
Towards a Better Understanding of Machine Learning based Network
Intrusion Detection Systems in Industrial Networks
Anne Borcherding
1,4 a
, Lukas Feldmann
3
, Markus Karch
1 b
, Ankush Meshram
2,4 c
and J
¨
urgen Beyerer
1,2,4
1
Fraunhofer Institute of Optronics, System Technologies and Image Exploitation IOSB,
Fraunhofer Center for Machine Learning, Karlsruhe, Germany
2
Vision and Fusion Laboratory (IES), Karlsruhe Institute of Technology (KIT), Karlsruhe, Germany
3
Siemens AG, Germany
4
KASTEL Security Research Labs, Karlsruhe, Germany
Keywords:
Network Intrusion Detection, Machine Learning, Critical Infrastructure, Industrial Control Systems,
Model Inspection.
Abstract:
It is crucial in an industrial network to understand how and why a intrusion detection system detects, classifies,
and reports intrusions. With the ongoing introduction of machine learning into the research area of intrusion
detection, this understanding gets even more important since the used systems often appear as a black-box
for the user and are no longer understandable in an intuitive and comprehensible way. We propose a novel
approach to understand the internal characteristics of a machine learning based network intrusion detection
system. This approach includes methods to understand which data sources the system uses, to evaluate whether
the system uses linear or non-linear classification approaches, and to find out which underlying machine
learning model is implemented in the system. Our evaluation on two publicly available industrial datasets
shows that the detection of the data source and the differentiation between linear and non-linear models is
possible with our approach. In addition, the identification of the underlying machine learning model can be
accomplished with statistical significance for non-linear models. The information made accessible by our
approach helps to develop a deeper understanding of the functioning of a network intrusion detection system,
and contributes towards developing transparent machine learning based intrusion detection approaches.
1 INTRODUCTION
Over the last decades, the realm of cybersecurity
has encountered more attacks with increasing so-
phistication than ever before. From Stuxnet to In-
dustroyer, the targets of these Advanced Persistent
Threats (APTs) vary from critical infrastructures to
industrial production systems. In order to get an
overview of cyber attacks in industrial control sys-
tems (ICS), the MITRE ATT&CK for ICS knowledge
base containing tactics, techniques, and procedures of
real threat groups can be used. To detect and address
a subset of these threats, network-based intrusion de-
tection systems (NIDSs) have become essential tools
a
https://orcid.org/0000-0002-8144-2382
b
https://orcid.org/0000-0002-5683-4499
c
https://orcid.org/0000-0001-6903-9446
in ICS. The objective of a NIDS is to analyze net-
work traffic in order to inform the operator via alerts
and logs whenever there are indications of misuse or
abuse in the network traffic. Over the last decades,
different approaches for NIDSs in industrial networks
have been proposed. One of them is the approach to
augment NIDSs with machine learning (ML) meth-
ods such as neural networks (NNs) or support vector
machines (SVMs) (Hu et al., 2018). Most of these
methods exhibit a high detection accuracy, and a low
false positive rate.
However, there are still some challenges espe-
cially with the complexity and transparency of pro-
posed ML-based NIDS since these approaches often
appear as black-box models for the user. Neverthe-
less, blue team analysts have to decide which action
to take based on the output of the NIDS. Therefore,
any credible NIDS solution must offer transparency
314
Borcherding, A., Feldmann, L., Karch, M., Meshram, A. and Beyerer, J.
Towards a Better Understanding of Machine Learning based Network Intrusion Detection Systems in Industrial Networks.
DOI: 10.5220/0010795900003120
In Proceedings of the 8th International Conference on Information Systems Security and Privacy (ICISSP 2022), pages 314-325
ISBN: 978-989-758-553-1; ISSN: 2184-4356
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All r ights reserved

to the analyst in the form of visibility into the de-
tection process to understand and trust the output of
the NIDS. Transparency and reduced complexity of
the NIDS also allows the analyst to optimize deci-
sions for the judgment of the model (Sommer and
Paxson, 2010). Furthermore, governments have be-
gun to include the requirement for understanding the
reason behind the decision made by a model into leg-
islation (Amarasinghe and Manic, 2018). In order to
face these challenges and still enable the use of com-
mon ML methods such as NNs or SVMs, we propose
and evaluate a novel approach to understand the in-
ner workings of ML-based NIDS. In this context, we
assume that future vendors of commercial ML-based
NIDS solutions will not share the architecture, and
the chosen ML methods deployed. In addition, the re-
sults of this work are intended to serve as a foundation
for generating adversarial examples to enhance the ro-
bustness of NIDS solutions. We intend to bring the
attention of network-based intrusion detection system
in industrial control systems (ICS NIDSs) researchers
and vendors to the challenges encountered for trans-
parent usage of ML-based detection methods.
