
Method for Improving Quality of Adversarial Examples
Duc-Anh Nguyen
1 a
, Kha Do Minh
1 b
, Duc-Anh Pham
2 c
and Pham Ngoc Hung
1 d
1
VNU University of Engineering and Technology (VNU-UET),
Building E3, 144 Xuan Thuy Road, Cau Giay District, Hanoi, Vietnam
2
University of Transport Technology, 54 Trieu Khuc Road, Thanh Xuan District, Hanoi, Vietnam
Keywords:
Adversarial Example Generation, Deep Neural Network, Robustness, Autoencoder.
Abstract:
To evaluate the robustness of DNNs, most of the adversarial methods such as FGSM, box-constrained L-
BFGS, and ATN generate adversarial examples with small L
p
-norm. However, these adversarial examples
might contain many redundant perturbations. Removing these perturbations increases the quality of adver-
sarial examples. Therefore, this paper proposes a method to improve the quality of adversarial examples by
recognizing and then removing such perturbations. The proposed method includes two phases namely the au-
toencoder training phase and the improvement phase. In the autoencoder training phase, the proposed method
trains an autoencoder that learns how to recognize redundant perturbations. In the second phase, the pro-
posed method uses the trained autoencoder in combination with the greedy improvement step to produce more
high-quality adversarial examples. The experiments on MNIST and CIFAR-10 have shown that the proposed
method could improve the quality of adversarial examples significantly. In terms of L
0
-norm, the distance
decreases by about 82%-95%. In terms of L
2
-norm, the distance drops by around 56%-81%. Additionally,
the proposed method has a low computational cost. This shows the potential ability of the proposed method
in practice.
1 INTRODUCTION
Deep neural networks (DNNs) are widely used in im-
age classification (Carlini and Wagner, 2016; Cire-
gan et al., 2012; Sultana et al., 2019). Recent re-
search has shown that even DNNs achieve high ac-
curacy on the training set, these models might suffer
from poor robustness (Baluja and Fischer, 2017; Car-
lini and Wagner, 2016; Eniser et al., 2019; Goodfel-
low et al., 2015; Gopinath et al., 2019; Kurakin et al.,
2016; Zhang et al., 2019). The robustness of DNNs
measures the degree to which these DNNs work cor-
rectly in the presence of slight perturbations. Term
adversarial example is used to call an original input
image added slight perturbations. While the original
input images must be recognized correctly by the at-
tacked DNNs, these DNNs are not able to detect the
label of adversarial examples properly. Due to the ex-
istence of adversarial examples, this poses a security
concern on the robustness of DNNs.
a
https://orcid.org/0000-0002-6337-6254
b
https://orcid.org/0000-0002-1917-8314
c
https://orcid.org/0000-0002-6017-6740
d
https://orcid.org/0000-0002-5584-5823
Targeted attack is a well-known approach to gen-
erate adversarial examples. These adversarial exam-
ples could be used as evidence to demonstrate the ro-
bustness of DNNs. There are many methods in this
approach such as FGSM (Goodfellow et al., 2015),
BIS (Kurakin et al., 2016), ATN (Baluja and Fischer,
2017), Carnili-Wagner (Carlini and Wagner, 2016),
box-constrained L-BFGS (Szegedy et al., 2014), etc.
The general purpose of these methods is to generate
adversarial examples close to the original input im-
ages and classified as a target label. The target label
is different from the ground-truth label. To compute
the distance between adversarial examples and origi-
nal input images, the most common metric is L
p
-norm
metric. Some popular L
p
-norm could be referred to
L
0
-norm (Carlini and Wagner, 2016; Gopinath et al.,
2019), L
2
-norm (Baluja and Fischer, 2017; Carlini
and Wagner, 2016; Szegedy et al., 2014), and L
∞
-
norm (Goodfellow et al., 2015; Kurakin et al., 2016).
Although these methods could generate adversar-
ial examples with small L
p
-norm, these methods are
still confronted by the problem of redundant pertur-
bation. Specifically, these methods suggest their own
objective functions containing the objective functions
of the attacked DNNs. The objective functions of
214
Nguyen, D., Do Minh, K., Pham, D. and Hung, P.
Method for Improving Quality of Adversarial Examples.
DOI: 10.5220/0010814400003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 2, pages 214-225
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

these methods are minimized as much as possible.
The result of the minimization is a set of adversar-
ial examples with small L
p
-norm. However, due to
the non-linear property of DNNs, minimizing their
defined objective functions might struggle at the lo-
cal minimum. It means that the quality of adversarial
examples might not be optimal. In other words, ad-
versarial examples still might contain redundant per-
turbations. A perturbation is redundant if removing
it from an adversarial example does not change the
label of this adversarial example. If such redundant
perturbations are removed from adversarial examples,
the value of their defined objective functions would be
smaller. The L
p
-norm between the original input im-
ages and adversarial examples could be reduced sig-
nificantly. As the result, this makes the adversarial
examples closer to the original input images.
To mitigate the above problem, this paper pro-
poses a method that detects and removes redundant
perturbations with a low computational cost. We fo-
cus on L
0
-norm and L
2
-norm metrics. The proposed
method includes two main phases, namely the autoen-
coder training phase and the improvement phase. In
the autoencoder training phase, the proposed method
trains an autoencoder. The purpose of this autoen-
coder is to recognize redundantly adversarial features
in adversarial examples. An adversarial feature is re-
dundant if it contains redundant perturbation. There-
fore, it should be restored to its original value. The
original value is the value of the corresponding fea-
ture on the original input image. In the improvement
phase, an adversarial example is fed into the trained
autoencoder to generate the first version of the im-
proved adversarial example. However, because this
improved adversarial example might still contain re-
dundant perturbations, the proposed method uses a
greedy improvement step to remove these perturba-
tions.
The experiments on the MNIST dataset (Lecun
et al., 1998a) and the CIFAR-10 dataset (Krizhevsky,
2012) have shown that the proposed method could en-
hance the quality of adversarial examples consider-
ably. The proposed method is compared with a greedy
method. As a result, the introduced method could
achieve the L
0
-norm reduction rate of 82%-95% and
the L
2
-norm reduction rate of 56%-81%. Addition-
ally, the proposed method could improve the qual-
ity of new adversarial examples with a low compu-
tational cost. It takes several seconds to improve the
quality of about 1,000 adversarial examples.
The rest of this paper is organized as follows. Sec-
tion 2 provides the background of this topic. Section 3
describes a motivating example of this research. Sec-
tion 4 describes a greedy method to enhance the qual-
ity of adversarial examples. The overview of the pro-
posed method is shown in Section 5. Next, Section 6
presents the experiments to demonstrate the advan-
tages of the proposed method. Section 7 delivers the
overview of the related research. Finally, the conclu-
sion is described in Section 8.
2 BACKGROUND
In this section, the paper provides the background
about the adversarial example generation topic. We
first review the basic concept of DNNs and the tar-
geted attack. We then describe the overview of the
stacked convolutional autoencoder. Finally, this pa-
per reviews well-known adversarial example genera-
tion methods using L
p
-norm metric.
2.1 Deep Neural Network
A DNN M is made of h successive layers. A simple
representation of a DNN is as follows:
M(x) = Q
h−1
(Q
h−2
(...(Q
0
(x)))) ∈ R
k
(1)
where x ∈ R
d
is an input image of the DNN classi-
fier, d is the number of features, k is the number of
classes, h is the number of layers, and Q
i
is the i-th
layer. The input layer and the output layer are Q
0
and Q
h−1
, respectively. Each layer has one activa-
tion function. Some popular activation functions are
ReLU and softmax. The output of the DNN M is a
probability vector of size k. The predicted label of an
input x is computed by argmaxM(x).
