A Queueing Analysis of Multi-type Servers and Multi-type Customers
System based on Gas Stations
Yoshito Machida
1
and Tuan Phung-Duc
2 a
1
Graduate School of Science and Technology, University of Tsukuba, Tsukuba, Ibaraki 305-8577, Japan
2
Faculty of Engineering, Information and Systems, University of Tsukuba, Tsukuba, Ibaraki 305-8577, Japan
Keywords:
Queueing Model, GI/M/1-type Markov Chain, Gas Station, Performance.
Abstract:
Nowadays, cars are essential to life, and most cars used in society need refueling. In gas stations, an odd
phenomenon often occurs where the server (refueling lane) is available, but the service is not available, and
this is due to the mismatch between the type of the customer (car) and the type of the server. In this paper,
we model some types of the system of gas stations as queueing models and analyze them. In addition, we
derive performance measures and compare these types of systems. Some counter-intuitive results emerge in
this study.
1 INTRODUCTION
Nowadays, many people worldwide use cars, and
transporting by cars is essential for their lives. There
are over 80 million cars in Japan, and over 60 million
are passenger vehicles (Ministry of Land, Infrastruc-
ture, Transport and Tourism, Japan, 2021). Recently,
zero-emission vehicles are developing, such as Elec-
tric Vehicles (EVs) and Fuel Cell Vehicles (FCVs),
but the number of such vehicles is still low. In Japan,
the number of EVs and FCVs is about 130 thousand
at the end of FY (Fiscal Year) 2019 (Next Genera-
tion Vehicle Promotion Center, Japan, 2020). Accord-
ingly, most cars on the streets are powered by engines
which need to be refueled. Generally, people refuel
cars at a Gas Station (GS), and some unusual phe-
nomena occur.
Typically, each refueling machine installed at a
GS has two servers (refueling lanes), and each lane
can provide refueling service independently. Here-
after, we refer the server to as a service lane in a re-
fueling machine. Most cars have a fuel door on either
the left or right side, so the two lanes are for cars with
a left-side fuel door and a right-side fuel door. In real-
ity, although many GSs have equal numbers of lanes
for left and lanes for right, the left-right ratio of fuel
door position is not always 1:1 (it varies by country
and region). For example, there are many more ve-
hicles with left-side fuel doors than those with right-
a
https://orcid.org/0000-0002-5002-4946
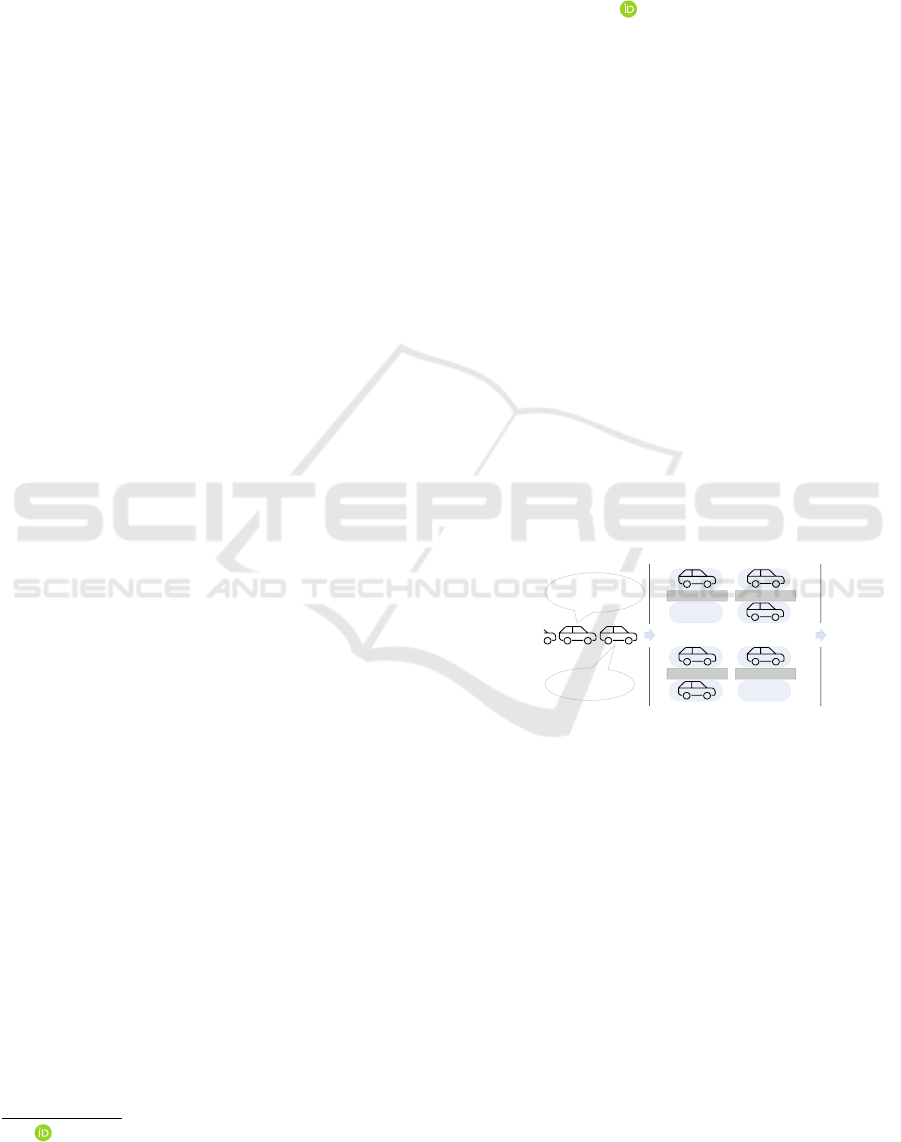
side ones in Japan. This can cause the blocking phe-
nomenon even when some servers in the system are
available like Figure 1. The disadvantages of this phe-
nomenon have been studied using a queueing model
(M
´
elange et al., 2011).
LR
Type
Mismatch
Blocked by
front vehicle
Machine
L
R
Machine
L
R
R
L
L
Machine
L
L
Machine
L
L
RR
R
Figure 1: Queueing phenomenon that often occurs in GS.
On the other hand, refueling machines with long
hoses can provide service regardless of the position of
the fuel door. Theoretically, the aforementioned phe-
nomenon cannot happen at GSs that install this type
of machine, so this type of machine is preferred in
terms of operational efficiency. However, it is diffi-
cult to replace all machines due to various constraints
such as costs or safety.
From these backgrounds, our research focuses
on analyzing the queueing system with multi-type
servers and multi-type customers like GSs. In this
research, we consider three types of GSs. In the first
type, all machines have a regular hose (dedicated use).
In the second type, all machines have a long hose
(shared use). Finally, a third type is a hybrid form
of the above two types. Then, we model them as
queueing systems and analyze the difference of per-
Machida, Y. and Phung-Duc, T.
A Queueing Analysis of Multi-type Servers and Multi-type Customers System based on Gas Stations.
DOI: 10.5220/0010816100003117
In Proceedings of the 11th International Conference on Operations Research and Enterprise Systems (ICORES 2022), pages 145-152
ISBN: 978-989-758-548-7; ISSN: 2184-4372
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
145
formances between each type of system.
The structure of this paper is organized as follows.
In Section 2, we explain the queueing models for
three types of GS systems. In Section 3, we present an
analysis of the proposed models in detail. In Section
4, we derive the stability conditions for some systems.
In Section 5, we introduce some performance mea-
sures. In Section 6, we show several numerical exam-
ples. Finally, in Section 7, we conclude this paper and
discuss future works.
