
Prediction of Store Demands by Decision Trees and Recurrent Neural
Networks Ensemble with Transfer Learning
Nikica Peri
´
c
1 a
, Naomi-Frida Muniti
´
c
1 b
, Ivana Ba
ˇ
sljan
1 c
and Vinko Le
ˇ
si
´
c
1 d
Laboratory for Renewable Energy Systems, Faculty of Electrical Engineering and Computing,
University of Zagreb, Zagreb, Croatia
Keywords:
Multi Period VRP, Prediction of Delivery Capacities, Gradient Boosting Decision Trees, Recurrent Neural
Networks, Transfer Learning.
Abstract:
Simple vehicle routing problem (VRP) algorithms today achieve near-optimal solution and solve problems
with a large number of nodes. Recently, these algorithms are upgraded with additional constraints to respect an
increasing number of real-world conditions and, further on, adding a predictive character to the optimization.
A distinctive contribution lies in taking into account the predictions of orders that are yet to occur. Such
problems fall under time series approaches that are most often obtained using statistical methods or historical
data heuristics. Machine learning methods have proven to be superior to statistical methods in most of the
literature. In this paper, machine learning techniques for predicting the mass of total daily orders for individual
stores are further elaborated and tested on historical data of a local retail company. Among the tested methods
are Gradient Boosting Decision Tree methods (XGBoost and LightGBM) and methods of Recurrent Neural
Networks (LSTM, GRU and their variations using transfer learning). Finally, an ensemble of these methods is
performed, which provides the highest prediction accuracy. The final models use the information on historical
order quantities and time-related slack variables.
1 INTRODUCTION
The Vehicle Routing Problem (VRP) is one of the
most studied topics when it comes to combinatorial
optimization and operations research. The goal of a
VRP is to enable orders to be delivered to the desired
locations in a desired time with the lowest possible
costs. Since the problem is very complex compu-
tationally (complexity is O(n!), where n is the total
number of locations), it is impossible to find an opti-
mal solution for problems with a large number of lo-
cations in a limited time. Therefore, various methods
are developed to find a suboptimal solution. Heuristic
and meta-heuristic methods based on local search are
most often used (Gillett and Miller, 1974), (Rochat
and Taillard, 1995), (Nagata and Br
¨
aysy, 2009). More
recently a number of algorithms use deep reinforce-
ment learning (Nazari et al., 2018).
There are different variants of a VRP depend-
ing on what requirements it should meet during
a
https://orcid.org/0000-0002-2476-6305
b
https://orcid.org/0000-0002-8337-6251
c
https://orcid.org/0000-0001-9495-6342
d
https://orcid.org/0000-0003-1595-6016
optimization. Among established variants are Ca-
pacitated Vehicle Routing Problem (CVRP) intro-
duced in (Dantzig and Ramser, 1959) and Vehi-
cle Routing Problem with Time Windows (VRPTW)
elaborated in (Solomon, 1987). Recent research
often analyzes other variants such as Multidepot
Vehicle Routing Problem (MDVRP), (Lau et al.,
2010), Three-dimensional Loading Capacitated Ve-
hicle Routing Problem (3L-CVRP,) (Tarantilis et al.,
2009) or Pickup and Delivery Vehicle Routing Prob-
lem (PDVRP), (Chen and Fang, 2019). Additional
variants are often combined with CVRP and VRPTW
to better incorporate real-world requirements as e.g.
in (Wang et al., 2016). Despite many requirements
that are being considered in optimization, little atten-
tion is paid to the predictive component.
The Time Dependent Vehicle Routing Problem
(TDVRP) takes into account the time component to
avoid traffic jams. The TDVRP consideres 3.06% of
VRP papers from the 2009-2015 period according to
(Braekers et al., 2016). The predictive component
that combines current orders with anticipated orders
for other days or shifts is used in even fewer VRP al-
gorithms. This variant is called Multi Period Vehicle
218
Peri
´
c, N., Muniti
´
c, N., Bašljan, I. and Leši
´
c, V.
Prediction of Store Demands by Decision Trees and Recurrent Neural Networks Ensemble with Transfer Learning.
DOI: 10.5220/0010802500003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 218-225
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Routing Problem (MPVRP) and can be found in (Wen
et al., 2010) or (Mancini, 2016). The authors identify
variables where predictions should improve the exist-
ing state of VRP algorithms, especially in the last-
mile delivery. These are: i) prediction of the delivery
point time matrix (used for TDVRP), ii) prediction of
store (delivery point) activity, and iii) prediction of
the quantity of goods to be delivered (can be divided
into mass prediction and volume prediction). The TD-
VRP implies variable time matrices at different times
of the day, which also takes into account realistic traf-
fic phenomena. Using these matrices, it is possible to
avoid traffic jams in cities by sending vehicles mostly
to the outskirts of the city during heavy traffic, and to
the city center when there is less traffic. Predictions
of store (delivery point) activity allow the algorithm to
better schedule locations visits so that a delivery ve-
hicle visits a specific location fewer times. These pre-
dictions are beneficial for a VRP with a time horizon,
and if orders can be postponed for other days. Pre-
diction of the quantity of goods to be delivered is also
essential in this case. Estimating the quantity needed
to be delivered over the time horizon is important for
determination of how many vehicles and what types
of vehicles are needed to deliver all orders. If nec-
essary, it is possible to postpone deliveries to another
day or to deliver in advance, which reduces the need
for borrowing external vehicles or overtime work and
thus the total operating costs.
