
Spike-time Dependent Feature Clustering
Zachary S. Hutchinson
a
School of Computing and Information Science, University of Maine, Orono, Maine, U.S.A.
Keywords:
Dimensionality Reduction, Feature Clustering, Spiking Neural Networks, Artificial Dendrites.
Abstract:
In this paper, we present an algorithm capable of spatially encoding the relationships between elements of
a feature vector. Spike-time dependent feature clustering positions a set of points within a spherical, non-
Euclidean space using the timing of spiking neurons. The algorithm uses an Hebbian process to move feature
points. Each point is representative of an individual element of the feature vector. Relative angular distances
encode relationships within the feature vector of a particular data set. We demonstrate that trained points can
inform a feature reduction process. It is capable of clustering features whose relationships extend through time
(e.g., spike trains). In this paper, we describe the algorithm and demonstrate it on several real and artificial
data sets. This work is the first stage of a larger effort to construct and train artificial dendritic neurons.
1 INTRODUCTION
Every data set describes a small world. The events
or objects which make up these world are typically
represented by an N-dimensional vector of features.
When N is large the shape of these worlds becomes
hard to grasp because doing so requires insight into
the N × N feature relationships which are dispersed
across all elements of the data set.
Dimensionality reduction (DR) aids in under-
standing these small worlds by reducing the number
of feature relationships. In general, DR is divided
into two areas: feature selection (FS) and feature ex-
traction (FE). FS is the process of choosing a sub-
set of the original features (Chandrashekar and Sahin,
2014). FE reduces the feature vector by casting it via
a transformation into a reduced space (Khalid et al.,
2014). The majority of DR methods rely on a mea-
surement of feature importance. This measurement
is used either in the selection process (FS) or is con-
tained within the transformation of the set of features
into a reduced space (FE).
Spike-time dependent feature clustering (SFC)
provides a new way to measure relationships between
features. SFC encodes feature relationships in the rel-
ative positions of representative points within a spher-
ical space. Hebbian learning (Hebb, 2005), driven by
individual feature values, is used to move the points
toward or away from one another. Hebbian learning is
a theory of neural plasticity which posits that changes
a
https://orcid.org/0000-0001-7584-0803
in the brain are in part caused by the temporal prox-
imity of two or more spikes emitted by connected
neurons. As a result, proximity within the spherical
space is the product of (dis)similarities between fea-
tures within the data set. And each feature relation-
ship dispersed throughout the data set is compressed
into a single angular distance between two points.
Once a data set is encoded, traditional clustering or
FS algorithms can be used to extract important fea-
tures. An optimal method of identifying the resulting
clusters--shape, size, or density--is beyond the scope
of this paper.
2 ALGORITHM DESCRIPTION
The clustering process uses a spiking neural network
(SNN) (Maass, 1997). A SNN consists of spiking
neurons which emit a pulse or spike when an inter-
nal value reaches a threshold. A change in input
does not immediately cause a change in neural output
but rather an output spike is a product of input over
time. Therefore, the relative timing of spikes encodes
a neuron’s recent input history. For this project, we
use the Izhikevich spiking neuron model (Izhikevich,
2007). The Izhikevich model consists an equation for
v, the membrane potential, and u, the recovery cur-
rent (Eqs. (1) and (2)). A neural spike (v ≥ v
peak
)
is modeled by a reset (v ← c, u ← u + d). The pa-
rameters used in the Izhikevich model are those given
in (Izhikevich, 2007) for a regular spiking neuron:
188
Hutchinson, Z.
Spike-time Dependent Feature Clustering.
DOI: 10.5220/0010799100003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 188-194
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: Movement across the spherical field. Three points
(A, B, and C) correspond to three inputs. O is the field’s
origin. A spike in A’s neuron causes A to move toward B
and C based on how recently their neurons emitted a spike.
C = 100, v
r
− 60, v
t
= −40, k = 0.7, v
peak
= 35, a =
0.03, b = −2, c = −50, d = 100.
C ˙v = k(v − v
r
)(v − v
t
) − u + I (1)
˙u = a{b(v − v
r
) − u} (2)
Spike-time dependent clustering utilizes a single
layer of spiking neurons. The spiking neurons trans-
form values in the examples to a time series of spikes.