2 QUEUEING MODELS
In this section, we model three types of GS systems
as queueing models. A GS may provide various ser-
vices, but here we assume that a GS provides only
refueling service. There are two types of servers in a
GS: dedicated server (regular hose) and shared server
(long hose). In this paper, we consider three types of
systems, i.e., All-Shared servers (AS), All-Dedicated
servers (AD), and Shared-and-Dedicated Mix (SDM).
In all models, customers whose cars are equipped
with a fuel door on the left side (type-L customer)
and right side (type-R customer) arrive at the system
according to Poisson processes with rates λ
L
and λ
R
.
Moreover, service times follow the exponential distri-
bution with a mean of 1/µ. After the service, the lane
becomes empty. In order to analyze models, we set
necessary assumptions. First, we assume that the ar-
rival intervals of customers and the service times of
each server are independent of each other. Second,
the order of services is assumed to be FCFS.
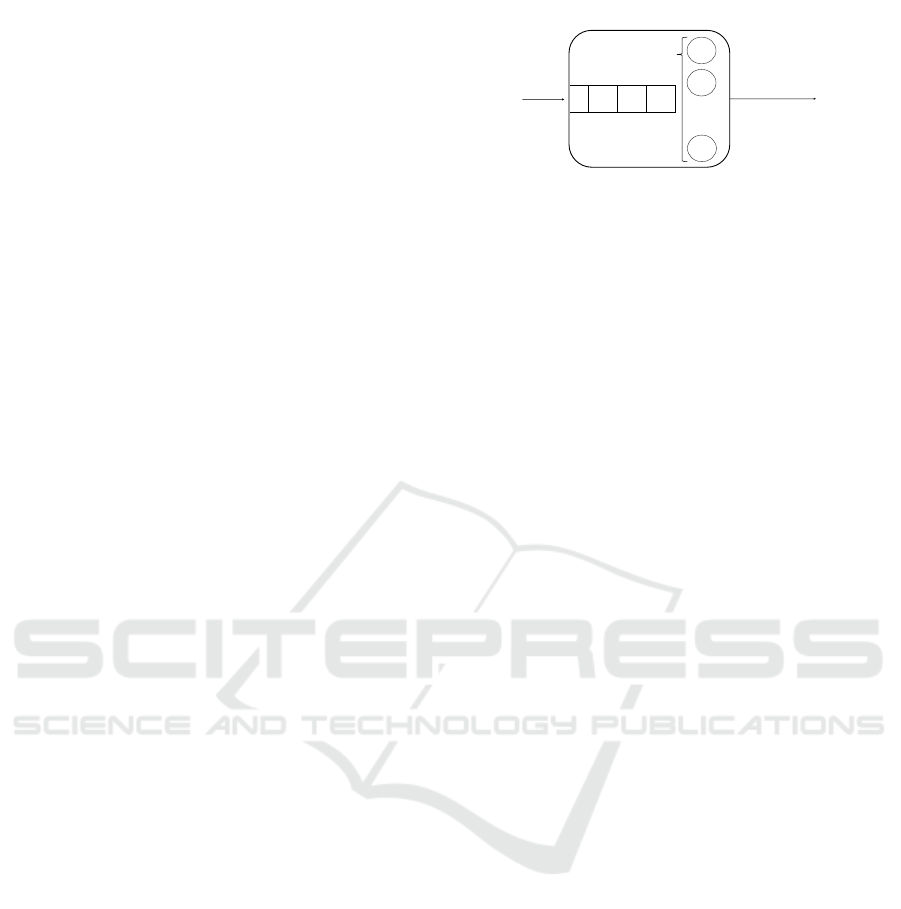
2.1 All-Shared Servers System (AS)
First of all, we describe a queueing model of a GS
that adopts an AS system. AS means that all servers
in the system can provide service for all customers,
so all customers are indiscriminate in this type of sys-
tem. There is no need to distinguish between different
types of customers in this system, so the arrivals of ar-
bitrary customers (type-L or type-R) follow a Poisson
process with rate λ (= λ
L
+λ
R
). The schematic of the
model is shown in Figure 2.
If the number of servers is c, a GS that adopts
the AS system can be modeled as an M/M/c queue-
ing system.
𝜆
(𝜆
𝐿
+ 𝜆
𝑅
)
・
・
・
𝜇
𝑐
𝜇
𝜇
Figure 2: The queueing model of AS system GS.
2.2 All-Dedicated Servers System (AD)
Next, we describe a queueing model of a GS that
adopts an AD system. In the AD system, all servers
are either for type-L customers or for type-R cus-
tomers. Thus, this system has two types depending
on how customers line up, queue-divided type and
queue-combined type.
2.2.1 Queue-divided AD System (AD-D)
In this system, customers search for the server that
matches the position of the fuel door on their car and
start getting service. In the AD-D type, if no server is
available, customers line up separately for each type
of their fuel door side. It means that there are two ad-
jacent independent systems. One contains all servers
serving type-L customers, and the other contains all
servers serving type-R customers and each system be-
haves like an AS system.
If the numbers of servers in each system are c
L
and
c
R
(c
L
+ c
R
= c), a GS that adopts the AD-D system
can be modeled as two separate M/M/c
L
and M/M/c
R
queueing systems.
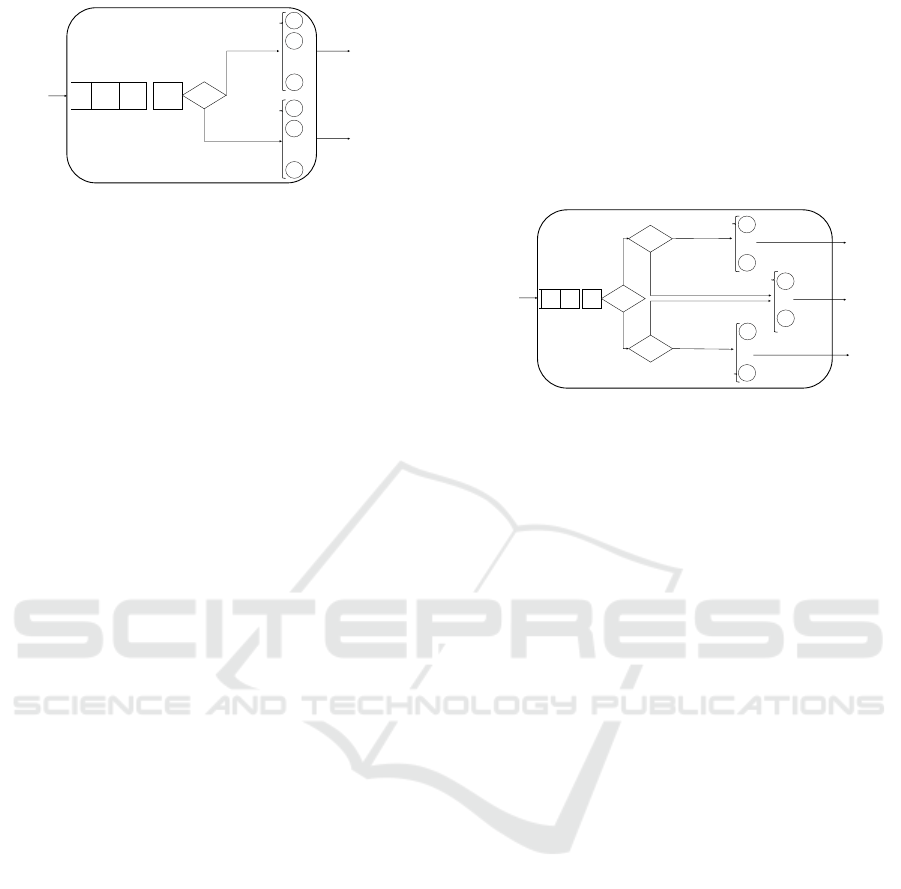
2.2.2 Queue-combined AD System (AD-C)
Then what if all customers line up together in one
queue? In this type of system, we can observe two
curious phenomena. First, in this type of system, with
customers in the queue, the server that does not match
the customer in the queue head may remain empty and
unused even if the customer behind the head matches
it. Second, from the situation mentioned above, when
the server that matches the customer at the head of
the queue becomes empty, customers behind the head
of the queue might enter the servers simultaneously.
