTM in an em-
pirical testing setup, they saw that the usage ”may de-
pend heavily on the dataset and corresponding task”.
2.4 Echo State Networks
Echo state networks (ESNs) are a type of reser-
voir computer, independently developed by Herbert
Jaeger (Jaeger, 2001) and Wolfgang Maass (Maass
et al., 2002). Reservoir computing is a framework
which generalises many neural network architectures
utilising recurrent units. ESNs differ from ”vanilla”
RNNs in that the neurons are sparsely connected
(typically around 1% connectivity) and the reservoir
weights are fixed. Also, connections from the input
neurons to the output as well as looping connections
in the reservoir (hidden layer) are allowed, see Fig-
ure 3.
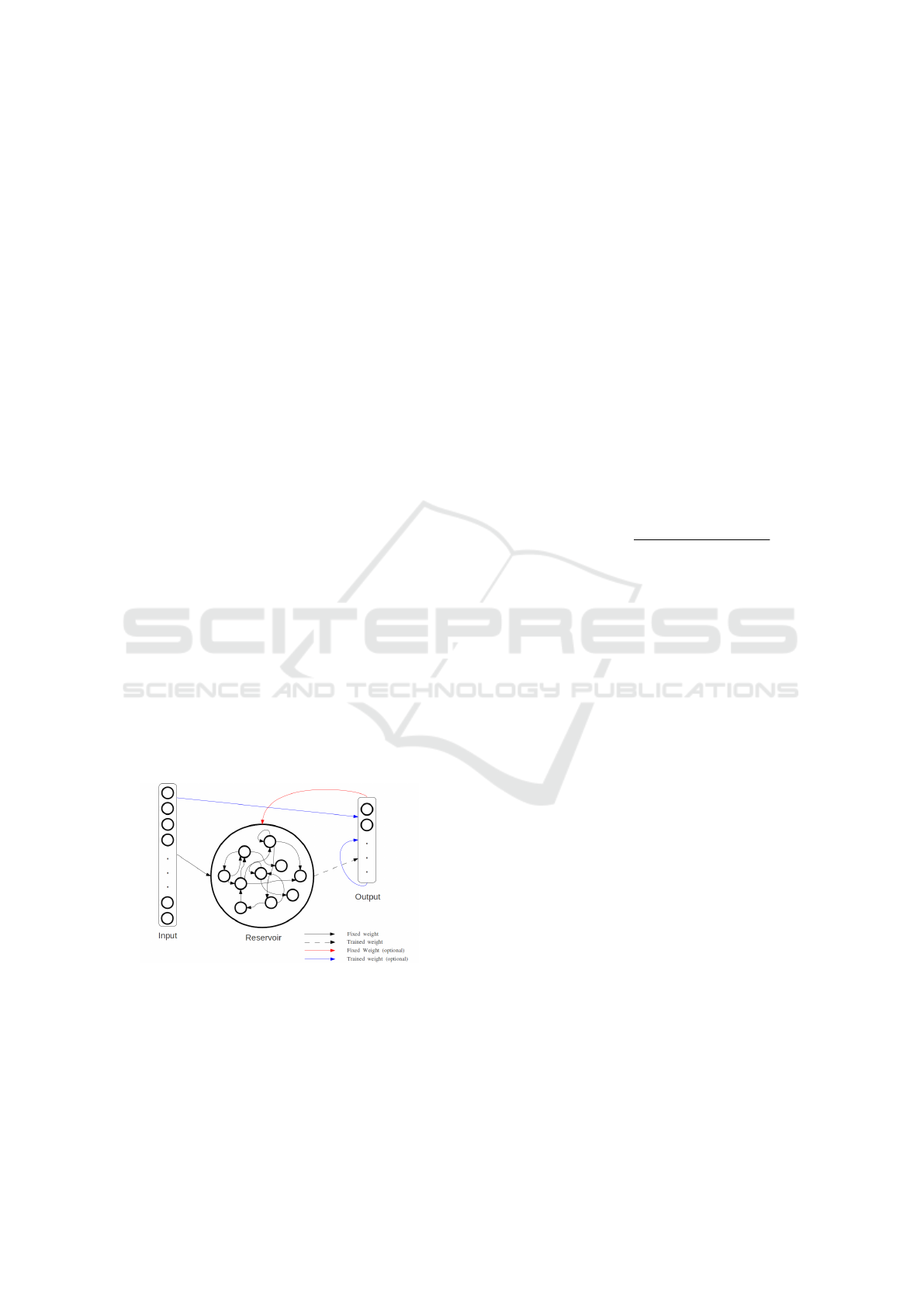
Figure 3: An ESN with all possible kinds of connections.
The legend denotes which ones are fixed, trainable and op-
tional.
Unlike most recurrent architectures in use today,
ESNs are not trained via backpropagation though
time (BPTT), but simple linear regression on the
weights to the output units. Having fixed reservoir
weights makes the initialization even more important.