2.2 Targeted Attack
The targeted attack is a popular approach to generate
adversarial examples. Given an input image x and a
target label y
∗
, the purpose of the targeted attack is
modifying this input to generate an adversarial exam-
ple x
0
. This adversarial example is classified as y
∗
,
which is different from the ground-truth label of x.
Additionally, x
0
should be close to x as much as pos-
sible.
Definition 1 (Adversarial Feature). Given an input
image x and its corresponding adversarial example
x’, a feature x
0
i
on x’ is considered as adversarial fea-
ture if and only if x
0
i
6= x
i
, where x
i
is the original value
of x
0
i
.
Definition 2 (Redundant Perturbation). Consider an
adversarial feature, its perturbation β is redundant if
and only if x’ and (x’ − β) are labelled the same. In
this case, this feature is called a redundantly adver-
sarial feature.
Method for Improving Quality of Adversarial Examples
215

Definition 3 (Improved Adversarial Example). An
improved adversarial example x’
im
is the result of re-
moving redundant perturbations from its correspond-
ing adversarial example x’, in which x’
im
and x’ are
assigned to the same label by M.
L
p
-norm. To measure the distance between origi-
nal input images and adversarial examples, the com-
monly used metric is L
p
-norm. Given an input image
x, its corresponding adversarial example x
0
should be
identical to x under L
p
-norm metric as much as possi-
ble. The main reason is that it does not make sense if
an adversarial example is too different from the orig-
inal input image. The L
p
-norm distance between the
input image x and its adversarial example x
0
is for-
mally defined as follows:
L
p
(x,x
0
) =
p
s
∑
i
(x
i
− x
0
i
)
p
(2)
2.3 Stacked Convolutional Autoencoder
A stacked convolutional autoencoder considers the
structure of 2D and 3D images. This type of autoen-
coder includes one encoder and one decoder. In the
encoder part, a layer can be down-sampling, convo-
lutional, and fully-connected. In the decoder part,
a layer can be up-sampling, deconvolutional, and
fully-connected. The typical objective function of the
stacked convolutional autoencoder is as follows:
∑
x
in
L
2
2
(x
in
,x
out
) (3)
where x
in
is the input image on the training set, x
out
is the corresponding reconstructed image of x
in
. The
distance between x
in
and x
out
is computed by using
metric L
2
-norm.
2.4 Popular Targeted L
p
-norm Attack
This part describes three common targeted attacks us-
ing L
p
-norm metric. While FGSM uses L
∞
-norm,
box-constrained L-BFGS and ATN use L
2
-norm. To
generate an adversarial example, these methods could
add perturbations to all features on an input image.
2.4.1 Box-constrained L-BFGS
Szegedy et al. (2014) proposed box-constrained L-
BFGS to generate adversarial examples. Their
method solves the following box-constrained opti-
mization problem:
minimize (1 − c) · L
2
2
(x
0
,x) + c · f (y
∗
,M(x
0
))
such that x
0
∈ [0, 1]
d
(4)
where f is a function to compute the difference be-
tween M(x
0
) and the target label y
∗
, and c is the
weight to balance two terms. A common choice of
f is cross-entropy.
2.4.2 FGSM
Goodfellow et al. (2015) proposed a fast gradient sign
method (FGSM) to generate adversarial examples.
Specifically, given an input image x, and a value ε,
its corresponding adversarial example x
0
is computed
as follows:
x
0
= x − ε · sign(∇
x
f (x,y
∗
,ζ)) (5)
where sign(.) returns the sign of ∇
x
f (x,y
∗
,ζ) and ε
is a positive value to shift values of all features in x.
2.4.3 ATN
Baluja and Fischer (2017) proposed ATN to generate
adversarial examples based on an autoencoder. The
input of the autoencoder is an input image x. The
output is an adversarial example x
0
. The authors sug-
gested using L
2
-norm to compute the distance be-
tween x
0
and x. The objective function of sample x
is as follows:
(1 − φ) · L
2
(x,x
0
) + φ · L
2
(M(x
0
),r
α
(M(x),y
∗
)) (6)
where r
α
(.) is a reranking function, φ is the weight
between the two terms of the objective function,
L
2
(M(x
0
),r
α
(M(x),y
∗
)) is the L
2
-norm distance be-
tween M(x
0
) and the expected probability vector
r
α
(M(x),y
∗
).
The reranking function r
α
(.) is defined as follows:
r
α
(M(x),y
∗
)
= norm
α · max(M(x)) i f i = y
∗
M(x)
i
otherwise
i∈{0..k−1}
(7)
where α > 1 is used to specify how much larger y
∗
should be than max(M(x)). Function norm(·) nor-
malizes its input to a probability distribution.
3 MOTIVATING EXAMPLE
Many methods are proposed to generate adversar-
ial examples with small L
p
-norm. For L
0
-norm,
some well-known methods could be referred to
Carnili-Wagner L
0
(Carlini and Wagner, 2016) and
DeepCheck (Gopinath et al., 2019). Concerning L
2
-
norm, Carnili-Wagner L
2
(Carlini and Wagner, 2016),
box-constrained L-BFGS (Szegedy et al., 2014), and
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
216
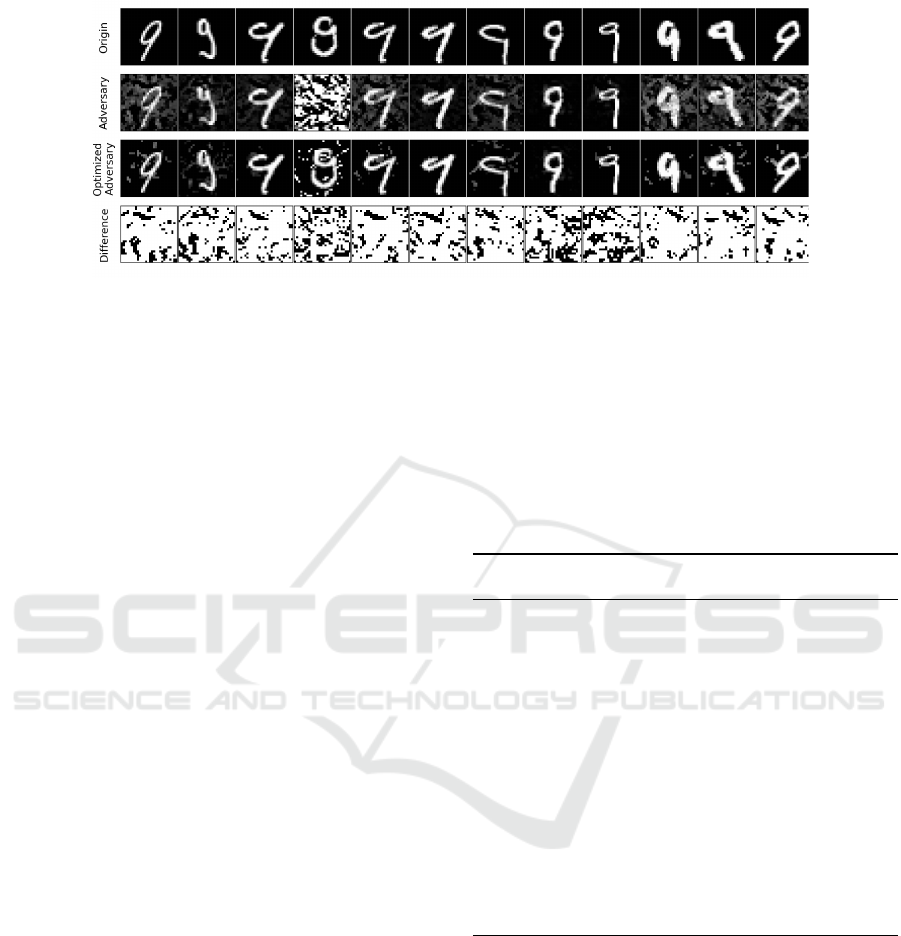
Figure 1: A motivating example.