In other words, more than two customers might enter
the servers simultaneously in this type of system. In
this type of system, customers arrive at the system ac-
cording to a Poisson process with rate λ (= λ
L
+ λ
R
),
and the probabilities that a type-L or type-R cus-
tomer is at the head of the queue are λ
0
L
(= λ
L
/λ)
and λ
0
R
(= λ
R
/λ), respectively. The schematic of this
model is shown in Figure 3.
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
146
・
・
・
𝜇
𝑐
𝑅
・
・
・
𝜇
𝑐
𝐿
𝜆
Type-L
Head
type?
Type-R
L or R
𝜇
𝜇
𝜇
𝜇
Figure 3: The queueing model of AD-C system GS.
In order to analyze this model, we provide the
necessary settings. The numbers of type-L, type-R
servers are c
L
, c
R
(c
L
+ c
R
= c). We define N
0
:=
N ∪{0}, S
L
:= {0,1,...,c
L
}, S
R
:= {0,1,...,c
R
} (c
L
+
c
R
= c), S
H
:= {0,1}, S
∗
D
:= S
L
× S
R
× S
H
× N
0
. Let
C
L
(t) and C
R
(t) respectively denote the numbers of
cars staying in type-L and type-R servers in the sys-
tem at time t, where C
L
(t) ∈ S
L
, C
R
(t) ∈ S
R
. The
type of the fuel door of the customer at the head
of the queue at time t is H(t) ∈ S
H
. Denote by
L(t) the number of customers in the queue at time
t, where L(t) ∈ N
0
. After all, we define X
D
(t) :=
(L(t), C
L
(t), C
R
(t), H(t)). Since S
∗
D
includes states
that X
D
(t) cannot reach, we define S
D
as the subset of
S
∗
D
that excludes unreachable states. In this way, we
can see {X
D
(t); t ≥ 0} is an irreducible Markov chain
on the state space S
D
. Based on the above settings, we
analyze this model in Section 3.
2.3 Shared-and-Dedicated-Mix System
(SDM)
Finally, we describe a queueing model of a GS that
adopts the SDM system. SDM means that some
servers in the system are shared, and the others are
dedicated. There is a study on the system of this
mechanism modeled as a loss system for the type that
uses a dedicated server first (D-first) (Kawashima,
1985). We consider two types of this system about
priority disciplines for server usage: D-first and
shared server first (S-first).
In order to analyze these models, we provide the
necessary settings. The numbers of type-L, type-
R, shared servers are c
L
, c
R
, c
S
(c
L
+ c
R
+ c
S
= c).
We define N
0
:= N ∪ {0}, S
L
:= {0, 1, ..., c
L
}, S
R
:=
{0,1,...,c
R
}, S
S
:= {0, 1, ..., c
S
} (c
L
+ c
R
+ c
S
=
c), S
H
:= {0,1}, S
∗
M
:= S
L
× S
R
× S
S
× S
H
× N
0
. Let
C
L
(t), C
R
(t) and C
S
(t) respectively denote the num-
bers of cars staying in type-L, type-R and shared
servers in the system at time t, where C
L
(t) ∈
S
L
, C
R
(t) ∈ S
R
, C
S
(t) ∈ S
S
. The type of the fuel door
of the customer at the head of the queue at time t is
H(t) ∈ S
H
. Denote by L(t) the number of customers
in the queue at time t, where L(t) ∈ N
0
. After all,
we define X
M
(t) := (L(t), C
L
(t), C
R
(t), C
S
(t), H(t)).
Since S
∗
M
includes states that X
M
(t) cannot reach, we
define S
M
as the subset of S
∗
M
that excludes unreach-
able states. In this way, we can see {X
M
(t); t ≥ 0}
is an irreducible Markov chain on the state space S
M
.
Based on the above settings, we analyze this model in
later sections. The difference between the two types
of this system is mentioned in in Section 3.
・
・
・
𝜇
𝑐
𝑅
・
・
・
𝜇
𝑐
𝐿
𝜆
Type-L
Head
type?
Type-R
L or R
S-first
・
・
・
𝜇
𝑐
𝑆
D-first
D-first
S-first
𝜇
𝜇
𝜇
Priority
law?
Priority
law?
Figure 4: The queueing model of SDM system GS.
3 QUEUEING ANALYSIS
In this section, we define the infinitesimal generators
for the two models mentioned above: the AD-C sys-
tem and the SDM system, and describe the analysis
of these models. For the other models, the solution
method already exists so that we will derive the per-
formance measures in the later section.
3.1 AD-C System
We construct the transition matrix by separating the
change in the number of customers in the queue.
Then, we represent the infinitesimal generator Q
D
in
(1), where O is a zero matrix of appropriate size.
Q
D
=
L
D
0
L
D
1
L
D
2
L
D
3
··· L
D
l
L
D
l+1
···
L
D
0
B
0
C
0
O O · ·· O O · · ·
L
D
1
B
1
A
1
A
0
O · ·· O O · · ·
L
D
2
B
2
A
2
A
1
A
0
··· O O ···
L
D
3
B
3
A
3
A
2
A
1
··· O O ···
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
L
D
l
B
l
A
l
A
l−1
A
l−2
··· A
1
A
0
···
L
D
l+1
O A
l+1
A
l
A
l−1
··· A
2
A
1
···
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
(1)
In Q
D
, l represents the number of type-L and type-
R servers, whichever is greater, plus one. L
D
0
,L
D
k
(k ≥
1) are the sets given as follows.
L
D
0
:={(0,0,0)} ∪ {(0, 0,1)} ∪ ... ∪ {(0, 0, c
R
)} ∪{(0, 1, 0)}
∪ ...∪ {(0,c
L
,c
R
)}.
L
D
k
:={(k, 0, 0, 0)}∪ {(k, 0, 0,1)} ∪ {(k, 0, 1,0)} ∪ ... ∪{(k,0,c
R
,1)}
∪ {(k,1,0,0)} ∪ ...∪ {(k,c
L
,c
R
,1)}.
A Queueing Analysis of Multi-type Servers and Multi-type Customers System based on Gas Stations
147

In L
D
k
, k corresponds to the number of customers
in the queue. Therefore, the block matrices B
0
and
A
1
represent the state transition when the number of
customers in the queue does not change. The block
matrices C
0
and A
0
represent the state transition when
the number of customers in the queue increases by
one. A
k
(2 ≤ k ≤ l + 1) represents the state transition
when the number of customers in the queue decreases
by k − 1. Finally, the block matrix B
k
(1 ≤ k ≤ l) rep-
resents the state transition when the number of cus-
tomers in the queue decreases from k to zero. For the
elements of each matrix, please refer to the Appendix.
Next, we compute the stationary distribution of
(1). Because {X
D
(t) ∈ S
D
; t ≥ 0} defined in the pre-
vious section is a continuous-time Markov chain of
GI/M/1-type, we calculate the stationary distribution
by referring to the method shown in (Adan et al.,
2017). We define the stationary distribution π
D
i, j,k,l
of
X
D
(t) for (i, j, k,l) ∈ S
D
as follows.
π
D
i, j,k,l
= lim
t→∞
P(L(t) = i, C
L
(t) = j, C
R
(t) = k, H(t) = l),
π
D
0, j,k
= lim
t→∞
P(L(t) = 0, C
L
(t) = j, C
R
(t) = k).