Well initialized ESNs display the echo state property,
which guarantees, after an initial transient, that the
activation state is a function of the input history:
h
t
= E(..., x
t−1
, x
t
) (2)
Here, E denotes an echo function E = (e
1
, ..., e
N
) with
e
i
: U
−N
→ R being the echo function of the i-th unit.
Several conditions for echo states have been pro-
posed, the most well-known stating that the spectral
radius and norm of the reservoir matrix must be below
unity (Jaeger, 2001). This has been shown to neither
be sufficient nor necessary (Yildiz et al., 2012; Mayer,
2017), but remains a good rule of thumb.
The amount of information from past inputs that
can be stored in the ESNs transient state dynamics
is often called its short-term memory and is typically
measured by the memory capacity (MC), proposed by
Jaeger (Jaeger, 2001). It is defined by the coefficient
of correlation between input and output, summed over
all time delays
MC =
∞
∑
k=1
MC
k
=
∞
∑
k=1
cov
2
(x(t − k), y
k
(t))
Var(x(t)) ∗Var(y
k
(t))
(3)
and thus, measures how much of the inputs variance
can be recovered by optimally trained output units. It
has been shown by Jaeger that the MC of an ESN with
linear output units is bounded above by its number of
reservoir neurons N.
ESNs predate the deep learning revolution.
Nonetheless, deep variants of ESNs have recently
been proposed (Gallicchio and Micheli, 2017) to
make use of the advantages of layering. Reservoir
computing is an active field of research, as the models
are less expensive to train, often biologically plausi-
ble (Buonomano and Merzenich, 1995) and allow for
precise description of state dynamic properties due to
the fixed weights of the reservoir.
3 METHODOLOGY
To reveal the limits of distance in which information
can be carried over from past states h
t−n
through re-
current connections of RNN type networks, we con-
struct a task in which the RNN is forced to remember
a specific input of the input data stream x.
This implies that there must not be any correla-
tion between the pieces of the input data stream so
that there is no way to reconstruct past pieces with-
out fully passing in their values through the recurrent
connections to all future applications of the RNN. We
implemented this experiment using random-length se-
quences of random numbers as input data to the RNN.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
310

The task (cf. Def. 1) is the reproduction of the pth-
from-last input throughout a training setup for a set
p ∈ N.
However, since the sequences are of random
lengths, the RNN cannot recognize which piece of
the input stream will be needed until the very last ap-
plication. This forces the RNN to carry over all the
information it can from the input stream. We argue
that this is the canonical experiment to test memo-
rization abilities of RNNs. This task definitions are in
stark contrast to common applications of RNNs where
one explicitly expects some correlations between the
pieces of the input sequence and thus uses RNNs to
approximate a model of said connections.
Definition 1 (Random Memorization Task). Let q be
a random number uniformly sampled from [10;15] ⊆
N. Let x = hx
i
i
1≤i≤q,i∈N
be a sequence of random
numbers x
i
each uniformly sampled from [0;1] ⊆ R.
Let R be an RNN that is applied to the sequence x
in order with the result R (x) of the last application.
The memorization task of the pth-from-last position
is given by the minimizing goal function f
p
(R , x) =
|x
q+1−p
− R (x)|.
Note that the random length of the sequence is
substantial. Otherwise, an RNN trained to reproduce
the pth-from-last position may count the position of
the pieces of the input sequence from the start, mak-
ing it rather easy to remember the qth-from-last (i.e.,
first) position. In complexity terms, this task requires
space complexity of O(1). These claims are supported
by our experiments in Section 4, where we also test a
fixed-length memorization task:
Definition 2 (Fixed-Length Random Memorization
Task). Let q = 10. For all else, refer to Def. 1.
4 EXPERIMENTAL RESULTS
To evaluate the task described in Definitions 1 we
conducted several experiments with different configu-
rations of RNNs, LSTMs, and GRUs. A configuration
is specified by the number of layers l of the network
and the number of cells per layer c. We disregarded
any complex architectural pattern by just examining
standard fully connected recurrent layers as well as
modern network training techniques such as gradient
clipping or weight decay in favor of comparability.
Layers’ outputs from more than c ≥ 1 cells are added
up. Weight updates are applied by stochastic gradient
descent (SGD) and the truncated backpropagation al-
gorithm. Training data is generated by sampling from
a Mersenne Twister pseudo-random number genera-
tor. Every network configuration was trained for up to
5000 epochs for 5 different random seeds if not stated
otherwise.
