
Machine-learned Behaviour Models for a Distributed Behaviour
Repository
Alexander Jahl, Harun Baraki, Stefan Jakob, Malte Fax and Kurt Geihs
Distributed Systems Department, University of Kassel, Wilhelmsh
¨
oher Allee, Kassel, Germany
Keywords:
Multi-agent Systems, Autonomous Systems, Self Organizing Systems, Agent Models and Architectures, Task
Planning and Execution.
Abstract:
Dynamically organised multi-agent systems that consist of heterogeneous participants require cooperation to
fulfil complex tasks. Such tasks are commonly subdivided into subtasks that have to be executed by indi-
vidual agents. The necessary teamwork demands coordination of the involved team members. In contrast to
typical approaches like agent-centric and organisation-centric views, our solution is based on the task-centric
view and thus contains active task components which select agents focusing on their Skills. It enables an
encapsulated description of the task flow and its requirements including team cooperation, organisation, and
location-independent allocation processes. Besides agent properties that represent syntactical and semantic in-
formation, agent behaviours are considered as well. The main contributions of this paper are hyperplane-based
machine-learned Behaviour Models that are generated to capture the behaviour and consider the Behaviour
Implementations as black boxes. These Behaviour Models are provided by a distributed behaviour repository
that enables tasks to actively select fitting Behaviour Implementations. We evaluated our approach based on
agents playing chessboard-like games autonomously.
1 INTRODUCTION
Multi-agent systems may consist of heterogeneous
agents that act autonomously in their environment.
They are equipped with various actuators, sensors,
and executable routines which all can be represented
by software or hardware components. Such rou-
tines are software programs that are performed at
runtime, thus termed as runtime behaviours. While
simple tasks are executed by single agents with ap-
propriate hardware and runtime behaviours, complex
tasks can be thought as workflows of subtasks. Thus,
they ask for cooperation and coordination of several
agents. Typical concepts which address this issue ap-
ply either the agent-centric or the organisation-centric
viewpoint (Picard et al., 2009). In the case of the
agent-centric view, an explicit definition of the work-
flow is neither given to the agents nor a central entity.
Instead, the coordination mechanisms are embed-
ded into subtasks which are performed by assigned
agents. In contrast, the organisation-centric view ap-
plies predefined roles and coordination structures that
are either part of the knowledge of each agent or man-
aged by a central coordinator. In (Jahl et al., 2021),
we introduce the task-centric view, which is employed
in this work. In contrast to the previous views, this
view considers a task as a separate active component
that proactively searches for an executing unit that is
able to fulfil its requirements. A unit may represent
pure software as well as physical agents. Anyhow a
unit can be any interactive software component with
well-defined interfaces such as a microservice or a
shell to command devices. Since the management of
tasks and the executing units are separated and not
predefined, neither any structural specification nor a
set of tasks has to be provided at start time. Tasks may
emerge at run time and executing units are not tailored
to specific tasks only. In the case of a given structural
specification, our approach maps to the organisation-
centric view. If the set of tasks is predefined and the
allocation of executing units is unique, our approach
resembles the agent-centric view.
In our task-centric view, a complex task is de-
scribed by a plan that is not active. Instead, it pro-
vides restrictions for the active tasks, which include
minimum and maximum cardinalities of executed in-
stances and the required capabilities to perform its
contained tasks. Furthermore, tasks in a plan can de-
pend on further plans, such that a hierarchical man-
agement is achieved. In Figure 1, Task
1
is linked
188
Jahl, A., Baraki, H., Jakob, S., Fax, M. and Geihs, K.
Machine-learned Behaviour Models for a Distributed Behaviour Repository.
DOI: 10.5220/0010804000003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 1, pages 188-199
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
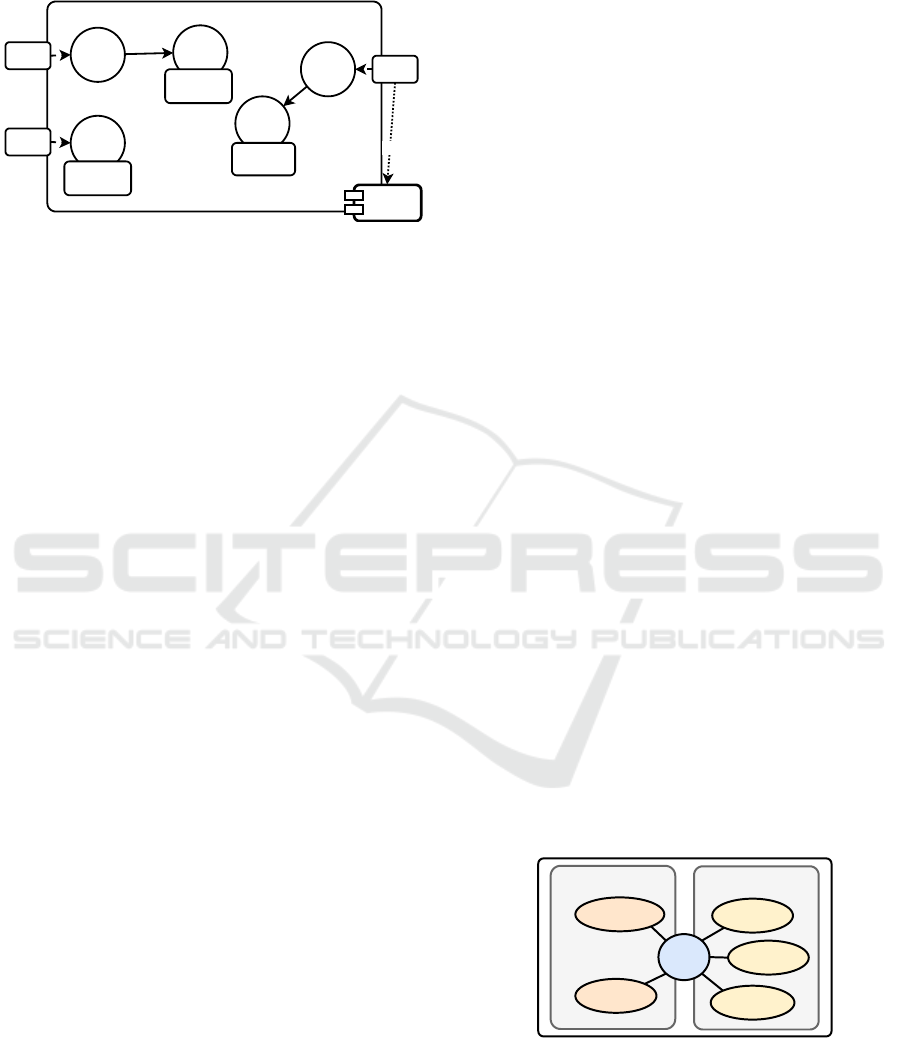
to the additional Plan
1
whose tasks have to be exe-
cuted first. Initially, a plan is submitted to an arbi-
Plan
0
Task
0
Task
1
State
0
State
2
State
1
State
3
Plan
1
Behaviour
A
Behaviour
B
Task
2
State
4
Behaviour
C
depends
Figure 1: Hierarchical plan structure.
trary unit of the multi-agent system, which extracts
the tasks and annotates them with plan information.
Subsequently, the extracted tasks start their search for
a fitting unit. If a unit is selected, the task enters the
initial state. A state change occurs in case a transition
condition is met. States can be equipped with runtime
behaviours. Behaviour implementations are encapsu-
lated domain-specific software routines. We consider
them as black boxes that provide their functionalities
through interfaces described in YAML syntax and de-
noted as Behaviour. Depending on the task and the
fitting unit, different behaviour implementations may
perform better or worse. To ensure the best possible
execution, a mechanism to select an appropriate im-
plementation is required.
The main contribution of this work are self-
optimising tasks that may iteratively improve their
performance by capturing, sharing, searching, and
applying different behaviour implementations. A
straightforward solution would apply a registry that
maps Behaviours to available behaviour implementa-
tions. However, relying only on interface informa-
tion may lead to several issues. Interfaces comprise
structural information that restricts data types for in-
put and output and function names. Choosing alter-
native behaviour implementations by only constrain-
ing interface structures could result in misinterpreta-
tions of data types and operations. For example, a
returned floating-point number might hold a temper-
ature in Fahrenheit, Celsius, or Kelvin. In this situ-
ation, developers may provide semantic annotations.
However, semantics-based approaches rely on anno-
tations by developers and a common top-level ontol-
ogy. This shifts the burden towards the developers.