In this paper, methods for predicting the mass of
goods to be delivered are compared. Statistical mod-
els such as Autoregressive Integrated Moving Aver-
age (ARIMA) and some of its more advanced vari-
ations are mostly used for similar time series pre-
dictions (Zhang, 2003), (Pavlyuk, 2017). With the
growing popularity of machine learning, new meth-
ods have been developed that are superior in accu-
racy to such statistical methods. (Siami-Namini et al.,
2018). Machine learning methods are used for simi-
lar applications in: (Anzar, 2021), (Mackenzie et al.,
2019) and (Fu et al., 2016). For retail sales series
that are often found as non-linear problems, due to the
seasonality, basic statistical models and linear models
of machine learning are unable to solve such prob-
lems with a higher accuracy. Therefore, it is rec-
ommended to experiment with advanced forecasting
methods such as Neural Networks or Gradient Boost-
ing Methods (Wanchoo, 2019). In further research, it
is also worth to notice that those two models mostly
perform better than other time series and regression
techniques, including cases related to store demands
(Hod
ˇ
zi
´
c et al., 2019).
The methods tested are separated into two groups:
Gradient Boosting Decision Tree (GBDT) and Re-
current Neural Networks (RNN). Among the GBDT
methods, Extreme Gradient Boosting (XGBoost) and
Light Gradient Boosting Method (LightGBM) are
considered. Among the RNN methods, Long Short-
Term Memory (LSTM), Gated Recurrent unit (GRU)
are tested, and these two methods with transfer learn-
ing are considered as a special cases. The same meth-
ods can be used after re-tuning of hyperparameters to
predict the time matrix and predict the activity of the
stores.
This paper first briefly presents all the methods
used in Section II. Section III describes the observed
dataset. Utilized approaches are presented in Section
IV. Data pre-processing, common to all models, is de-
scribed first, followed by the selection of hyperparam-
eters and post-processing. Section V presents the re-
sults. In Section VI, a conclusion is given.
2 METHODOLOGY
The GBDT and RNN methods listed in the introduc-
tion are used to predict the mass of goods to be deliv-
ered. These methods are described below.
2.1 Gradient Boosting Decision Tree
The GBDT is a widely used machine learning al-
gorithm thanks to its efficiency and interpretability.
The model consists of an ensemble of weak mod-
els (decision trees) that through the epochs with the
use of previous models become more accurate and to-
gether give better predictions than individual models.
These predictions, due to a large number of ”weak”
models, give robustness to the common model. Ex-
treme Gradient Boosting (Chen and Guestrin, 2016)
and LightGBM Method (Ke et al., 2017) are currently
among the most successful GBDT implementations.
Compared to standard GBDT, XGBoost provides a
parallel tree boosting to increase speed, uses regu-
larized model and implements Dropouts meet mul-
tiple Additive Regression Trees (DART) to reduce
overfitting, Newton Boosting to converge faster, etc.
The LightGBM algorithm has some changes in addi-
tion to those XGBoost has. The changes are: i) the
Histogram-Based Gradient Boosting algorithm which
increases the execution speed, ii) leaf-wise (best-first)
tree growth instead of level-wise tree growth in XG-