Random Memorization We start by evaluating the
random memorization task (cf. Definition 1). We
run a simple scenario with l = 1 layer and c = 5
cells within that layer. We conducted 10 indepen-
dent training runs each for every position to memo-
rize from ”position -1”, i.e., the last position or p = 1,
to ”position -10”, i.e., the 10th-from-last position or
p = 10. Figure 4 shows the results for an RNN plot-
ting the loss over training time: Reproducing posi-
tions 1 ≤ p ≤ 4 is learned quickly so that most runs
overlap at the bottom of the plot. p = 5 seems to be
harder to learn as some runs take distinctively more
time to reach a loss close to zero, but the 5th-from-
last random memorization task is still learned reliably.
Positions 6 ≤ p ≤ 8 seem to stagnate not being able to
reduce the loss beyond around 0.15, which still means
that some information about these positions’ original
value is being passed on, though. However, the net-
work greatly loses accuracy and cannot reliably repro-
duce the values. We observe another case in most runs
of positions p = 9 and p = 10, where the loss seems
to stagnate at around 0.25: Note that for the random
memorization task of sequence values x
i
∈ [0; 1] ⊆ R a
static network without any memorization can simply
always predict the fixed value R (x) = 0.5 to achieve
an average loss of 0.25 on a sequence of random num-
bers. At least, that trick is easily learned by all setups
of RNNs.
We compare those results to experiments executed
for LSTMs in Figure 5. First, we notice that the
LSTM takes much longer training time for the simpler
positions 1 ≤ p ≤ 5, which are all learned eventually
but show a clear separation. This result is intuitive
considering the additional number of weights (total
size 4 ·(mn + n
2
+ n) for m input elements and n neu-
rons), i.e., trainable parameters, for the same size of
network compared to RNNs (total size mn + n
2
+ n).
On the other hand, we can observe that LSTMs still
show some learning progress on all positions p after
the 500 epochs plotted here, especially having a run
of position p = 6 taking off towards near-optimal loss.
Thus, there is reason to believe that LSTMs may even-
tually prove to be considerably more powerful than
RNNs given significantly longer training times on our
task.
For a more complete overview of the limits of
performance in the random memorization task we
ran this experiment for different number of layers
l ∈ [1; 5] and cells per layer c ∈ [1; 20] ⊆ N as well
as for the pth-from-last positions p ∈ [1; 20] ⊆ N as
a target. Figure 6 shows the results for RNNs. The
color of the respective dots encoding the average loss
Empirical Analysis of Limits for Memory Distance in Recurrent Neural Networks
311
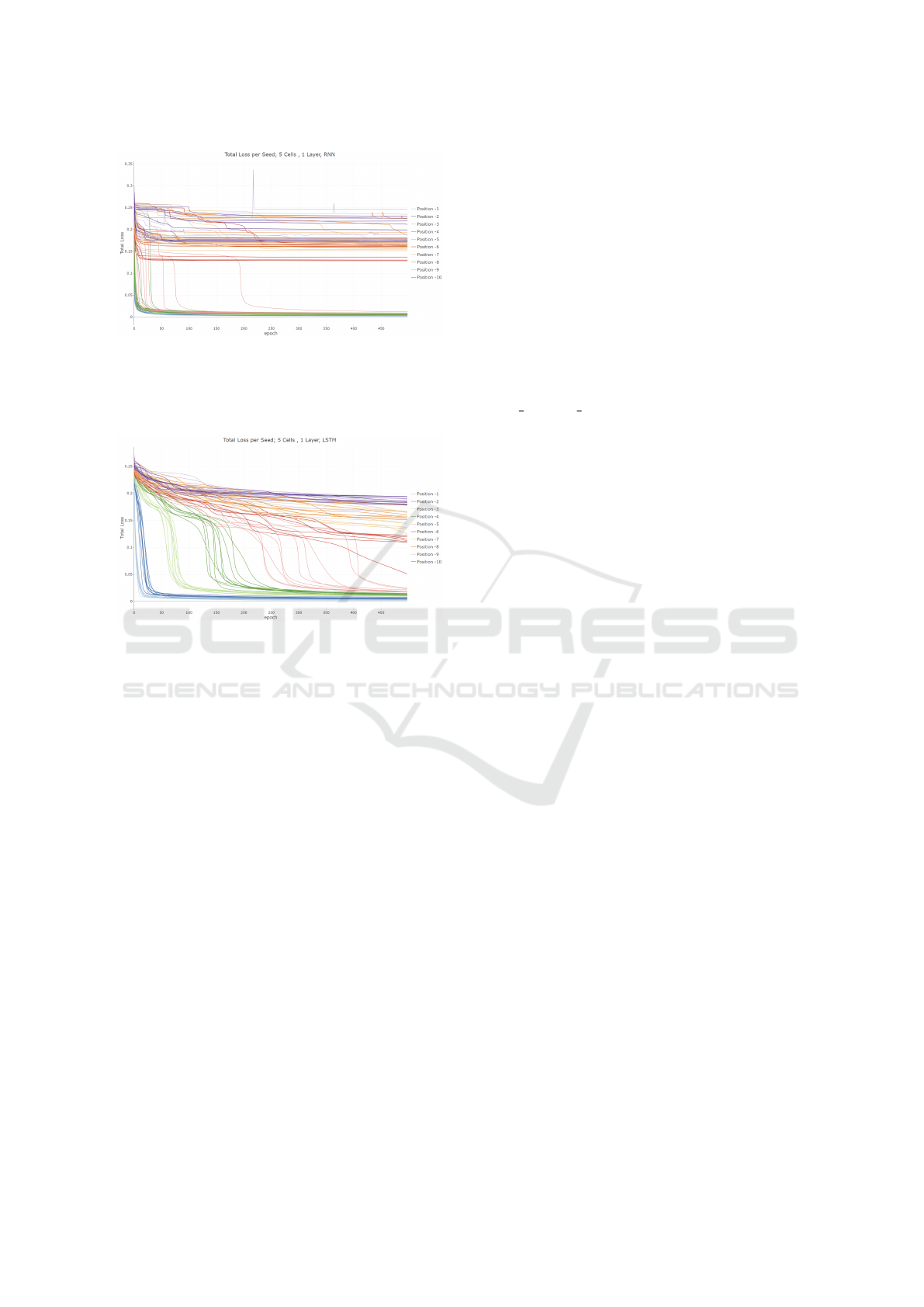
Figure 4: Absolute loss for an RNN with l = 1 layer and c =
5 cells when asked to reproduce the pth-from-last position
(for p ∈ [1; 10]) of a random sequence of random length
q ∈ [10; 15]. Every color shows 10 different training runs
(with different random seed) for a single p.
Figure 5: Absolute loss for an LSTM with l = 1 layer and
c = 5 cells when asked to reproduce the pth-from-last posi-
tion (for p ∈ [1;10]) of a random sequence of random length
q ∈ [10; 15]. Every color shows 10 different training runs