Moreover, it requires their willingness to agree on and
adhere to a common ontology. Furthermore, these
annotations may be incomplete and outdated. Our
solution contains machine-learned behaviour models
based on a black-box view. We apply machine learn-
ing algorithms to gain abstraction of the transforma-
tions of input and output data. The resulting machine-
learned models represent the behaviour implementa-
tion. This enables tasks to detect the degree of simi-
larity between behaviour implementations.
The remainder of this paper is structured as fol-
lows. Section 2 introduces the formal definition of our
Skill concept. Section 3 describes the applied classi-
fication mechanisms and the architecture of our Dis-
tributed Behaviour Repository. In Section 4 we out-
line firstly an application scenario and our multi-agent
framework that is used for the implementation and
subsequently in the evaluation. Related work is pre-
sented in Section 5. Finally, the main contribution of
this paper is summarised and concluded in Section 6.
2 UNIT-SKILL-TASK CONCEPT
In our task-centric view (Jahl et al., 2021), a Skill Unit
is defined as an abstract representation of an agent in-
cluding its specific skills. Skill Units are allocated
to Tasks. The definition of a Skill Unit is formed by
combining one or more Primitive and Complex Skills.
These can be added, removed or altered at runtime.
Thus, the set of Skills can be dynamically adapted
to changing environments. Furthermore, subdividing
the Skills into different types supports the maintain-
ability and enables a more precise mapping of the dif-
ferent properties of a unit as well as the separation
of meta information from concrete callable software
routines.
To formalise this, we define a Skill Unit u as a
tuple of an agent a and a set of Skills:
u = (a, S
u
) where
S
u
= {s
1
, ..., s
i
} with s ∈ S
p
∪ S
c
(1)
The set of Skills encompasses two distinct Skill types.
Figure 2 illustrates the Skill concept of both Skill
types.
Complex Skills Primitive Skills
Characteristic
Behaviour
Action
Perception
Capability
Skill
Figure 2: Skill classification.
Primitive Skills. The first type are Primitive Skills
S
p
which contain set of characteristics s
ch
and capa-
bilities s
cap
:
S
p
= {s
p
1
, ..., s
p
n
} (2)
Machine-learned Behaviour Models for a Distributed Behaviour Repository
189

Characteristics s
ch
= (key , value) comprise inher-
ent properties like number of CPU cores, capacity
of storage, memory size and additionally environ-
mental information like the location.
Capabilities s
cap
= (string) represent semantic in-
formation about Complex Skills of an agent, such
as canMove, canSend, canReceive.
Complex Skills. The second type are Complex
Skills S
c
which include set of runtime behaviours s
b
,
actions s
a
, and perceptions s
e
.
S
c
= {s
c
1
, ..., s
c
n
} (3)
Actions s
a
= act(V) with V = {v
1
, ..., v
n
}, describe
simple functions passing a set V of values v
x
as
parameters.
Perceptions s
e
= perc(E) with E = {e
1
, ..., e
n
} that
is a set of environmental perceptions provided by
the sensors of the agent.
Behaviours s
b
are linked to Capabilities and contain
the definition of an interface, which comprises
the key commands start, stop, terminate, and Ac-
tions and Perceptions calls. Furthermore, a State
Graph G
s
and a model representation M can be
included.
s
b
= (S
x
, G
s
, M)
S
x
= {s
1
, ..., s
n
} with s ∈ S
cap
∪ S
e
∪ S
a
(4)
Active Tasks. Finally, a Plan p includes a set of
Tasks T . Each Task t is defined as a tuple of a State
Graph G
s
and a set of required Skills S
r
. A State
Graph represents a tree of finite state machines.
t = (G
s
, S
r
)
S
r
= {s
r
| s
r
∈ S
p
∪ S
c
} (5)
In order to execute the Task, the preconditions formed
by the required Skill set S
r
have to be fulfilled.
3 RUNTIME BEHAVIOURS
Runtime behaviours are combinations of Behaviours
and Behaviour Implementations. While Behaviours
represent syntactic and semantical descriptions of
the interface, Behaviour Implementations encapsulate
domain-specific software routines.
3.1 Behaviours
As mentioned in the introduction, the tasks with their
annotated plan information are submitted to an arbi-
trary Skill Unit in the system. Subsequently, the tasks
are extracted and start their search for a fitting Skill
Unit. In order to find a suitable unit, the task trans-
lates their descriptions of the Behaviour, which en-
capsulate Primitive and Complex Skills into a logic
program. The descriptions are defined in YAML syn-
tax by default. An example is shown in Listing 1.
1 requirements:
2 action:
3 name: "storeData"
4 parameter: list
5 returnType: string
6 ...
7 characteristic:
8 name: "storeCapacity"
9 value: 20
10 valueType: integer
11 ...
Listing 1: Skill Unit YAML description.
The Listing contains an action and a characteristic as
requirements for the task. For example the action
storeData has a list as parameter and a string
as return value. The characteristic is modelled in an
analogous way. YAML is a standard solution for an
efficient description of knowledge in a readable form.
However, it does not provide any reasoning support
to match the required Skills of the tasks with the
provided Skills of the current Skill Unit. A suitable
knowledge representation and reasoning formalism is
Answer Set Programming (ASP) (Gebser et al., 2012).
ASP provides non-monotonic reasoning and supports
the definition of defaults. An ASP program consists
of rules that are divided into two parts which are the
head and the body and are separated by the deduction
symbol :-. In general, the head of a rule is derived if
all literals of the body holds. A literal is a statement
that can be true or false. Furthermore, a rule without a
body is considered as a fact since it is unconditionally
true.
1 action("storeData").
2 parameter("storeData", list).
3 returnType("storeData", string).
4 ...
5 characteristic("storeCapacity").
6 value("storeCapacity", 20).
7 valueType("storeCapacity", integer).
8 ...
Listing 2: Skill Unit ASP description.
Listing 2 shows the translation of the requirements
in Listing 1. All requirements are translated into
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
190
facts. The Skill Unit provides its Skills as ASP facts
marked by a prefix unit . To detect a missing re-
quirement that is demanded by the task but not pro-
vided by the Skill Unit, a rule is added to the ASP
program for each requirement of the task. Listing 3
illustrates an excerpt of these rules.
1 missing(REQ) :- action(REQ),
not unit_action(REQ).
2 wrong_param(REQ, PARAM) :-
parameter(REQ, PARAM),
not unit_parameter(REQ, PARAM).
3 ...
Listing 3: Matching rules.
Informally speaking, the head of the rule in Line 1
is derived if an action is required but not provided by
the unit. The results of the ASP program are provided
by an Answer Set. It contains the minimal set of lit-
erals which includes all facts and the derived rules. If
all requirements are met, the Answer Set only con-
tains the initial facts.
3.2 Behaviour Implementation
In order to generate models of the Behaviour Imple-
mentation, the Skill Unit monitors the corresponding
input and output data. Afterwards, the Skill Unit ap-
plies machine learning algorithms on the observed in-
put and output data to create a detailed description
that captures the behaviour at runtime. Thus, a classi-
fication and comparability of the runtime behaviours
in different tasks is feasible and a potential future op-
timisation of the task flow is supported.