We suggest a model-agnostic framework to ana-
lyze ICS NIDSs in a black-box setting to improve the
understanding of the inner workings of a ML-based
NIDS. Empirically, ICS NIDSs observe the network
traffic of the system under consideration over a longer
period to build their internal understanding of system
characteristics. These characteristics form the basis
for their underlying detection model. In the first step,
we use partial dependence plots (PDPs) to determine
which data sources are used by the model under inves-
tigation. Since a NIDS can extract a variety of differ-
ent features from network traces, an analyst may first
want to identify and understand which features have
an impact on the prediction result. In the second step,
we apply H-Statistics to determine the complexity of
the black-box NIDS. We differentiate between linear
and non-linear models providing the analyst with a
first indicator of how complex the underlying model
is. In the last step, we use surrogate models as a
means to identify the underlying model.
We have selected the Gas Pipeline (Morris et al.,
2015) and SWaT (Mathur and Tippenhauer, 2016)
dataset fom the limited number of publicly available
ICS datasets for evaluation purposes, based on four
criteria. For each of these datasets, six different ML
models are trained. We then consider these trained
models as black-box models to evaluate our approach.
The evaluation results show that it is possible to iden-
tify the data sources, and the complexity of the model
using PDP and H-Statistics. The identification of the
underlying model type using surrogates succeeded in
case of non-linear model types. These results are pre-
cursor to our ongoing effort of developing a frame-
work for generating adversarial examples for ICS
NIDSs to test their robustness. None of the proposed
model inspection techniques makes assumptions that
are exclusive to the domain of network intrusion de-
tection systems in industrial networks. We are con-
vinced that our approach can also be used in other
domains. To allow other researchers to reproduce our
results and to tailor the approach to their use case, we
published the source code of our implementation and
evaluation on GitHub
1
.
The rest of this paper is structured as follows. In
Section 2, we give background information on NIDS
and taxonomies for NIDS. Work related to this pa-
per is shown in Section 3. We present our approach
in Section 4 and evaluate it in Section 5. The results
of the evaluation are discussed in Section 6, and Sec-
tion 7 concludes our work.
2 REVIEW
NIST standard (Scarfone and Mell, 2007) defines
intrusion detection systems (IDSs) as software that
monitors and analyzes events occurring in a computer
system or network. For example, these events can be
log entries or file accesses, or on a network, it can be
traffic patterns which are a sign of possible incidents
violating security policies or standard security prac-
tices. There are many IDS technologies differentiated
by the types of monitored events and the methodolo-
gies used to identify incidents. The most commonly
used types of IDS are NIDS and host-based intru-
sion detection systems (HIDSs). NIDSs monitor net-
work traffic, and are often deployed between the con-
trol network and the corporate network in conjunction
with a firewall. In contrast to NIDSs, HIDSs mon-
itor various characteristics of the system on which
they are deployed, such as human machine inter-
face (HMI), supervisory control and data acquisition
(SCADA) servers, and engineering workstations. The
primary classes of intrusion detection methodologies
are categorized as: signature-based, compares known
threat signatures to monitored events using compari-
son operations; anomaly-based, uses statistics, expert
knowledge and ML methods to compare normal ac-
tivity against monitored events to detect significant
deviations; and stateful protocol analysis, predeter-
mined profiles based on protocol standards are com-
pared against monitored events to identify deviations
from each specified protocol state activity.
1
https://github.com/pirofex/ml-nids-industrial-paper
Towards a Better Understanding of Machine Learning based Network Intrusion Detection Systems in Industrial Networks
315

In addition to these primary classes, different tax-
onomies for NIDS have been developed. A taxon-
omy serves the purposes of: describing a complex
observed phenomena in smaller and more manage-
able units, predicting missing entities to fill up white
spots identified after classification process and guid-
ance for explaining the observed phenomena (Axels-
son, 2000). Mitchell and Chen defined ICS as a sub-
group of cyber-physical system (CPS) and introduced
a taxonomy for intrusion detection in CPS based on
two classification dimensions: detection techniques,
what misbehavior of physical component IDS ana-
lyzes, and audit material, how IDS collects data for
analysis (Mitchell and Chen, 2014). Based on detec-
tion techniques dimension, CPS IDS are categorized
as knowledge-based, behavior-based and behavior-
specification-based intrusion detection. Data can be
collected from CPS in two ways: host-based and
network-based auditing. Hu et al. argue that the
CPS IDS taxonomy does not take the particularity of
ICS into consideration. This particularity of ICS is
characterized by a close relationship with the physi-
cal world. They proposed a new ICS IDS taxonomy,
based on detection techniques and the characteristics
of ICS (Hu et al., 2018). The taxonomy includes
three categories: protocol analysis-based, checks vio-
lations of transmission packets in an industrial control
network against protocol specification; traffic mining-
based, analyzes nonlinear and complex relationships
between the network traffic and normal/abnormal sys-
tem behaviors; and control process analysis-based,
detects semantic attacks tampering with industrial
process data or operating rules of specific control sys-
tems. Hindy et al. presented a broad taxonomy ded-
icated to the IDS design considering different char-
acteristics such as computation location, evaluation
metrics, location on the network, and detection meth-
ods (Hindy et al., 2018).