(with different random seed) for a single p.
over 5 independent runs, the scale of the loss is again
fitted to 0.25 as all RNNs manage to learn that fixed
guess as discussed above. We can observe that the
1-layer 1-cell network at the bottom left only learns
to reproduce the last value of the random sequence,
which it can do without any recurrence by just learn-
ing the identity function. It is thus clear why all RNNs
manage to solve this instance. Furthermore, we can
clearly see a monotone increase in difficulty when in-
creasing the position, i.e., forcing the network to re-
member more of the sequence’s past. This shows that
no network can learn a generalization of the task that
can memorize arbitrary positions as presumed when
constructing the task.
What is possibly the most interesting result of
these experiments is that the number of instances re-
sulting in average losses of around [0.05;0.2] (colored
in light blue, green) is relatively small: Certain posi-
tions can either be reproduced very clearly or barely
better than the fixed guess (purple, orange), cf. Fig-
ure 7. This implies a strong connection between the
amount of information that can be passed on through-
out the RNN. Furthermore, we can observe that more
cells and more layers (which also bring more cells
to the table) clearly help in solving the memoriza-
tion task. Interestingly, even parallel architectures as
shown for the networks with only one layer (l = 1)
become better with more cells. The connection here
appears almost linear: Within our result data, a one-
layer network with c = n cells can always memorize
the nth-from-last position (p = n) very well.
Figure 8 shows the same experimental setup as de-
scribed above for LSTM networks. In line with the
observation about the loss plots (cf. Figure 5), LSTMs
do not perform as well as RNNs on this task, i.e.,
not satisfyingly solving any position p = 10 instance
(mean absolute loss ≥ 0.04). However, as described
above we conjecture this stems from the fact that the
higher number of weights present in an LSTM net-
work requires substantially longer training times be-
yond what could be performed as part of this experi-
ment. These results still have practical implications:
As this relatively small task consumes large compu-
tational resources, LSTMs seem to be inefficient at
least at (smaller instances of) the random memoriza-
tion task, at least for single layer networks.
We also conducted the same experiments for GRU
networks, as shown in Figure 8. The GRUs’ behav-
ior appears most similar to LSTMs’. We will use
this experiment as a basis to refrain from showing
GRU plots for other experiments since GRUs have
performed that similarly throughout all our experi-
ments. However, note that GRUs require fewer pa-
rameters (N = 3 · (mn + n
2
+ n)), making them in-
teresting for efficient practical applications (Dey and
Salemt, 2017).
Our results indicate that Jaegers upper bound on
ESN short-term memory remains valid in the context
of deep RNN architectures trained by backpropaga-
tion (RNN, LSTM, GRU). For stacked, multi-layer
architectures, the maximum memory capacity could
not be reached. Instead, we observed an upper bound
of MC ≤ N − (l − 1) with N = c ∗ l.