For example, One-Class Support Vector Machines
(OC SVM) learn a hyperplane that can be used to clas-
sify the correct inputs and outputs. The application
of hyperplane-based classifiers ensures interpretable
and transferable models which can be easily com-
pared. Skill Units apply One-class (OC) classifica-
tion since it is particularly suited for a fast generation
of a compact representation model of the Behaviour
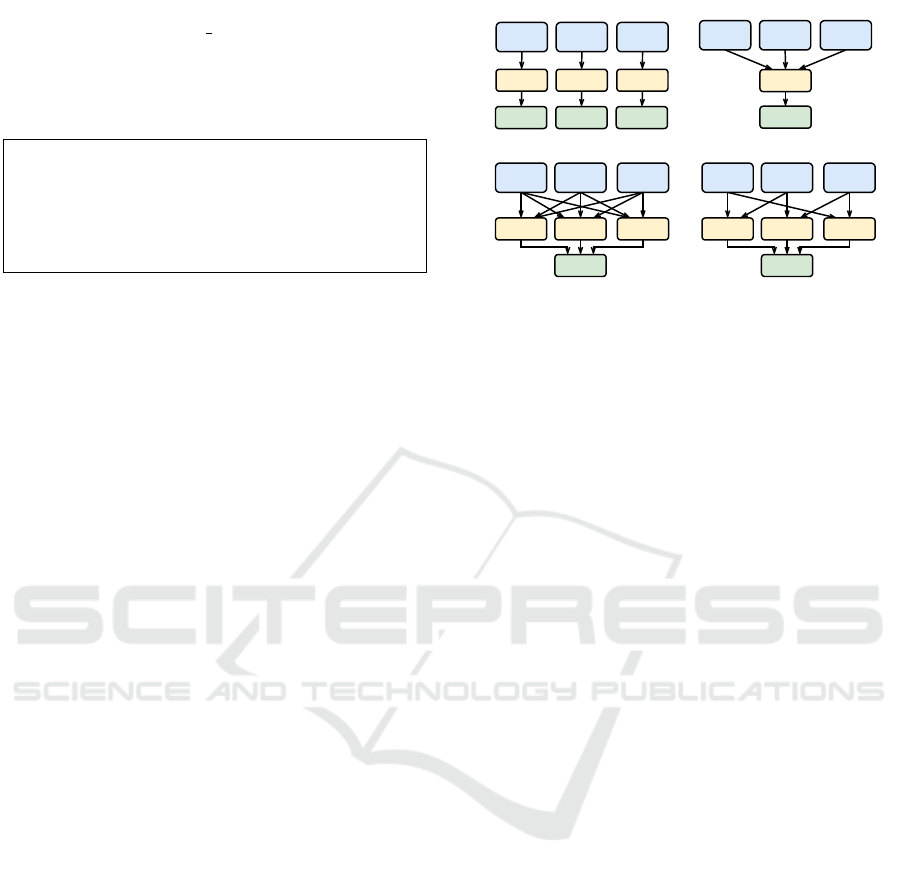
Implementation. In order to distinguish several Be-
haviour Implementations, Multi-class (MC) classifi-
cation can be employed. Several strategies exist to
reduce the complexity of MC-classification. For ex-
ample, multiple binary classifiers can be trained, and
their results can be combined to provide a final classi-
fication. In this case, One-vs-All (OvA) and One-vs-
One (OvO) classifiers can be distinguished. Figure 3
shows an overview of the considered classifiers. Both,
OvA classifiers and OvO classifiers create a model
for each class. In contrast to the OvO classifier, the
OvA classifier enables the subsequent separation of
data according to their class.
Forecast
Classifier Classifier Classifier
Class 1 Class 2 Class 3
One-Class (OC)
OneVsOne (OvO)
Forecast
Classifier
Class 1 Class 2 Class 3
Multi-Class (MC)
OneVsAll (OvA)
Forecast
Classifier
Class 3
Classifier
Class 1 Class 2
Classifier
Forecast
Classifier
Class 3
Classifier
Class 1 Class 2
Classifier
ForecastForecast
Figure 3: Multi vs. binary vs. unary classification.
OC classification approaches employ unary classi-
fiers that do not assign data points to multiple classes.
Instead, they decide whether a data point belongs to
a class or not. They apply a decision function that
assigns a higher weight to regions with high density
and thus tries to classify the area. This results in the
creation of decision boundaries that can be used to
classify data. A single class is established, which is a
small, consistent subset of the data. Density estima-
tion (Tarassenko et al., 1995), volume optimisation,
and model reconstruction (Bishop et al., 1995) pro-
vide the underlying techniques for common OC clas-
sifiers.
Individual classification algorithms can be prone
to under-fitting or over-fitting and therefore, often
lead to ambiguity when assigning a classification
method. In order to prevent this, models are classi-
fied by applying ensemble learning with bootstrap ag-
gregation (bagging) and a voting classifier (Xing and
Liu, 2020). The ensemble learning approach utilises
a collection of classifiers that is taken into account
when determining the results of each classifier. In or-
der to produce a majority decision, the results of all
classifiers are subsequently aggregated. In addition to
higher accuracy, this results in a more comprehensive
mapping of the classes under investigation. While all
classifiers calculate the same prediction in the best
case, they produce a tie in the worst case. The va-
lidity and significance of the predictions can be eval-
uated in this manner. Ensemble learning provides on
average better results compared to the weakest classi-
fier in the collection. However, it may calculate worse
results than the best classifier.
3.3 Distributed Behaviour Repository
Each Skill Unit (Skill Unit) is equipped with a Skill
Manager that is responsible for managing the learned
Behaviour Models provided by the ensemble learn-
Machine-learned Behaviour Models for a Distributed Behaviour Repository
191
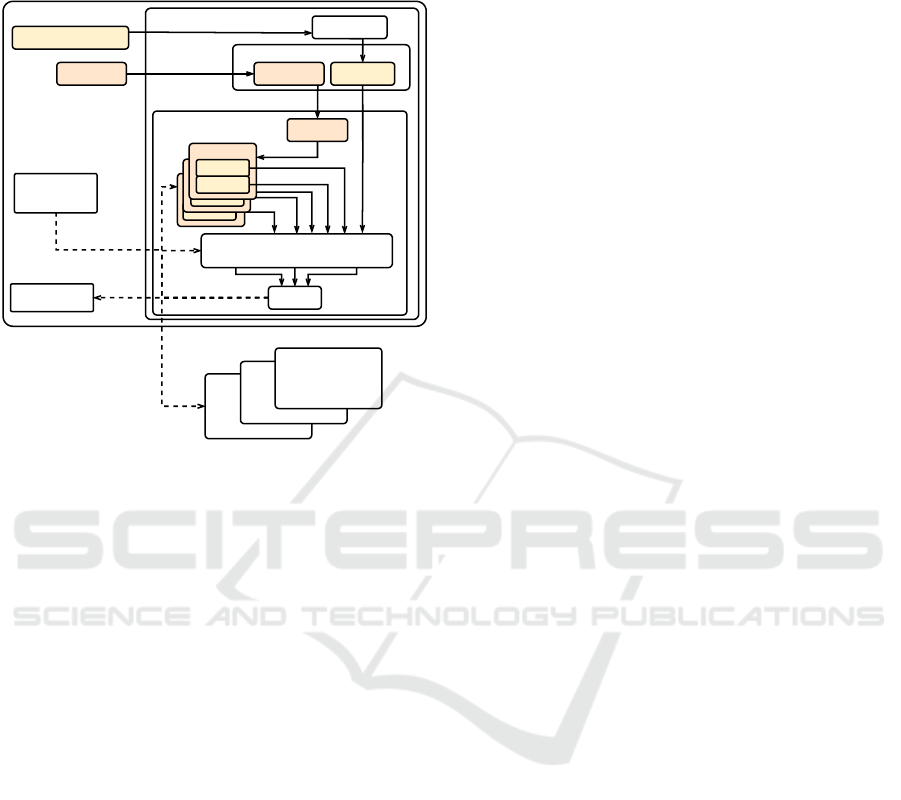
ing. The network of all Skill Managers forms the
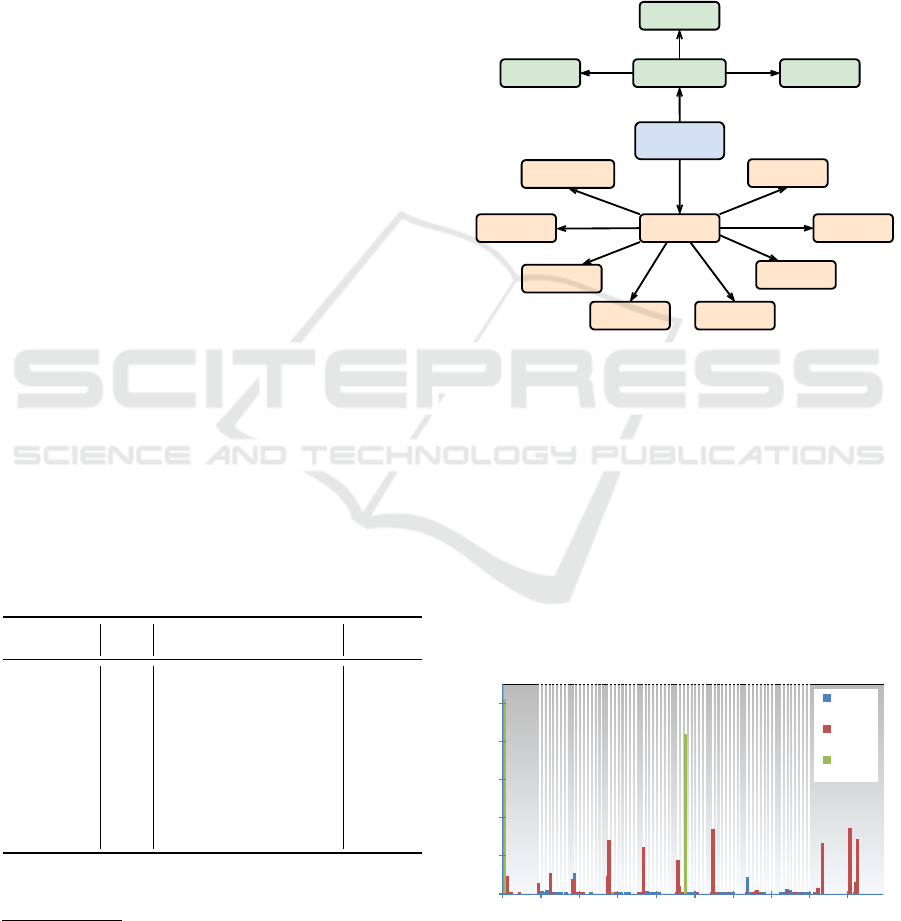
Distributed Behaviour Repository. Figure 4 depicts
the Skill Manager of a Skill Unit. The aforemen-
Skill-Unit
Skill Manager
Behaviour Analysis
Registry Leaf
OC-Model
Registry Leaf
OC-Model
OC-Model
Behaviour
OC-Model
OC-Classifier
OC-Model
Behaviour In-/Output
Skills Skills
Skill Set
OC-Model
Skill Manager
Skill Set
Voting
Ensemble Learning Classifier
Skill Manager
Skill Manager
Knowledge
Base
Behaviour
Optimiser
Figure 4: Skill Unit architecture.
