
Aerial to Street View Image Translation using Cascaded Conditional
GANs
Kshitij Singh, Alexia Briassouli
a
and Mirela Popa
Department of Data Science and Knowledge Engineering, Maastricht University, The Netherlands
mirela.popa@maastrichtuniversity.nl
Keywords:
Cross View Image Translation, Conditional GANs, Semantic Segmentation, U-net.
Abstract:
Cross view image translation is a challenging case of viewpoint translation which involves generating the
street view image when the aerial view image is given and vice versa. As there is no overlap in the two
views, a single stage generation network fails to capture the complex scene structure of objects in these two
views. Our work aims to tackle the task of generating street level view images from aerial view images on
the benchmarking CVUSA dataset by a cascade pipeline consisting of three smaller stages: street view image
generation, semantic segmentation map generation, and image refinement, trained together in a constrained
manner in a Conditional GAN (CGAN) framework. Our contributions are twofold: (1) The first stage of our
pipeline examines the use of alternate architectures ResNet, ResUnet++ in a framework similar to the current
State-of-the-Art (SoA), leading to useful insights and comparable or improved results in some cases. (2) In
the 3rd stage, ResUNet++ is used for the first time for image refinement. U-net performs the best for street
view image generation and semantic map generation as a result of the skip connections between encoders and
decoders, while ResU-Net++ performs the best for image refinement because of the presence of the attention
module in the decoders. Qualitative and quantitative comparisons with existing methods show that our model
outperforms all others on the KL Divergence metric and ranks amongst the best for other metrics.
1 INTRODUCTION
The task of generating outdoor scenes from a variety
of viewpoints is a challenging one that is gaining a
lot of attention recently with applications in domains
like autonomous driving, virtual reality, geo-tagging
etc. Generation of a novel viewpoint involves trans-
forming objects in a scene from a given view to the
desired view in a natural setting, while maintaining
the photo-realism of the transformation.
Cross view image translation is a special case of
viewpoint translation, where the desired view has no
overlap with the given view (aerial to street or vice
versa). This is much more challenging due to occlu-
sion and the large degree of deformation while trans-
forming from one view to another. Moreover, when
transforming from aerial view to street view, there is
uncertainty in the orientation in which the street view
will be synthesized. Existing methods (Zhai et al.,
2017) (Regmi and Borji, 2018) (Tang et al., 2019)
show that a single stage image translation model fails
to transfer fine details of the objects. Thus, a multi
a
https://orcid.org/0000-0002-0545-3215
step process is needed, with image refinement after
street view image generation (Tang et al., 2019). A se-
mantic segmentation map generator, for comparison
with the ground truth semantic map, is added to the
multi-step process, to guide image generation. The
final pipeline consists of 3 steps, where a street view
image is first generated, and is then provided to image
refinement and semantic map generation networks.
Our work builds upon (Tang et al., 2019), investi-
gating which architectures are best suited for each of
the 3 steps/subtasks (street view image generation, se-
mantic map generation, and image refinement). Our
contributions are: (1) Stage 1 of our pipeline exam-
ines alternate SoA architectures ResNet, ResUnet++
in a framework similar to (Tang et al., 2019), leading
to useful insights and comparable or improved results.
(2) In stage 3, ResUNet++ is used for the first time for
image refinement.
Conditional GANs (CGAN), proven to be very ef-
fective in image translation (Isola et al., 2017), are
used as the framework for each step. In addition to
U-Net, which is the standard for image translation,
CGAN, ResNet and ResU-Net++ (Jha et al., 2019) are
372
Singh, K., Briassouli, A. and Popa, M.
Aerial to Street View Image Translation using Cascaded Conditional GANs.
DOI: 10.5220/0010814000003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
372-379
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

studied for their suitability in each subtask: they are
trained together in a constrained manner in a cascade
network framework, to study the effect of each one of
them in the final street view image generation process.
The investigation of these generators provides impor-
tant insights into the suitability of network features
like skip connections and attention for each subtask.
This paper is structured as follows. Sec. 2 presents
the background of this work, Sec. 3 provides details
on the architectures and methods used. Experiments
and results are presented in Sec. 4, with qualitative
and quantitative comparisons of the proposed pipeline
against existing methods. Finally, conclusions and
plans for future work are presented in Sec. 5.
2 BACKGROUND, RELATED
WORK
Conditional GANs (CGANs) (Mirza and Osindero,
2014) generate domain-specific images in a con-
trolled setting, so they have been used for image to
image translation (Isola et al., 2017), (Odena et al.,
2017), (Choi et al., 2018). In order to make the task
feasible, semantic segmentation maps of the opposite
view are provided to the CGAN generator network,
allowing the network to focus on reproducing color,
texture, and structure. (Regmi and Borji, 2018) pro-
posed X-Fork and X-Seq for cross view image trans-
lation, using CGANs. The SoA in this task is Se-
lectionGAN (Tang et al., 2019) which used CGAN,
similarly to (Regmi and Borji, 2018), but with multi
channel attention. This multi channel attention is
handcrafted to a certain extent, which potentially con-
strains its generalizability. Recently, (Toker et al.,
2021) introduced a novel multi-task architecture with
joint image synthesis and retrieval, achieving SoA
cross-view image based geo-localization.