3.2 SDM System
We consider two priorities in this type of system: D-
first and S-first, but these only make a difference in
B
0
. The differences in B
0
in consideration of the tran-
sition matrix. The differences are explained in the Ap-
pendix. Finally, we represent the infinitesimal genera-
tor Q
M
in (2), where O is a zero matrix of appropriate
size.
Q
M
=
L
M
0
L
M
1
L
M
2
L
M
3
··· L
M
l
L
M
l+1
···
L
M
0
B
0
C
0
O O · ·· O O ·· ·
L
M
1
B
1
A
1
A
0
O · ·· O O ·· ·
L
M
2
B
2
A
2
A
1
A
0
··· O O · ··
L
M
3
B
3
A
3
A
2
A
1
··· O O · ··
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
L
M
l
B
l
A
l
A
l−1
A
l−2
··· A
1
A
0
···
L
M
l+1
O A
l+1
A
l
A
l−1
··· A
2
A
1
···
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
(2)
In Q
M
, l represents the same meaning as in Q
D
.
L
M
0
, L
M
k
(k ≥ 1) are the sets given as follows.
L
M
0
:={(0,0,0, 0)} ∪ {(0,0,0,1)} ∪ ... ∪ {(0,0,0,c
S
)} ∪{(0, 0, 1, 0)}
∪ ...∪ {(0,0,c
R
,c
S
)} ∪{(0, 1, 0, 0)}∪ ... ∪{(0, c
L
,c
R
,c
S
)}.
L
M
k
:={(k, 0, 0, 0,0)} ∪ {(k, 0,0,0,1)} ∪{(k,0,0,1, 0)}
∪ ...∪ {(k,0, 0, c
S
,1)} ∪ {(k,0,1, 0, 0)} ∪ ... ∪ {(k, c
L
,c
R
,c
S
,1)}.
What each block of the transition matrix repre-
sents is the same as in the case of Q
D
. Please refer
to the Appendix for details.
Next, we compute the stationary distribution of
(2). Because {X
M
(t) ∈ S
M
; t ≥ 0} defined in the
previous section is a continuous-time Markov chain
of GI/M/1-type, we calculate the stationary distribu-
tion by referring to the method shown in (Adan et al.,
2017). We define the stationary distribution π
M
i, j,k,l,m
of X
M
(t) for (i, j, k,l, m) ∈ S
M
as follows.
π
M
i, j,k,l,m
= lim
t→∞
P(L(t) = i, C
L
(t) = j, C
R
(t) = k, C
S
(t) = l, H(t) = m),
π
M
0, j,k,l
= lim
t→∞
P(L(t) = 0, C
L
(t) = j, C
R
(t) = k, C
S
(t) = l).
4 PERFORMANCE MEASURES
This paper mainly uses the average number of cus-
tomers for each system as a performance measure.
A simple solution has already been shown for
M/M/c type queueing systems. The average numbers
of customers in the AS and AD-D systems are derived
based on (Adan et al., 2017).
The average number of customers in the AD-C
system E
D
(L) can be derived as follows.
E
D
(L) =
c
L
∑
j=0
c
R
∑
k=0
( j + k)π
D
0, j,k
+
∞
∑
i=0
c
L
∑
j=0
c
R
∑
k=0
1
∑
l=0
(i + j + k)π
D
i, j,k,l
.
The average number of customers in the SDM sys-
tem E
M
(L) can be derived as follows.
E
M
(L) =
c
L
∑
j=0
c
R
∑
k=0
c
S
∑
l=0
( j + k + l)π
M
0, j,k,l
+
∞
∑
i=0
c
L
∑
j=0
c
R
∑
k=0
c
S
∑
l=0
1
∑
m=0
(i + j + k + l)π
M
i, j,k,l,m
.
5 NUMERICAL RESULTS
In this section, we present some numerical results
based on the analysis of previous sections. Then, for
all models except AS and AD-D systems, we perform
Monte Carlo simulations to ensure the accuracy of the
numerical results.
5.1 AS, AD-D and AD-C Systems
First of all, we present differences between AS, AD-
D, and AD-C systems. We calculate the average num-
ber of customers in these systems by varying the ar-
rival rate λ and the arrival ratio of type-L to type-R.
The service rate µ is fixed at 40, the number of servers
c is fixed at 8, and the numbers of L and R servers are
the same. The result is shown in Figure 5.
There are some points of interest in this result.
First, in the same arrival rate of the type-L and
type-R, the AS system has the highest performance,
followed by the AD-D system, and the AD-C system
has a considerable performance difference from the
two systems mentioned above. The performance dif-
ference is caused by the blocking phenomenon in the
AD-D system when there are available servers, which
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
148
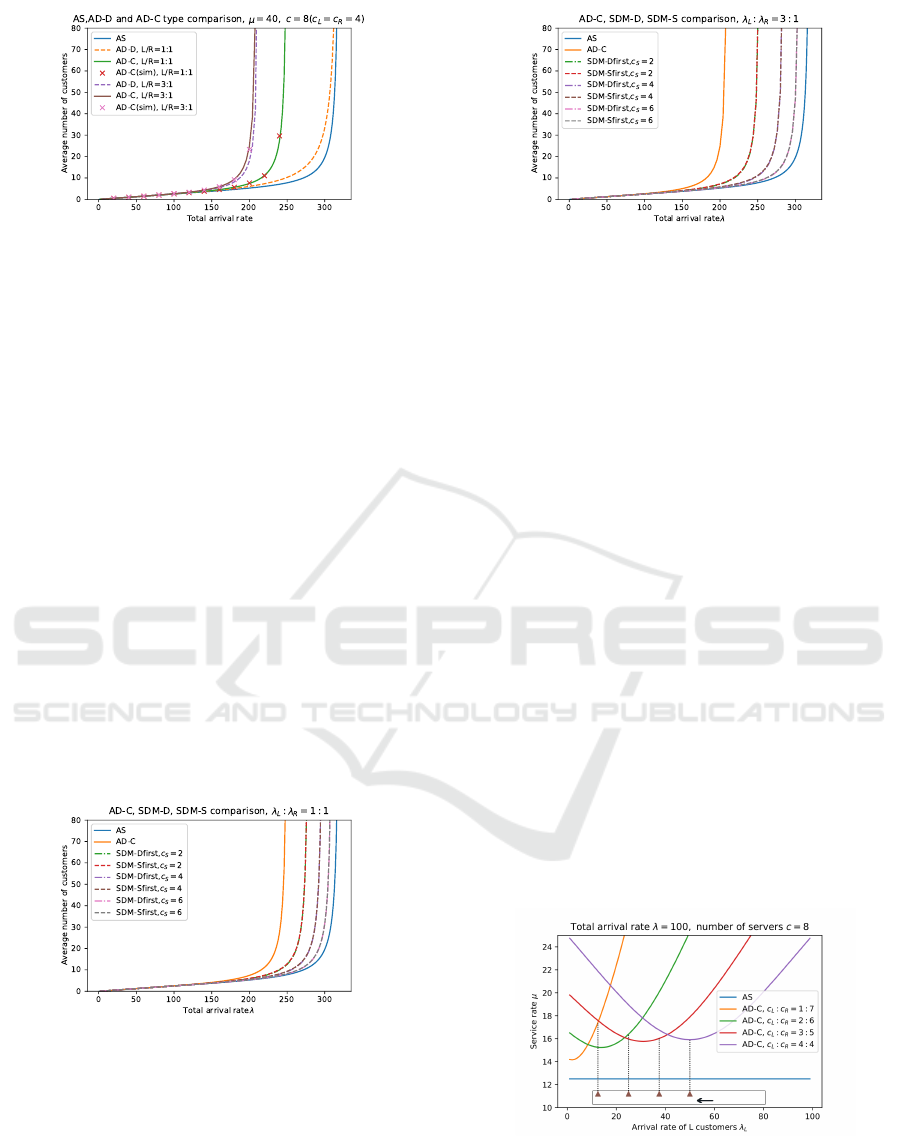
Figure 5: Comparison of AS, AD-D, AD-C systems.
does not occur in the AS system. In the AD-C system,
which has a single standby queue, the phenomenon is
observed more frequently, further degrading the per-
formance of the system.