Each neuron is connected to a unique point in the
spherical space. For all experiments, initial point po-
sitions are uniformly randomized over a unit shell
(identical radius). We refer to the spherical space (or
shell) occupied by the points as the field. The dis-
tance between two points is then the angle of separa-
tion with respect to the origin (e.g., ∠AOB in Figure
1 gives the distance between A and B).
The co-activity of input neurons causes their as-
sociated points to change position. Co-activity is
defined as the temporal proximity of two (or more)
spikes. Temporal proximity is a model hyperparam-
eter given by W in the equations below. In Figure
1, a spike at A causes it to move toward B and C.
The magnitude of change depends on how recently
the neurons connected to B and C have spiked. In this
example, C’s neuron has spiked more recently than
B’s. Therefore, A’s movement toward C is greater (or
∠1O2 > ∠AO1). Lastly, point 2 would give the new
location of A.
Co-activity is bounded by the learning window,
W . The learning window determines the maximum
temporal distance between two spikes that can affect
positional change. The learning window for all ex-
periments was set to 100 time steps. Furthermore,
the length of the learning window partitions measure-
ments of the field. In other words, the learning win-
dow divides the maximum angular distance between
two points, or π, giving discrete distance markers to-
ward which points move. The goal marker of any
given instance of co-activity is the temporal distance
between two spikes. For example, if the learning win-
dow is set to 100 time steps, and one neuron routinely
spikes 50 time steps before another, the latter’s point
will move toward a location
π
2
distance away from the
former.
Point movement also depends on the sign and
strength of an error signal. For all experiments, the
error signal is within the range [−1, 1]. Negative er-
ror values cause co-activity to drive points apart (see
Equation (4)). Negative error values can be used to
separate points involved in unwanted co-activity dur-
ing a training process. Or, as they are used in several
of the following experiments, negative values can sep-
arate clusters or partition active and inactive points.
3 EXPERIMENTS
We tested the algorithm’s clustering ability on artifi-
cial and real-world data sets. The goal of these exper-
iments was to discover whether point clusters formed
by the algorithm revealed underlying patterns in the
data sets. Although the types of input used across
the four experiments were different, we attempted to
make these differences invisible to the network. All
input signals were transformed into spike trains using
a Poisson process. Parameters intrinsic to the neural
and point models were identical through all experi-
ments.
Experiments 3.1 and 3.2 create patterns by using
spike trains with a similar spike rate (e.g., 100 Hz).
The spike trains themselves are randomly created by a
Poisson process. Neurons that do not belong to a pat-