4.1 Fixed-length Random
Memorization
We now quickly discuss the scenario of Definition 2:
In this case, we fix the length of the random sequence
q = 10. This means that in theory it is possible to
”count” the positions from the start and thus know
exactly when the currently processed piece of the in-
put data stream needs to be memorized, sparing the
effort of memorizing as many of them as possible un-
til the end. We thus consider this task strictly easier
and our experimental results shown in Figure 9 sup-
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
312
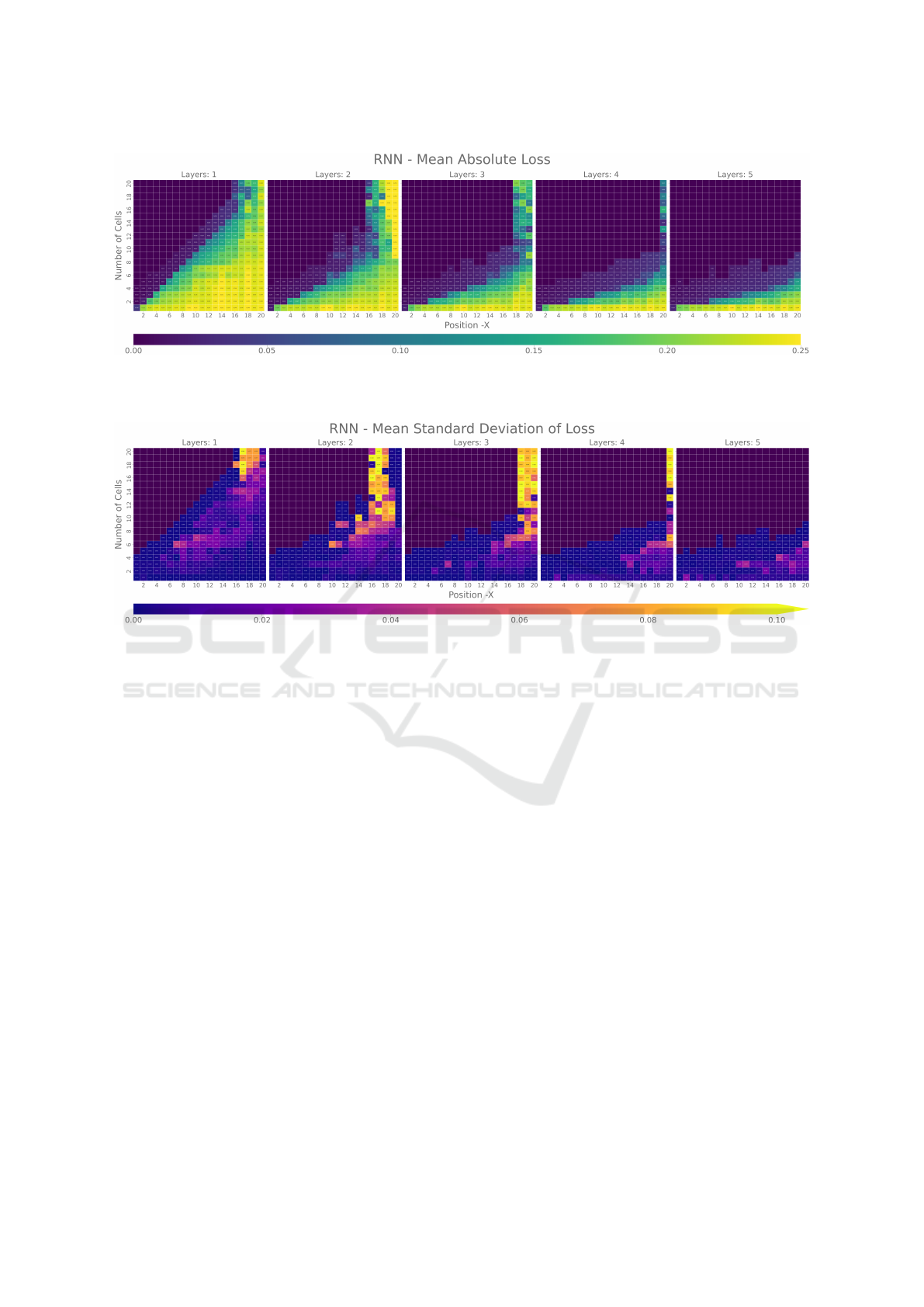
Figure 6: Mean absolute loss for various configurations of RNNs with l ∈ [1;5] layers with c ∈ [1; 20] cells each when asked
to reproduce the pth-from-last position (for p ∈ [1; 20]) of a random sequence of random length q ∈ [10; 15]. Every data point
is averaged over 5 runs.
Figure 7: Standard Deviation for various configurations of RNNs with l ∈ [1;5] layers with c ∈ [1; 20] cells each when asked
to reproduce the pth-from-last position (for p ∈ [1; 20]) of a random sequence of random length q ∈ [10; 15]. Every data point
is averaged over 5 runs.
port this. However, the strategy of ”counting from
the start” seems to be subject to some memory limita-
tions as well. Thus, while every instance that is eas-
ily learned in the case of variable-length sequences
is also learnable in this scenario, further learnable in-
stances appear from the right of the plot, i.e., p = 10
for the 1-layer 2-cells network and p ≥ 8 for the 2-
layers 2-cells-each network. This shows that the RNN
is not exactly able to count through the sequence it
is given but able to memorize pieces from the start,
within a similar limit as from the end of the sequence.