Boost, iii) support for categorical features, etc. The
disadvantage is a large number of hyperparameters,
which makes it difficult to do a detailed grid search.
Prediction of Store Demands by Decision Trees and Recurrent Neural Networks Ensemble with Transfer Learning
219
2.2 Recurrent Neural Networks
The application of Recurrent Neural Networks has in-
creased significantly with the increase in computer
processing power in recent years. The RNNs are se-
lected here because of the chain structure correspond-
ing to time series predictions. The main disadvantage
of classical RNNs is the vanishing gradient problem,
which is mitigated by recently established methods
such as LSTM (Hochreiter and Schmidhuber, 1997)
and GRU (Chung et al., 2014). The LSTM networks
solve this problem using three regulators (gates): for-
get, input and output. The GRU networks are intro-
duced as a variation of LSTM in which the number of
gates is reduced to 2: reset and update. This results in
higher speed and fewer neurons in a single cell, mak-
ing the GRU networks easier to prevent overfitting.
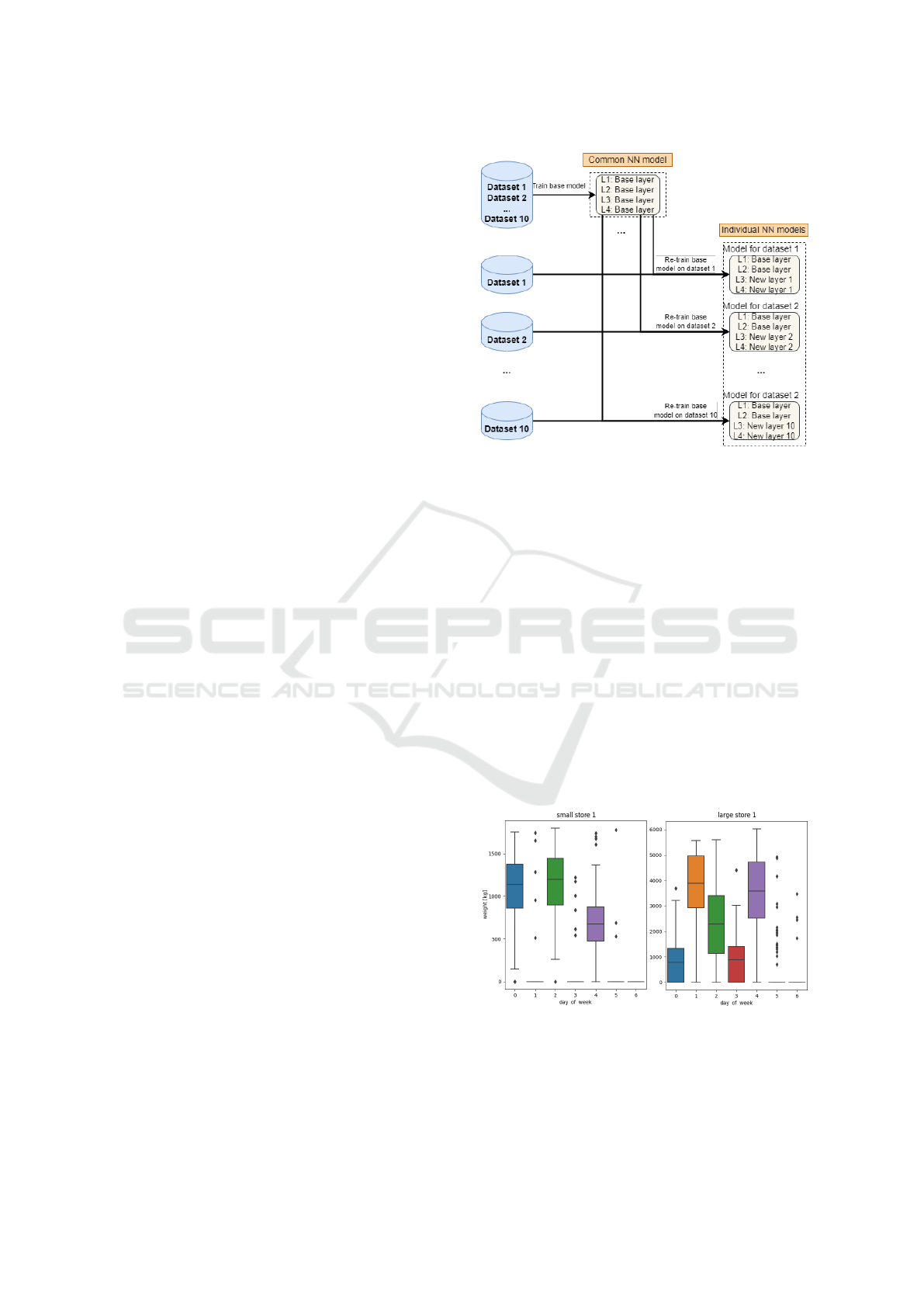
2.3 Transfer learning
Transfer learning is a method where the model is
first trained using one, usually larger dataset, and
then reused and adapted to another, usually smaller
dataset. Although more commonly used in classifica-
tion problems, transfer learning has some applications
in time series prediction (He et al., 2019), (Chaura-
sia and Pal, 2020). According to (Tan et al., 2018),
transfer learning is separated into four categories:
instances-based, mapping-based, network-based and
adversarial-based. The approach used in this paper
is network-based transfer learning. This is applica-
ble when multiple similar datasets relating to individ-
ual units (stores in this paper) are available. First, a
common base model is generated that is trained on all
datasets. Most of the hidden layers of the neural net-
work remain from this model, and the last layers are
then re-trained on individual sets. In this way, each
individual set has own prediction model while the ini-
tial layers are the same for all, and the last layers are
specific to each of the individual sets. The described
approach is shown in Fig. 1.
3 DATASET
The presented predictions are generated from a histor-
ical dataset of a retail company that owns over 1000
delivery locations, of which over 200 are in the con-
sidered city. Most locations relate to stores and ware-
houses. These stores are separated into large, medium
and small categories based on the daily turnover of
goods and the type of goods in the store. The com-
pany also owns a heterogeneous fleet of delivery vehi-
cles. These vehicles transport goods from warehouses
Figure 1: Network based transfer learning structure for 10
individual sets.
to stores. Due to the access restrictions of some trucks
and with the aim of quality planning of the MDVRP, it
is important that the stores are observed individually.
Also, groups of stores differ in some ordering habits,
so most large stores have orders every work day, while
small ones usually order demands 2-3 times a week.
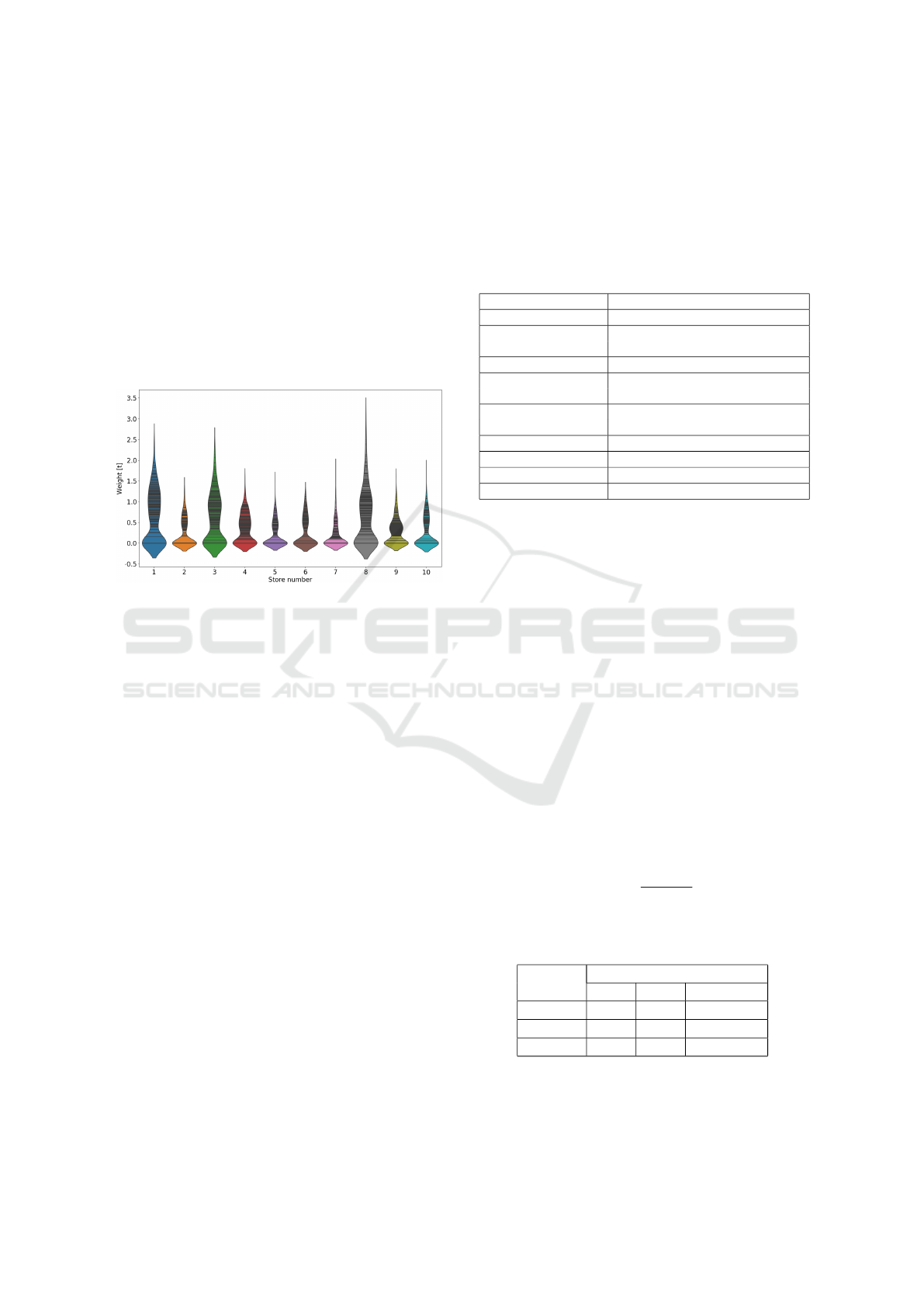
This is evident from Fig. 2, which on the left shows
mass distribution of demands for small store 1 over
the days of the week, and for large store 1 on the right.