We examine the following research aspects:
(1) how newer architectures perform in cascaded
CGANs, (2) how our system compares to the SoA on
quantitative metrics used in (Tang et al., 2019), (3) the
effect of adding tasks (like segmentation map gener-
ation, image refinement), while training concurrently
with cross view image synthesis, (4) the role of atten-
tion in image generation. We focus on street level
view generation when the corresponding top level
view is given as an input, which is more difficult than
the inverse (generating aerial level images from street
view), as it requires generating a view which has more
details using an input view which has fewer details.
Figure 1: Diagram of the pipeline. Dashed lines indicate the
different adversarial and L1 losses used to train the network.
3 METHODOLOGY
Motivation for the Chosen Pipeline: Objects in
aerial and street views have different dimensions and
orientation, leading to ambiguity when transferring
from one view to another. A single stage image to
image translation model cannot capture details, espe-
cially when the degree of overlap between the views
is small (as in our case). This issue is addressed by
using a cascade CGANs pipeline (Tang et al., 2019),
with 3 generators trained together in an adversarial
manner guided by pixel losses (Figure 1). The three
generators have different tasks, described below.
1. Generator 1 (coarse street view): This generator
deals with coarse street view image generation.
The aerial view and semantic segmentation map
of the street view are input and the network gen-
erates a coarse reconstruction of the street view.
2. Generator 2 (street view semantic map): This gen-
erator deals with street view semantic map gen-
eration. It takes the coarse street view (i.e output
of Generator 1) as input and generates the seman-
tic segmentation map of the street view.
3. Generator 3 (coarse to fine street view): This gen-
erator deals with the task of image refinement.
Similar to Generator 2, it takes the coarse street
view (i.e output of Generator 1) as input and gen-
erates a fine version of the street view. This re-
fined street level view is the final output.
Generator Architecture Choices:
U-Net: CGANs for image to image translation (Isola
et al., 2017) used U-Nets, as they share low level fea-
tures between the input and output views by skip con-
nections between layer i and layer n − i of the stan-
Aerial to Street View Image Translation using Cascaded Conditional GANs
373

dard encoder-decoder module. This is appropriate for
image to image translation, where input and output
images share low level features such as color, shape,
dimensions, orientation, etc. We use the implementa-
tion of U-Net by (Isola et al., 2017), which can also
be used with fewer filters for coarse image generation,
greatly reducing the number of parameters of the net-
work and saving on training time.
ResNet: Residual networks for image classification
(He et al., 2016) replaced the layers in the middle
of the network by blocks with skip connections, con-
necting alternate blocks. In our two image transla-
tion tasks (street view image generation and coarse to
fine image refinement) the input and output images
have high level of structural similarities, so we use
a ResNet style architecture. There are 3 blocks, each
downsampling by a factor of 2, so a 256x256 image is
downsampled to 64x64 with 256 channels. It is then
passed through 6 ResNet blocks, containing a convo-
lutional block that does not change the image dimen-
sions. Output from block i is added to output of block
i+1, which is then given as input to block i +2. After
the ResNet block, the image is passed to 3 upsampling
blocks to bring the output back to a 256x256 image.
ResU-Net++: ResU-Net++ (Jha et al., 2019) com-
bines key features of U-Net and ResNet. It has skip
connections between block i and block n − i simi-
lar to U-Net, and skip connections between consec-
utive blocks similar to ResNet. Attention has recently
been proven useful for image translation (Zhang et al.,
2019), (Kim et al., 2019), and is explored here in the
context of cross view image translation and coarse to
fine image refinement. ResU-Net++ has never been
used previously for image translation related tasks.
We examine it for our three subtasks, since U-Net and
ResNet have already proven to be effective for image
related tasks using CGAN, and its inclusion of atten-
tion is expected to show promising results.
PatchGAN Discriminator: (Pathak et al., 2016) in-
troduced pixel loss (L1 or L2) in addition to adver-
sarial GAN loss. We use L1 loss, as it leads to less
blurring than L1/L2 (Zhao et al., 2016), (Larsen et al.,
2016). (Isola et al., 2017) argued that L1 loss captures
low, but fails to capture high frequencies, so we use a
70x70 PatchGAN discriminator, which has gives the
sharpest images both in spatial and spectral domains.