tioned categories of classifiers take effect in each Skill
Manager. The Skill Unit collects the input and output
data of the current Behaviour Implementation to gen-
erate and maintain a corresponding Behaviour Model
through an OC classifier. The structure of this Be-
haviour Model depends on the applied machine learn-
ing mechanism. For example, the usage of a Sup-
port Vector Machine (SVM) results in a hyperplane-
based model. To apply MC-classification, each Skill
Unit would have to collect the input and output data
from all existing Skill Units, which, however, does
not scale and would violate privacy concerns. After
the data collection, the Skill Unit combines the Be-
haviour Model with the extracted Skill Set. The ob-
tained Skill Set is forwarded to the Skill Manager. In
the Skill Manager, already classified Behaviour Mod-
els are grouped according to their Skill Sets. The Skill
Manager decomposes the incoming Skill Set and uses
the extracted Skills, for example, the interface de-
scription or the location, to select all associated Be-
haviour Model groups. The latter ones are compared
with the newly received model by applying ensemble
learning.
The resulting prediction is used to narrow down
the selection to at least one Behaviour Model group.
If there is a high probability that the selected group
will satisfy the query, an OC-classifier represent-
ing the group is trained. Afterwards, the Behaviour
Model of the Skill Unit is classified with this OC-
classifier. In the case of a positive result, the Be-
haviour Model of the Skill Unit is added to the group.
The model of the classifier is returned to the Skill
Unit, which in turn verifies the model with its own
input and output data observations. Otherwise, the
query is forwarded to the Skill Manager of seman-
tically fitting Skill Units. Therefore, we apply our
adaptive semantic routing mechanism that we devel-
oped in a previous work (Jakob et al., 2021). This
mechanism is tailored for multi-agent systems in dy-
namic environments. In the worst case, no fitting
group is found, and a new group is created on the last
visited Skill Unit, and a new entry is established in the
Knowledge Base. Any future Skill Unit that is classi-
fied into the same Behaviour Model group is added to
this entry and replicates it to the Knowledge Base.
Since the Skill Sets and the input and output data
of a Skill Unit are subject to changes during runtime,
the Skill Managers need appropriate information to
perform updates on them. The Skill Unit continu-
ously monitors the Skill Set of its Behaviour Imple-
mentation and forwards changes to the Skill Man-
ager. In the case of a change of a Skill, the update
is propagated by means of our routing mechanism. If
a Behaviour Implementation changes, which the OC-
classifier of the Skill Unit detects, the change is prop-
agated to the appropriate Skill Managers that verify
the change. If the verification fails, the initial process
of announcing a Behaviour Model is started again.
Over time, Behaviour Model groups are growing,
and the assignment of Behaviour Models to a group is
imprecise and has to be renewed. Therefore, the Skill
Managers have to analyse and restructure the groups.
In this process, single Behaviour Model groups are
disbanded and are reintroduced to the system sepa-
rately. Thus, Behaviour Models are assigned to the
best fitting group, or new groups are created.
3.4 Behaviour Optimiser
Each Skill Unit is equipped with a Behaviour Op-
timiser that has access to the Knowledge Base and
the Distributed Behaviour Repository, which is rep-
resented by the network of Skill Managers. Using
the Knowledge Base, the Behaviour Optimiser can
query the Skill Managers for suitable Behaviour Im-
plementations and their features. These features are
collected during the execution of the respective Be-
haviour Implementation and serve for calculating the
performance metric. The metric is determined by the
utility function of the task, which denotes the relevant
features. By default, the rate of successful executions
is captured. This feature is applied by a default func-
tion if no utility function is given by the task. The
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
192
default function scores the successful against the un-
successful executions of a Behaviour Implementation.
An example of a task-specific utility function is ex-
plained in the evaluation. In case a utility function is
provided by the task, its set of features is compared
to the captured features of the Behaviour Implemen-
tation. If they do not match, the utility function is
ignored. Instead, the rate of successful executions is
used. If the performance metric of the received Be-
haviour Implementation is higher, the current one is
replaced.
4 EVALUATION
To demonstrate the power of our black-box approach
to the extraction of Behaviour Models, we selected
complex software routines with similar Skill Sets but
different Behaviour Implementations. In our eval-
uation scenario, we use software agents for Skill
Units that play chessboard-like games against each
other. The Behaviour Implementations may distin-
guish themselves in the game rules they adhere to,
such as Standard Chess, Chinese Chess, and Check-
ers, and the game strategies they apply.
The implementation of our Skill Units is based
on an extended version of the ALICA frame-
work (Skubch, 2012). ALICA stands for A Language
for Interactive Cooperative Agents and enables mod-
elling of agent and team behaviour. To ease the de-
velopment of the agents, ALICA provides a graphical
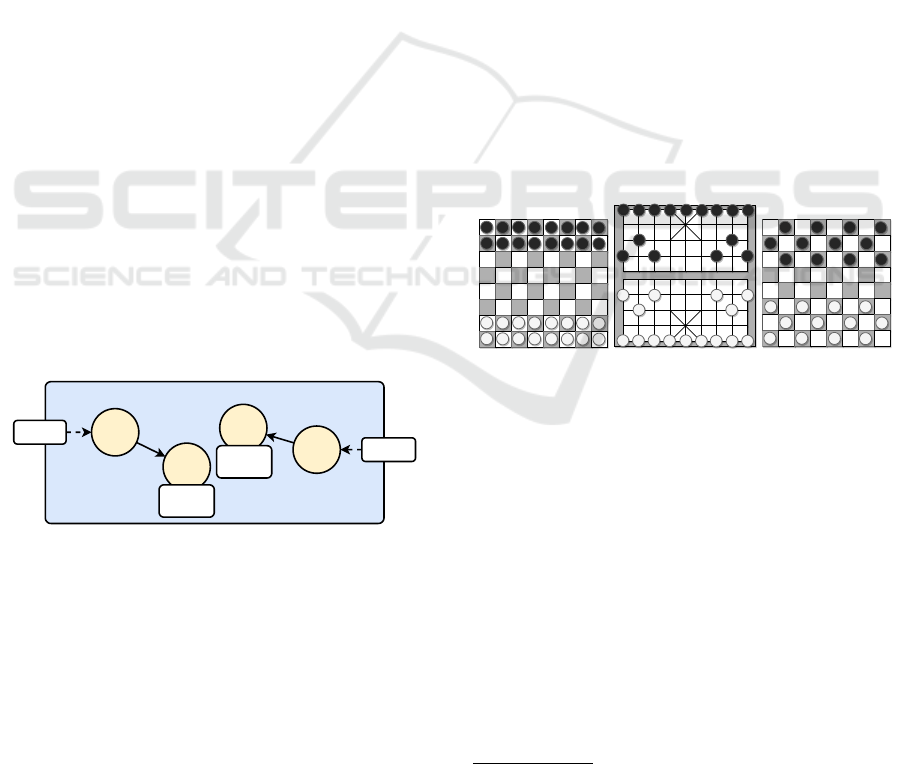
modelling tool. By means of the tool, plans with their
containing tasks and the linked finite state machines
can be designed. Figure 5 depicts the plan for the
Game
Player 1
Player 2
Wait
Wait
Play
Play
Behaviour
A
Behaviour
B
Figure 5: Game plan.
evaluation scenario. It includes two tasks where each
player first waits for the other player and then starts
to play. Since the Behaviour Implementations for the
corresponding Behaviours is domain-specific, it has
to be provided by the developer or a third party. In
our case, the role of the third party is fulfilled by the
Skill Unit that may overwrite the Behaviour Imple-
mentation deployed by the developer.