tern are given a lower spike rate (e.g., 10 Hz) to sim-
ulate noise. Each input spike train is 1,000 time steps
in length. An iteration consists of one spike train
from each type of pattern and/or mask, and their order
within an iteration is random. A mask is a pattern-less
set of spike trains used in conjunction with a nega-
tive error signal to drive points away from each other.
Spikes produced by the Poisson process decayed over
time at a rate of e
−0.1t
where t is the time since the last
spike. Input spikes were scaled by a weight of 500.
3.1 Two Overlapping Patterns
For this experiment, one hundred input neurons were
divided into two overlapping patterns, A and B (see
Figure 2). Each pattern consists of fifty-five 100 Hz
and forty-five 10 Hz inputs. The inputs receiving
stronger input represent the pattern and the weaker
Spike-time Dependent Feature Clustering
189
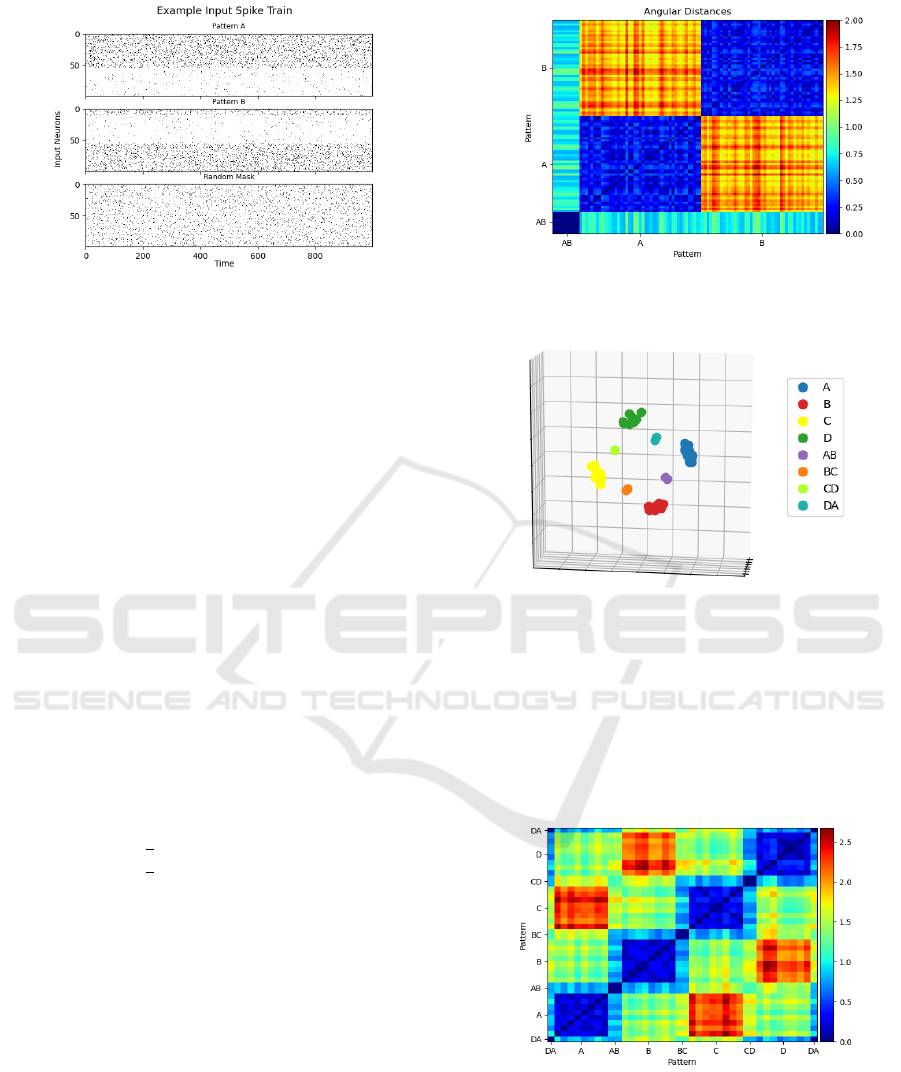
Figure 2: An example spike train for one iteration of both
patterns and the random mask. Pattern A: 100 Hz inputs
0-54, 10 Hz 55-99. Pattern B: 100 Hz inputs 0-9 and 55-99,
10 Hz 10-54. Mask: 50 Hz inputs 0-99.
inputs represent noise. Ten of the stronger 100 Hz
inputs are shared by both patterns. The network was
shown 5,000 iterations. Included in each iteration was
a random mask of identical length during which all
neurons received an input of 50 Hz.
The treatment of the mask pattern differed from
patterns A and B in that the accompanying error sig-
nal was negative (e.g., -1). For A and B, the error
value is 1. The mask was included in this (and the
following experiment) to separate clusters within the
field.
Figure 3 shows the resulting point-by-point angu-
lar distances with points grouped by patterns along
each axis. Points unique to a pattern cluster together
(large dark blue patches). These clusters occupy dis-
joint areas of the dendritic field (opposing warm col-
ors). The shared points form a separate cluster distinct
from the two larger clusters of unique points. The
shared cluster is approximately equidistant from the
rest of patterns A and B. Two points taken from A and
B are on average
π
2
radians from one another and the
shared points are
π
4
from the unique points. In a sim-
plified version of this experiment in which patterns A
and B are composed of disjoint sets of points, clus-
ters polarize within the field and the distance between
points in opposing clusters is approximately π.
Shared points cause patterns to draw closer to-
gether. The greater the overlap, the closer the clus-
ters. This effect can be seen to a greater extent in the
experiment involving four overlapping patterns.
3.2 Four Overlapping Patterns
Next, we expanded the number of patterns and the
degree and complexity with which they overlapped.
Each pattern (A, B, C, and D) is comprised of twelve
neurons. Four of the twelve neurons form two pairs
Figure 3: Resulting point-point angular distances grouped
by pattern after 5,000 iterations. The overlapping points
can be seen on the bottom left.