ATN (Baluja and Fischer, 2017) are common meth-
ods. We observed that the quality of the adversar-
ial example generated by these methods could be en-
hanced more in terms of L
0
-norm and L
2
-norm.
Figure 1 shows a motivating example of this re-
search. The first row Origin shows the original im-
ages which are modified to produce adversarial exam-
ples. The second row Adversary contains adversar-
ial examples generated by applying box-constrained
L-BFGS. The third row shows the optimized adver-
sary. The last row represents the difference between
the second row and the third row. White pixel denotes
the difference and dark pixel is corresponding to iden-
ticalness.
As can be seen, by comparing the second row and
the third row, some optimized adversarial examples
are very different from the corresponding adversarial
examples. In other words, the adversarial examples
in the second row still contain many redundant per-
turbations. To minimize L
0
-norm and L
2
-norm, these
redundant perturbations should be recognized and re-
moved from the adversarial examples. Therefore, this
paper proposes a method to enhance the quality of
adversarial examples generated by any adversarial at-
tacks with low computational cost. We focus on L
0
-
norm and L
2
-norm.
4 GREEDY METHOD
To the best of our knowledge, there is no similar work
to improve the quality of adversarial examples gen-
erated by adversarial attacks. Most of the research
on this topic aims to generate high-quality adversar-
ial examples during the adversarial attack, not after
the adversarial attack. Therefore, to show the effec-
tiveness of the proposed method, this research com-
pares it with a greedy approach. We also explain why
although the greedy method could produce good re-
sults of adversary improvement, it has several prob-
lems when applying in practice.
Algorithm 1 describes the overview of the greedy
method to enhance the quality of an adversarial exam-
ple. The input includes an adversarial examples x
0
, its
corresponding input image x, an attacked model M,
and a step α. The target label is the predicted label
of x
0
. The output is an improved adversarial exam-
ple. The greedy method is used as a baseline in the
experiments.
Algorithm 1: Greedy Method: Improve the quality of ad-
versarial examples in terms of L
0
-norm and L
2
-norm.
Input: adversarial example x
0
, input image x, DNN M,
step α
Output: An improved adversarial example
1: l = argmax(M(x
0
))
2: while α > 0 do
3: F
adv
← GET-ADVERSARIAL-FEATURES(x, x
0
)
4: B
adv
= F
0..α−1
S
F
α..2∗α−1
S
...
S
F
n∗α..kF
adv
k
5: for F
i.. j
∈ B
adv
do
6: x
0
= Update x
0
i
← x
i
, ..., x
0
j
← x
j
7: if argmax(M(x
0
)) 6= l then
8: Undo the step 6
9: end if
10: end for
11: α ← bα/2c
12: end while
13: return x
0
In the greedy method, a set of adversarial features
(denoted by F
adv
) is detected by comparing x
0
and x
(line 3). The order of adversarial features is arranged
from the top left corner to the bottom right corner of
x
0
. The greedy method attempts to restore the adver-
sarial features on this set to the original values. The
original value of adversarial feature x
0
i
is x
i
. We use a
step (denoted by α >= 1) to determine the number of
adversarial features restored at the same time.
The greedy method specifies subsets of adversar-
ial features by dividing the set F
adv
(line 4). Subset
F
i.. j
stores the adversarial features from i
th
position
Method for Improving Quality of Adversarial Examples
217
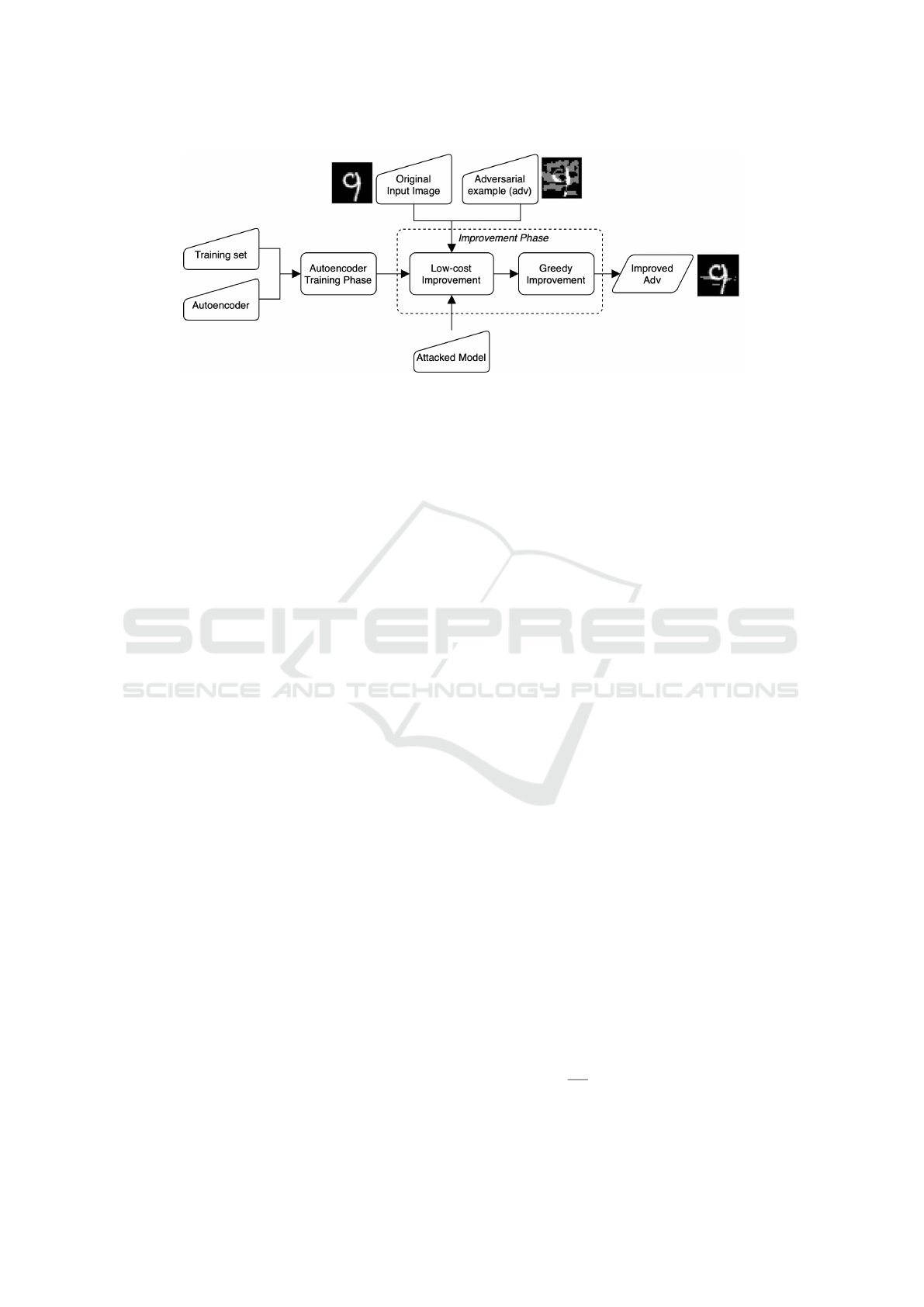
Figure 2: The overview of the proposed method.
to j
th
position on F
adv
. After that, we iterate over
these subsets. At each iteration, the adversarial fea-
tures from i
th
position to j
th
position on x
0
attempts
to be restored to the original values (line 6). There
are two cases. If this restoration changes the label of
x
0
(line 7 - 8), the modification on x
0
is reverted to
preserve its predicted label. Otherwise, the modifica-
tion on x
0
is kept. The algorithm moves to the next
subset of F
adv
.