Loss Function Formulation: In CGANs, both the
discriminator and generator receive the conditioning
variable (aerial view image in this case). For the dis-
criminator, we first construct fake sample pairs using
the aerial view and the street view from the generator,
pass this through the discriminator, and calculate the
loss based on the prediction by the discriminator (2nd
component in Eqs 1, 2). Next,we do the same with
real sample pairs (aerial view and ground truth street
view) (1st component in Eqs 1, 2). The discrimina-
tor’s combined adversarial loss L
adv1
for identifying
generated coarse street view (I
g
0
) from ground truth
street view(I
g
) is the sum of these two:
L
adv1
= min
G
max
D
L
cGAN
(G, D
1
) =
E
I
a
,I
g
[logD(I
a
, I
g
)] + E
I
a
,I
g
0
[log(1 − D(I
a
, I
g
0
))]
(1)
The discriminator adversarial loss L
adv2
for the re-
fined generated street view image (I
g
00
) is:
L
adv2
= min
G
max
D
L
cGAN
(G, D
2
) =
E
I
a
,I
g
[logD(I
a
, I
g
)] + E
I
a
,I
g
00
[log(1 − D(I
a
, I
g
00
))]
(2)
L1 Loss: Each of the 3 generators produces an image
which is compared to the ground truth with L1 loss.
Between the coarse (I
g
0
) and ground truth street
view image (I
g
):
L1
gen1
= min
G
L1(G) = E
I
g
,I
g
0
[||I
g
− I
g
0
||
1
] (3)
Between the generated semantic map (I
s
0
) and ground
truth semantic map of street view (I
s
):
L1
gen2
= min
G
L1(G) = E
I
s
,I
s
0
[||I
s
− I
s
0
||
1
] (4)
Between the refined (I
g
00
) and ground truth street view
image(I
g
):
L1
gen3
= min
G
L1(G) = E
I
g
,I
g
00
[||I
g
− I
g
00
||
1
] (5)
The total L1 loss is then defined as:
L
L1
= min
G
(L1
gen1
+ L1
gen2
+ L1
gen3
) (6)
Overall Loss: The Overall Loss is the weighted sum
of the adversarial and L1 loss. The weighting factors
λ
1
and λ
2
are hyper-parameters which can be tuned.
min
G
max
D
L = L
adv1
+ λ
1
L
adv2
+ λ
2
L
L1
(7)
Selecting λ
1
and λ
2
: In Eq. 7, regularization term
λ
1
denotes the importance of reducing the adversarial
loss in coarse to fine image refinement, in comparison
to coarse street view generation. Higher values indi-
cate that discriminating the refined street view from
the ground truth is more difficult than discriminating
the coarse view, so λ
1
> 1 seems logical. Experiments
for λ
1
= 0.5, 1, 5, 10 showed λ
1
= 5 to be optimum.
λ
2
is the regularization term for reducing L1 loss
compared to the other terms in the overall loss. (Isola
et al., 2017) observed that, for image to image transla-
tion, the discriminator trains faster than the generator
(i.e it can identify fake images before the generator
can keep up with generating realistic images and thus
fails to train efficiently). Also, color is a very impor-
tant in image translatio,n especially during viewpoint
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
374

translation where objects in the scene (mountains, sky
etc) have a narrow range of realistic spectral values for
humans. This motivates using to a high value of λ
2
(λ
2
= 10). For cross view image translation, (Regmi
and Borji, 2018) found it should be even higher and
used λ
2
= 100 which is also used here. Tests using
higher or lower values of λ
2
validated this choice.
Network Training: In order to optimize the network,
we perform gradient descent on the discriminator and
the generator alternatively. We first train the discrim-
inator and update weights via backpropagation, keep-
ing the 3 generators fixed. Then we fix the discrimi-
nator weights, train the 3 generators and update their
weights via backpropagation. The process is end-to-
end and continues for 30 epochs. Similarly to (Regmi
and Borji, 2018) and (Tang et al., 2019), an Adam op-
timizer is used for both discriminator and generator
training with initial learning rate = 0.0002 and mo-
ment parameters β
1
= 0.5 and β
2
= 0.999. For each
epoch, the intermediate model is saved so results can
be compared and progress can be monitored.
4 EXPERIMENTS, RESULTS
Dataset: The dataset used is Crossview USA
(CVUSA) (Workman et al., 2015), with millions of
pairs of aerial images obtained from Bing Maps and
ground-level images from Google Street view. For
our task of cross view image translation, we use a
subset of CVUSA created by (Zhai et al., 2017), with
35,552 training and 8,884 testing tuples. This exact
split and distribution of images is used to compare our
results with the SoA. The semantic segmentation map
of the ground-level view is included with the aerial
and ground-level images, to guide the image genera-
tion process. As shown in Figure 2, a sample image
consists of a tuple (aerial view, street view, semantic
segmentation of street view). The resolution is 768
X 256 (i.e each image in the tuple has a resolution of
256 X 256). In order to train the model, they have to
be cropped and converted into separate paired images.
Figure 2: The entire image is divided into 3 windows of
equal width and height (256x256) showing different views
of the same place.
In this dataset, the street level views are consistent
in attributes like height from the ground and direction,
so the network can learn to generate street level im-
ages for this consistent set of attribute values. There-
fore data augmentation techniques like flipping, rota-
tion etc are not applied, as they would change the di-
rection attribute, breaking the consistency. However,
all existing methods for this task using this dataset
perform random cropping from 256x256 to 224x224
and then resizing back to 256x256. Since we want to
compare the performance of our proposed model with
the SoA, we applied this cropping and resizing.