Figure 4: Point locations after 16,000 iterations. Colors in-
dicate which pattern(s) each point belongs to.
which are shared with two other patterns (AB, BC,
CD and DA). The goal of this experiment was to in-
vestigate whether resulting clusters would themselves
cluster in such a way to resemble meta-patterns within
the input data set. All parameters were unchanged
except for the number of iterations which were in-
creased to 16,000.
Figure 5: Resulting point-point angular distances grouped
by pattern. Distance is measured in radians.
Points belonging wholly to one pattern cluster
tightly together while shared points come to rest be-
tween the clusters of their dual membership. The
meta-pattern formed by these clusters demonstrates a
kind of adjacency via shared points. Patterns which
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
190
do not share points (i.e., A and C) oppose each other
spatially. There is a clear distinction between the av-
erage angular distance separating points of adjacent
versus non-adjacent patterns.
Several more versions of this experiment were run
which included more patterns and more complex pat-
tern overlap. Additionally, we examined whether SFC
was capable of fuzzy membership (continuous range
of rates), subpatterns (stepped rates) and additional
meta-patterns (hierarchy of rates in overlapping neu-
rons). These additional experiments reinforced the re-
sults evident in these simpler versions.
3.3 iBeacon Locations
The two previous experiments made use of artificially
generated data sets. Such sets can be large enough
to cover the relatively simple sample space of the en-
tire feature vector. To understand how well spike-time
dependent clustering works with sparse, real-world
data sets, we attempted to reproduce the placement
of iBeacons from a machine learning data set (Mo-
hammadi et al., 2017) of RSSI readings taken from
the UCI Machine Learning database (Dua and Graff,
2017).
Since SFC can train points using an unsupervised
process, we were able to use the entire data set (train-
ing and testing). We removed all entries that did not
contain two or more RSSI signals greater than the