When more adversarial features are restored at the
same time, the probability to change the decision of
the attacked model on x
0
is larger. Therefore, after
iterating all subsets F
i.. j
, the step α decreases by twice
(line 11). The algorithm performs the restoration of
adversarial features with a smaller size of subset F
i.. j
.
The algorithm terminates when α is not greater than 1.
However, the greedy method has two main limi-
tations. Firstly, the greedy method does not support
the generalization ability. The experiences of improv-
ing an adversarial example in the past are not utilized
to enhance new adversarial examples. Secondly, this
method has poor performance. The total cost of ex-
ecuting line 7 could be time-consuming. The DNN
model predicts the label of the temporary modifica-
tion of an adversarial example. It requires the ini-
tialization of DNN, many computations on the DNN
graph to obtain a result. Especially, this cost could
be huge when the number of redundantly adversar-
ial features is large. For example, in FGSM, most of
the features on an input image would be modified to
generate an adversarial example. It means that more
number iterations (i.e., line 5) would be performed.
5 THE PROPOSED METHOD
This paper proposes a method to mitigate the limita-
tion of the greedy method. The overview of the pro-
posed method is illustrated in Fig. 2. The proposed
method includes two main phases, namely autoen-
coder training phase and improvement phase. The
purpose of the autoencoder training phase is to train
an autoencoder, which is an input of the second phase.
The purpose of the improvement phase is to enhance
the quality of adversarial examples in terms of L
0
-
norm and L
2
-norm distance.
5.1 Autoencoder Training Phase
The input of this phase includes the training set and
the architecture of an autoencoder denoted by g. The
output of this phase is a trained autoencoder.
The training set is a set of (x
0
,s
x
0
), where x
0
∈ R
d
is an unimproved adversarial example and s
x
0
∈ R
d
is
a 0-1 vector. Each value s
x
0
[i] represents the probabil-
ity to restore the adversarial feature x
0
[i] to the original
values:
s
x
0
[i] =
1 if x
0
i
is redundant
0 otherwise
(8)
For example, consider an unimproved adversarial
example x
0
= [0, 0,1,...,0.5, 0]
T
∈ R
784
. The corre-
sponding input image of this adversarial example is
x = [1,0,1, ...,0.5,0]
T
∈ R
784
. Restoring the adver-
sarial feature x
0
0
(i.e., value 0) to the original value
(i.e., value 1) produces a modified adversarial exam-
ple. If the label of the modified adversarial example
is the same as that of x
0
, x
0
0
is redundant. Therefore,
s
x
0
[0] is assigned to 1. Otherwise, s
x
0
[0] is assigned
to 0.
The architecture of the autoencoder g is defined
manually. The output of the autoencoder from an ad-
versarial example x
0
is denoted by g(x
0
). For an ad-
versarial example x
0
on the training set, the objective
of the autoencoder is defined as follows:
1
|x
0
|
|x
0
|−1
∑
i=0
f (s
x
0
[i],g(x
0
)[i])
(9)
where f is binary cross-entropy.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
218

The proposed autoencoder in Equation 9 is differ-
ent from the traditional autoencoder. The main dif-
ference is the output g(x
0
) of the autoencoder. In the
traditional autoencoder, g(x
0
) should be identical to
the input x
0
. In this case, the metric mean squared er-
ror is usually used to measure the distance between
x
0
and g(x
0
). However, in our proposed autoencoder,
g(x
0
) is a probability vector. Therefore, we use binary
cross-entropy to compare g(x
0
) and s
x
0
.
5.2 Improvement Phase
This phase improves the quality of adversarial exam-
ples in terms of L
0
-norm and L
2
-norm. The input
of this phase is an attacked model M, a trained au-
toencoder g (i.e., the result of the previous phase),
an unimproved adversarial example x
0
, and its corre-
sponding input image x. The output of this phase is
an improved adversarial example. This phase has two
main steps including a low-cost improvement step and
a greedy improvement step.
Low-cost Improvement Step. In this step, the
trained autoencoder g is used to generate the first ver-
sion of the improved adversarial example, denoted by
x
0
1
. Because g(x
0
) is a probability vector, we need
a threshold δ ∈ [0,1] to determine whether g(x
0
)[i] is
classified as redundant or not. The first version x
0
1
is
created as follows:
x
0
1
[i] =
x
0
i
if g(x
0
)[i] <= δ
x
i
otherwise
(10)
The first version x
0
1
is then predicted by the at-
tacked model M. If the label of x
0
1
is the same as that
of x
0
, x
0
1
is then fed into the second step of this phase.
Otherwise, the value of threshold δ should increase.
When δ increases, there is fewer number of redun-
dantly adversarial features. As a result, x
0
1
is more
close to x
0
. The attacked model M tends to predict the
label of x
0
1
and x
0
the same.
The low-cost improvement step takes low compu-
tational cost. The experiment has shown that this au-
toencoder takes around 1-2 seconds for the MNIST
dataset (Lecun et al., 1998a) and around 3-4 sec-
onds for the CIFAR-10 dataset (Krizhevsky, 2012) for
about 1,000 adversarial examples.
Greedy Improvement Step. It is observed that the
first version x
0
1
could be enhanced more. There are
some adversarial features on x
0
1
that could be re-
stored to the original values. Therefore, the pro-
posed method applies the greedy method described in
Sect. 4 to find out such adversarial features. The out-
put of this step is the second version of the improved
adversarial example, denoted by x
0
2
. The proposed
method returns x
0
2
as the final improved adversarial
example of x
0
and terminates.
6 EXPERIMENTAL RESULTS
To demonstrate the advantages of the proposed
method, the experiments address the following ques-
tions:
• RQ1 - Success Rate of Autoencoder: Does the
trained autoencoder improve most of the adversar-
ial examples?
• RQ2 - Quality: Does the proposed improvement
phase reduce the L
0
-norm and L
2
-norm of the
unimproved adversarial examples?
• RQ3 - Performance: Does the proposed im-
provement phase achieve good performance when
dealing with the unimproved adversarial exam-
ples?
For the autoencoder training phase, we answer
RQ1 to investigate the effectiveness of the trained au-
toencoders. For the improvement phase, the experi-
ments answer RQ2 and RQ3 by comparing this phase
with the greedy method. The experiments are per-
formed on Google Colab
1
.