Therefore, 10 small, 10 medium and 10 large stores
are selected to test the machine learning models. For
small stores, data processing, tables and predictions
are presented in detail for elaboration and presenta-
tion purpose and while for medium and large stores,
only the final prediction results are shown for meth-
ods scale-up purpose. The data processing procedure
is the same for all 3 types of stores.
Figure 2: Distribution of mass in kilograms by days of week
for small store 1 and big store 1.
The original dataset refers to 2018 and 2019 (730
days) and is structured as a list of orders. Each or-
der corresponds to a specific date and mass of goods.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
220
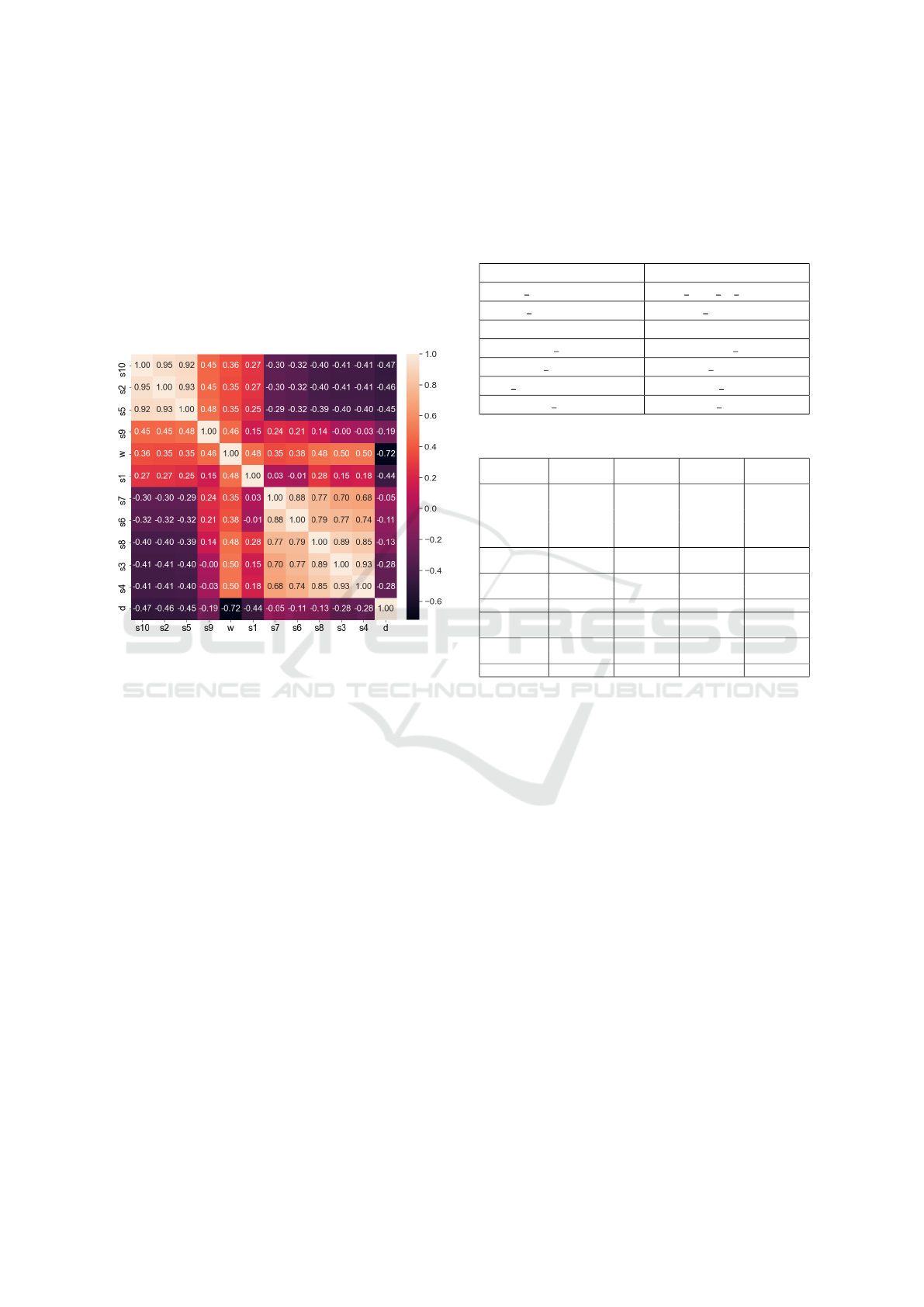
The dataset is restructured into a 2D array where the
columns represent different stores, and each row cor-
responds to a single day. The distribution by mass of
daily orders for each small store is shown in Fig. 3.