baseline (-200). In isolation single signal entries cre-
ate no spatial association between beacons. Keeping
with the other three experiments, the order of readings
was randomized each iteration; therefore, associa-
tions between single signals could not be based on the
historical route taken through the space by the origi-
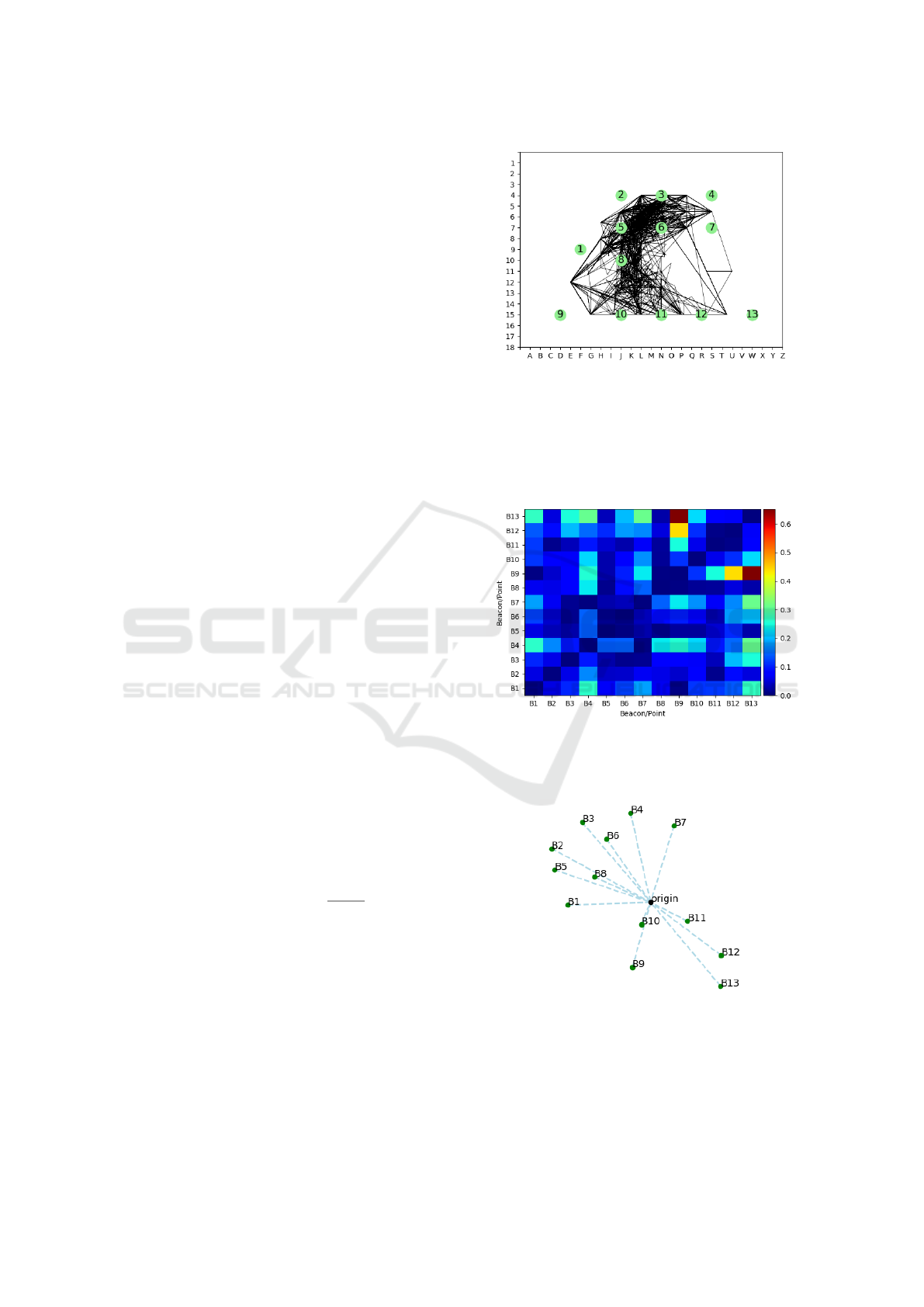
nal researcher. Figure 6 shows the grid-based place-
ment of the iBeacons from which beacon-to-beacon
distances were taken.
This modified data set was used as input to a
network with thirteen neurons (one for each bea-
con). RSSI signals were transformed into constant
rate input by the equation I
b
=
S
b
+200
200
for all b ∈
{0, 1, . . . , 12, 13} which was then used to generate an
input spike train. S
b
is the RSSI signal for iBeacon b
and I
b
is the corresponding input. An iteration con-
sisted of one full pass through the modified data set.
Between iterations entry order within the data set was
randomized.
To analyze the results we compared real-world
distances to the final positions generated by the al-
gorithm. First, both the angular distance of points
and iBeacon Cartesian distances were normalized us-
ing min-max normalization. The absolute value of
their difference was then taken and treated as the error
Figure 6: Reproduction of the iBeacons’ physical positions
(green numbered circles) with the paths produced by en-
tries with multiple signals in both labeled and unlabeled
data sets (black lines). Indoor features of the original map
have been omitted. iBeacon positions have been adjusted
slightly to align perfectly with the nearest row and column.
Path vertices are average locations (without respect for sig-
nal strength).
Figure 7: Absolute element-wise differences of distances
between point and iBeacon positions. Point-to-point and
iBeacon-to-iBeacon distances were normalized using min-
max norm before the difference was taken.
Figure 8: Point positions within the dendritic field result-
ing from 500 iterations. Light blue lines orient points to
the origin and give a sense of depth. Labels indicate which
iBeacon is associated with each point.