Second, if there is a significant bias in the ar-
rival ratio of type-L to type-R, the performance dif-
ference between AD-D and AD-C becomes smaller.
The more significant bias in the arrival ratio of type-L
to type-R, the more the two systems will approximate
a system where only one type of server is used on each
side.
5.2 AD-C and SDM Systems
Next, we present differences between AD-C and two
types of SDM systems. We are interested in the effect
of the number of shared servers c
S
in two types of
SDM systems. We calculate these systems by varying
λ and c
S
. The service rate µ and the number of servers
in the system c are the same as the comparison in Sec-
tion 5.1. The results are shown in Figure 6 and Figure
7.
Figure 6: Comparison of AD-C system and SDM systems
without bias of arrival rate.
We observe two interesting points in the results.
First, according to Figure 5, Figure 6 and Figure 7,
the performance of the SDM system is in the middle
between the AD-C system and the AS system, and
each additional shared server leads to an ever-smaller
improvement of the performance of the SDM system.
Second, in the two types of SDM systems, there is not
much difference in performance between SDM-Dfirst
Figure 7: Comparison of AD-C system and SDM systems
with the large bias of arrival rate.
and SDM-Sfirst, and in situations where the system
is approaching instability, there is little difference be-
tween the two types of systems. Furthermore, there is
little difference between the two types of SDM sys-
tems, whether the shared server with higher utility is
used first or the dedicated server is used first in situ-
ations with no customer in the queue. Since the two
types of systems are considered precisely the same
when there is a queue of customers, our model, which
allows for an infinite buffer, does not show a signif-
icant difference, especially when the number of cus-
tomers in the queue is likely to increase. If this system
is changed to the loss system with no customer in the
queue or has a much larger number of servers, the dif-
ferences between the two types of systems are likely
to arise clearly.
5.3 Comparison in Stability Conditions
of AD-C System
At last, we present a comparison of the stability con-
ditions of the AD-C system varying the L-R ratio of
the number of servers. We calculate the stability con-
ditions of the AD-C system. In the experiment, we
set λ = 100, c = 8 and let the arrival rate of type-L
customers vary. The results are shown in Figure 8.
1:7
L-R arrival ratio
2:6
3:5
4:4
Figure 8: Comparison of L-R server ratio about AD-C sys-
tem.
There are two notable points in the results.
First, the greater the bias of the L-R ratio of the
number of servers, the smaller the minimum service
A Queueing Analysis of Multi-type Servers and Multi-type Customers System based on Gas Stations
149

rate required for system stability. In other words, the
more biased the L-R ratio of the number of servers is,
the system can be operated with less service capacity
when the arrival left-right ratio is optimal. This occurs
for the same reason as in the previous result: the more
significant bias the L-R server ratio and arrival ratio
of type-L to type-R are, the more the system behaves
like a smaller AS system, hence this result.
Second, intuitively, it seems to be most efficient
for the system when the L-R ratio of the number of
servers and arrival ratio of type-L to type-R is the
same. However, the result is often not so. In Figure
8, the lower markers represent the values at which the
arrival ratios of type-L to type-R are the same as each
server L-R ratio. The greater the bias in the server L-R
ratio, the greater the difference between the most ef-
ficient arrival ratio of type-L to type-R and the server
L-R ratio. It is thought to be caused for the risk of
the minor-type customers at the head of the queue.
The larger the bias in the server L-R ratio, the more
likely it is that when a minor-type customer lines up
at the head of the queue, many major-type customers
will line up behind. In order to avoid this waste, it is
thought to be desirable that the arrival ratio of type-L
to type-R is larger bias than the server L-R ratio, and
in such a situation, major-type customers are more
likely to be at the head of the queue, making it dif-
ficult for the aforementioned risk to occur.
6 CONCLUSION
We have modeled the systems with multi-type servers
and multi-type customers based on gas stations by
queueing systems. In this paper, we have evaluated
some differences among the systems. First, we com-
pared an AS system and the two types of AD sys-
tems. Second, we observed the impact of the number
of shared servers in the two types of SDM systems.
Third, we considered the effect of servers and arrival
left-right ratio in the AD-C system.
Finally, we consider the future works. In this
study, we have modeled the systems of gas stations
in simplified situations. However, in reality, the gas
station systems have much more complexity, so one
may consider incorporating more complex and real-
istic situations. First, for example, some customers
can get service from all types of servers, like motor-
cycles. Second, in the point of view about queue cre-
ation, there exists a system that is neither AD-D nor
AD-C, where customers are divided by their type in
the middle of the queue. Studies of similar systems
exist (M
´
elange et al., 2020), but there is no mention of
multiple servers’ cases. Second, due to the small size
of the gas station site, there are incidents where cus-
tomers cannot leave after the service and customers in
the queue cannot enter the available servers. This phe-
nomenon has already been studied earlier (Teimoury
et al., 2011; Jiang, 2018), but their models are single-
row services, which are more straightforward than the
actual GS multi-row service. In addition, there are
various kinds of factors that seem to affect a gas sta-
tion system. For example, customers also enter the
system for other services such as car washing, then
join the queue for fueling afterward. In this case,
the new system may be modeled as a tandem queue
where multiple types of services are available, and
more variables need to be added to capture such com-
plexity.
ACKNOWLEDGEMENTS
The research of the second author is supported in part
by JSPS KAKENHI Grant Number 21K11765.
REFERENCES
Adan, I., van Leeuwaarden, J., and Selen, J. (2017). Anal-
ysis of structured markov processes. arXiv preprint
arXiv:1709.09060.
Jiang, T. (2018). Analysis of a tollbooth tandem queue
with two-class customers and two heterogeneous ded-
icated servers. Asia-Pacific Journal of Operational
Research, 35(06):1850043.
Kawashima, K. (1985). An approximation of a loss sys-
tem with two heterogeneous types of calls. Journal of
the Operations Research Society of Japan, 28(2):163–
177.
M
´
elange, W., Bruneel, H., Steyaert, B., and Walraevens,
J. (2011). A two-class continuous-time queueing
model with dedicated servers and global fcfs service
discipline. In International Conference on Analyti-
cal and Stochastic Modeling Techniques and Applica-
tions, pages 14–27. Springer.
M
´
elange, W., Walraevens, J., and Bruneel, H. (2020).
Performance analysis of a continuous-time two-class
global first-come-first-served queue with two servers
and presorting. Annals of Operations Research.
Ministry of Land, Infrastructure, Transport and Tourism,
Japan (2021). Statistics on the number of vehi-
cles owned. https://www.mlit.go.jp/statistics/details/
jidosha list.html. Accessed : 2021-09-05.
Next Generation Vehicle Promotion Center, Japan (2020).
Statistics on the number of evs and like vehicles
owned. http://www.cev-pc.or.jp/tokei/hanbai.html.
Accessed : 2021-09-05.
Teimoury, E., Yazdi, M. M., Haddadi, M., and Fathi,
M. (2011). Modelling and improvement of non-
standard queuing systems: a gas station case study.
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
150
International Journal of Applied Decision Sciences,
4(4):324–340.