As mentioned before, the Skill Manager of the re-
ceiving Skill Unit extracts the tasks of the incoming
plan. After approving the compliance of the syntactic
and semantical descriptions of the interface provided
by the task with the Skills of the Skill Unit, the Be-
haviour Optimiser extracts the utility function of the
task, if existing, and the Behaviour Implementations
with their Skill Set. The Behaviour descriptions in
the Skill Set are applied to query the Distributed Be-
haviour Repository for alternative Behaviour Imple-
mentations and their captured features.
Considering our chessboard-like game behaviour
evaluation, the utility function m calculates a score
taken wins x, draws y , and losses z into account.
m(x , y , z ) = 2 · x + y − z (6)
Furthermore, we could normalise the metric by divid-
ing it by the number of played games. However, this
could favour newly created Behaviour Implementa-
tions since they could achieve similar results to fre-
quently executed Behaviour Implementations with a
few consecutive wins. Without normalisation, the ro-
bustness of the Behaviour Implementations is consid-
ered. Hence, we do not normalise the metric. The
utility function is attached to the tasks Player 1 and
Player 2, illustrated in Figure 5. As Behaviour Imple-
mentations, we utilise different chessboard-like game
strategies. These are Standard Chess (Figure 6a), Chi-
nese Chess (Figure 6b), and Checkers (Figure 6c).
The gameboards of the considered games have sim-
(a) Standard (b) Chinese (c) Checkers
Figure 6: Chessboard-like games.
ilar dimensions. While Standard Chess and Checkers
boards have 8x8 positions, Chinese Chess uses 10x9
positions. Furthermore, Standard Chess has 32, Chi-
nese Chess has 30, and Checkers has 24 pawns. The
course of each game is turn-based, and during each
turn, a single pawn can be moved. While Standard
and Chinese Chess allow moving a pawn only once
in one turn, a pawn in Checkers can be moved sev-
eral times if an opponent pawn is removed from the
gameboard. Each game has different rules and, thus a
different Behaviour.
For the evaluation, we consider different rule im-
plementations. We utilise four rule implementations
for Standard Chess, Laser
1
, Stockfish
2
, Pulse
3
, and
1
https://github.com/jeffreyan11/uci-chess-engine
2
https://github.com/mcostalba/Stockfish
3
https://github.com/fluxroot/pulse
Machine-learned Behaviour Models for a Distributed Behaviour Repository
193
Fruit-Reloaded
4
. For Chinese Chess, two rule imple-
mentations are include, Mars
5
and Elephant Eye
6
. In
the case of Checker, one rule implementation is used
Ponder
7
, since it is the only available open-source
implementation. To utilise these rule implementa-
tions, we provide corresponding Behaviour Imple-
mentations. Furthermore, for simple expandability,
we provide a common protocol that enables the inter-
action between the different Behaviour Implementa-
tions since they are encapsulated in separate processes
and have to communicate via messages. These mes-
sages adhere to the following standard protocols:
UCI. Universal-Chess-Interface is a communication
protocol first published by Huber and Meyer-
Kahlen in (Meyer-Kahlen and Huber, 2015). The
protocol allows different Standard Chess imple-
mentations to interact with a graphical user in-
terface or with other implementations. All used
Standard Chess Engines support the UCI specifi-
cation.
UCCI. Universal-Chinese-Chess-Interface is imple-
mented by the Chinese Chess Engines. The pro-
tocol adapts the UCI specification, and all com-
mands relevant for the evaluation are directly
transferable.
Table 1 presents the interaction between Player 1
and Player 2 during a game of Standard Chess. Player
1 utilises the Stockfish rule implementation and starts
the game by moving a pawn from field e2 to field e4.
In every turn, the current player gets a list of all previ-
ously performed moves as input and provides an an-
swer, including the next move as output. This results
in input and output pairs that are hardly distinguish-
able syntactically but differ semantically.
Table 1: Game history of moves at the beginning.
Impl. Col Input Output
Stockfish w e2e4
Laser b e2e4 e7e5
Stockfish w e2e4 e7e5 g1f3
Laser b e2e4 e7e5 g1f3 b8c6
Stockfish w e2e4 e7e5 g1f3 b8c6 f1b5
... ... ... ...
4
https://www.chessprogramming.net/fruit-reloaded
5
https://github.com/yytdfc/ChineseChess-engines
6
https://github.com/xqbase/eleeye
7
https://github.com/neo954/checkers
4.1 Classification Methods
We mainly differentiate two types of classification.
The first type is context-based which means that it
comprises the syntactical information about the mes-
sage structure. In contrast, the second type is context-
free and thus, does not have access to such kind of
information. Both consider input and output data to
analyse the Behaviour Implementation. Figure 7 il-
lustrates the two types and the derived classifiers.
Classifier
Context-based
Turn
Multi-Game One-Game
Context-freeMC
OC
R-OC
AdaBoost SVM
k-NN
AdaBoost DT
OvOOvA
Figure 7: Relations between applied classifiers.
Context-based Classification. Context-based clas-
sifiers utilise knowledge about the structure of the in-
put and output data. The structure-based knowledge
comprises information about game turns and game
rules, as well as information about the message struc-
ture. This, for instance, enables the extraction of
all turns from the input and output data and a sub-
sequent conversion of each turn from a string rep-
resentation a1a3 to an equivalent sequence of num-
bers 0103. The following classifier methods apply
this structural knowledge about the communication.
Turn-Classifiers use the distribution of moves for the
0%
2%
4%
6%
8%
10%
a1a9 a2b9 a3c9 a4d9 a5e9 a6 f9 a7g9 a8h 9 a9i9
Standard
Ches s
Chinese
Ches s
Checker s
0%
2%
4%
6%
8%
10%
a1a9 a2b9 a3c9 a4d9 a5e9 a6 f9 a7g9 a8h 9 a9i9
Stockfish
Laser
Mars
Pulse
Ele eye
Ponder
FruitRel oa ded
Figure 8: Move distribution grouped by game type.
classification. Therefore, each game history is divided
into segments consisting of four characters that de-
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
194
note a single turn, e. g., a0b2. The first two charac-
ters a0 are the start, and the second two characters b2
are the end position of the turn. This classifier uses
the course of complete matches as input. However,
a single match does not provide sufficient informa-
tion to learn the actual distribution of moves. There-
fore, all game histories are combined, and the percent-
age distribution of all moves is determined. Figure 8
presents the move distribution of the utilised training
data. The grey areas indicate moves that can only oc-
cur in Chinese Chess since its gameboard is bigger
than Standard Chess and Checkers. Additionally to
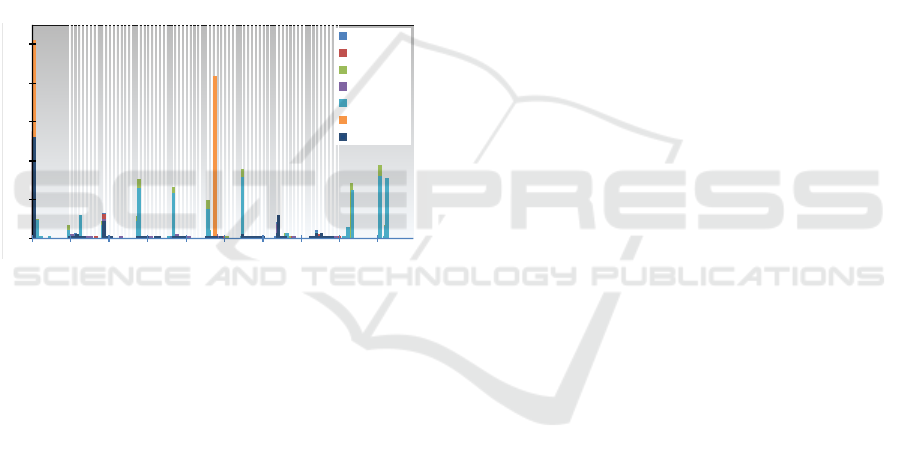
the distinction of each game type, the Turn-Classifier
enables differentiation between Behaviour Implemen-
tations of a single game type. Figure 9 illustrates the
resulting move distributions. Behaviour Implemen-
tations with similar strategies have similar move dis-
tributions. Again, the grey areas mark moves only
available in Chinese Chess. After the classifier has
0%
2%
4%
6%
8%
10%
a1a9 a2b9 a3c9 a4d9 a5e9 a6 f9 a7g9 a8h 9 a9i9
Standard
Ches s
Chinese
Ches s
Checker s
0%
2%
4%
6%
8%
10%
a1a9 a2b9 a3c9 a4d9 a5e9 a6 f9 a7g9 a8h 9 a9i9
Stockfish
Laser
Mars
Pulse
Ele eye
Ponder
FruitRel oa ded
Figure 9: Move distribution of different implementations.