This work analyzes NIDS from a black-box point
of view, hence a novel taxonomy is developed tak-
ing the black-box perspective into account and in-
tegrating relevant characteristics drawn from estab-
lished taxonomies by Hu et al. (Hu et al., 2018) and
Hindy et al. (Hindy et al., 2018). Our proposed tax-
onomy distinguishes ICS NIDS based on three crite-
ria: detection technique, data source and model gen-
eration process. The detection technique criterion de-
scribes how a NIDS processes collected information,
and can either be signature-based or anomaly-based.
Anomaly-based detection techniques are further di-
vided into statistics-based, knowledge-based and ML-
based. ML-based techniques are further grouped
based on their model complexity as non-linear, such
as Random Forest (RF), etc., and linear, such as Lo-
gistic Regression (LR) etc.. The data source crite-
rion differentiates ICS related characteristics of data,
which has a direct impact on the features used for de-
tection, and overall monitoring range of a NIDS, into
three categories: traffic mining data, includes high-
level network data like node addresses, ports, or pack-
ets sizes; protocol data, contains the protocol-specific
data which can be validated to be syntactically or se-
mantically correct; and control process data, values
of sensors and actuators in an ICS. The model gen-
eration process describes how the detection model of
NIDS reacts to changing environment in production,
either static, deployed once; or adaptive, incorporates
changes to ICS configuration.
This work will focus on NIDS that are based on
ML. Hence, the corresponding subset of the taxon-
omy is shown in Figure 1. The branches and leaves
that are considered in this work are highlighted in blue
bold lines. Our approach helps to identify at which
branch and/or leaf a given black-box ML-based NIDS
is located. Identification of linear or non-linear com-
binations of extracted features from each data source
specifies the type of ICS NIDS. For example, the ICS
NIDSs specialized in control process data will uti-
lize linear/non-linear features of process data, and dif-
fer from ICS NIDSs mining network traffic features.
Hence, a black-box ML-based NIDS can be catego-
rized to ICS NIDS type based on linear/non-linear us-
age of features extracted from different data sources.
3 RELATED WORK
Over the last couple of years, ML methods have
shown exceptional outcomes in a variety of fields,
such as natural language processing and computer vi-
sion. Hence, these approaches have also been widely
used in the field of ICS NIDS. A very well-known
publicly available dataset for evaluating ML-based
ICS NIDS is the Gas Pipeline dataset (Morris et al.,
2015). Based on this dataset alone, a variety of dif-
ferent ML approaches have been compared by re-
searchers. Khan uses WEKA (Markov and Russell,
2006) to develop and deploy IDS based on Na
¨
ıve
Bayes, PART and RF (Khan, 2019). In addition to
decision tree approaches, Sokolov et al. also con-
sidered various NN architectures, a SVM and a LR-
based classifier (Sokolov et al., 2019). The algo-
rithms applied by Anton et al. are SVM, RF, k-nearest
neighbor and k-means clustering (Anton et al., 2018).
Reviewing these approaches, it can be observed that
even with the same dataset, different ML approaches
are considered and recommended.
Despite the high prediction accuracy of ML-based
ICISSP 2022 - 8th International Conference on Information Systems Security and Privacy
316

ML-based ICS NIDS
Model Type
Linear
LR
...
Non-linear
RF
...
Model Generation
Static
Adaptive
Data Source
Traffic
Protocol
Process
Figure 1: Taxonomy for ML-based ICS NIDS from a black-box perspective. The differentiations which are part of this work
are highlighted with blue bold lines.
IDSs shown by literature, these models are more com-
plex, and the predictions of these models become
more difficult to understand. In order to address these
limitations, the research field of interpreting intrusion
detection models has transpired. Wang et al. pro-
pose an approach based on SHapley Additive exPlana-
tions (SHAP) connecting Local interpretable model-
agnostic explanations (LIME) and Shapely values to
improve the interpretation of IDS (Wang et al., 2020).