APPENDIX
We describe each of the block matrices used in the
infinitesimal generators defined in Section 3. In the
following, the element in the i−th row from the top
and j−th column from the left of a block matrix is
called the (i, j) element. For instance, the (i, j) ele-
ment of a block matrix A is denoted as A
i, j
. Note that
the matrix components of the undefined part in each
block matrix are all zero.
First, we describe each of the block matrices used
in the infinitesimal generator about the AD-C system.
A
0
is a ((c
L
+ 1) × (c
R
+ 1) × 2)-order square ma-
trix that represents the transition of the number of cus-
tomers in the queue from i to i + 1 (i ≥ 1). Thus, each
element (A
0
)
i, j
is defined as follows.
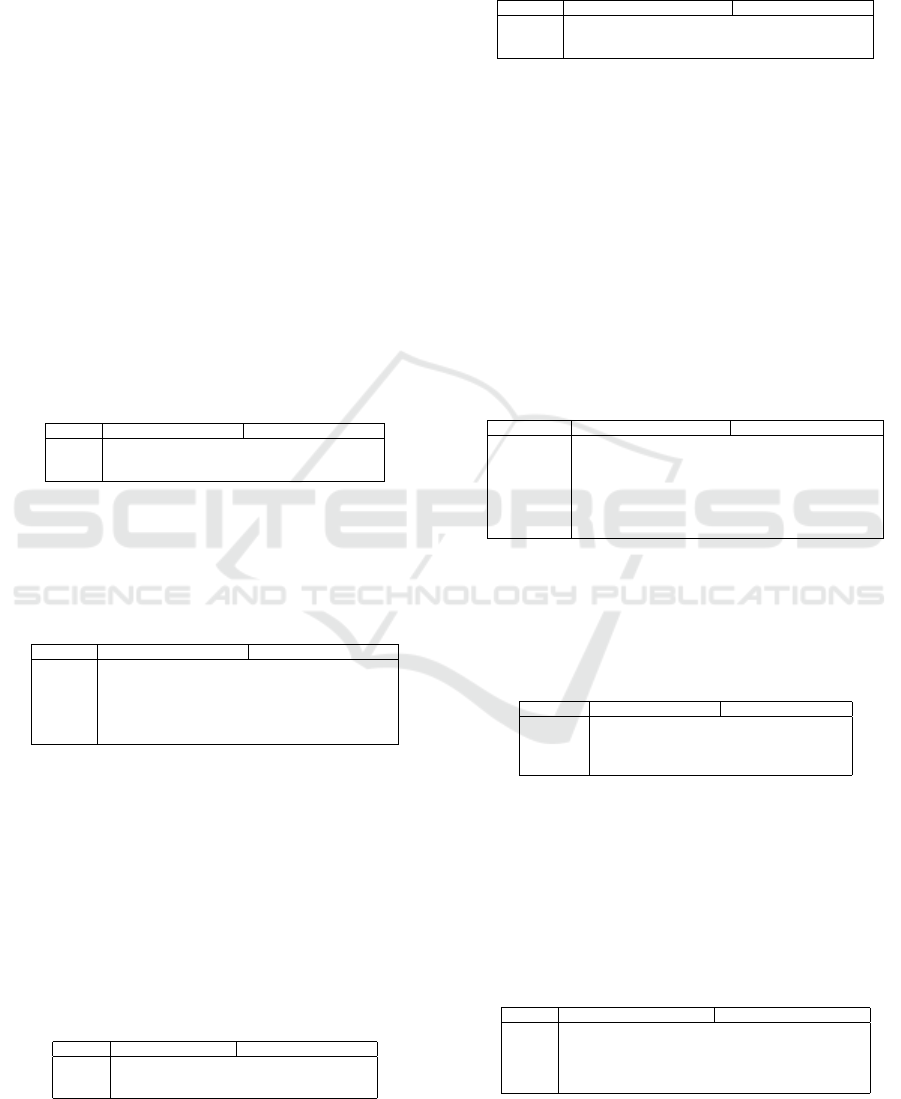
Table 1: Matrix components of A
0
.
(A
0
)
i, j
i j
λ (m + 1) × (c
R
+ 1) × 2 (m + 1) × (c
R
+ 1) × 2
λ (c
L
(c
R
+ 1) + n) × 2 +1 (c
L
(c
R
+ 1) + n) × 2 +1
if (0 ≤ m ≤ c
L
, 0 ≤ n ≤ c
R
)
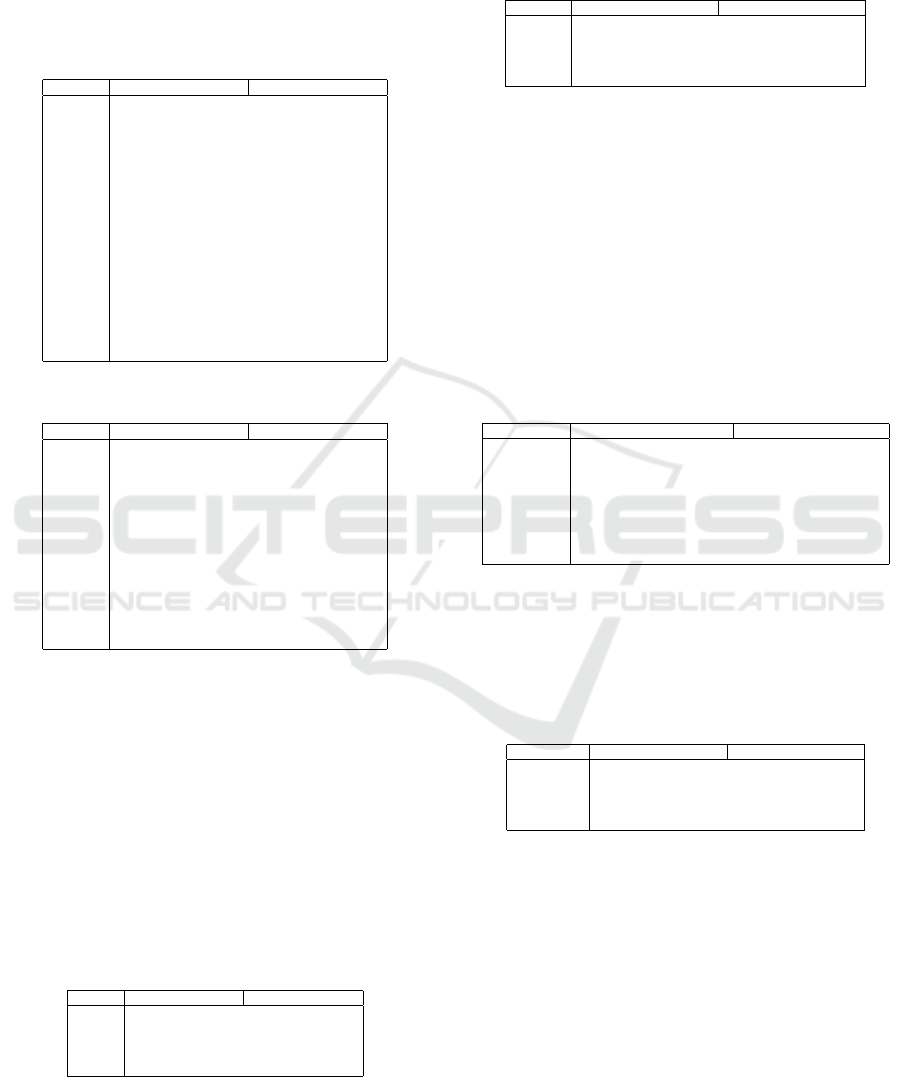
B
0
is a ((c
L
+ 1) × (c
R
+ 1))-order square matrix
that represents the transition of states when the num-
ber of customers in the queue is zero. Each element
(B
0
)
i, j
is defined as follows.