been trained, it compares the move distribution to a
new game history. The similarity is determined by
the differences to the learned frequencies. Finally, the
classifier selects the Behaviour Implementation with
the lowest divergence as the result. Turn-Multi-SVM-
Classifiers employ the same training data set used to
learn the Turn-Classifiers. Instead of focussing on the
percentage distribution, it trains two distinct Multi-
SVMs. Therefore, it focuses on white and black turns
separately and determines the frequency of each move
in the input and output data. By using the resulting
pairs of move and percentage, two Multi-SVMs are
trained. Finally, the game types and the Behaviour
Implementations are used as the class labels indepen-
dently for the corresponding Multi-SVM resulting in
two Multi-SVMs, one for all game types and one for
all Behaviour Implementations.
Turn-OC-SVM-Classifiers follow a similar strat-
egy. Instead of training separate Multi-SVMs for
game types and Behaviour Implementations, Turn-
OC-SVM-Classifiers train single OC-SVMs for each
game type and each Behaviour Implementation.
Thus, ten OC-SVMs are created. Each OC-SVM clas-
sifies a new game history, and the best result is finally
selected.
Context-free Classification. In contrast to context-
based classifiers, context-free classifiers only con-
sider input and output data streams without consid-
ering any context of the data structure. During our
evaluation, we have selected several string metrics for
this type of classifiers. Table 3 provides an overview
of the selected string metrics. The necessary com-
parison string is learned by training an OC classifier
model.
4.2 Experimental Results
We implemented the chessboard-like game scenario
by utilising the adapted version of the ALICA frame-
work. The experiments run on an Ubuntu server with
an Intel Core i7@2.8 GHz with 4 CPU cores and
12 GB of RAM. Some of the Behaviour Implemen-
tations require Java 8 for execution. The other ones
are written in C++ and compiled on the server. This
evaluation focuses on the viability of our approach
by combining different classification techniques and
implementations. These include support-vector-based
techniques, decision-tree-, and k-NN-based imple-
mentations.
During the experiment executions, 5670 matches
were played, 810 for each Behaviour Implementa-
tion. Additionally, we created further Behaviour
Implementations for Standard and Chinese Chess,
which simulate matches against the real implemen-
tations. They create random turns which still adhere
to the dimensions of the gameboard. By using these
Behaviour Implementations, we produced 200 addi-
tional game histories, 100 for Standard and Chinese
Chess each.
Context-based Classifier. The first experiment ex-
amines context-based behaviour classification. The
evaluation framework creates Behaviour Models by
utilising the context-based classifiers. The framework
used the first 90 % of 810 game histories to train the
classifiers and subsequently the remaining 10 % for
the evaluation.
Table 2 summarises the results of the context-
based classifiers. In the case of the Turn and the
Turn-Multi-SVM classifier, the classification of the
game type achieves high accuracy with 97.52 % and
99.9 %. However, the OC-SVM is not suited for this
approach since it achieves similar accuracy, such as a
random guess. The results are influenced by the spe-
cific characteristics of the game types. Chinese Chess
Machine-learned Behaviour Models for a Distributed Behaviour Repository
195
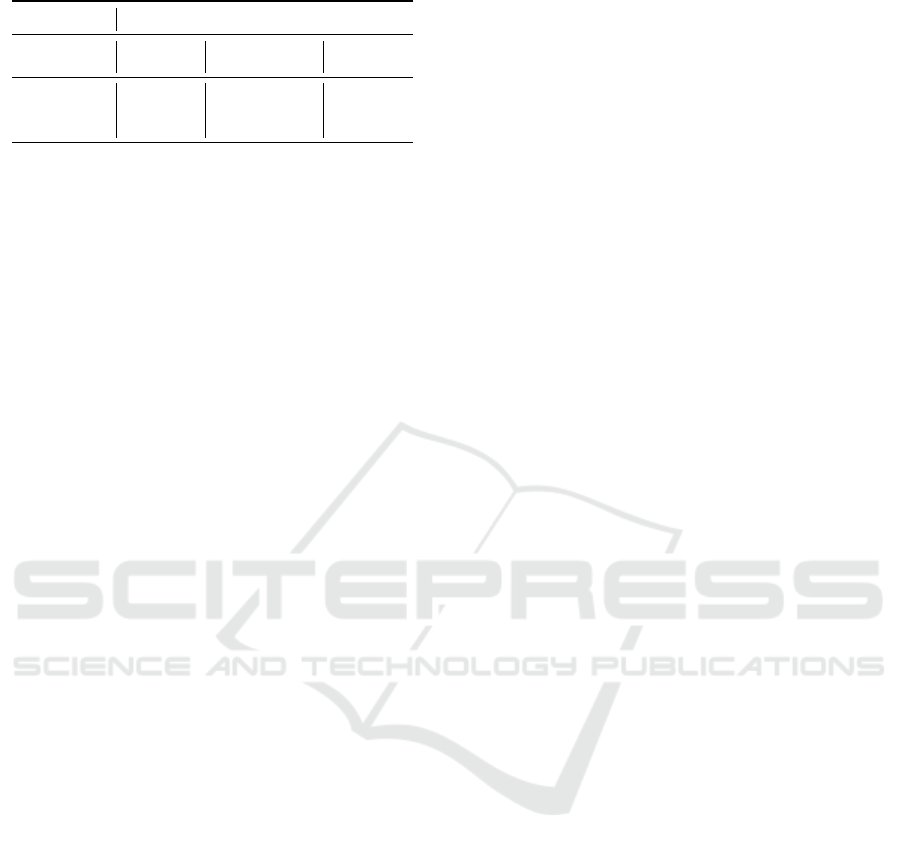
Table 2: Accuracy of context-based classifiers.
Classifier
Class. type Turn Multi-SVM OC-SVM
Game Type 97.52 % 99.9 % 30.45 %
Beh. Impl. 63.86 % 78.71 % 17.08 %
allows moves that are not impossible or forbidden in
the remaining game types (grey areas in Figure 8). In
the case of Checkers, their matches start with similar
moves and thus are distinguishable from both chess
variants. Furthermore, Checkers consists of diagonal
movements, such that vertical or horizontal moves are
prohibited.
In general, the classifiers for the Behaviour Imple-
mentations achieve a lower accuracy since they have
to consider more classes that are more similar than the
classes of game types. The Turn classifier have an ac-
curacy of 63.86 % and the Turn-Multi-SVM classifier
78.71 %. again, the OC-SVM can be compared to a
random guess.
In summary, game types, as well as Behaviour Im-
plementations, can be distinguished by applying con-
text information. However, the classification of differ-
ent Behaviour Implementations is less accurate than
the classification of the game types.
Context-free Classifier. The second experiment
considers context-free behaviour classification. For
this experiment, we generated 10000 strings and after-
wards identified the 100 best-suited strings by training
an OC classifier model. The selected string are used
as comparison strings for the string distance metrics.