SHAP is a framework explaining the prediction of an
instance by computing the contribution of each fea-
ture. The models used to evaluate their approach were
trained on the NSL-KDD dataset (Tavallaee et al.,
2009). Marino et al. present an approach to gen-
erate explanations for incorrect classification made
by data-driven IDS (Marino et al., 2018). The pre-
sented methodology modifies a set of misclassified
samples until they are correctly classified. Amaras-
inghe and Manic suggest an approach tailored to Deep
Neural Networks (DNNs) which provides informa-
tion on the decision-making process of the DNN-IDS
for the user (Amarasinghe and Manic, 2018). The ap-
proach presented by Li et al. uses Local Explanation
Method using Nonlinear Approximation (LEMNA) to
explain the outcome of an anomaly-based IDS (Li
et al., 2019).
To the best of our knowledge, no approach focus-
ing on understanding the inner workings of ML-based
IDSs in industrial networks from a black-box perspec-
tive exists in literature. Moreover, there is only a
small amount of publications targeting the explana-
tions of the results made by ML-based NIDS in tra-
ditional IT systems (e.g. (Wang et al., 2020; Marino
et al., 2018; Amarasinghe and Manic, 2018)). Most of
these approaches make assumptions about the class of
ML models under investigation or try to describe the
inner workings using linear models. Since the com-
plexity of the models to be used in the future is not yet
apparent, we decided to use basic model inspection
techniques which have not been evaluated for ML-
based NIDS yet.
4 APPROACH
The aim of this work is to analyze ML-based NIDS,
especially with regard to their location in the taxon-
omy presented in Section 2. Similar to the taxonomy,
our approach is divided into three parts. First, we aim
to analyze the data source(s) the NIDS uses for clas-
sification. With this, we can determine which kind of
attacks are visible to the NIDS. This part of our ap-
proach is presented in Section 4.1. Second, we aim
to decide whether a given black-box NIDS is based
on a linear or non-linear model type. This informa-
tion gives insight into the complexity of the underly-
ing model type. We present this part of our approach
in Section 4.2. Third, we aim to understand which
model type is used by the NIDS in Section 4.3. This
information can build the base for further model spe-
cific investigations and analyses.
In our work, we assume that the given NIDS can
be treated as a black-box oracle. This means that there
exists no knowledge about internals of the NIDS,
especially neither the used prediction method, nor
the features which are used for the classification are
known. Still, it is possible to send as many requests
to the models as required and access the prediction
results.
4.1 Data Source
Our main idea for the detection of the data source is
to use model inspection techniques to analyze the fea-
tures used by the NIDS. In contrast to common fea-
ture importance techniques, which try to assign a cer-
tain score to a feature, we try to detect if a feature is
recognized by a model at all. To achieve this goal,
we use PDPs (Friedman, 2000) which help to under-
stand the prediction function of a black-box model by
visualizing the dependence of a prediction result on a
set of features (Linardatos et al., 2021). To calculate
the PDP for a given feature v
i
, a value grid with the
observed values of the target feature is generated. For
each grid value g
i j
, one input for the NIDS is gener-
ated in which v
i
is set to g
i j
and all remaining features
Towards a Better Understanding of Machine Learning based Network Intrusion Detection Systems in Industrial Networks
317
−5
−2 1 2 4
6
10
0.2
0.4
0.6
0.8
1
Feature v
i
Prediction result
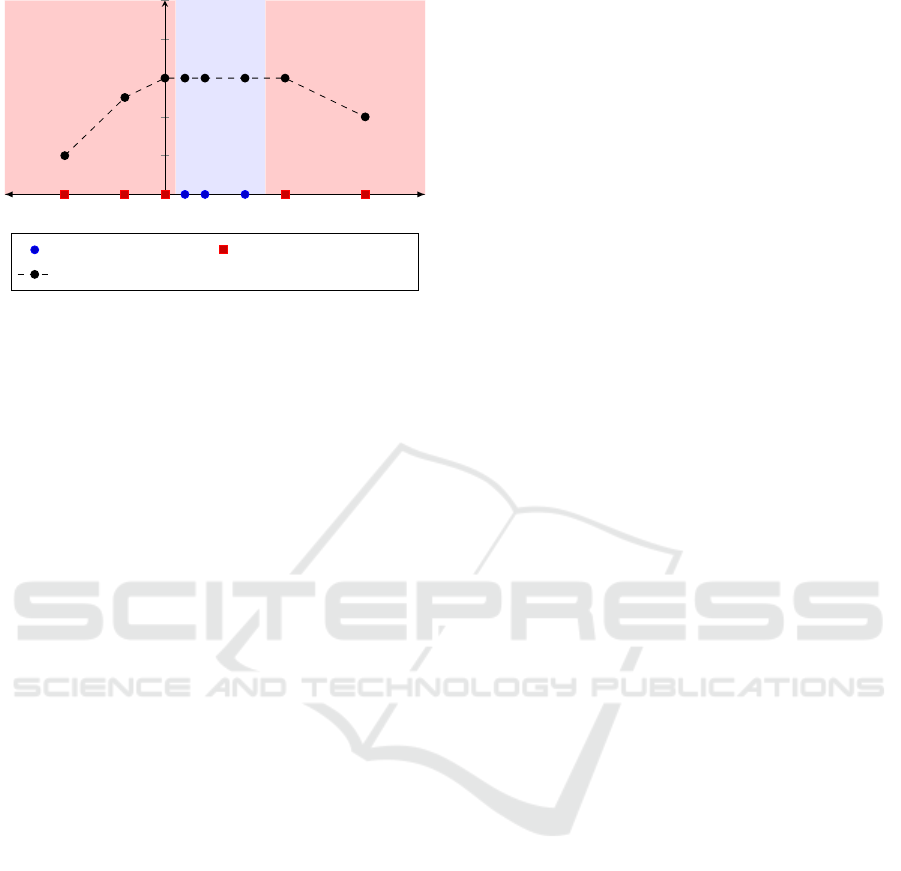
Original grid values Additional grid values
Prediction result
Figure 2: Example of a feature grid using Fibonacci sam-
pling. The feature v
i
has three different values from which a
Fibonacci sequence in both positive and negative directions
is sampled. With this, the impact of v
i
on the prediction
becomes measurable.