Table 2: Matrix components of B
0
.
(B
0
)
i, j
i j
λ
L
(c
R
+ 1) × m + n + 1 (c
R
+ 1) × (m + 1) +n + 1
(m + 1)µ (c
R
+ 1) × (m + 1) +n + 1 (c
R
+ 1) × m + n + 1
if (0 ≤ m ≤ c
L
− 1, 0 ≤ n ≤ c
R
)
λ
R
(c
R
+ 1) × m + n + 1 (c
R
+ 1) × m + n + 2
(n + 1)µ (c
R
+ 1) × m + n + 2 (c
R
+ 1) × m + n + 1
if (0 ≤ m ≤ c
L
, 0 ≤ n ≤ c
R
)
Denoting I := {1,2,...,(c
L
+ 1) × (c
R
+ 1)}, J :=
{1,2,...,(c
L
+ 1)× (c
R
+ 1)× 2}, i ∈ I, we define the
diagonal components of B
0
as follows.
(B
0
)
i,i
= −
∑
j∈I\{i}
(B
0
)
i, j
+
∑
j∈J
(C
0
)
i, j
!
.
C
0
is a matrix of size ((c
L
+1)×(c
R
+1))×((c
L
+
1) × (c
R
+ 1) × 2) that represents the transition of the
number of customers in the queue from zero to 1.
Each element (C
0
)
i, j
is defined as follows.
Table 3: Matrix components of C
0
.
(C
0
)
i, j
i j
λ
L
c
L
× (c
R
+ 1) + n + 1 (c
L
(c
R
+ 1) + n) × 2 + 1
λ
R
(m + 1) × (c
R
+ 1) (m + 1) × (c
R
+ 1) × 2
if ( 0 ≤ m ≤ c
L
, 0 ≤ n ≤ c
R
)
A
1
is a ((c
L
+ 1) × (c
R
+ 1) × 2)-order square ma-
trix that represents the transition of states when the
number of customers in the queue is greater than or
equal to 1. Each element(A
1
)
i, j
is defined as follows.
Table 4: Matrix components of A
1
.
(A
1
)
i, j
i j
(m + 1)µ (m + 2) × (c
R
+ 1) × 2 (m + 1) × (c
R
+ 1) × 2
(n + 1)µ (c
L
(c
R
+ 1) + (n + 1)) ×2 + 1 (c
L
(c
R
+ 1) + n) × 2 + 1
if ( 0 ≤ m ≤ c
L
− 1, 0 ≤ n ≤ c
R
− 1)
We define the diagonal components of A
1
when
the number of customers in the queue is l as follows.
(A
1
)
i,i
= −
∑
j∈I
(B
l
)
i, j
+
l
∑
k=2
∑
j∈J
(A
k
)
i, j
+
∑
j∈I\{i}
(A
1
)
i, j
+
∑
j∈J
(A
0
)
i, j
!
.
A
k
(k ≥ 2) is a ((c
L
+ 1) × (c
R
+ 1) × 2)-order
square matrix that represents the transition that the
number of customers in the queue decreases by k − 1
but not to zero. Note that the probability that a cus-
tomer in the queue is type-L is λ
L
/λ (:= λ
0
L
) and the
probability that a customer in the queue is type-R is
λ
R
/λ (:= λ
0
R
). Each element (A
k
)
i, j
is defined as fol-
lows.
Table 5: Matrix components of A
k
.
(A
k
)
i, j
i j
c
L
µλ
0
L
λ
0k−2
R
(c
L
(c
R
+ 1) + (n + 1))
×2 − 1
(c
L
(c
R
+ 1) + (k + n − 1))
×2 − 1
c
L
µλ
0k−1
R
((c
L
+ 1)(c
R
+ 1) + (2 − k))
×2 − 1
(c
L
+ 1) × (c
R
+ 1) × 2
c
R
µλ
0
R
λ
0k−2
L
(m + 1) × (c
R
+ 1) × 2 (k +m − 1)× (c
R
+ 1) × 2
c
R
µλ
0k−1
L
(c
L
− k + 3) × (c
R
+ 1) × 2 (c
L
+ 1) × (c
R
+ 1) × 2 − 1
if ( 0 ≤ m ≤ c
L
+ 2 − k, 0 ≤ n ≤ c
R
+ 2 − k)
B
k
(k ≥ 1) is a matrix of size ((c
L
+1)×(c
R
+1)×
2)×((c
L
+1)×(c
R
+1)) that represents the transition
of the number of customers in the queue from k to
zero. Each element (B
k
)
i, j
is defined as follows.
Table 6: Matrix components of B
k
.
(B
k
)
i, j
i j
c
L
µλ
0k−1
R
(c
L
(c
R
+ 1) + (n + 1))
×2 − 1
c
L
(c
R
+ 1) + n + k − 1
c
R
µλ
0k−1
L
(m + 1) × (c
R
+ 1) × 2 (m + k)(c
R
+ 1)
if ( 0 ≤ m ≤ c
L
+ 1 − k, 0 ≤ n ≤ c
R
+ 1 − k)
Second, we describe each block matrices used in
the infinitesimal generator about two types of SDM
systems.
A
0
is a ((c
L
+ 1) × (c
R
+ 1) × (c
S
+ 1) × 2)-order
square matrix that represents the transition of the
number of customers in the queue from i to i + 1 (i ≥
1). Each element (A
0
)
i, j
is defined as follows.
Table 7: Matrix components of A
0
.
(A
0
)
i, j
i j
λ
(m + 1) × (c
R
+ 1)
×(c
S
+ 1) × 2
(m + 1) × (c
R
+ 1)
×(c
S
+ 1) × 2
λ
(c
L
(c
R
+ 1) + n) × (c
S
+ 1)
×2 + 1
(c
L
(c
R
+ 1) + n) × (c
S
+ 1)
×2 + 1
if (0 ≤ m ≤ c
L
, 0 ≤ n ≤ c
R
)
B
0
is a ((c
L
+ 1) × (c
R
+ 1) × (c
S
+ 1))-order
square matrix that represents the transition of states
A Queueing Analysis of Multi-type Servers and Multi-type Customers System based on Gas Stations
151
when the number of customers in the queue is zero.
There are two types in the SDM system. The only
difference between the two types is the components
of B
0
. Each element of B
0
of D-first (B
D
0
)
i, j
and S-
first (B
S
0
)
i, j
are defined as follows.
Table 8: Matrix components of B
D
0
.
(B
D
0
)
i, j
i j
λ
L
(l × (c
R
+ 1) + m)
×(c
S
+ 1) + n + 1
((l + 1) ×(c
R
+ 1) + m)
×(c
S
+ 1) + n + 1
(l + 1)µ
((l + 1) ×(c
R
+ 1) + m)
×(c
S
+ 1) + n + 1
(l × (c
R
+ 1) + m)
×(c
S
+ 1) + n + 1
if (0 ≤ m ≤ c
L
− 1, 0 ≤ n ≤ c
R
, 0 ≤ n ≤ c
S
)
λ
R
(l × (c
R
+ 1) + m)
×(c
S
+ 1) + n + 1
(l × (c
R
+ 1) + m + 1)
×(c
S
+ 1) + n + 1
(m + 1)µ
(l × (c
R
+ 1) + m + 1)
×(c
S
+ 1) + n + 1
(l × (c
R
+ 1) + m)
×(c
S
+ 1) + n + 1
if (0 ≤ m ≤ c
L
, 0 ≤ n ≤ c
R
− 1, 0 ≤ n ≤ c
S
)
λ
L
(c
L
× (c
R
+ 1) + m)
×(c
S
+ 1) + n + 1
(c
L
× (c
R
+ 1) + m)
×(c
S
+ 1) + n + 2
λ
R
(l × (c
R
+ 1) + c
R
)
×(c
S
+ 1) + n + 1
(l × (c
R
+ 1) + c
R
)
×(c
S
+ 1) + n + 2
λ
(c
L
× (c
R
+ 1) + c
R
)
×(c
S
+ 1) + n + 1
(c
L
× (c
R
+ 1) + c
R
)
×(c
S
+ 1) + n + 2
(n + 1)µ
(l × (c
R
+ 1) + m)
×(c
S
+ 1) + n + 2
(l × (c
R
+ 1) + m)
×(c
S
+ 1) + n + 1
if (0 ≤ m ≤ c
L
, 0 ≤ n ≤ c
R
, 0 ≤ n ≤ c
S
− 1)
Table 9: Matrix components of B
S
0
.