The results are shown in Table 3. Each percent-
age denotes the average classification accuracy of all
selected strings applied on corresponding machine
learning algorithms. Again, we use 90 % of the 5670
matches to train the classifiers and the remaining 10 %
for the evaluation. During this evaluation, we utilise
two kinds of one-class (OC) classifiers. The first one
is the Enhancing-Eta OC-SVM (Amer et al., 2013)
which requires less memory and CPU. Therefore, the
SVMs are enhanced by reducing the number of con-
sidered support vectors (Amer et al., 2013). Based on
its support vectors, the R(econstruction)-OC-SVM is
trained. The R-OC-SVM is based on the Enhancing-
Eta OC-SVM, too. R-OC-SVM is an OC-SVM that
learns a model using support vectors extracted from
previously trained SVM models. Both achieve very
similar results with a slight advantage for the R-OC-
SVM. However, their accuracy is not high enough to
be applicable.
In contrast to OC-classifiers, MC-classifiers
achieve suitable performance consistently. Thus, the
ensemble learning implementation of all Skill Man-
agers is equipped with the evaluated MC-classifiers.
Besides the Decision Tree approach, all multi-class
classifiers achieve similar results and high accuracy.
As expected, the accuracy is higher for game types
than for Behaviour Implementations.
Evaluation Results. After several passes through
the evolution process, it is obvious that our approach
is able to determine the game type reliably. Stan-
dard Chess and Checkers are always detected. Check-
ers has turns that do not occur in both chess vari-
ants. Considering both chess variants, Chinese Chess
is classified as Standard Chess in roughly 2.4 % of the
cases. This is caused by the similarity of the turns of
both game types.
Considering the Behaviour Optimiser, the perfor-
mance metric shown in Equation (6) provides a rank-
ing between the Behaviour Implementations. Ta-
ble 4 presents the results for each game type. The
Behaviour Implementation of FruitReloaded achieves
the best result for Standard Chess with a metric of
419 after playing 566 games. Normalising this result
would lead to a metric value of 0.79. On the other
hand, Stockfish achieves a significantly higher nor-
malised metric value of 0.84. However, it has played
only 472 games. Applying the performance metric,
the results consider the number of played games and
thus consider the reliability of the Behaviour Imple-
mentations. This leads to the ranking of the Be-
haviour Implementations in Table 4.
5 RELATED WORK
In the area of multi-agent systems, several papers deal
with learning of behaviours. However, only a few fo-
cus on evaluating the behaviours of agents to extract
a corresponding behaviour model.
Dia et al. determine in (Dia, 2002) the behaviour
of human drivers by specifying it via questionnaires.
These questionnaires are used to generate representa-
tive models of human behaviour for specific routes.
The applied multi-agent system integrates the created
models to reduce congestions and to enhance the per-
formance of road networks. In contrast, our approach
provides an automated model generation for arbitrary
agent behaviour. Furthermore, we utilise these gen-
erated models to categorise different behaviour im-
plementations. The resulting behaviour repository is
used to optimise the performance of agents during
specific tasks.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
196
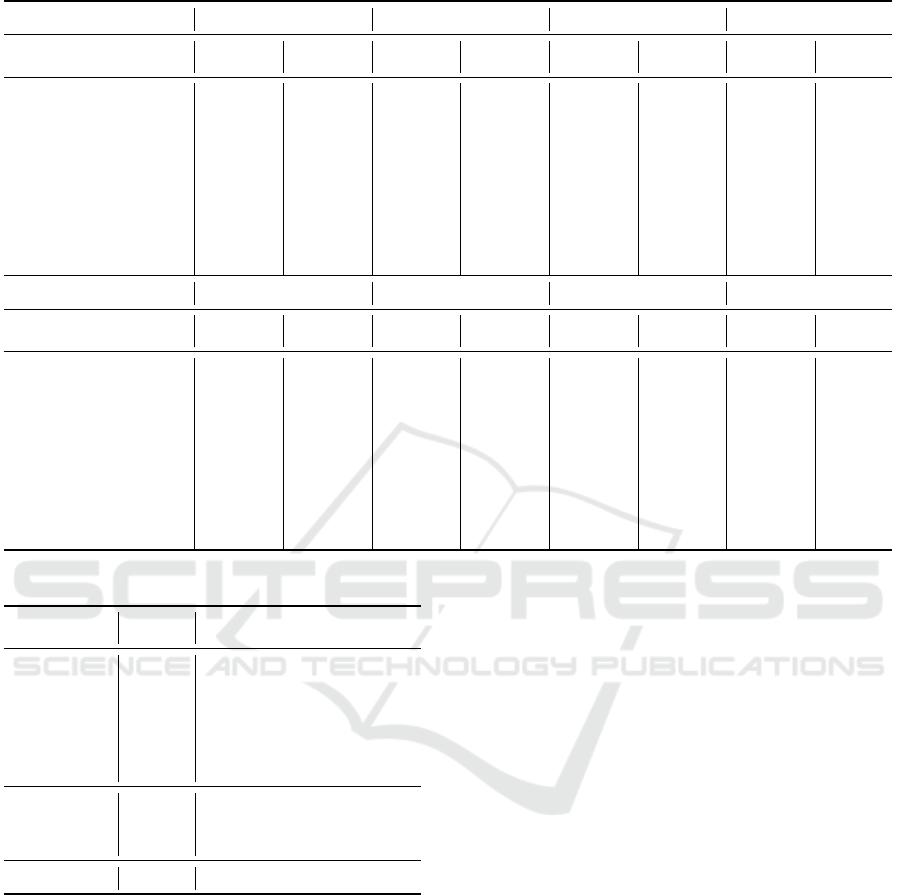
Table 3: Results of Context-free Classifiers.
MC-SVM OC-SVM R-OC-SVM AdaBoost SVM
Dist. Metric Type Impl. Type Impl. Type Impl. Type Impl.
Weighted-Levenshtein 86.13 % 53.59 % 25.57 % 10.86 % 28.41 % 9.73 % 89.38 % 55.46 %
Normal-Levenshtein 78.83 % 44.23 % 21.16 % 8.48 % 26.76 % 7.21 % 86.56 % 35.05 %
Damerau-Levenshtein 78.84 % 44.24 % 21.24 % 8.58 % 26.66 % 7.20 % 86.81 % 26.81 %
Sorensen-Dice 63.79 % 16.34 % 3.73 % 0.73 % 3.17 % 0.60 % 69.83 % 16.16 %
Jaccard 63.52 % 16.16 % 1.27 % 0.16 % 1.27 % 0.16 % 68.74 % 16.16 %
Jaro-Winkler 66.21 % 22.42 % 6.92 % 1.50 % 5.15 % 1.03 % 70.83 % 22.05 %
k-NN AdaBoost DT OvO OvA
Dist. Metric Type Impl. Type Impl. Type Impl. Type Impl.
Weighted-Levenshtein 89.06 % 55.62 % 64.26 % 29.41 % 90.43 % 58.92 % 90.32 % 53.24 %
Normal-Levenshtein 84.63 % 46.56 % 63.98 % 25.43 % 86.20 % 51.74 % 86.16 % 43.64 %
Damerau-Levenshtein 83.03 % 46.67 % 64.77 % 26.22 % 86.20 % 51.59 % 86.16 % 44.22 %
Sorensen-Dice 26.15 % 13.11 % 63.52 % 16.16 % 63.52 % 16.16 % 63.52 % 20.06 %
Jaccard 26.15 % 13.11 % 63.52 % 16.16 % 63.52 % 16.16 % 63.52 % 20.06 %
Jaro-Winkler 90.68 % 60.68 % 73.62 % 27.39 % 67.52 % 27.05 % 67.91 % 20.74 %
Table 4: Ranking achieved by the behaviour optimiser.
Rank Metric Behaviour Implementation
1. St. Chess 419 FruitReloaded
2. St. Chess 396 Stockfish
3. St. Chess 356 Laser
4. St. Chess -4 Pulse
1. Ch. Chess 463 Mars
2. Ch. Chess 250 Eleeye
1. Checkers 454 Ponder
Suryadi et al. describe in (Suryadi and Gmy-
trasiewicz, 1999) a system of agents where each agent
predicts the behaviour of all other agents by utilis-
ing a trained behaviour model. Thus, they know all
possible actions. However, the internal state is un-
known. To generate a behaviour model, the agents
observe each other and their environment. The re-
sulting model is represented by an influence diagram
which is used to optimise the own behaviour. In con-
trast, we consider an agent behaviour as a black box.
The generated behaviour models are used to rate the
own behaviour and find the most suitable behaviour
implementation.