are set to their average. Now, the NIDS is requested
to label each of these inputs. With this, we can see
how the different values of v
i
influence the prediction
result. A detailed description of PDPs is given by the
original author (Friedman, 2000).
We calculate the one-way PDP for each input fea-
ture. As a result, we receive a representation of how
much the prediction result of the model changes for
different grid values of the respective feature. This is
represented as a function f , which maps a given grid
value of the feature to a prediction result of the model.
A minimal example of such a function is shown in
Figure 2. The mean absolute gradient of f shows
whether the feature has an impact on the prediction
result. If the gradient is exactly zero, we conclude
that the feature is not used by the model. If the result
is not equal to zero, the feature is definitively used by
the model. However, as it is presented in Figure 2,
with a zero gradient it is not always clear that the
feature is not recognized by the model. For exam-
ple, if the weights for a feature in a model are very
low, there might be no change in the prediction re-
sult with the values observed in the used samples. If
we would only take the observed values into account
(represented as blue circles in Figure 2), we would see
no change in the prediction result. In order to address
this issue, we propose a new method to generate the
value grid. As before, the observed values of the tar-
get features are saved in the grid (represented as blue
circles in Figure 2). In addition, the value range is ex-
tended to both sides by inserting new values that were
not present in the original data samples (represented
as red squares in Figure 2). The new values are sam-
pled using a Fibonacci sequence. With this, the re-
sulting grid contains reasonable big numbers already
after few steps. Using the additional values compen-
sates small feature weights in the model.
Finally, if the gradient of a PDP remains zero af-
ter extending the value grid, some additional verifi-
cation is needed. Theoretically it might be the case
that some data points have a positive, and some have
a negative association with the prediction result, so
that they annihilate each other in a PDP. To tackle this
issue, one can use individual conditional expectation
(ICE) plots which have been presented by Goldstein
et al. (Goldstein et al., 2015). While PDPs use the av-
eraged observed changes of the prediction result, ICE
plots can be applied on each individual data point and
show how the prediction changes when the target fea-
ture changes. If the gradient of all ICE plots is zero
as well, it shows that the feature does not have any
impact on the prediction result.
4.2 Linearity
In order to make a next step towards the understand-
ing of the model type, we aim to decide whether a
given black-box NIDS is based on a linear or non-
linear model type. Intuitively, linear models are less
likely to learn dependencies between features than
non-linear models. This is why we calculate feature
interaction strengths in order to measure the degree
of non-linearity of a model. For this, H-Statistics have
been used in literature (Friedman and Popescu, 2008).
To analyze the models, we calculate H-Statistics of
all possible feature pairs in the input representation of
the models by performing the following steps for each
model M. Note that access to the original dataset is
assumed. Afterward, the resulting H-Statistics can be
compared between the different linear and non-linear
model types.
1. Sample a new dataset D of size N from the origi-
nal dataset.
2. Create a list of all two-way combinations of the
input feature representation of model M.
3. Calculate the H-Statistics for M using the samples
in D for each of these combinations.
One drawback of this approach is that the calcula-
tion of H-Statistics is computationally expensive. For
each H-Statistics computation, 2n
2
predictions have
to be made where n is the amount of features. De-
pending on the feature size of the dataset and the pre-
diction speed of the model type, our calculations took
a maximum of up to 16 hours, but usually less than
two hours using an Intel i7-10850H CPU with six
cores. In order to reduce the costs, it is beneficial to
set the size of D as small as possible. Since marginal
distributions are estimated, there exists a certain vari-
ance. The results for the same model can differ be-
ICISSP 2022 - 8th International Conference on Information Systems Security and Privacy
318

tween two runs of creating D and calculating the H-
Statistics. To ensure that our results are not biased by
the selection of the sub-dataset, we select a sample
size at which the results are stable. For this, we eval-
uate different sample sizes and compare the standard
deviation between the different calculation rounds.