(B
S
0
)
i, j
i j
λ
L
(l × (c
R
+ 1) + m)
×(c
S
+ 1) + c
S
+ 1
((l + 1) ×(c
R
+ 1) + m)
×(c
S
+ 1) + c
S
+ 1
(l + 1)µ
((l + 1) ×(c
R
+ 1) + m)
×(c
S
+ 1) + n + 1
(l × (c
R
+ 1) + m)
×(c
S
+ 1) + c
S
+ 1
if (0 ≤ m ≤ c
L
− 1, 0 ≤ n ≤ c
R
, 0 ≤ n ≤ c
S
)
λ
R
(l × (c
R
+ 1) + m)
×(c
S
+ 1) + c
S
+ 1
(l × (c
R
+ 1) + m + 1)
×(c
S
+ 1) + c
S
+ 1
(m + 1)µ
(l × (c
R
+ 1) + m + 1)
×(c
S
+ 1) + c
S
+ 1
(l × (c
R
+ 1) + m)
×(c
S
+ 1) + c
S
+ 1
if (0 ≤ m ≤ c
L
, 0 ≤ n ≤ c
R
− 1, 0 ≤ n ≤ c
S
)
λ
(l × (c
R
+ 1) + m)
×(c
S
+ 1) + n + 1
(l × (c
R
+ 1) + m)
×(c
S
+ 1) + n + 2
(n + 1)µ
(l × (c
R
+ 1) + m)
×(c
S
+ 1) + n + 2
(l × (c
R
+ 1) + m)
times(c
S
+ 1) + n + 1
if (0 ≤ m ≤ c
L
, 0 ≤ n ≤ c
R
, 0 ≤ n ≤ c
S
− 1)
Denoting I := {1,2,...,(c
L
+1) × (c
R
+1) × (c
S
+
1)}, J := {1, 2, ..., (c
L
+ 1) × (c
R
+ 1) × (c
S
+ 1) ×
2}, i ∈ I, we define the diagonal components of
B
D
0
, B
S
0
as follows.
(B
D(S)
0
)
i,i
= −
∑
j∈I\{i}
(B
D(S)
0
)
i, j
+
∑
j∈J
(C
0
)
i, j
!
.
C
0
is a matrix of size ((c
L
+ 1) × (c
R
+ 1) × (c
S
+
1)) × ((c
L
+ 1) × (c
R
+ 1) × (c
S
+ 1) × 2) that repre-
sents the transition of the number of customers in the
queue from zero to 1. Each element (C
0
)
i, j
is defined
as follows.
Table 10: Matrix components of C
0
.
(B
0
)
i, j
i j
λ
L
(c
L
× (c
R
+ 1) + m)
×(c
S
+ 1) + 1
(c
L
× (c
R
+ 1) + m)
×2 + 1
λ
R
(l + 1) ×(c
R
+ 1)
×(c
S
+ 1)
(l + 1) ×(c
R
+ 1)
×(c
S
+ 1) × 2
if(0 ≤ l ≤ c
L
, 0 ≤ m ≤ c
R
)
A
1
is a ((c
L
+ 1) × (c
R
+ 1) × (c
S
+ 1) × 2)-order
square matrix that represents the transition of states
when the number of customers in the queue is greater
than or equal to 1. Each element (A
1
)
i, j
is defined as
follows.
Table 11: Matrix components of A
1
.
(A
1
)
i, j
i j
(l + 1)µ
(l + 2) ×(c
R
+ 1)
×(c
S
+ 1) × 2
(l + 1) ×(c
R
+ 1)
×(c
S
+ 1) × 2
(m + 1)µ
(c
L
× (c
R
+ 1) + (m + 2))
×(c
S
+ 1) × 2 − 1
(c
L
× (c
R
+ 1) + (m + 1))
×(c
S
+ 1) × 2 − 1
if(0 ≤ l ≤ c
L
− 1, 0 ≤ m ≤ c
R
− 1)
We define the diagonal components of A
1
when
the number of customers in the queue is l as follows.
(A
1
)
i,i
= −
∑
j∈I
(B
l
)
i, j
+
l
∑
k=2
∑
j∈J
(A
k
)
i, j
+
∑
j∈I\{i}
(A
1
)
i, j
+
∑
j∈J
(A
0
)
i, j
!
.
A
k
(k ≥ 2) is a ((c
L
+1)× (c
R
+1)× (c
S
+1)× 2)-
order square matrix that represents the transition of
the number of customers in the queue decreasing by
k − 1 but not to zero. We define c
LS
and c
RS
as the
sum of the type-L servers and shared servers, type-
R servers and shared servers. Each element(A
k
)
i, j
is
defined as follows.
Table 12: Matrix components of A
k
.
(A
k
)
i, j
i j
c
LS
µλ
0
L
λ
0k−2
R
(c
L
× (c
R
+ 1) + m + 1)
×(c
S
+ 1) × 2 − 1
(c
L
× (c
R
+ 1) + k + m − 1)
×(c
S
+ 1) × 2 − 1
c
LS
µλ
0k−1
R
((c
L
+ 1) × (c
R
+ 1) + 2 − k)
×(c
S
+ 1) × 2 − 1
(c
L
+ 1) × (c
R
+ 1)
×(c
S
+ 1) × 2
c
RS
µλ
0
R
λ
0k−2
L
(l + 1) ×(c
R
+ 1)
×(c
S
+ 1) × 2
(k + l − 1) × (c
R
+ 1)
×(c
S
+ 1) × 2
c
RS
µλ
0k−−1
L
(c
L
+ 3 − k) × (c
R
+ 1)
×(c
S
+ 1) × 2
(c
L
+ 1) × (c
R
+ 1)
×(c
S
+ 1) × 2 − 1
if(0 ≤ l ≤ c
L
+ 2 − k, 0 ≤ m ≤ c
R
+ 2 − k)
B
k
(k ≥ 1) is a matrix of size ((c
L
+1)×(c
R
+1)×
(c
S
+ 1) × 2) × ((c
L
+ 1) × (c
R
+ 1) × (c
S
+ 1)) that
represents the transition of the number of customers
in the queue from k to zero. Each element(B
k
)
i, j
is
defined as follows.
Table 13: Matrix components of B
k
.
(B
k
)
i, j
i j
c
LS
µλ
0k−1
R
(c
L
× (c
R
+ 1) + m + 1)
×(c
S
+ 1) × 2 − 1
(c
L
× (c
R
+ 1) + k + m)
×(c
S
+ 1)
c
RS
µλ
0k−−1
L
(l + 1) ×(c
R
+ 1)
×(c
S
+ 1) × 2
(k + l) × (c
R
+ 1)
×(c
S
+ 1)
if(0 ≤ l ≤ c
L
+ 1 − k, 0 ≤ m ≤ c
R
+ 1 − k)
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
152