As LSTMs and GRUs show a similar behavior, we
omit the respective plots for brevity.
5 RELATED WORK
Recent studies on recurrent neural networks mostly
focused on memory afforded by attractor dynamics
or weight changes while learning. Both are only use-
ful in the context of temporally correlated data, as the
model settling in a low dimensional state space would
not be desirable when every data point is equally im-
portant. As RNNs have been conceived precisely to
recognize and model dependencies in sequential data,
their ability to deal with i.i.d. or uncorrelated input
might seem to be of little importance. We argue that
this capability is an integral part of RNN memory and
performance, which has long been recognized in the
reservoir computing literature. For tasks where the
output should depend strongly on the whole input his-
tory, we require a unique, clearly distinguishable hid-
den state for every input. Using uncorrelated data,
we can approximate the total amount of information
the architecture can store in its transient activation dy-
namics.
In addition, and specific to RNN-architectures a
lot of empirical evaluations on various LSTM and
RNN configurations and tasks already exist. Hochre-
iter and Schmidhuber for example evaluated LSTM
cells from the beginning. They conjectured that
gradient-based approaches suffer from practical in-
ability to precisely count discrete time steps and
therefore assume the need for an additional count-
ing mechanism (Hochreiter and Schmidhuber, 1997).
However, our experiments show that an explicit
counting mechanism might not be necessary, even
Empirical Analysis of Limits for Memory Distance in Recurrent Neural Networks
313
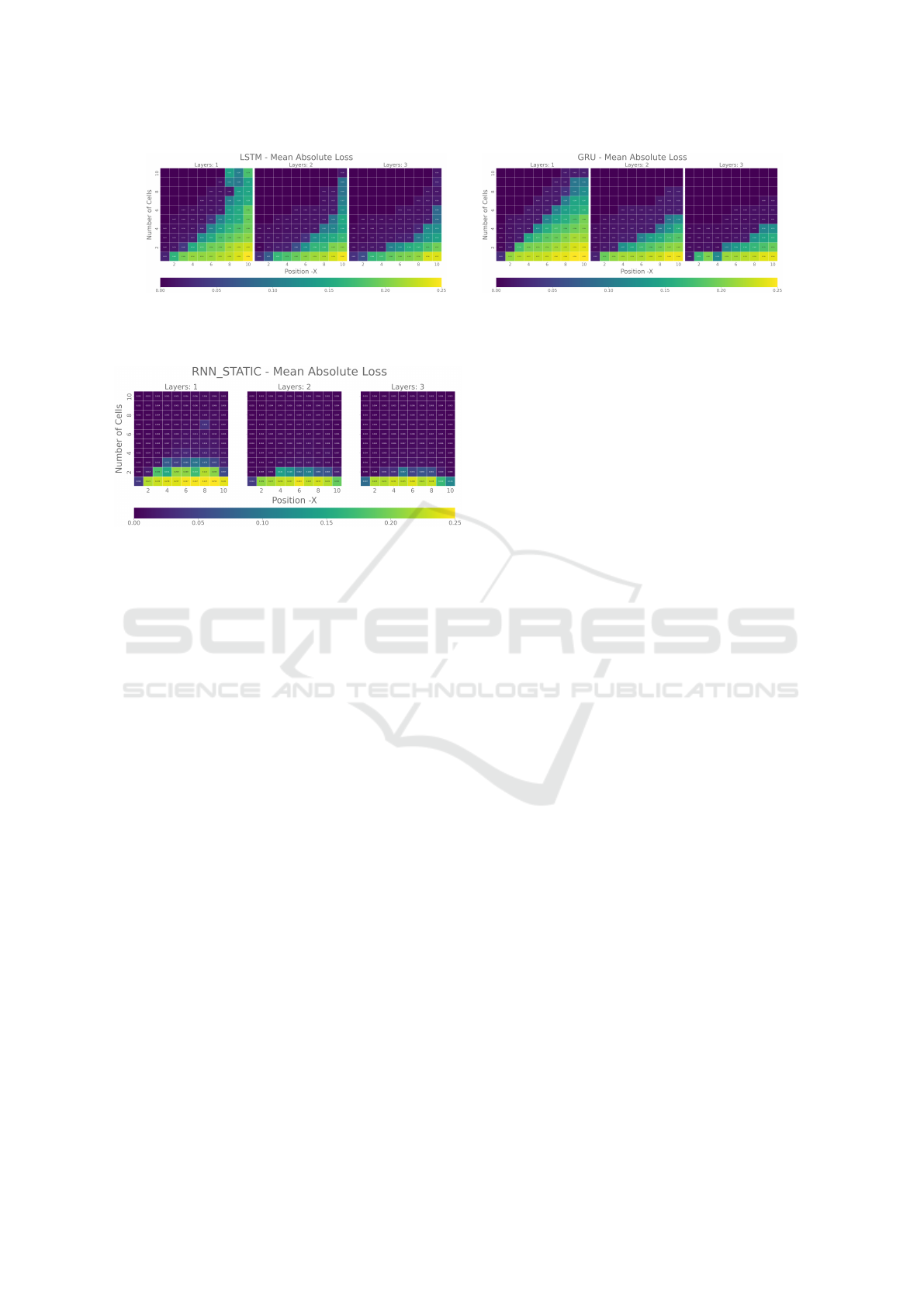
Figure 8: Mean absolute loss for various configurations of LSTMs (left) and GRU (right) with l ∈ {1, 2, 3} layers with
c ∈ [1; 10] cells each when asked to reproduce the pth-from-last position (for p ∈ [1; 10]) of a random sequence of random
length q ∈ [10; 15]. Every data point is averaged over 10 runs.