rate. Figure 7 depicts this error after 500 training iter-
ations. To establish a baseline, we generated random
Spike-time Dependent Feature Clustering
191
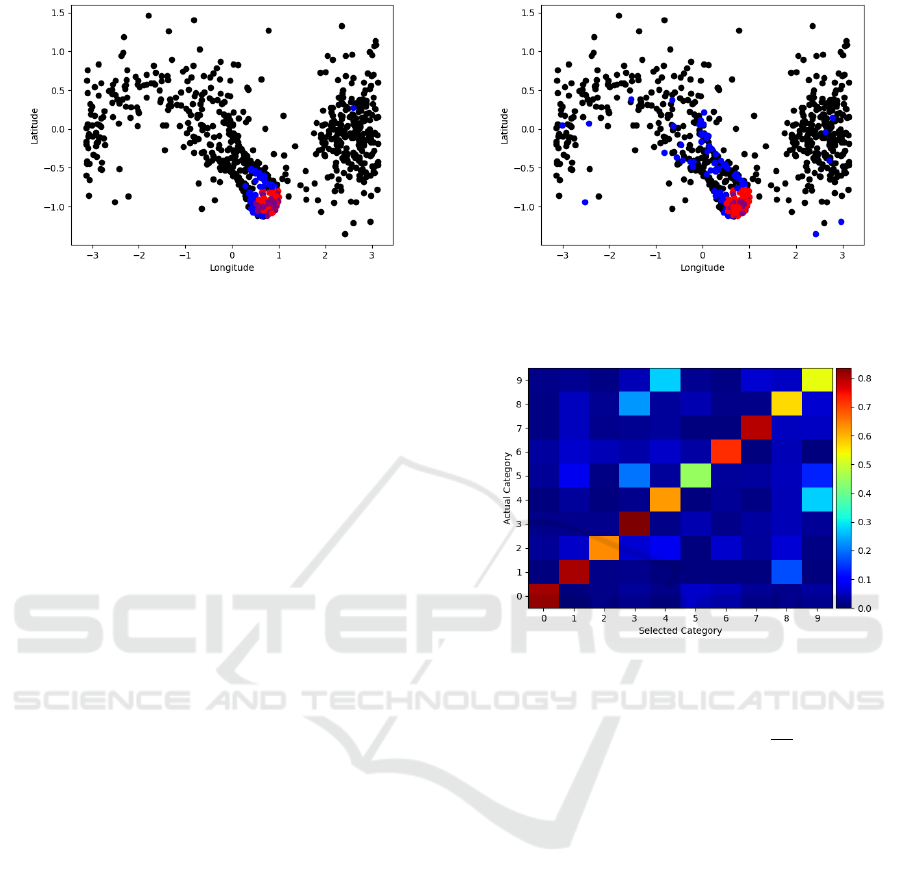
Figure 9: Digit-9 point locations. Red points indicate points
used to identify digit-9 images in the test set. Blue is the
same for digit-4. Purple are overlapping points.
point positions and compared them using the above
procedure. The error produced by random placements
(100,000 trials) had a mean of 23.7% and average me-
dian of 20.1%; whereas differences with final point
position after 500 iterations had a mean of 10.5% and
median of 7.1%.
The relative positions of trained points roughly
correspond to actual iBeacon placement (Figure 8).
Distortions are due to examples with overlapping sig-
nals that cover either a broad (> 2 beacon signals)
or discontinuous (e.g., beacon 2 and 4 are heard but
not 3) area. The largest error between beacons 9 and
13 appears to be caused by the frequent simultane-
ous hearing of beacons 11 through 13 and the lack of
signal overlap between these and 6 and 7. The latter
is due to a lack of direct paths between 6-7 and 11-
13 owing to obstacles (see original map). The same
can be seen in the points 1 and 2 with respect to 5.
Within the indoor space, there is no direct path from
1 to 2 without passing 5; therefore, points 1, 5 and 2
form a straight line across the field. This suggests that
the map of trained points represents obstacles as well
as iBeacon proximity and is a product of both actual
beacon location and available paths.
3.4 MNIST
How can the points of a trained field facilitate useful
dimensionality reduction? To answer this question,
we trained ten networks on the training set of im-
ages of the MNIST handwritten image database (Le-
Cun et al., 2010) and investigated whether their points
could be used to identify the categories of testing im-
ages.
The method of training was similar to that used
to train the overlapping Poisson experiments. Image
pixel intensities were used to generate Poisson pro-
cess spike trains which were used as inputs to 784
Figure 10: Digit-9 point locations. Red dots indicate points
used to identify digit-9 images in the test set. Blue is the
same for digit-2. Purple are overlapping points.
Figure 11: Accuracy matrix showing what percent of each
image (by category) is identified as belonging to a particular
category.
neurons. Rate was determined by
I
p
255
where I
p
is
the intensity (0-255) of pixel p. Each network was
trained on the full set of testing images of a specific
category. After every ten images the networks were
shown a random mask with all inputs spiking at 50
Hz and provided an error value of -1. This caused the
inactive points to move away from clustered points.
Next we investigated whether tightly clustered
points within the trained field could be used to rec-
ognize images from the test set. Clusters were iden-
tified by summing the angular distances of each point
to all other sibling points and selecting the N points
with the smallest summed angular distance. To find
N, we tried several values: 20, 50, 100, 150 and 200.
N = 100 produced the best results. It is likely that
optimal results per network require a different N.