4.3 Model Type
The next step of our analysis of NIDS aims to deter-
mine the exact type of a black-box model. For this, we
train surrogate models which approximate the behav-
ior of the black-box model as proposed by Papernot
et al. (Papernot et al., 2017). Then, we use the Eu-
clidean distance of the H-Statistics as a distance met-
ric between the black-box model and the surrogates.
In detail, we calculate the Euclidean distance between
two ordered lists l and m element by element, where l
and m represent the H-Statistics of two models. This
gives us an estimation of how well the feature inter-
actions of the black-box model are approximated by
each of the surrogate models. The lower the mea-
sured distance is, the more similar the feature interac-
tion strengths are. This is why the original black-box
model is then assumed to have the same model type
as the surrogates it has the smallest distance to.
For the training of the surrogates, we propose
two different approaches. With this, we acknowledge
that there are situations where the original dataset is
known and situations in which it is not known.
Known Dataset. In our first approach, we propose
to use the same dataset for the training of the surro-
gates that has been used for the training of the black-
box model. This assumes that the original dataset is
accessible. For practical inspection and evaluation of
NIDS this is not a huge drawback since the dataset is
known and accessible in most cases.
Unknown Dataset. In the second approach, we
propose to use the original model to create a new
dataset. This includes generating a new dataset E us-
ing general information about the input data of the
black-box model. General information can be the
type of network packets which are processed by the
model, e.g. Modbus or TCP/IP. By generating new
data packets of this type and sending them over the
network, no knowledge about the preprocessing or in-
put representation of the black-box model is needed.
Only the oracle functionality of the model is used.
Then, labels for the new dataset are created by query-
ing the original model, and the surrogates are trained
on E. For details on the packet generation for the un-
known dataset, please refer to our source code.
5 EVALUATION
In order to evaluate the three parts of our approach, we
trained different ML models on ICS network datasets
which represent different ML-based NIDS. Based on
these models, we analyze the performance of our ap-
proach. For this evaluation, we refer to the trained
NIDS as models, and the underlying ML model as
model type. To maximize the benefit of the evalua-
tion, we published the source code of our evaluation.
5.1 Experimental Setup
Before we dive into the results of the evaluation, this
section clarifies our experimental setup. This includes
the formulation of our hypotheses, the presentation
of our strategy, and the motivation of our choice of
model types and datasets. Following this section, we
present and discuss the results of our evaluation.
5.1.1 Hypotheses
Our experiments are driven by three hypotheses
which concern the three approaches we took in order
to understand ML-based NIDS better.
H.1 The data sources a NIDS uses can be identified
using PDP and ICE plots.
H.2 H-Statistics can be used to distinguish linear
from non-linear NIDS relatively.
H.3 The model type of a NIDS can be identified
using surrogate models.
5.1.2 Strategy
To evaluate our hypotheses, we created ML models
with six model types. For each of the model types,
two models are created which are trained on one of the
two datasets respectively. These models are then used
to evaluate our approach. During our experiments,
our methods treat the models as black-box models but
are allowed to use them as oracles for an unlimited
amount of requests. That means that the models can
be asked to label a given data point for arbitrary data
points, and an arbitrary amount of times.
Similar to our hypotheses, our evaluation is di-
vided into three parts. First, we evaluate whether the
data sources used by our models can be identified us-
ing PDPs and ICE plots (Section 5.2). Second, we
evaluate the differentiation between linear and non-
linear model types (Section 5.3). Third, we evaluate
the identification of the underlying model type (Sec-
tion 5.4)
Towards a Better Understanding of Machine Learning based Network Intrusion Detection Systems in Industrial Networks
319

5.1.3 Model Types
Based on our literature review (see Section 3), we
choose three linear and three non-linear model types
for the evaluation.
Linear models: Logistic Regression (LR),
Linear Neural Network (NN lin.), Linear Sup-
port Vector Machine (SVM lin.)
Non-linear models: Neural Network (NN),
Random Forest (RF), Support Vector Machine
(SVM).
The model type NN lin. only uses linear activation
functions in the hidden layers, and SVM lin. does not
include a kernel function. The non-linear models are
especially interesting for the differentiation of the un-
derlying model type. For each model type, one model
is trained on each of the both datasets presented in
section 5.1.4.