Qualitative Evaluation of Generated Images: In
order to visually assess the performance of the gen-
erator in GANs for photo-realistic images of a view-
point we visually assess structure, color, and textures.
Quantitative Evaluation of Generated Images:
Qualitative assessment is subjective, time consuming
and labor intensive, so the quantitative metrics are
also measured. They are also used in the SoA, al-
lowing us to quantitatively compare our results to it.
Pixel Level Similarity Measures: Peak Signal to
Noise Ratio (PSNR) between a reconstructed and in-
put view: high PSNR indicates better reconstruction.
Sharpness Difference (SD), for loss in sharpness dur-
ing viewpoint reconstruction. Structural-Similarity
(SSIM), between the ground truth and generated im-
age based on structure, luminance, and contrast. A
higher value of SSIM indicates higher similarity.
High Level Feature Similarity Measures: Incep-
tion Score (IS), to evaluate the diversity of a generated
image within a class while simultaneously being rep-
resentative of that class. We use AlexNet(Krizhevsky
et al., 2012) trained on Places (Zhou et al., 2017) with
365 categories, as in (Regmi and Borji, 2018). Then
we calculate the probability of the generated street
view image belonging to each class, for Top-1 and
Top-5 Inception Scores. Kullback-Leibler divergence
(KL) is also used. The probability distribution is cal-
culated by passing the image through the pre-trained
model used for the IS calculation.
Figure 3: Generated semantic segmentation vs ground truth.
Architecture Selection: U-Net performs extremely
well in the semantic segmentation of Generator 2
(Figure 3). Generator 2 generates a semantic segmen-
tation map of the street view, trained using a L1 loss
and added to the overall loss of the generator to help
Aerial to Street View Image Translation using Cascaded Conditional GANs
375

the other two generators train faster.
Semantic segmentation is only used for loss guid-
ance, while the other two generators actually produce
street level views, so we fix the architecture of Gen-
erator 2 as U-Net, reducing the number of configu-
rations to be tried from 27 to 9. The 9 configura-
tions, with U-Net as Generator 2, contain the follow-
ing combinations for Generators 1 and 3 (G1, G3): (a)
U-Net, U-Net, (b) U-Net, ResNet, (c) U-Net, ResU-
Net++, (d) ResNet, U-Net, (e) ResNet, ResNet, (f)
ResNet, ResU-Net++, (g) ResU-Net++, U-Net, (h)
ResU-Net++, ResNet, (i) ResU-Net++, ResU-Net++.
Figure 4: Ground truth image; Left window is the aerial
view and the right window is the street view.
Figure 5: Generated refined street view for models (a)-(i).
Figure 5 shows the generated street view of these
configurations for the ground truth image in Figure 4.
Some observations on our results are listed below.
1. The color reproduction of all the tried configura-
tion seems to be accurate compared to the ground
truth. This shows that the L1 loss works well.
2. ResNet performs poorly as G1, which deals with
coarse street views, i.e. structure. ResNet lacks
skip connections between encoder and decoder
(unlike U-Net, ResU-Net++), which are important
for structure in viewpoint translation (Isola et al.,
2017). The quality of images generated in G3 is
Table 1: High level feature qualitative metrics for the 9 con-
figurations (except for KL Div., higher is better).
Accuracy(%) Inception Score
Top 1 Top 5 All Top 1 Top 5 KL Div.
(a) 50.45 79.84 3.33 2.38 3.58 4.98 ± 1.25
(b) 47.29 75.92 3.23 2.30 3.47 9.87 ± 1.60
(c) 58.23 87.91 3.76 2.67 3.89 2.84 ± 0.93
(d) 31.82 57.65 3.16 2.28 3.36 14.09 ± 1.65
(e) 25.65 54.32 3.09 2.12 3.23 17.61 ± 1.63
(f) 33.21 62.39 3.13 2.22 3.26 13.29 ± 1.66
(g) 57.49 88.51 3.32 2.39 3.449 6.27 ± 1.52
(h) 49.45 77.49 3.29 2.29 3.32 8.27 ± 1.56
(i) 55.06 85.23 3.58 2.54 3.66 3.55 ± 1.05
also lower, hence, ResNet is not ideal for view-
point translation or image refinement.
3. Best Configuration, Role of Attention: The best
results are in (c) (Generator 1: U-Net Generator
3: ResU-Net++) and (i) (Generator 1: ResU-
Net++ Generator 3: ResU-Net++), so they are
evaluated quantitatively. ResU-Net++ has skip
connections between encoders and decoders with
an attention module in the decoders. Attention
improves the ability of the network to convert
coarse generated images into finer grained by fo-
cusing on relevant parts of the image.