6.1 Configuration
6.1.1 Dataset
The experiments are conducted on the
MNIST dataset (Lecun et al., 1998a) and the
CIFAR-10 (Krizhevsky, 2012) dataset. These
datasets are used commonly to evaluate the robust-
ness of DNN models (Zhang et al., 2019). About
the MNIST dataset, it is a collection of handwritten
digits. The training set has 60,000 images and the
test set contains 10,000 images of size 28 × 28 ×
1. There are 10 labels representing the digits from
0 to 9. Concerning the CIFAR-10 dataset, it is a
collection of images labelled as aeroplanes, trucks,
birds, cats, etc. It has 50,000 images on the training
set and 10,000 images of size 32 × 32 × 3 on the test
set. One pixel is described in a combination of red,
green, and blue channels.
6.1.2 Attacked Model
For the MNIST dataset, the experiments use
LeNet-5 (Lecun et al., 1998b). This architec-
ture is introduced to recognize handwritten dig-
its. For the CIFAR-10 dataset, the experiments use
1
https://colab.research.google.com/
Method for Improving Quality of Adversarial Examples
219

AlexNet (Krizhevsky et al., 2017). Compared to the
architecture of LeNet-5, the architecture of AlexNet
is more complicated. This model is used for general-
purpose image classification. The accuracies of the
trained models are shown in Table 1.
Table 1: The accuracy of attacked models.
Dataset Model Training set Test set
MNIST LeNet-5 99.86% 98.82%
CIFAR-10 AlexNet 99.70% 76.22%
6.1.3 Adversarial Example
The adversarial examples are generated by apply-
ing three adversarial attacks including FGSM, box-
constrained L-BFGS, and ATN. The purpose is to
demonstrate the effectiveness of the proposed method
when dealing with various adversarial examples. For
FGSM and L-BFGS, the experiments use their orig-
inal equations. For ATN, we make several small
modifications in Equation 6 to generate more high-
quality adversarial examples. We empirically use
cross-entropy instead of L
2
-norm to compare the dis-
tance between the expected probability and the pre-
dicted probability. Additionally, we use the identity
function instead of the reranking function.
If the original input images labelled m are mod-
ified into an adversarial example classified as n, the
experiments denote as the attack m → n for simplic-
ity. For the MNIST dataset, the attack is 9 → 4. For
the CIFAR-10 dataset, the attack is truck → horse.
6.1.4 The Proposed Method
Autoencoder Training Phase. In the first phase of
the proposed method, we train autoencoders to recog-
nize redundant perturbations existing inside an adver-
sarial example. Each autoencoder is trained on 6,000
samples by using the Equation 9. A sample is a set
of (x
0
,s
x
0
), where x
0
is unimproved adversarial exam-
ples. These training sets are denoted by X
train
. These
autoencoders are trained in 300 epochs.
The architectures of autoencoders should be de-
fined based on the experience of machine learning
testers. The experiments use stacked convolutional
autoencoders because these autoencoders could learn
the characteristics of 2D and 3D images better than
traditional autoencoders. Table 2 describes the gen-
eral architecture of the autoencoders used in the pro-
posed method. The architectures of these autoen-
coders are the same, except for the input layer and the
output layer. The layer before the output layer uses
sigmoid to compute the probability for binary classi-
fication.
Table 2: The architectures of the autoencoders used in the
proposed method. For MNIST, the shape of input is (28,
28, 1). For CIFAR-10, the shape of input is (32, 32, 3).
Layer Type Configuration
Input #width × #height × #channel
Conv2D + ReLU kernel = (3, 3), #filters = 64
Conv2D + ReLU kernel = (3, 3), #filters = 64
BatchNormalization
MaxPooling pool˙size = (2, 2)
Conv2D + ReLU kernel = (3, 3), #filters = 32
Conv2D + ReLU kernel = (3, 3), #filters = 32
BatchNormalization
MaxPooling2D pool˙size = (2, 2)
Conv2D + ReLU kernel = (3, 3), #filters = 32
Conv2D + ReLU kernel = (3, 3), #filters = 32
BatchNormalization
UpSampling2D pool˙size = (2, 2)
Conv2D + ReLU kernel = (3, 3), #filters = 64
Conv2D + ReLU kernel = (3, 3), #filters = 64
BatchNormalization
UpSampling2D pool˙size = (2, 2)
Conv2D + Sigmoid kernel = (3, 3), #filters = #channel
Output #width × #height × #channel
Improvement Phase. The experiments use 1,000 ad-
versarial examples denoted by X
test
to evaluate the ef-
fectiveness of the proposed method. These adversar-
ial examples are not used to train autoencoders. The
configuration of improvement is as follows:
• Low-cost Improvement Step. Unimproved ad-
versarial examples are fed into the trained autoen-
coders.
• Greedy Improvement Step. For MNIST, the
value of step α (in Algorithm 2) is 6. While the
number of features on CIFAR-10 is much larger
than that of MNIST, the initial value of step α for
CIFAR-10 should be larger. For CIFAR-10, we
empirically assign the initial value of step α to 60.
6.1.5 Baseline
The proposed method is compared with the greedy
method. It is the baseline in the experiment. The in-
put of the baseline is 1,000 unimproved adversarial
examples. These adversarial examples are the same
as the adversarial examples used in the improvement
phase of the proposed method.
Additionally, the configuration α of the baseline
is the same as the greedy improvement step in the
proposed method. Specifically, for MNIST, the ini-
tial value of step α is 6. For CIFAR-10, the initial
value of step α is 60.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
220
6.2 Answer for RQ1 - Success Rate of
Autoencoder
This section investigates the success rate of the au-
toencoders. These autoencoders are trained on X
train
consisting of around 6,000 samples and evaluated on
X
test
consisting of about 1,000 samples. The success
rate is the percentage of the unimproved adversarial
examples which are enhanced successfully by the au-
toencoders. If the success rate is close to 100%, most
unimproved adversarial examples are enhanced their
quality by the trained autoencoders.