For each training image, we summed the intensi-
ties of the pixels which corresponded to the selected
points of each trained field. The field with the max-
imum value identified the selected category. Results
are shown in Figure 11.
The accuracy of each image category corresponds
to a degree of overlap between two sets of selected
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
192

points. This can be seen in Figures 9 and 10. Digit-9
images were most often mistaken by this method to
be digit-4 images (27.5%) and least often to be mis-
taken as digit-2 images (0.4%). The points belong-
ing to the digit-9 and digit-4 clusters overlap signif-
icantly (Fig. 9). They share 61 points which corre-
spond to the same pixels. This stands in contrast to the
digit-9 and digit-2 clusters which share only 30 (Fig.
10). Interestingly, the non-overlapping points of digit-
9 and digit-4 clusters show a greater degree of cluster-
ing within the field than those of digit-9 and digit-2.
The greater the overlap and lower the element-wise
inter-cluster distance the lower the accuracy due to
misidentification.
We chose a simple cluster identification method
(min of the sum of angular distances) for this experi-
ment to emphasize that accuracy depends on field po-
sition and not additional cluster analysis. That said,
more complex point selection algorithms which ex-
amine the shape and size of clusters as well as degrees
of membership are likely to produce better results. As
shown in the iBeacon experiment, the shape of a clus-
ter can encode hidden information. More complex
cluster analysis is left for future work.
4 METHODS
This section gives the methods governing the move-
ment of points within the field. The process is Heb-
bian in nature in that it is based on the relative timing
of afferent spikes.
t
i
δ
= t
i
c
−t
i
p
(3)
t
i
δ
in Eq. 3 gives the length of time between the
current and previous spike of neuron i. t
i
c
is the time
stamp of the current input spike received by point i.
t
i
c
is equivalent to the current simulation time step as
angular movement is enacted immediately. t
i
p
is the
time stamp of the previous input spike received by
point i.
F
i
=
(t
i
δ
+W )
W
e
−t
i
δ
W
E (4)
Eq. 4 gives a scalar to positional change based on
the length of time between neuron i’s two most recent
spikes. W represents the effect of time. Higher val-
ues allows longer inter-spike intervals to impact point
movement. W is fixed throughout the simulation at
100. Larger values slow temporal decay; smaller val-
ues increase it. t
i
δ
is taken from Eq. 3. E is the cur-
rent error value which is fixed at 1 (except for random
mask trials when it is set to -1). Negative values cause
co-activity to repel points.
Next, the recent activity of all sibling points is
evaluated. A copy of point i’s position,
˙
P
i
, is orbited
toward (or away from) all sibling points to determine
the direction and magnitude of movement for point i.
For all sibling points j, where i ̸= j we calculate the
following temporal distance.
t
i j
δ
= t
i
c
−t
j
c
(5)
t
j
c
is the time of neuron j’s most recent spike and
t
i
c
is the same as Eq. 3. Therefore, t
i j
δ
measures the
interval of time between i and j’s most recent spikes.
D
t
= π
t
i j
δ
W
(6)
D
t
represents the target angular distance between
point i and j. W is the same as given in Eq. 4. When
values of t
i j
δ
exceed W, the point is ignored.
D
i j
= D
c
− D
t
(7)
D
i j
in Eq. 7 is the difference between the current
angular distance (D
c
) between points i and j and their
target angular distance (D
t
from Eq. 6). This and the
value of F
i
form the magnitude of angular change of
point i toward point j (Eq. 8).
M
i j
= F
i
D
i j
(8)
˙
P
i
is then orbited across the spherical plane in the
direction of P
j
, the spherical position of j, by the mag-
nitude given by M
i j
.
Once all sibling points have been evaluated for
their effect on
˙
P
i
, the actual position of i, P
i
, is
changed. P
i
is orbited toward
˙
P
i
by the angular dis-
tance between them times the positional learning rate,
λ which is currently set to 0.01. This value is the re-
sult of a parameter sweep from 0.1 to 0.001.
5 DISCUSSION
Spike-time dependent clustering uses a Hebbian rule
to position points within a spherical field. Each point
is associated with one element of a feature vector. The
relative positions of trained points encode aspects of
the set of input examples. In the iBeacon experiment,
we showed that from overlapping RSSI signals we
can reproduce the approximate layout of the beacons
themselves. And in the MNIST experiment, we can
draw out a set of representative pixels which can be
used to identify image categories.