4. The output using configuration (g) has structure
and details comparable to the other 2 selected
configurations. However, on closer inspection on
multiple test images, it seems it introduces ran-
dom brightly colored artifacts (Figure 6).
Figure 6: Artifacts with G1: ResU-Net++, G3: U-Net.
Quantitative Assessment of Generated Images: Ta-
bles 1 and 2 show quantitative results for all 9 config-
urations. The two configurations with the best quali-
tative results also show the best quantitative results.
Configuration (g) had some comparable/better met-
rics (Top-5 accuracy and SD), but introduces artifacts
(Figure 6), so we do not examine it further.
Table 2: Pixel level qualitative metrics of the configurations.
PSNR SSIM SD
(a) 21.549 0.479 18.707
(b) 21.267 0.469 18.732
(c) 22.355 0.509 19.459
(d) 19.728 0.456 17.170
(e) 18.521 0.428 16.091
(f) 19.853 0.449 17.670
(g) 20.473 0.483 19.893
(h) 21.161 0.474 18.876
(i) 21.769 0.498 19.482
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
376
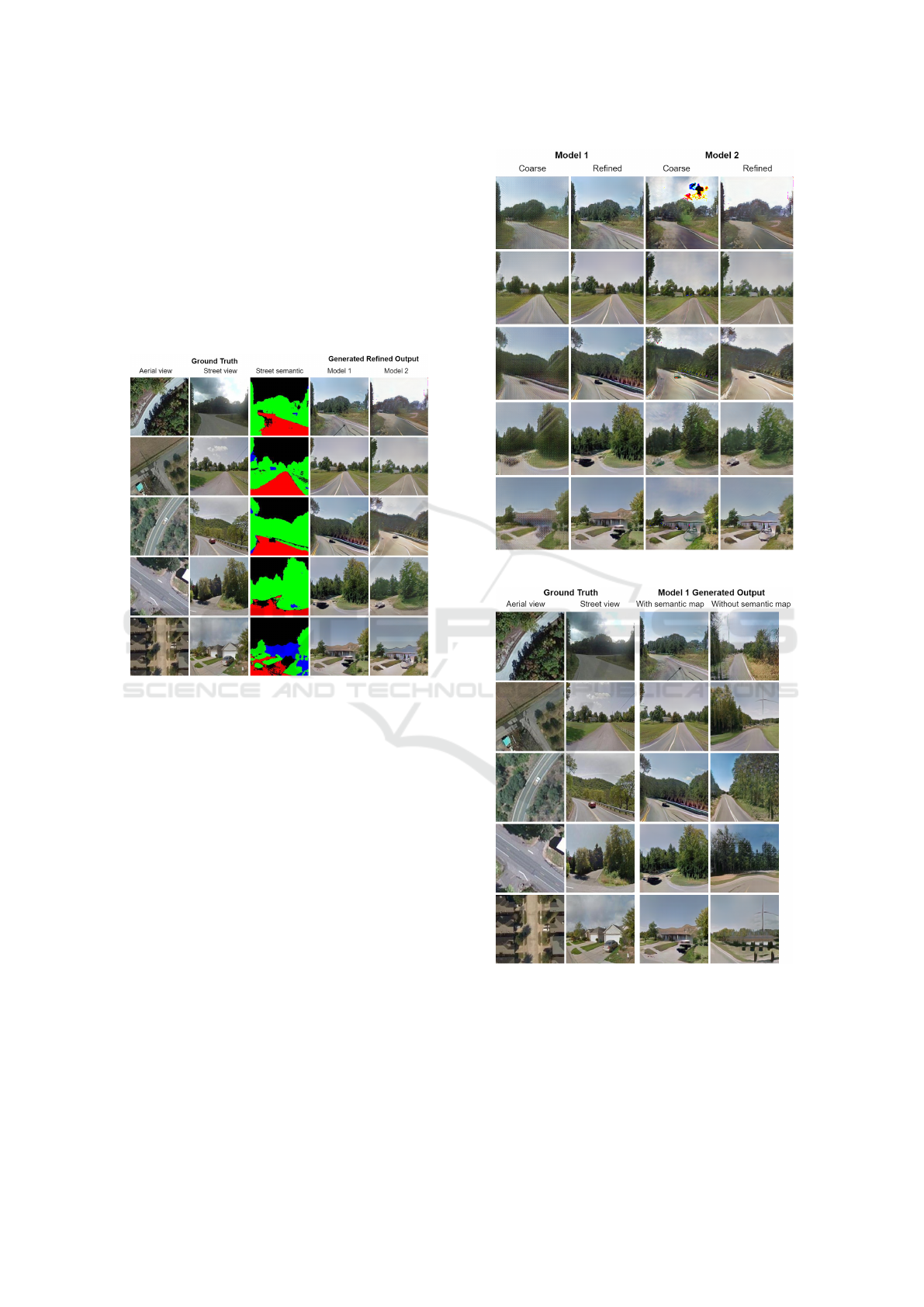
The Two Best Configurations: As seen from the
qualitative and quantitative assessment, configuration
(c), which we will call Model 1, (U-Net, ResU-
Net++) and configuration (i), which we will call
Model 2 (ResU-Net++, ResU-Net++) give the best
street view transformation image. Figure 7 shows
the generated refined street views for both models are
similar to the ground truth for different test samples,
encompassing various viewpoints. The semantic map
provided is not detailed, so some inaccuracies in it
carry over to the generated street view images.