We observed that increasing threshold δ in Equa-
tion 10 would increase the success rate. The main rea-
son is that when the value of δ goes up, there is less
number of adversarial features restored to the orig-
inal values. In other words, the modified adversar-
ial example is closer to the unimproved adversarial
example. As a result, the label of the modified ad-
versarial example tends to be the same as that of the
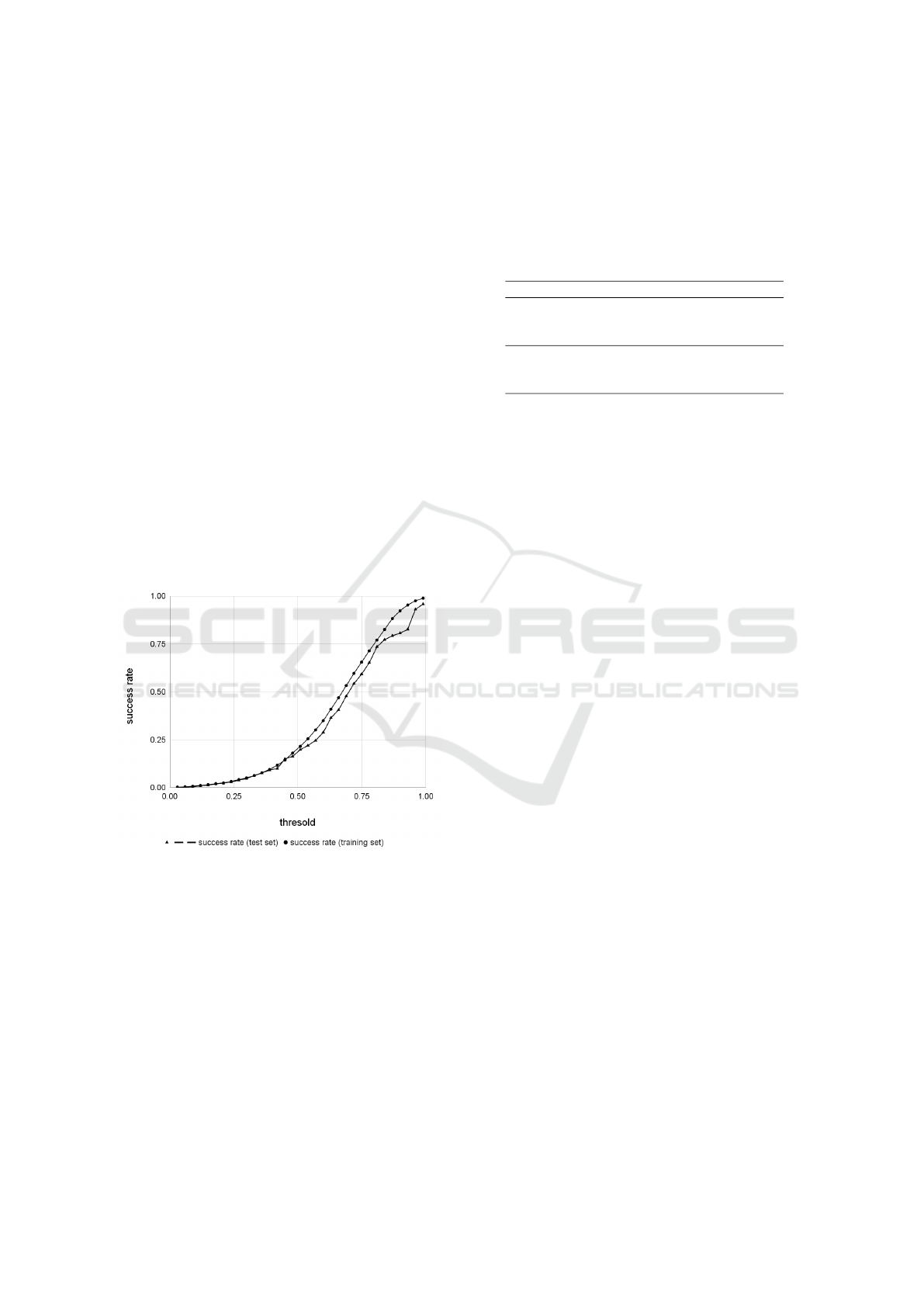
unimproved adversarial example. For example, Fig. 3
describes the impact of threshold on the success rate.
As can be seen, the success rate increases to nearly
100% when δ goes up to nearly 1.
Figure 3: Trend of success rate when using different thresh-
olds. The adversarial examples are generated by FGSM.
The attacked model is LeNet-5 trained on MNIST.
The experiments continue investigating more
deeply the impact of three values of δ including 0.93,
0.96, and 0.99 on success rate. The main reason of
using these δ is that it would result in high success
rate. We compute the average success rate rather
than reporting the success rate of each threshold in-
dividually. Table 3 shows the average success rate of
the trained autoencoders. For example, 97.2% means
the trained autoencoders could improve the quality of
about |X
train
| × 97.2% adversarial examples. As can
be seen, the trained autoencoders could enhance the
quality of most adversarial examples on X
train
, from
around 87% to about 97%. For X
test
, the success rates
are from around 81% to about 90%. This shows that
the trained autoencoders can recognize redundant per-
turbation inside adversarial examples effectively.
Table 3: Average success rate of the trained autoencoders.
Dataset Method Training set Test set
MNIST
FGSM 97.2% 90.4%
L-BFGS 89.3% 87.1%
ATN 95.2% 92.2%
CIFAR-10
FGSM 87.4% 81.3%
L-BFGS 87.3% 83.3%
ATN 87.7% 86.4%
The trained autoencoders in RQ1 are used to an-
swer RQ2 and RQ3. These two research questions
only evaluate the effectiveness of the improvement
phase. Given the same subset of unimproved ad-
versarial examples, the experiments investigate if the
proposed improvement phase works better than the
greedy method. Two compared metrics are the reduc-
tion rate of L
0
/L
2
-norm and the performance.
6.3 Answer for RQ2 - Quality
Improvement
This section demonstrates how the proposed improve-
ment phase enhances the quality of X
test
in terms
of L
0
-norm and L
2
-norm. These adversarial exam-
ples are not used to train the autoencoder. The com-
pared method is the greedy method. The compared
metric is the reduction rate, which is computed by
(a − b)/a ∈ [0, 1), where a is the distance before the
improvement, b is the distance after the improvement.
It is expected that b should be as small as possible.
In the proposed improvement phase, the process
of improving adversarial examples is as follows. In
the first step, X
test
is fed into the low-cost improve-
ment step. The improved adversarial examples are
the first version of the improvement. In the second
step, the output of the first step is fed into the greedy
improvement step to enhance its quality more.
In the low-cost improvement step, the parameter
δ of the trained autoencoders should be chosen to im-
prove the quality of X
test
as much as possible. We
empirically observed that δ ∈ [0.8,1) would result in
good reduction rate of L
0
-norm and L
2
-norm. For
example, Fig. 4 describes the impact of threshold δ
on the reduction rate of L
0
-norm and L
2
-norm. As
can be seen, increasing the threshold δ to around 0.9x
improves the reduction rate of both L
0
-norm and L
2
-
norm significantly. The reduction rates then decrease
slightly when δ is very close to 1.