Figure 9: Mean absolute loss for various configurations of
RNNs with l ∈ {1, 2, 3} layers with c ∈ [1; 10] cells each
when asked to reproduce the pth-from-last position (for p ∈
[1;10]) of a random sequence of fixed length q = 10. Every
data point is averaged over 10 runs.
for models, trained on random sequences (i.e., pure
noise). At least for the extend of our observations.
First experiments on the ability of an RNN to carry
information over some distance in the input sequence
were conducted (Cleeremans et al., 1989). Liken-
ing an RNN to a finite state automaton (for more
details on that line of thought (Giles et al., 1992)),
they trained a network to recognise an arbitrary but
fixed regular grammar. Interestingly, they concluded
that a recurrent network can encode information about
long-distance contingencies only as long as informa-
tion about critical past events is relevant at each time
step, which again contrasts our results on random se-
quences.
Little research has been performed on random se-
quences of variable length as inputs for RNNs. One
could argue that experiments 4 and 5 by Hochreiter
and Schmidhuber are of relevance here (Hochreiter
and Schmidhuber, 1997). However, we like to stress
that our work is focused on random sequences both in
length and value to reproduce an element x
i
on a spe-
cific position without providing any form of hint such
as additional labelling or encoding. We see our work
in contrast to these early experiments, as we test for
maximal signal remoteness for a given computational
budget and not necessary for memory endurance in
general. In other words, given an input vector of ran-
domly generated length, they ask for the binary an-
swer to whether a specific symbol came before an-
other. This tests if the gradient can uphold for enough
recurrent steps so that the two bits of information can
be recognized. In contrast, given a random input vec-
tor of randomly generated length, we ask the networks
to reproduce the pth-last entry. We also considered
classic RNNs that do not possess gated memory vec-
tors.
Most recently Gonon et al. analysed the mem-
ory and forecasting capacities of linear and nonlin-
ear RNN (for independent and non-independent in-
puts). They stated an upper bound for both while
generalizing Jaegers statements regarding MC esti-
mates. (Gonon et al., 2020)
Additionally, Bengio et al. performed related ex-
periments to investigate the problem of vanishing and
exploding gradients. Furthermore, their findings ex-
plain how robust the transport of information is un-
der the influence of noisy and unrelated information.
However, they did not consider pure memorization
”by heart”. (Bengio et al., 1994)
As one might confuse the benchmark problems
in this paper with work on the topic of generaliza-
tion and over-fitting, we would like to point out, that
our targeted notion of capacity is very different. Al-
though unrelated in methodology (they used regular
fully connected feed-forward networks), Zhang et al.
provide an analysis quite similar in wording: They
consider a network’s capacity as the amount of input-
output pairs from the training set that can be exactly
reproduced by the network (after training) (Zhang
et al., 2016). This kind capacity is measured on a
whole data set of input vectors. We consider memory
capacity within a single call of a trained network for
a single input vector that is passed in piece by piece,
which is an entirely different setup.
Neural Turing Machines currently are a promis-
ing extension of classical NNs designed specifically
to offer more powerful operations to manage a hidden
state ((Graves et al., 2014)). We reckon that the Ran-
dom Memorization Task is trivial to them. The same
applies for neural networks architectures that involve
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
314

attention mechanism, like the very prominent Trans-
former (Vaswani et al., 2017).
6 CONCLUSION
We defined the Random Memorization Task for
RNNs. Despite it contradicting the intuition be-
hind the usage of recurrent neural networks, classical
RNNs, LSTM and GRU networks were able to mem-
orize a random input sequence to a certain extent,
depending on configuration and architecture. There
is a discernible borderline between past positions in
the sequence that could be memorized and those that
could not, which correlates with the MC formulated
by Jaeger. We therefor conclude, that Jaegers MC for-
mula is applicable for calculating the memory limit in
respect to the RNN’s type and architecture.