Figure 7: Model 1, 2 refined generated street view.
Coarse vs Refined: We first generate a coarse in-
termediate image with Generator 1 and refine it with
Generator 3. Figure 8 shows the coarse output for
Model 1 lacks detail compared to Model 2. This can
be attributed to the fact that for Generator 1, Model 1
uses U-Net and Model 2 uses ResU-Net++, the latter
being more complex, despite having fewer parame-
ters. For Model 2, the coarse image displays the same
artifacts that appeared in the refined image of con-
figuration (g), but are mostly resolved in the refined
image when using Model 2, while adding a few de-
tails. Model 1 on the other hand recovers more details
in the image refinement process resulting in a starker
difference between the coarse and refined images.
In conclusion, the refined output of Model 1 is
slightly better than Model 2, so Model 1 (G1: U-Net,
G2: U-Net, G3: ResU-Net++) is our final chosen
model. However, it should be noted that the coarse in-
termediate output of Model 2 (G1: ResU-Net++, G2:
U-Net, G3: ResU-Net++) shows promising results, so
there is a room for further improvement if a suitable
image refinement process can be designed for it.
Figure 8: Model 1, 2 coarse vs refined street view.
Figure 9: Comparison of refined street view generated for
Model 1 with and without semantic segmentation map.
Removing Semantic Guidance: We investigate the
effects of removing semantic segmentation from the
input, to obtain insights into the limitations of this
task. In Figure 9, we observe that we usually ob-
tain photo-realistic images (or parts that are photo-
Aerial to Street View Image Translation using Cascaded Conditional GANs
377
realistic) of the street view even when semantic maps
are not used. This shows the model learns to generate
the structure of objects in the street, although there re-
mains a significant difference when compared to the
ground truth, as there is no way of knowing the ex-
act dimensions of the objects (e.g. the height of trees
or the design of the windows/doors of houses). How-
ever, there are still some improvements that can be
made with regards to the general layout of the objects.
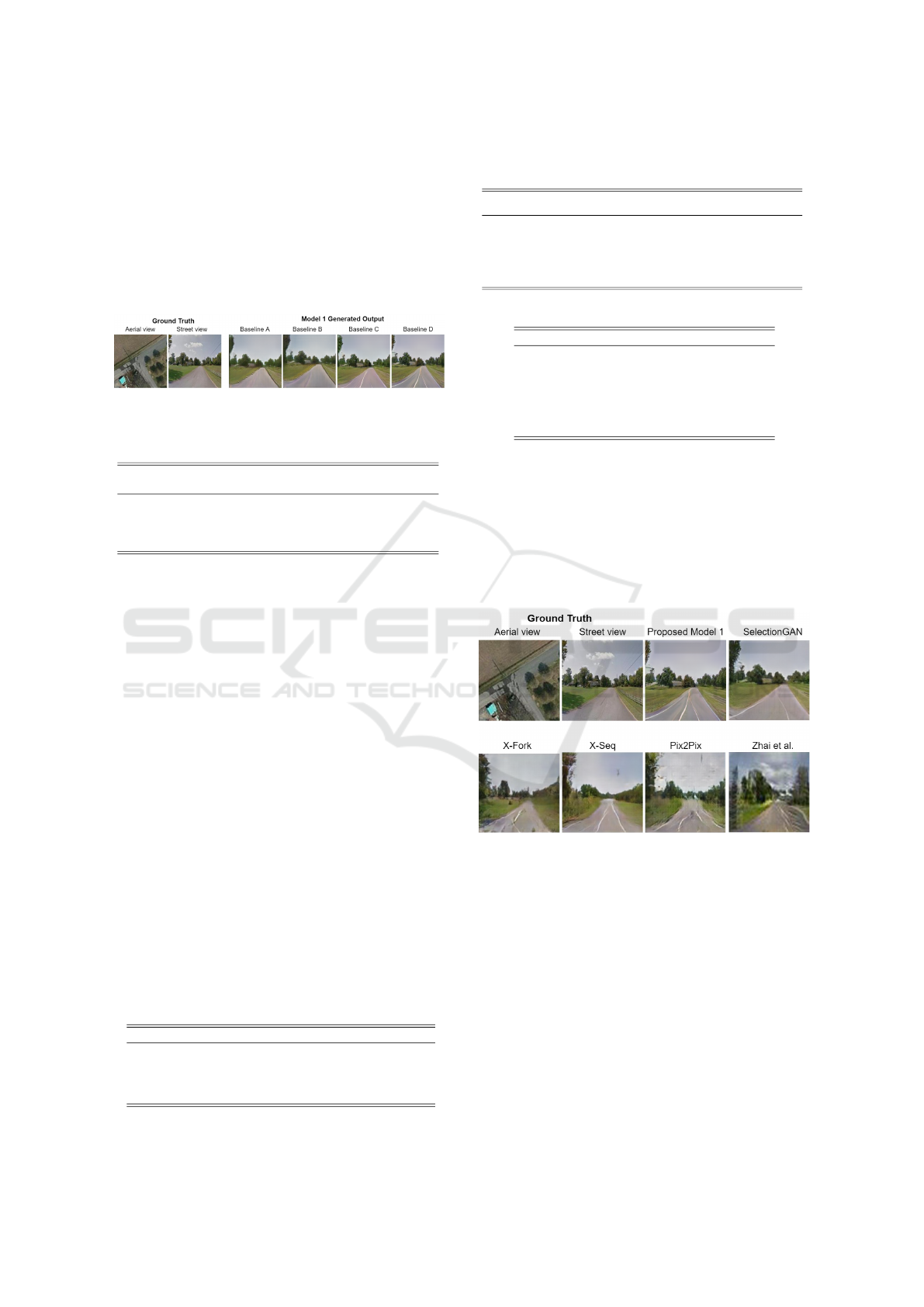
Figure 10: Ablation study: Comparison of 4 baselines.