Based on the above observation, the experiments
Method for Improving Quality of Adversarial Examples
221
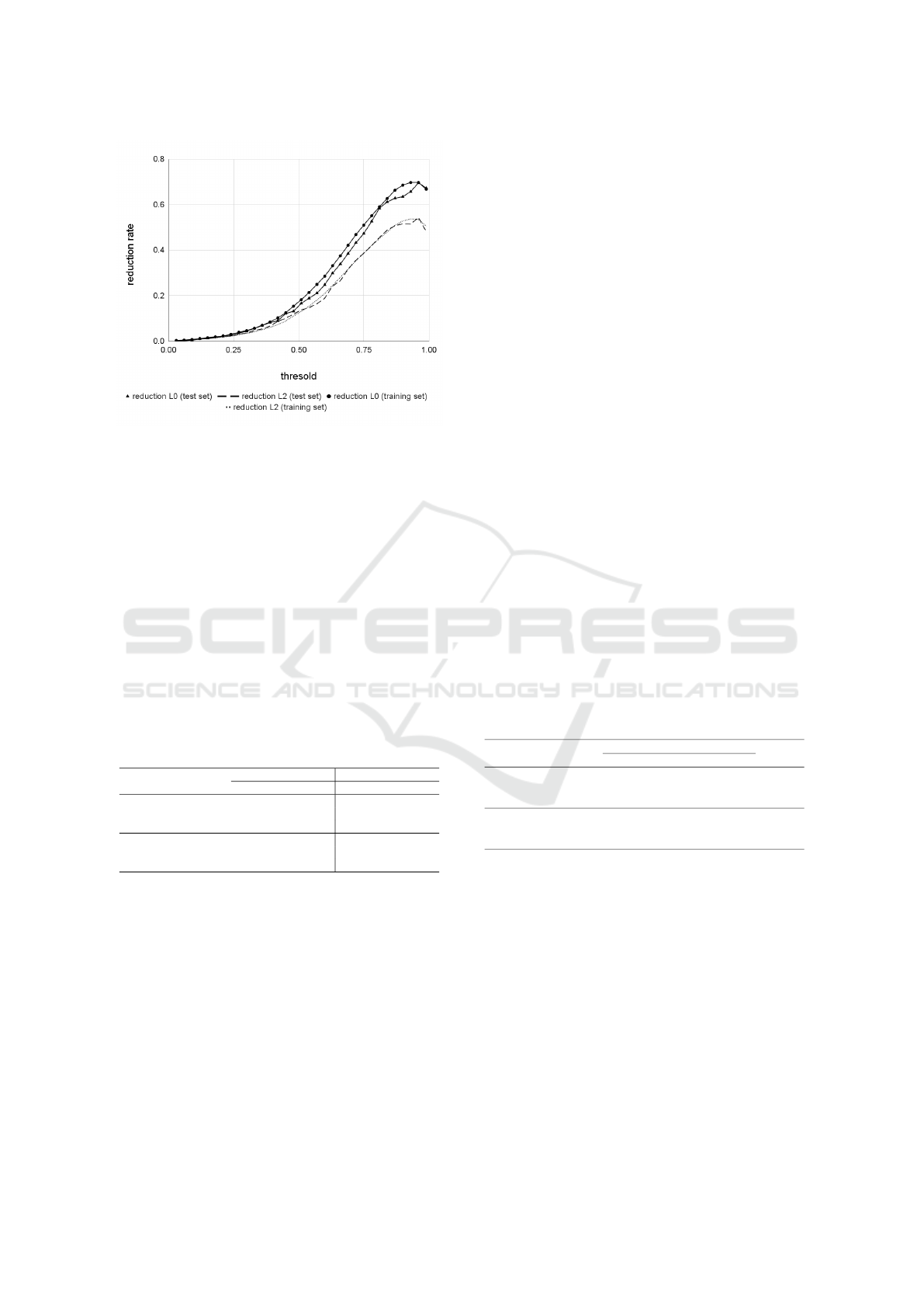
Figure 4: Trend of reduction rate when using different
thresholds δ. The adversarial examples are generated by
FGSM. The attacked model is LeNet-5 trained on MNIST.
choose δ used in RQ1 (i.e., 0.93, 0.96, and 0.99)
to make comparison with the greedy method. Ta-
ble 4 shows the average reduction rate of L
0
-norm
and L
2
-norm. Generally, the proposed improvement
phase produces better results than the greedy method
in 8/12 cases. The experiment shows that the pro-
posed improvement phase could achieve the reduction
rate from around 82% to about 95% in terms of L
0
-
norm. Concerning L
2
-norm, the reduction rate of the
proposed improvement phase is from around 56% to
approximately 81%.
Table 4: The average reduction rate (%) of L
0
-norm and L
2
-
norm on X
test
. Better values are bold. Notion * means that
we ignore the process of training autoencoder.
L
0
-norm L
2
-norm
Dataset Method
Proposal*
Greedy
Proposal*
Greedy
FGSM 82.58 82.40 68.91 68.07
L-BFGS 82.38 82.30 68.01 72.79MNIST
ATN 95.20 94.27 59.67 56.77
FGSM 85.27 84.92 81.07 79.31
L-BFGS 83.90 87.14 63.8 66.54CIFAR-10
ATN 86.45 88.69 68.27 66.09
Figure 5 shows some examples of the improved
adversarial examples by applying the proposed im-
provement phase. Row origin represents the input
images, which are modified to generate adversarial
examples. The result of adversarial attacks on these
input images is stored in the second row unimproved
adv. The adversarial examples in this row are not im-
proved by applying the proposed improvement phase.
The third row low-cost adv shows the first version
of the improved adversarial examples. This row is
the result of applying the low-cost improvement step.
The last row improved adv shows the result of ap-
plying the greedy method. The first version of the
improved adversarial examples is fed into the greedy
method to generate more high-quality results. As can
be seen, in terms of human perception, the low-cost
improvement step could enhance the quality of unim-
proved adversarial examples significantly. However,
there are some redundantly adversarial perturbations
in the third row. By applying the greedy improvement
step, such perturbations are detected and removed.
6.4 Answer for RQ3 - Performance
This section evaluates the performance of the pro-
posed improvement phase when dealing with X
test
.
These adversarial examples are used in RQ2. This
experiment uses different values of threshold δ (i.e.,
0.93, 0.96, and 0.99) as discussed in RQ1 and RQ2.
Table 5 shows the performance comparison in sec-
onds between the proposed improvement phase and
the greedy method. The computational cost of the
proposed improvement phase includes the low-cost
improvement step and the greedy improvement step.
In the low-cost improvement step, X
test
are fed into
the trained autoencoders to retrieve the first version
of the improved adversarial examples. However, we
observed that these improved adversarial examples
could be enhanced more in terms of L
0
-norm and L
2
-
norm. Therefore, these improved adversarial exam-
ples are put into the greedy improvement step to ob-
tain the second version of improvement.
Table 5: The average performance comparison (seconds)
between the proposed improvement phase and the greedy
method on the test set. Better values are bold.
Proposed improvement phase
Dataset Method
Low-cost Greedy
∑
Greedy
FGSM 1.1 13.1 14.2 80.3
L-BFGS 1.2 27.6 28.8 98.3MNIST
ATN 1.4 20.1 21.5 120.2
FGSM 3.7 29.1 32.8 250.8
L-BFGS 3.5 46.1 49.6 261.1CIFAR-10
ATN 3.4 62.1 65.5 254.5
As can be seen, the performance of the proposed
improvement phase outperforms that of the greedy
method. On the MNIST dataset, the proposed im-
provement phase usually requires from around 14.2
seconds to about 28.8 seconds, which is from roughly
3 times faster to around 6 times faster than that of the
greedy method. On the CIFAR-10 dataset, the time of
the proposed improvement phase is approximately 4
times to 8 times faster than that of the greedy method.
The main reason is that in the proposed improvement
phase, most of the adversarial features are restored
to the original values by applying the trained autoen-
coders. As a result, there is only a small set of re-
dundant features restored by the greedy improvement
step. This helps to reduce the cost of the greedy im-
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
222

provement step, which is a time-consuming process.
Combining the result of research questions, the
experiments show three insights. The first insight is
that the proposed improvement phase could improve
the quality of most adversarial examples. The second
result is that the proposed improvement phase could
improve the quality of new adversarial examples con-
siderably. The third insight is that the proposed im-
provement phase has a low computational cost when
dealing with new adversarial examples.
7 RELATED WORK
This section presents an overview of related research.
Firstly, we discuss some well-known adversarial at-
tacks using L
p
-norm metric. Secondly, we clarify
the novelty of the proposed method by discussing the
state of adversarial example improvement methods.
Adversarial Example Generation. Many adver-
sarial example generation methods are introduced to
evaluate the robustness of DNNs. These methods add
perturbations to an input image to generate an ad-
versarial example. Several common methods are de-
scribed as follows.
Box-constrained L-BFGS (Szegedy et al., 2014)
minimizes L
2
-norm by proposing an objective func-
tion for each input image. This objective ensures that
the modification of an input image is small while it
is classified as a target label. However, this method
does not treat the complex DNNs well because of the
highly nonlinear property of the objective function.