There are a number of challenges in applying this
approach to complex data sets. First, SFC assumes
each feature has a near unique position within the
Spike-time Dependent Feature Clustering
193

overall input space. If they do not, for instance if the
centering or rotation of MNIST digits were random-
ized, SFC’s results will be much degraded. Another
process would be needed to identify bounding boxes
and rotation. Alternatively, SFC could be used to con-
struct multiple layers of fields which, similar to parts
of the visual cortex, move from simple, invariant pat-
terns (lines) into more complex ones (digits).
Another challenge is the separation of patterns or
irrelevant (or inactive) features. All experiments ex-
cept the one involving iBeacon signals used random
masks and a negative error signal to create separa-
tion. Without a separating force, inactive features
will always occupy their initial position. Clusters do
not separate on their own. Cluster orientation and
position across the spherical field is relative. Irrele-
vant features could, by their starting position, insinu-
ate themselves into a cluster. It is our goal to find a
method by which masks are not necessary or at least
not for this purpose. A possible solution is the in-
clusion of polarity among points. A class of negative
points would attract positive co-active points but repel
each other.
Next, the order in which points move toward other
points matters. In Figure 1, a movement first toward
C and then B would produce a different new A. To
combat this, we randomize update order between each
iteration. The impact of update order is unknown.
However, without randomization, points have a ten-
dency to orbit the field while maintaining relative dis-
tances.
Co-activity depends on the length of the learning
window. If it is too short, co-activity over longer inter-
vals will be missed. If the window is too long, there is
a tendency for all points to form a single cluster. The
latter also depends on the shape of the Hebbian func-
tion. One possibility is to use multiple discrete win-
dows across different networks to identify long and
short term relationships. This aspect is a challenge of
neural plasticity algorithms and credit assignment in
general.
A significant problem in data analysis concerns
the identification of the number of classes within a
data set. In the MNIST experiment, we presupposed
the number of classes by training ten different sets
of points and selecting one set of features from each
field. In an unlabeled context, this is not possible.
One possibility for future research is to use SFC as a
wrapper where results from each iteration are used to
partition the data set for subsequent iterations.
In conclusion, we note that SFC is part of a larger
project to create artificial neurons with fully train-
able dendrites. Neuroscience evidence suggests that
dendritic neurons are computationally attractive (Mel,
1999). Such dendritic neurons would have expansive
dendritic trees in which synaptic (i.e., point) position,
tree shape, branch compartmentalization and synaptic
weights are all trainable parameters. Spike-time de-
pendent feature clustering describes the first stage of
this work: synaptic position on a spherical plane. SFC
has a second part not detailed in this paper. The sec-
ond half uses co-activity of input and output neurons
to adjust the radius of a point (or synapse). In other
words, this paper describes clustering due to input-
input co-activity, while the other half describes clus-
tering due to input-output co-activity. The second half
was not included because the goal of this work was
to show that input co-activity can be used to encode
small world information in the position of synapses in
a dendritic field.
REFERENCES
Chandrashekar, G. and Sahin, F. (2014). A survey on feature
selection methods. Computers & Electrical Engineer-
ing, 40(1):16–28.
Dua, D. and Graff, C. (2017). UCI machine learning repos-
itory.
Hebb, D. O. (2005). The organization of behavior: A neu-
ropsychological theory. Psychology Press.
Izhikevich, E. M. (2007). Dynamical systems in neuro-
science. MIT press.
Khalid, S., Khalil, T., and Nasreen, S. (2014). A survey of
feature selection and feature extraction techniques in
machine learning. In 2014 science and information
conference, pages 372–378. IEEE.
LeCun, Y., Cortes, C., and Burges, C. (2010). Mnist hand-
written digit database. ATT Labs [Online]. Available:
http://yann.lecun.com/exdb/mnist, 2.
Maass, W. (1997). Networks of spiking neurons: the third
generation of neural network models. Neural net-
works, 10(9):1659–1671.
Mel, B. W. (1999). Why have dendrites? a computational
perspective.
Mohammadi, M., Al-Fuqaha, A., Guizani, M., and Oh, J. S.
(2017). Semi-supervised Deep Reinforcement Learn-
ing in Support of IoT and Smart City Services. IEEE
Internet of Things Journal, pages 1–12.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
194