The x-axis shows small stores sorted by indices (from
1 to 10), and the y-axis shows the mass that stores
ordered. The wider part of the graph for a particu-
lar store indicates a larger number of orders of simi-
lar mass over the observed time period. For example,
store 5 has fewer days with order deliveries compared
to store 8. Store 1 has an approximately normal dis-
tribution if we exclude non-delivery days, compared
to store 7.
Figure 3: Distribution of mass in tons by daily orders for
each small store.
4 UTILIZED APPROACHES
In order to increase the quality of predictions, the
dataset is preprocessed and inputs obtained by fea-
ture engineering are tested. The already mentioned 6
models with appropriate hyperparameters and an en-
semble of them is tested, and then the results are post
processed. In the sequel, common models notation is
used for transfer learning models from the upper part
of Fig. 1 and individual models refers to XGBoost,
LightGBM, LSTM, GRU, and the lower part of Fig. 1.
4.1 Preprocessing and Feature
Engineering
As mentioned before, the dataset is separated into
three smaller datasets containing orders for 10 small,
10 medium and 10 large stores from 2018 and 2019.
The reason for the separation into categories is that
common models use data similar to individual mod-
els because stores of the same size have similar habits
of ordering goods. The input data for all 6 models
are the same and consist of the variables listed in Ta-
ble I. The common models for first store s
1
have s
i, j
,
d
j
and w
j
as the inputs, and the inputs of the individu-
als model are s
1, j
, d
j
and w
j
. The inputs contain data
from the last 14 days (t
s
· h), by which the model pre-
dicts demands for the next day (t
s
· f ). The variable s
is used to designate days in a week, with demands for
all 10 stores.
Table 1: Models inputs, outputs and common hyperparam-
eters.
Variable and values Description
s
i
store designation, i ∈{1,...,10}
s
i,j
∈{1,...,m
max
} historical store demands,
i ∈{1,...,10}, j ∈{1,...,h}
d
j
∈{1,...,7} day of week, j ∈{1,...,h}
w
j
∈{0, 1} working or non-working day,
j ∈{1,...,h}
p
i,j
∈{1,...,m
max
} predictions of store demands,
i ∈{1,...,10}, j ∈{1,...,f }
m > 0 Store demands mass in kg
t
s
= 1 day Predictions and data resolution
h Amount of historical input values
f Amount of future values to predict
It is observed that stores of similar size have sim-
ilar behavior. Small stores usually have 1-3 orders
per week, while large ones have orders every work-
ing day. In some stores, a change in the customer
habits is noticeable, e.g., a change in the usual or-
dering days from Tuesday and Thursday to Monday
and Friday. In some, an increase or decrease in the
number of orders is evident during the observed pe-
riod, which is caused by a change in the turnover of
the store, and consequently by the number of workers
in it. Among the noticeable deviations are also sin-
gle change of order day, different behavior before the
holidays, etc. Since individual models often do not
have information to learn such behavior changes well
enough, common models are introduced in which
such behavior changes are learned from other stores.
In order not to create bias, common models for small,
medium and large stores are separated according to
the average mass of demands in one day:
s
i,avg
=
∑
730
j=1
s
i, j
730
, (1)
as shown in Table II.
Table 2: Separation of stores by size.
Stores daily demands mass [kg]
size min max average
small 0 500 242.9
medium 500 1250 824.6
large 1250 - 3704.4
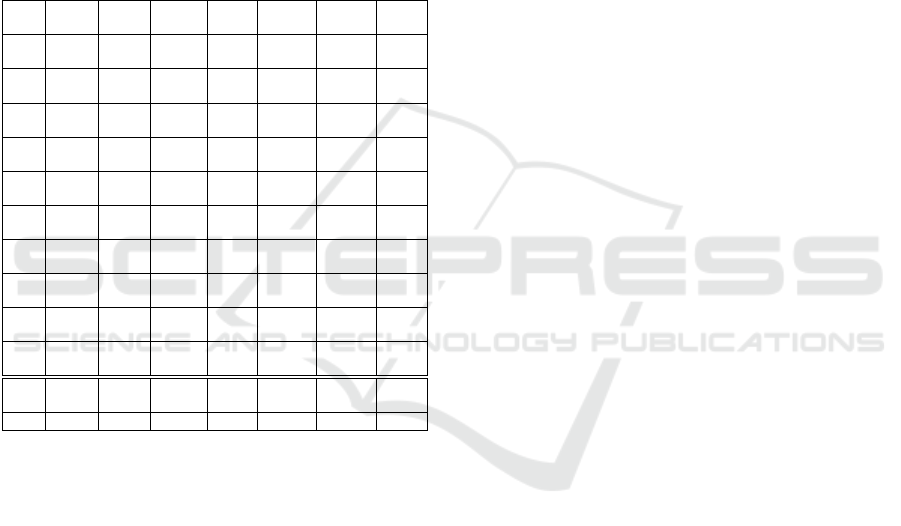
The correlation matrix of input variables is shown
in Fig. 4 for the category of small stores. The order
of the variables was chosen according to the corre-
Prediction of Store Demands by Decision Trees and Recurrent Neural Networks Ensemble with Transfer Learning
221
lation value to make clusters of similar stores more
noticeable. As expected, w has a positive and d nega-
tive correlation with all stores. Very high correlations
should be noted: s
2
, s
5
and s
10
group, s
3
, s
4
and s
8
group and s
6
to s
7
. These groups of stores have com-
mon ordering habits (mostly ordering on the same day
of the week), which makes the common model more
adjusted to them. The variables d and w are mainly
used to identify the days with orders, which is evident
from their correlations (both have similar correlations
to each of the stores, especially w).
Figure 4: Correlation matrix of all models inputs.