Table 3: High level feature qualitative metrics for ablation
study (except for KL Div., higher is better).
Accuracy(%) Inception Score
Top 1 Top 5 All Top 1 Top 5 KL Div.
A 44.18 81.50 3.12 2.28 3.25 9.47 ± 1.83
B 44.91 82.98 3.17 2.33 3.29 9.11 ± 1.85
C 57.44 87.17 3.70 2.64 3.79 3.59 ± 1.13
D 58.23 87.91 3.76 2.67 3.89 2.84 ± 0.93
Ablation Study: We perform an ablation study to see
how each of the networks in the pipeline affects the
quality of images generated, and their qualitative and
quantitative relative importance. We compare 4 base-
lines: Baseline A uses G1. Baseline B uses G1 and
G2. Baseline C uses G1 and G3. Baseline D uses all
3 generators. From the results of the ablation study
(Figure 10, Tables 3, 4), it can be said that Baselines
A and B are similar to each other, B being slightly
higher. When compared to Baseline C, it can be said
that even though the addition of semantic segmenta-
tion generator in the pipeline (Baseline B) improves
performance, the impact is not as significant as Base-
line C, where the coarse to fine image refinement is
added to coarse street view generation. Baseline C
and Baseline D metrics are quite similar and much
better than Baseline A and B. This again emphasizes
the importance of image refinement in this pipeline.
Comparison with SoA: In this section, we compare
the results from Model 1 and Model 2 with existing
methods: SelectionGAN (Tang et al., 2019), X-Fork
and X-Seq (Regmi and Borji, 2018), Zhai et al(Zhai
et al., 2017), Pix2Pix (Isola et al., 2017).
Table 4: Pixel level qualitative metrics for ablation study.
Baseline (Generators used) PSNR SSIM SD
A (1) 21.098 0.456 18.809
B (1 and 2) 21.032 0.461 19.016
C (1 and 3) 22.090 0.498 19.312
D (All 3) 22.355 0.509 19.459
Table 5: High level feature metrics for existing methods
(except for KL Div., higher is better).
Accuracy(%) Inception Score
Top 1 Top 5 All Top 1 Top 5 KL Div.
Pix2Pix 41.87 72.87 3.26 2.42 3.51 9.47 ± 1.69
Zhai et al. 14.03 52.29 1.84 1.52 1.87 27.43 ± 1.63
X-Fork 49.65 81.16 3.38 2.54 3.57 7.18 ± 1.56
X-Seq 54.61 83.46 3.82 2.67 4.01 5.19 ± 1.31
SelGAN 65.51 89.66 3.81 2.72 3.92 2.96 ± 0.97
Our Model 1 58.23 87.91 3.76 2.67 3.89 2.84 ± 0.93
Table 6: Pixel level metrics for existing methods.
Method PSNR SSIM SD
Pix2Pix 21.57 0.46 18.90
Zhai et al. 17.49 0.42 16.62
X-Fork 21.65 0.48 18.99
X-Seq 21.67 0.47 18.99
SelectionGAN 23.15 0.53 19.61
Proposed Model 1 22.36 0.51 19.46
Quantitative Comparison: When compared to ex-
isting methods on quantitative metrics, in Tables 5
and 6, it can be seen that our Model 1 outperforms
all models except SelectionGAN on all metrics (the
only exception is Inception Score for which it is worse
than X-Seq). When compared to SelectionGAN, our
proposed Model 1 has comparable performance on all
metrics, and beats SelectionGAN in KL Divergence.
Figure 11: Comparison of our Model 1 with SoA methods.