However, the approaches considered in multi-
agent systems typically do not classify or replace
their behaviour to optimise their performance. Re-
lated work in the area of service-oriented architec-
tures typically focuses on these two aspects. Ser-
vice change management provides automated tools,
including service replacement during the application
life-cycle, which is essential for the robustness and
dependability of a dynamically changing system. In
this area, many papers deal with this topic in the areas
of interface specification, service compatibility, ser-
vice discovery, service matching, and service replace-
ment.
Several tools, frameworks, and strategies were
proposed to detect different kinds of service changes
using syntactical (Fokaefs and Stroulia, 2013) and se-
mantic information (Stavropoulos et al., 2019). In ad-
dition, ontologies are used to represent semantic ser-
vice information (Groh et al., 2019).
Because of the large number of works and limited
space, we discuss related work that focuses on service
analysis utilising data mining and machine learning
techniques to categorise services and find possible re-
placements in the following paragraphs.
In (Shen and Liu, 2019), web service discovery is
divided into two parts. First, the web service clus-
tering represents the service descriptions as vectors
and maps them to the semantic information contained
Machine-learned Behaviour Models for a Distributed Behaviour Repository
197

in the descriptions. The authors provide four differ-
ent unsupervised sentence representations. Second, a
Latent Dirichlet Allocation method detects semantic
topic information of web services after a service re-
quest and stores it into a specific cluster according to
its web service text-description vector.
The authors in (Yang et al., 2019) present a deep
neural network to abstract service descriptions to
high-level features. The additional service classifica-
tion process utilises 50 service categories.
In (Li et al., 2018), the authors propose an au-
tomatic approach to tag web services by extracting
WSDL (Web Services Description Language) infor-
mation and provide tag recommendations for service
discovery using the weighted textual matrix factori-
sation. In contrast to our solution, these works focus
on analysing, extending and categorising interface de-
scriptions and do not consider the behaviours of ser-
vices.
In (Yahyaoui et al., 2015) the authors propose
an approach for modelling and classifying service
behaviours by capturing the service performance
through predefined behavioural patterns. Each pat-
tern is a typical sequence of observations. An obser-
vation denotes the quality of a service for one inter-
action. They also consider services as black boxes
but attempt to match their performance on predefined
patterns.
However, none of the works uses the black box be-
haviour observation of services exclusively for clas-
sification in combination with support for additional
data such as service descriptions and semantic infor-
mation for classification improvement.
6 CONCLUSIONS
The main contributions of this paper are self-optimi-
sing tasks that learn representations of Behaviour Im-
plementations. Thus, the tasks are empowered to
evaluate their given Behaviour Implementations and,
if necessary, exchange them for better evaluated im-
plementations of the same behaviour. The imple-
mentations are considered as black boxes, and thus
only the input and output data is considered. Fur-
thermore, a distributed behaviour repository organ-
ises the learned Behaviour Models and supports stor-
ing, searching, and sharing of the corresponding Be-
haviour Implementations. Our evaluation shows the
feasibility of our approach by comparing a set of suit-
able machine learning algorithms. In general, they
achieve reliable results during the classification of dif-
ferent behaviours.
The machine-learned behaviour model represents
the transformation of an input stream to its output
stream. These models can be compared and, based
on the results, equivalent Behaviour Implementations
can be determined. We apply hyperplane classifiers
to learn the Behaviour Model. Due to their specific
characteristics, especially the simple model transfer-
ability and comparability, Support Vector Machines
are well suited. In (Jahl et al., 2018), it is proven that
unsupervised Support Vector Machines are appropri-
ate for the application in this approach if restricted to
one-dimensional inputs and outputs. This work over-
comes the restriction and enables the analysis of com-
plex data structures.
Further research and experiments are necessary
to achieve detailed results about the accuracy of the
utilised classifiers in additional application domains.
In our future work, we want to improve our prototype
by selecting machine learning techniques tailored for
data streams for Ensemble Learning. This leads to
a distributed behaviour repository where individual
Skill Managers are specialised on a specific type of
Behaviour Implementations and thus provides a better
classification for the corresponding behaviour type.
Additionally, higher-level management will provide
a tree-like structure to improve the organisation and
selection of Behaviour Implementation replacements.
REFERENCES
Amer, M., Goldstein, M., and Abdennadher, S. (2013). En-
hancing one-class support vector machines for unsu-
pervised anomaly detection. In Proceedings of the
ACM SIGKDD workshop on outlier detection and de-
scription, pages 8–15.
Bishop, C. M. et al. (1995). Neural Networks for Pattern
Recognition. Oxford University Press.
Dia, H. (2002). An agent-based approach to modelling
driver route choice behaviour under the influence of
real-time information. Transportation Research Part
C: Emerging Technologies, 10(5):331–349.
Fokaefs, M. and Stroulia, E. (2013). WSDarwin: Studying
the Evolution of Web Service Systems. In Advanced
Web Services, pages 199–223. Springer New York.
Gebser, M., Kaminski, R., Kaufmann, B., and Schaub, T.
(2012). Answer set solving in practice. Synthesis lec-
tures on artificial intelligence and machine learning,
6(3):1–238.
Groh, O., Baraki, H., Jahl, A., and Geihs, K. (2019).
COOP - automatiC validatiOn of evOlving microser-
vice comPositions. In Seminar Series on Advanced
Techniques & Tools for Software Evolution. SAT-
ToSE2019, CEUR-WS.
Jahl, A., Jakob, S., Baraki, H., Alhamwy, Y., and Geihs, K.
(2021). Blockchain-based Task-centric Team Build-
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
198

ing. In Proceedings of the ICAART 2021, volume 1,
pages 250–257. SCITEPRESS.
Jahl, A., Tran, H. T., Baraki, H., and Geihs, K. (2018). WiP:
Behavior-Based Service Change Detection. In Inter-
national Conference on Smart Computing. IEEE.
Jakob, S., Baraki, H., Jahl, A., Nyakam Chiadjeu, E. D.,
Alhamwy, Y., and Geihs, K. (2021). Adaptive Seman-
tic Routing in Dynamic Environments. In Proceed-
ings of the ICAART 2021, volume 2, pages 997–1004.
ICAART2021, SCITEPRESS.
Li, G., Cui, Y., Wang, H., Hu, S., and Liu, L. (2018). Web
Services Tagging Method Based on Weighted Textual
Matrix Factorization. In International Conference on
Computer Engineering and Networks, pages 385–390.
Springer.
Meyer-Kahlen, S. and Huber, R. (2015). UCI Schach En-
gine Protocol. Shredder Chess.
Picard, G., H
¨
ubner, J. F., Boissier, O., and Gleizes, M.-
P. (2009). Reorganisation and Self-Organisation in
Multi-Agent Systems. In 1st International Workshop
on Organizational Modeling, ORGMOD, pages 66–
80.
Shen, Y. and Liu, F. (2019). An Approach for Semantic
Web Discovery Using Unsupervised Learning Algo-
rithms. In Cyberspace Data and Intelligence, and
Cyber-Living, Syndrome, and Health, pages 56–72.
Springer.
Skubch, H. (2012). Modelling and Controlling of Behaviour
for Autonomous Mobile Robots. Springer Science &
Business Media.
Stavropoulos, T. G., Andreadis, S., Kontopoulos, E., and
Kompatsiaris, I. (2019). SemaDrift: A Hybrid Method
and Visual Tools to Measure Semantic Drift in Ontolo-
gies. Journal of Web Semantics, 54:87–106.
Suryadi, D. and Gmytrasiewicz, P. J. (1999). Learning mod-
els of other agents using influence diagrams. In UM99
User Modeling, pages 223–232. Springer.
Tarassenko, L., Hayton, P., Cerneaz, N., and Brady, M.
(1995). Novelty Detection for the Identification of
Masses in Mammograms. In Fourth International
Conference on Artificial Neural Networks, pages 442–
447.
Xing, H.-J. and Liu, W.-T. (2020). Robust AdaBoost Based
Ensemble of One-class Support Vector Machines. In-
formation Fusion, 55:45–58.
Yahyaoui, H., Own, H. S., and Malik, Z. (2015). Model-
ing and Classification of Service Behaviors. Expert
Systems with Applications, 42(21):7610–7619.
Yang, Y., Ke, W., Wang, W., and Zhao, Y. (2019). Deep
Learning for Web Services Classification. In Inter-
national Conference on Web Services (ICWS), pages
440–442. IEEE.
Machine-learned Behaviour Models for a Distributed Behaviour Repository
199