The insertion of a rolling average on the input and
a slack variable that gives 1 on days when there is
a demand, and 0 when there is no demand, is also
tested. However, these variables did not prove to be
beneficial for the models.
In Fig. 3, several outliers can be seen. They are
corrected using the 2σ rule. When calculating out-
liers, days without deliveries are not considered, and
too big values of demands are corrected using the for-
mula:
s
i, j
= max(s
i, j
, s
i,avgp
+ 2 · s
i,stdp
+ 0.1 · s
i, j
), (2)
where s
i,avgp
and s
i,stdp
are average and standard de-
viation of positive s
i, j
values. In this way, an average
of 3 outliers per store is corrected.
Datasets in RNN models are separated chronolog-
ically into parts for training, validation and test in the
ratio of approximately 60%-20%-20%, and in GBDT
methods they are separated into parts for training and
test in the ratio 80%-20%. For RNN methods, Min-
Max scaler with [0, 1] limits is used.
4.2 Hyperparameters Selection
After selecting inputs, prediction models are created.
Grid search is applied to all models. The best ob-
tained hyperparameter values for the XGBoost and
LightGBM models are shown in Table III. Table IV
shows parameters for LSTM, GRU, LSTM with trans-
fer learning and GRU with transfer learning.
Table 3: XGBoost and LightGBM hyperparameters.
XGBoost LightGBM
reg lambda = 0.15 min data in leaf = 20
reg alpha = 0.004 num leaves = 10
subsample = 0.4 subsample = 0.7
colsample bytree = 0.4 subsample freq = 5
max depth = 4 max depth = 5
n estimators = 500 colsample bytree = 0.7
learning rate = 0.01 learning rate = 0.04
Table 4: RNN methods hyperparameters.
Hyper- LSTM GRU LSTM GRU
parameter transfer transfer
LSTM(40) GRU(40) LSTM(40) GRU(40)
Dropout(0.2) Dropout(0.1) Dropout(0.2) Dropout(0.2)
Layers LSTM(40) GRU(25) LSTM(40) GRU(40)
Dropout(0.2) Dropout(0.1) Dropout(0.2) Dropout(0.2)
LSTM(1) GRU(1) LSTM(1) GRU(1)
Transfer lear- / / LSTM(25) GRU(25)
ning layers LSTM(1) GRU(1)
Loss RMSE RMSE RMSE RMSE
functions MAE* MAE* MAE* MAE*
Optimizer Adam Adam Adam Adam
Learning rate 0.003 0.003 0.002 0.002
0.001** 0.001**
Epochs 200 200 200 200
30** 30**
Batch size 50 50 50 50
Used for evaluation only, not in training
Refers to the learning of an individual part of a model
4.3 Post-processing and Ensemble
Model
After selecting the hyperparameters, 6 models are
trained and predictions are obtained. RNN prediction
values are scaled back to the original range to be com-
parable to GBDT methods. After that, all predictions
values less than a quarter of the mean value are sat-
urated to 0. An ensemble of the four most accurate
models has been created, which gives the weighted
average of the output of these four models at the out-
put. The predictions of the ensemble model are cal-
culated by:
p
i, j(e)
= 0.1p
i, j(1)
+0.2p
i, j(4)
+0.25p
i, j(5)
+0.45p
i, j(6)
,
(3)
where p
i, j(e)
is ensemble prediction, p
i, j(1)
is XG-
Boost prediction, p
i, j(4)
is GRU prediction, p
i, j(5)
is
LSTM with transfer learning prediction and p
i, j(6)
is
GRU with transfer learning prediction.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
222
5 EXPERIMENT AND RESULTS
5.1 Small Stores
All models are tested on test sets for 10 small stores.
Table V shows the results. The upper values for
each store refer to Root Mean Squared Error (RMSE)
and the lower values to Mean Absolute Error (MAE).
RMSE is observed as the main metric. In addition to
the results for all 10 stores individually, average errors
and the time in seconds required to learn the model for
all 10 stores are added.
Table 5: Comparison of prediction accuracy for small stores
category.
store XG- Light- LSTM GRU LSTM GRU ens-
Boost GBM transfer transfer amble
s1 265.0 271.2 256.6 277.2 258.1 264.0 252.2
151.8 151.8 140.1 136.2 140.2 142.3 135.6
s2 140.2 145.3 142.1 136.1 134.4 126.0 127.1
67.2 69.7 58.3 55.3 61.0 56.8 57.9
s3 341.7 352.8 329.2 335.8 338.5 305.2 307.3
198.2 204.0 187.7 177.9 178.2 174.3 168.8
s4 188.8 196.9 197.9 181.0 172.5 174.2 166.9
101.9 109.3 127.3 95.8 94.1 98.2 92.8
s5 119.5 129.1 127.0 121.8 93.9 102.5 98.3
53.1 58.0 52.9 55.2 43.1 48.4 46.1
s6 171.7 184.4 224.5 168.8 169.5 161.3 156.0
82.2 89.8 124.7 82.7 75.8 81.0 77.6
s7 108.9 117.2 141.1 94.7 98.6 89.3 88.9
44.8 50.7 88.3 45.5 43.2 42.3 41.7
s8 307.7 345.6 287.1 303.6 354.4 302.1 301.7
153.6 176.1 144.9 158.4 179.5 158.0 157.9
s9 175.7 179.3 189.4 171.4 175.3 159.7 160.6
95.8 95.1 103.3 101.9 95.0 86.1 89.6
s10 150.2 151.5 159.1 151.0 129.4 134.2 132.6
72.7 74.8 68.0 73.4 57.8 64.9 62.9
avg. 197.0 207.3 206.4 194.1 192.5 181.9 179.2
102.1 107.9 109.6 98.2 96.8 95.2 93.1
Time
4.9 1.8 255.6 196.7 169.7 140.7 512.0
Upper values in the rows denote RMSE, lower are for MAE
Table shows that the XGBoost method gives bet-
ter accuracy than LightGBM, and the GRU is more
accurate than LSTM, according to RMSE and MAE.