Qualitative Comparison: In Figure 11 we qualita-
tively compare the results of Model 1 with existing
methods for a test image. The output images of the
other models are taken from the (Tang et al., 2019)
paper, so it is not fair to compare image resolution,
but only structure. We see that our model performs
comparably well to the SoA SelectionGAN, maintain-
ing the structure of objects. The other models do not
maintain structure that well, and produce significant
distortion, or miss some objects in the scene com-
pletely (for example the house in the background).
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
378

5 CONCLUSIONS, FUTURE
WORK
In this paper we examine cross view image transla-
tion, generating a street view from the correspond-
ing aerial view using a cascade pipeline, where coarse
street view image generation, semantic segmentation,
and image refinement, are combined and trained to-
gether . We tested SoA generator models U-Net,
ResNet, and ResU-Net++ and found best results were
obtained for the configuration (Generator 1: U-Net,
Generator 2: ResNet, Generator 3: ResU-Net++).
This demonstrates the importance of sjkip connec-
tions for street view generation and of attention for
image refinement. The role of each of the 3 subtasks
in the pipeline was studied and it was concluded that
each subtask improved overall performance qualita-
tively and quantitatively. Future work includes inves-
tigating appropriate networks for further refinement
of the output images to address artifacts related to per-
spective projection, and how to incorporate varying
sources of input data (such as aerial input data from
drones at varying heights, or video input).
REFERENCES
Choi, Y., Choi, M., Kim, M., Ha, J.-W., Kim, S., and Choo,
J. (2018). Stargan: Unified generative adversarial net-
works for multi-domain image-to-image translation.
In Proceedings of the IEEE conference on computer
vision and pattern recognition, pages 8789–8797.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Isola, P., Zhu, J.-Y., Zhou, T., and Efros, A. A. (2017).
Image-to-image translation with conditional adversar-
ial networks. In Proceedings of the IEEE conference
on computer vision and pattern recognition, pages
1125–1134.
Jha, D., Smedsrud, P. H., Riegler, M. A., Johansen, D.,
De Lange, T., Halvorsen, P., and Johansen, H. D.
(2019). Resunet++: An advanced architecture for
medical image segmentation. In 2019 IEEE Interna-
tional Symposium on Multimedia (ISM), pages 225–
2255. IEEE.
Kim, J., Kim, M., Kang, H., and Lee, K. (2019). U-gat-
it: Unsupervised generative attentional networks with
adaptive layer-instance normalization for image-to-
image translation. arXiv preprint arXiv:1907.10830.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. Advances in neural information processing
systems, 25:1097–1105.
Larsen, A. B. L., Sønderby, S. K., Larochelle, H., and
Winther, O. (2016). Autoencoding beyond pixels
using a learned similarity metric. In International
conference on machine learning, pages 1558–1566.
PMLR.
Mirza, M. and Osindero, S. (2014). Conditional generative
adversarial nets. arXiv preprint arXiv:1411.1784.
Odena, A., Olah, C., and Shlens, J. (2017). Conditional
image synthesis with auxiliary classifier gans. In In-
ternational conference on machine learning, pages
2642–2651. PMLR.
Pathak, D., Krahenbuhl, P., Donahue, J., Darrell, T., and
Efros, A. A. (2016). Context encoders: Feature learn-
ing by inpainting. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2536–2544.
Regmi, K. and Borji, A. (2018). Cross-view image synthe-
sis using conditional gans. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 3501–3510.
Tang, H., Xu, D., Sebe, N., Wang, Y., Corso, J. J., and
Yan, Y. (2019). Multi-channel attention selection gan
with cascaded semantic guidance for cross-view im-
age translation. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 2417–2426.
Toker, A., Zhou, Q., Maximov, M., and Leal-Taixe, L.
(2021). Coming down to earth: Satellite-to-street view
synthesis for geo-localization. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 6488–6497.
Workman, S., Souvenir, R., and Jacobs, N. (2015). Wide-
area image geolocalization with aerial reference im-
agery. In Proceedings of the IEEE International Con-
ference on Computer Vision, pages 3961–3969.
Zhai, M., Bessinger, Z., Workman, S., and Jacobs, N.
(2017). Predicting ground-level scene layout from
aerial imagery. In Proceedings of the IEEE Confer-
ence on Computer Vision and Pattern Recognition,
pages 867–875.
Zhang, H., Goodfellow, I., Metaxas, D., and Odena, A.
(2019). Self-attention generative adversarial net-
works. In International conference on machine learn-
ing, pages 7354–7363. PMLR.
Zhao, H., Gallo, O., Frosio, I., and Kautz, J. (2016).
Loss functions for image restoration with neural net-
works. IEEE Transactions on computational imaging,
3(1):47–57.
Zhou, B., Lapedriza, A., Khosla, A., Oliva, A., and Tor-
ralba, A. (2017). Places: A 10 million image database
for scene recognition. IEEE transactions on pattern
analysis and machine intelligence, 40(6):1452–1464.
Aerial to Street View Image Translation using Cascaded Conditional GANs
379