Similarly to box-constrained L-BFGS, DeepFool
(Moosavi-Dezfooli et al., 2015) aims to generate ad-
versarial examples with small L
2
-norm. This method
assumes that the network to be completely linear.
They compute a solution on the tangent plane (orthog-
onal projection) of a point on the classifier function.
However, DNNs are not linear, this method then takes
a step towards that solution, and repeats the process.
The search terminates when an adversarial example is
found.
FGSM (Goodfellow et al., 2015) adds perturba-
tion to all features. This method has a low computa-
tional cost. However, the generated adversarial exam-
ples usually contain visible noises, which is not real-
istic in practice. Additionally, the L
∞
-norm distance
is sensitive to the value of the input parameter.
Carnili-Wagner (Carlini and Wagner, 2016) im-
proves the box-constrained L-BFGS by reducing the
highly nonlinear property of the objective function.
They apply the change of variable technique and use
a simpler objective function. Their experiments have
shown that the perturbation is much smaller than box-
constrained L-BFGS.
Unlike the above methods, ATN (Baluja and Fis-
cher, 2017) trains autoencoder for adversarial attack.
The autoencoder could be used to generate adversar-
(a) MNIST (b) CIFAR-10
Figure 5: Examples of the improved adversarial examples by the proposed improvement phase.
Method for Improving Quality of Adversarial Examples
223

ial examples from new input images with a low com-
putational cost. Their method has the generalization
ability, which is not supported by most of the exist-
ing methods.
DeepCheck (Gopinath et al., 2019) is the first
symbolic execution tool for testing DNNs. This
method translates a DNN into a Java program. From
an input image, the program is instrumented and exe-
cuted to get the execution path. After that, symbolic
execution is applied on this path to obtain path con-
straints. These path constraints are modified by fixing
a set of features. The modified constraints are solved
by using an SMT-Solver such as Z3 (De Moura and
Bjørner, 2008) to get a solution. This method could
generate an adversarial example with a very small L
0
-
norm. However, this method consumes a large com-
putational cost due to the symbolic execution and the
usage of SMT-Solvers.
Adversarial Example Improvement. To the best
of our knowledge, most works in this field do not
consider the improvement of adversarial examples as
an independent phase. Instead, they add the objec-
tive of L
p
-norm minimization to the objective func-
tion such as box-constrained L-BFGS (Szegedy et al.,
2014), Carnili-Wagner (Carlini and Wagner, 2016),
ATN (Baluja and Fischer, 2017), etc. Our method
could be considered as the second phase of the ad-
versarial example generation methods. The proposed
method could be used to enhance the quality of adver-
sarial examples generated by any attack.
8 CONCLUSION
We have presented a method to improve the qual-
ity of adversarial examples in terms of L
0
-norm and
L
2
-norm. The proposed method includes two phases
namely the autoencoder training phase and the im-
provement phase. In the autoencoder training phase,
the proposed method trains an autoencoder to learn
how to detect redundantly adversarial features. In
the improvement phase, the autoencoder improves the
quality of a new adversarial example to generate the
first version of the improvement. After that, the first
improvement version is fed into the greedy improve-
ment step to enhance more. The experiments are
conducted on the MNIST dataset and the CIFAR-10
dataset. The proposed method could enhance the L
0
-
norm and L
2
-norm significantly. Additionally, the
proposed method could improve the quality of new
adversarial examples with a low computational cost.
It means that the proposed method could be applied
in practice.
In the future, we would investigate more deeply
the impact of high-quality adversarial examples on
the performance of the adversarial defence. Be-
sides, we would evaluate the effectiveness of the pro-
posed method with different kinds of autoencoder
such as denoising autoencoder, sparse autoencoder,
variational autoencoder, symmetric autoencoder, etc.
Finally, we would investigate the effectiveness of
the proposed method with the adversarial examples
generated by other methods such as Carnili-Wagner,
DeepFool, DeepCheck, etc.
ACKNOWLEDGEMENTS
This work has been supported by VNU University
of Engineering and Technology under project number
CN21.09.
Duc-Anh Nguyen was funded by Vingroup JSC
and supported by the Master, PhD Scholarship Pro-
gramme of Vingroup Innovation Foundation (VINIF),
Institute of Big Data, code VINIF.2021.TS.105.
Kha Do Minh was funded by Vingroup JSC
and supported by the Master, PhD Scholarship Pro-
gramme of Vingroup Innovation Foundation (VINIF),
Institute of Big Data, code VINIF.2021.ThS.24.
REFERENCES
Baluja, S. and Fischer, I. (2017). Adversarial transformation
networks: Learning to generate adversarial examples.
Carlini, N. and Wagner, D. A. (2016). Towards eval-
uating the robustness of neural networks. CoRR,
abs/1608.04644.
Ciregan, D., Meier, U., and Schmidhuber, J. (2012). Multi-
column deep neural networks for image classification.
In 2012 IEEE Conference on Computer Vision and
Pattern Recognition, pages 3642–3649.
De Moura, L. and Bjørner, N. (2008). Z3: An efficient smt
solver. In Proceedings of the Theory and Practice of
Software, 14th International Conference on Tools and
Algorithms for the Construction and Analysis of Sys-
tems, TACAS’08/ETAPS’08, pages 337–340, Berlin,
Heidelberg. Springer-Verlag.
Eniser, H. F., Gerasimou, S., and Sen, A. (2019). Deepfault:
Fault localization for deep neural networks. CoRR,
abs/1902.05974.
Goodfellow, I. J., Shlens, J., and Szegedy, C. (2015). Ex-
plaining and harnessing adversarial examples.
Gopinath, D., P
˘
as
˘
areanu, C. S., Wang, K., Zhang, M., and
Khurshid, S. (2019). Symbolic execution for attribu-
tion and attack synthesis in neural networks. In Pro-
ceedings of the 41st International Conference on Soft-
ware Engineering: Companion Proceedings, ICSE
’19, page 282–283. IEEE Press.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
224

Krizhevsky, A. (2012). Learning multiple layers of features
from tiny images. University of Toronto.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2017). Im-
agenet classification with deep convolutional neural
networks. Commun. ACM, 60(6):84–90.
Kurakin, A., Goodfellow, I. J., and Bengio, S. (2016).
Adversarial examples in the physical world. CoRR,
abs/1607.02533.
Lecun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1998a).
Gradient-based learning applied to document recogni-
tion. In Proceedings of the IEEE, pages 2278–2324.
Lecun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1998b).
Gradient-based learning applied to document recogni-
tion. Proceedings of the IEEE, 86(11):2278–2324.
Moosavi-Dezfooli, S., Fawzi, A., and Frossard, P. (2015).
Deepfool: a simple and accurate method to fool deep
neural networks. CoRR, abs/1511.04599.
Sultana, F., Sufian, A., and Dutta, P. (2019). Advancements
in image classification using convolutional neural net-
work. CoRR, abs/1905.03288.
Szegedy, C., Zaremba, W., Sutskever, I., Bruna, J., Erhan,
D., Goodfellow, I., and Fergus, R. (2014). Intriguing
properties of neural networks.
Zhang, J., Harman, M., Ma, L., and Liu, Y. (2019). Machine
learning testing: Survey, landscapes and horizons.
Method for Improving Quality of Adversarial Examples
225