Two models using transfer learning compared to the
same methods without transfer learning achieve sig-
nificant progress: 9% for LSTM and 5% for GRU.
Transfer learning brings the greatest progress in s
5
and s
10
stores, which together with s
2
make up the
group of stores with the highest correlations (Fig. 4).
It is concluded that, by increasing the number of ob-
served stores, transfer learning could bring an addi-
tional advantage in the accuracy of predictions. In
that case, instead of separating stores according to the
number of deliveries, it would be good to use some
more advanced form of clustering. The ensemble of
4 best methods provides the best results as expected,
2% better than GRU with transfer learning.
Part of the predictions from Table V are also
shown in Fig. 5. The figure shows the 45 days of pre-
dictions given by the algorithm on the test set of the
s3 store. Predictions from the figure omit described
post-processing (saturation to zero) for the purpose
of better illustration. During the usual, steady-state,
schedule of order days, all models give similar predic-
tions. A higher difference in accuracy occurs on days
when the order schedule changes rapidly. The sched-
ule has changed on 8.10.2019., which greatly influ-
enced the predictions for the following days. Models
with XGBoost and LightGBM do not change the be-
havior much, LSTM partially changes the behavior,
and the other 3 models adapt more to the new behav-
ior, especially the GRU model with transfer learning.
Precisely, such situations are the biggest advantage of
transfer learning methods. The disadvantage of these
methods may be the learning speed at which XGBoost
and LightGBM are far better. Nevertheless, all tested
algorithms are fast enough for this application. Ap-
plications such as TDVRP in which predictions are
made for each of the two store combinations should
also consider the speed component.
5.2 All Stores
The algorithms are tested on a set of 10 medium and a
set of 10 large stores. Table VI lists RMSE and MAE
for all 3 types of stores. The results for medium and
large stores are similar to those for the small ones.
Predictions with GBDT and RNN methods have sim-
ilar results, and transfer learning brings advances in
models with an emphasis on smaller stores. The best
results are obtained using an ensemble of a few meth-
ods. The results of the ensemble of methods are com-
pared with a model that copies occurrences from 7
days ago for working days and predicts 0 for non-
working days. A 57% lower loss is obtained for small
stores, 60% lower for medium, and 54% for large
ones. Such persistence model gives RMSE = 412.4kg
and MAE = 221.8kg for all 10 observed test datasets
of 4 months for the small stores, i.e. the ensemble
approach provides 57% improvement in prediction
accuracy. For the medium and the large stores, en-
semble provides 60% and 54% improvement, respec-
tively, while the most evident improvement is during
rapid changes in stores demand. This is of great ben-
efit to Multi Period VRP because prediction of total
weight of order directly affects the number of vehi-
cles, overtime hours, but also the total cost of deliv-
ery.
Prediction of Store Demands by Decision Trees and Recurrent Neural Networks Ensemble with Transfer Learning
223

Figure 5: Comparison of prediction accuracy for all tested methods.
Table 6: Comparison of prediction accuracy for all stores
categories.
stores XG- Light- LSTM GRU LSTM GRU ens-
size Boost GBM transfer transfer amble
small 197.0 207.3 206.4 194.1 192.5 181.9 179.2
102.1 107.9 109.6 98.2 96.8 95.2 93.1
medi- 645.1 660.1 688.5 639.6 654.1 638.7 616.8
um 346.5 345.4 355.6 330.9 338.3 329.3 322.2
large 2398 2385 2470 2467 2621 2368 2339
1670 1647 1692 1699 1832 1660 1647
Upper values in the rows denote RMSE, lower are for MAE
6 CONCLUSION
In this paper, machine learning methods for predic-
tion of delivery capacities in last-mile logistics are
tested. These predictions are important to enable
the use of Multi Period VRP. Predictions are gener-
ated using Gradient Boosting Decision Tree methods
(XGBoost and LightGBM) and methods of Recurrent
Neural Networks (LSTM, GRU and their variations
using transfer learning). Real historical datasets are
used, divided into 3 categories according to store size.
At the inputs of all algorithms are the historical mass
values of the store order and slack variables depict-
ing working days and day of the week. Preprocess-
ing and post-processing are applied. Among the men-
tioned methods, GRU with transfer learning proves
to be the most accurate. Transfer learning generally
brings an improvement over the same metrics without
transfer learning, GRU is more accurate than LSTM,
and XGBoost is more accurate than LightGBM. RNN
methods are more accurate than GBDT methods for
small and medium-sized stores where orders are more
volatile, and GBDT methods are more accurate in
large stores. Eventually an ensemble of these methods
is generated which, as expected, gives the most accu-
rate predictions (2% compared to GRU with transfer
learning and 57% compared to persistence model).
ACKNOWLEDGEMENTS
This work has been supported by the European
Union from the European Regional Development
Fund via Operational Programme Competitiveness
and Cohesion 2014-2020 for Croatia through the
project Research and development of a unified sys-
tem for logistic and transport optimisation - Collab-
orative Elastic and Green Logistics - CEGLog (grant
KK.01.2.1.02.0081). The authors would like to thank
GDi Group for their collaboration.
REFERENCES
Anzar, T. (2021). Forecasting of Daily Demand’s Order Us-
ing Gradient Boosting Regressor BT - Progress in Ad-
vanced Computing and Intelligent Engineering. pages
177–186, Singapore. Springer Singapore.
Braekers, K., Ramaekers, K., and Van Nieuwenhuyse, I.
(2016). The vehicle routing problem: State of the art
classification and review. Computers & Industrial En-
gineering, 99:300–313.
Chaurasia, V. and Pal, S. (2020). Application of machine
learning time series analysis for prediction COVID-19
pandemic. Research on Biomedical Engineering.
Chen, R. M. and Fang, P. J. (2019). Solving Vehicle Routing
Problem with Simultaneous Pickups and Deliveries
Based on A Two-Layer Particle Swarm optimization.