Note that our goal is to evaluate our proposed
techniques but not to evaluate how efficient the dif-
ferent models work on the datasets. Evaluations of
the performance of different model types on ICS net-
work datasets have been conducted by different au-
thors (see Section 3). That is why we do not include
specific optimizations of the models but focus on the
evaluation of our approaches. For details on the train-
ing phase and the configurations of our models and
the surrogate models please refer to our source code.
5.1.4 Dataset
As a basis for our evaluation, we analyze different
ICS network datasets. From these datasets, we se-
lect two datasets for our evaluation. Our selection is
based on four requirements. (I) The dataset has been
evaluated in literature, and has been improved based
on these evaluations. (II) The dataset is based on a
realistic scenario in order to increase the validity of
our methods for real-world tasks. (III) A wide range
of different attacks is included in the dataset such that
models can be trained on different attack scenarios.
(IV) The dataset includes different data sources such
as traffic data, protocol data, and process data such
that an evaluation regarding the identification of data
sources used by a NIDS is feasible. The results of our
analysis of datasets based on the requirements defined
above are shown in Table 1.
Based on our requirements, we choose the Gas
Pipeline dataset (Morris et al., 2015) and the SWaT
dataset (Mathur and Tippenhauer, 2016).
The Gas Pipeline dataset is based on a laboratory-
scaled gas pipeline. It consists of Modbus com-
mand/response pairs with 17 features, including traf-
fic data, protocol data, and process data. Four differ-
Table 1: Evaluation of different ICS NIDS datasets regard-
ing their evaluation and enhancement by literature (Enh.),
whether they are based on a realistic scenario (Scen.), their
coverage of different attack types (Attacks), and their cov-
erage of different data sources (Data).
Dataset
Enh.
Scen.
Attacks
Data
NSL-KDD X - - -
Water Storage - X X X
SWaT X X - X
Gas Pipeline X X X X
ent attack types have been executed randomly: recon-
naissance, response injection, command injection and
denial of service. The dataset includes fine-grained la-
bels for these attacks. An original version of the Gas
Pipeline dataset (Morris and Gao, 2014) has been im-
proved, and a second version of this dataset has been
published by the same authors (Morris et al., 2015)
which we use for our evaluations. In literature, both
versions of the dataset have been used for various
evaluations (eg. (Zolanvari et al., 2019; Perez et al.,
2018; Lai et al., 2019; Shirazi et al., 2016)).
The SWaT dataset is based on a scaled down ver-
sion of a real-world industrial water treatment plant
allowing data collection under two behavioral modes:
normal and attacked (Mathur and Tippenhauer, 2016).
The system consists of six stages with different fea-
tures. From the collected data, the authors created
different versions of datasets. We choose the reduced
A4&A5 dataset including three hours of SWaT under
normal operating conditions and one hour in which
six attacks were carried out. From a technical point
of view, all of these attacks are to be classified as
Man-in-the-Middle attacks, and the dataset such only
covers one attack type. In total, the dataset includes
77 features representing sensor and actuator values
from a data historian. It is important to emphasize
that NIDS solutions usually do not consider histo-
rian data as data source. Nevertheless, we decided
to select the A4&A5 SWaT dataset because we iden-
tified a high number of publications detecting anoma-
lies and cyber attacks in industrial networks based on
process data (e.g. (Inoue et al., 2017; Kravchik and
Shabtai, 2018; Lavrova et al., 2019)). The versions of
the SWaT dataset which include the original network
trace have received less attention in literature.
5.2 Data Source
In order to answer whether the used data sources can
be identified by PDP and ICE plots, we train our
models on different subsets of the datasets. For this,
we split the features of both datasets into traffic data
ICISSP 2022 - 8th International Conference on Information Systems Security and Privacy
320
LR NN
NN lin.
RF
SVM SVM lin.
function
length
crc rate
pump
1.12
0.11
2.09
0
9.73
0.31
4.52
0
1.08
0.1
1.53
0
8.16 · 10
−2
1.98 · 10
−3
8.24 · 10
−12
0
0.49
0.45
3.01 · 10
−2
0
8.91 · 10
−2
1.11 · 10
−16
2.27 · 10
−13
0
Model
Feature
Maximum absolute gradient of PDP
0.00
2.00
4.00
6.00
8.00
Gradient
Figure 3: Maximum absolute gradient of PDP for the models trained on the protocol data. The gradient has non-zero values
for used protocol data features (function, length, crc rate) and is zero for the control process feature pump not used during
training.
(high-level network features), protocol data (protocol
specific features), and process data (control process
specific features). This division is based on the prac-
tical question whether a NIDS performs deep packet
inspection and such takes process data into account.
Then, we train our models on these three subsets as
well as on the whole dataset. Afterward, we calculate
the PDP for each model as described in Section 4.1.
An extract of our results is shown in Figure 3.