While our experiments are very limited in scale
(due to the already computationally expensive nature
of the experiments), we observe the trend that more
cells increase the memory limit. The limiting fac-
tor that we observed, at least for vanilla-RNN’s, is
the VEGP. However, it is important to note that for
current RNN applications the ratio of input sequence
length and cells inside the RNN is usually in favor
of the number of cells, so that we would not expect
the memory limit to play an important role in the ap-
plication of the typical RNN. Still, we hope this re-
search represents an additional step towards a theo-
retical framework concerned with the learnability of
problems using specific machine learning techniques.
REFERENCES
Bengio, Y., Simard, P., Frasconi, P., et al. (1994). Learning
long-term dependencies with gradient descent is diffi-
cult. IEEE transactions on neural networks, 5(2):157–
166.
Buonomano, D. V. and Merzenich, M. M. (1995). Tem-
poral information transformed into a spatial code by
a neural network with realistic properties. Science,
267(5200):1028–1030.
Cho, K., Van Merri
¨
enboer, B., Gulcehre, C., Bahdanau, D.,
Bougares, F., Schwenk, H., and Bengio, Y. (2014).
Learning phrase representations using RNN encoder-
decoder for statistical machine translation. arXiv
preprint arXiv:1406.1078.
Chung, J., Gulcehre, C., Cho, K., and Bengio, Y.
(2014). Empirical evaluation of gated recurrent neu-
ral networks on sequence modeling. arXiv preprint
arXiv:1412.3555.
Cleeremans, A., Servan-Schreiber, D., and McClelland,
J. L. (1989). Finite state automata and simple recur-
rent networks. Neural computation, 1(3):372–381.
Dey, R. and Salemt, F. M. (2017). Gate-variants of gated
recurrent unit (GRU) neural networks. In 2017 IEEE
60th International Midwest Symposium on Circuits
and Systems (MWSCAS), pages 1597–1600. IEEE.
Engelbrecht, A. P. (2007). Computational intelligence: an
introduction. John Wiley & Sons.
Gallicchio, C. and Micheli, A. (2017). Deep echo state
network (deepesn): A brief survey. arXiv preprint
arXiv:1712.04323.
Giles, C. L., Miller, C. B., Chen, D., Chen, H.-H., Sun,
G.-Z., and Lee, Y.-C. (1992). Learning and extract-
ing finite state automata with second-order recurrent
neural networks. Neural Computation, 4(3):393–405.
Gonon, L., Grigoryeva, L., and Ortega, J.-P. (2020). Mem-
ory and forecasting capacities of nonlinear recur-
rent networks. Physica D: Nonlinear Phenomena,
414:132721.
Graves, A., Wayne, G., and Danihelka, I. (2014). Neural
turing machines. arXiv preprint arXiv:1410.5401.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural Computation, 9(8):1735–1780.
Jaeger, H. (2001). The “echo state” approach to analysing
and training recurrent neural networks-with an erra-
tum note. Bonn, Germany: German National Re-
search Center for Information Technology GMD Tech-
nical Report, 148(34):13.
LeCun, Y., Bengio, Y., and Hinton, G. (2015). Deep learn-
ing. Nature, 521(7553):436.
Lu, Y. and Salem, F. M. (2017). Simplified gating in
long short-term memory (LSTM) recurrent neural
networks. In 2017 IEEE 60th International Mid-
west Symposium on Circuits and Systems (MWSCAS),
pages 1601–1604. IEEE.
Maass, W., Natschl
¨
ager, T., and Markram, H. (2002). Real-
time computing without stable states: A new frame-
work for neural computation based on perturbations.
Neural computation, 14(11):2531–2560.
Mayer, N. M. (2017). Echo state condition at the critical
point. Entropy, 19(1):3.
Rumelhart, D. E., Hinton, G. E., and Williams, R. J. (1986).
Learning representations by back-propagating errors.
nature, 323(6088):533.
Schmidhuber, J. (2015). Deep learning in neural networks:
An overview. Neural networks, 61:85–117.
Stanley, K. O. and Miikkulainen, R. (2002). Evolving neu-
ral networks through augmenting topologies. Evolu-
tionary computation, 10(2):99–127.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, L., and Polosukhin, I.
(2017). Attention is all you need. In NIPS.
Yildiz, I. B., Jaeger, H., and Kiebel, S. J. (2012). Re-visiting
the echo state property. Neural networks, 35:1–9.
Zhang, C., Bengio, S., Hardt, M., Recht, B., and Vinyals, O.
(2016). Understanding deep learning requires rethink-
ing generalization. arXiv preprint arXiv:1611.03530.
Empirical Analysis of Limits for Memory Distance in Recurrent Neural Networks
315