In 2019 20th IEEE/ACIS International Conference
on Software Engineering, Artificial Intelligence, Net-
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
224

working and Parallel/Distributed Computing (SNPD),
pages 212–216.
Chen, T. and Guestrin, C. (2016). XGBoost: A scalable tree
boosting system. Proceedings of the ACM SIGKDD
International Conference on Knowledge Discovery
and Data Mining, 13-17-August-2016:785–794.
Chung, J., Gulcehre, C., Cho, K., and Bengio, Y. (2014).
Empirical Evaluation of Gated Recurrent Neural Net-
works on Sequence Modeling. pages 1–9.
Dantzig, G. B. and Ramser, J. H. (1959). The Truck Dis-
patching Problem. Management Science, 6(1):80–91.
Fu, R., Zhang, Z., and Li, L. (2016). Using LSTM and
GRU neural network methods for traffic flow predic-
tion. In 2016 31st Youth Academic Annual Conference
of Chinese Association of Automation (YAC), pages
324–328.
Gillett, B. E. and Miller, L. R. (1974). A Heuristic Algo-
rithm for the Vehicle-Dispatch Problem. Operations
Research, 22(2):340–349.
He, Q., Pang, P. C.-I., and Si, Y. W. (2019). Transfer Learn-
ing for Financial Time Series Forecasting. pages 24–
36.
Hochreiter, S. and Schmidhuber, J. (1997). Long Short-
Term Memory. Neural Computation, 9(8):1735–1780.
Hod
ˇ
zi
´
c, K., Hasi
´
c, H., Cogo, E., and Juri
´
c,
ˇ
Z. (2019).
Warehouse Demand Forecasting based on Long Short-
Term Memory neural networks. In 2019 XXVII Inter-
national Conference on Information, Communication
and Automation Technologies (ICAT), pages 1–6.
Ke, G., Meng, Q., Finley, T., Wang, T., Chen, W., Ma,
W., Ye, Q., and Liu, T. Y. (2017). LightGBM: A
highly efficient gradient boosting decision tree. Ad-
vances in Neural Information Processing Systems,
2017-December(Nips):3147–3155.
Lau, H. C. W., Chan, T. M., Tsui, W. T., and Pang,
W. K. (2010). Application of Genetic Algorithms to
Solve the Multidepot Vehicle Routing Problem. IEEE
Transactions on Automation Science and Engineer-
ing, 7(2):383–392.
Mackenzie, J., Roddick, J. F., and Zito, R. (2019). An Eval-
uation of HTM and LSTM for Short-Term Arterial
Traffic Flow Prediction. IEEE Transactions on Intel-
ligent Transportation Systems, 20(5):1847–1857.
Mancini, S. (2016). A real-life Multi Depot Multi Pe-
riod Vehicle Routing Problem with a Heterogeneous
Fleet: Formulation and Adaptive Large Neighborhood
Search based Matheuristic. Transportation Research
Part C: Emerging Technologies, 70:100–112.
Nagata, Y. and Br
¨
aysy, O. (2009). Edge Assembly based
Memetic Algorithm for the Capacitated Vehicle Rout-
ing Problem. Networks, 54:205–215.
Nazari, M., Oroojlooy, A., Tak
´
a
ˇ
c, M., and Snyder, L. V.
(2018). Reinforcement learning for solving the vehi-
cle routing problem. Advances in Neural Information
Processing Systems, 2018-Decem:9839–9849.
Pavlyuk, D. (2017). Short-term Traffic Forecasting Using
Multivariate Autoregressive Models. Procedia Engi-
neering, 178:57–66.
Rochat, Y. and Taillard,
´
E. D. (1995). Probabilistic diversi-
fication and intensification in local search for vehicle
routing. Journal of Heuristics, 1(1):147–167.
Siami-Namini, S., Tavakoli, N., and Namin, A. S. (2018).
A Comparison of ARIMA and LSTM in Forecast-
ing Time Series. In 2018 17th IEEE International
Conference on Machine Learning and Applications
(ICMLA), pages 1394–1401.
Solomon, M. M. (1987). Algorithms for the Vehicle Rout-
ing and Scheduling Problems with Time Window
Constraints. Operations Research, 35(2):254–265.
Tan, C., Sun, F., Kong, T., Zhang, W., Yang, C., and Liu,
C. (2018). A Survey on Deep Transfer Learning BT
- Artificial Neural Networks and Machine Learning –
ICANN 2018. pages 270–279, Cham. Springer Inter-
national Publishing.
Tarantilis, C. D., Zachariadis, E. E., and Kiranoudis, C. T.
(2009). A Hybrid Metaheuristic Algorithm for the
Integrated Vehicle Routing and Three-Dimensional
Container-Loading Problem. IEEE Transactions on
Intelligent Transportation Systems, 10(2):255–271.
Wanchoo, K. (2019). Retail Demand Forecasting: a Com-
parison between Deep Neural Network and Gradient
Boosting Method for Univariate Time Series. In 2019
IEEE 5th International Conference for Convergence
in Technology (I2CT), pages 1–5.
Wang, J., Zhou, Y., Wang, Y., Zhang, J., Chen, C.
L. P., and Zheng, Z. (2016). Multiobjective Vehicle
Routing Problems With Simultaneous Delivery and
Pickup and Time Windows: Formulation, Instances,
and Algorithms. IEEE Transactions on Cybernetics,
46(3):582–594.
Wen, M., Cordeau, J.-F., Laporte, G., and Larsen, J.
(2010). The dynamic multi-period vehicle rout-
ing problem. Computers & Operations Research,
37(9):1615–1623.
Zhang, G. (2003). Time series forecasting using a hybrid
ARIMA and neural network model. Neurocomputing,
50:159–175.
Prediction of Store Demands by Decision Trees and Recurrent Neural Networks Ensemble with Transfer Learning
225