The models shown on the x-axis have been trained on
the protocol data of the Gas Pipeline dataset (i.e. the
features command response, crc rate, function, and
length). For each model and each feature, we calcu-
lated the maximum gradient of the PDP. In Figure 3,
the color of each cell as well as the number displayed
in the cell corresponds to this maximum gradient. On
the y-axis three features of the protocol data as well as
an unused control process data feature (pump) is pre-
sented. It is clearly visible that the maximum gradient
helps to distinguish whether the feature has been used
by the model or not. The maximum gradient is equal
to zero for the non-used feature and is non-zero for
the used features. In the example of the figure, we can
clearly see that the models do not take the control pro-
cess data feature into account. Our experiments show
that this also holds for the other data sources (traffic
and control process data). Due to space restrictions,
the figures of these experiments are not shown, but the
results can be reproduced by using the source code of
our experiments.
Our experiments support hypothesis H.1 since
they show that the gradient of the calculated plots is a
reliable indicator whether a feature has been used by
the model. From this information, it can be derived
whether the model uses traffic data, protocol data, or
process data.
For our experimental setup, PDPs were sufficient
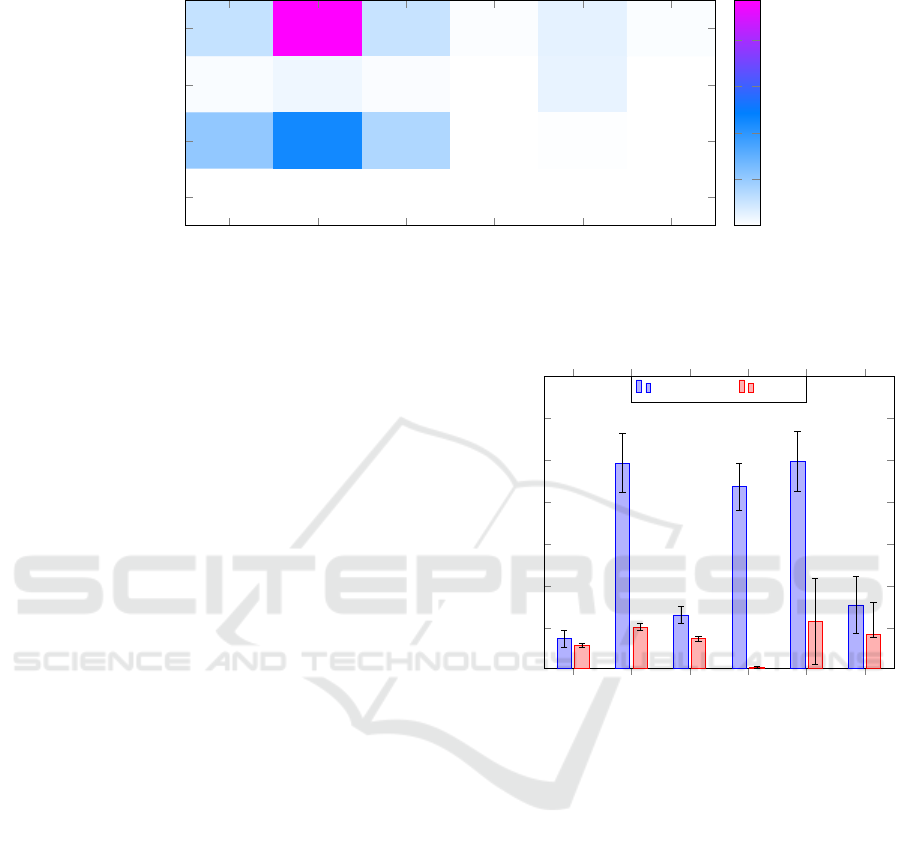
LR
NN
NN lin.
RF
SVM
SVM lin.
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.0373
0.2463
0.0656
0.2186
0.2485
0.0774
0.0295
0.0509
0.0373
3.2779 ·10
−3
0.058
0.0425
Model
Mean H-Statistics
Gas Pipeline SWAT
Figure 4: Mean H-Statistics of the models, grouped by
model types (incl. 95%-quantile). Linear model types
(highlighted in bold) clearly stand out relatively but not ab-
solutely.
to identify the used data source. Still, there are cases
in which an ICE plot would be needed. As discussed
in Section 4.1, if some of the data points have a pos-
itive and some have a negative association with the
prediction results, they might annihilate each other in
a PDP. In this case, an ICE plot could help to identify
the used features and such the used data source.
5.3 Linearity
After we showed how to identify the data source used
by a NIDS, we now aim to identify which underly-
ing model the NIDS uses. As a first step, we evalu-
ate our approaches to distinguish between linear and
non-linear models. We propose to use the H-Statistics
Towards a Better Understanding of Machine Learning based Network Intrusion Detection Systems in Industrial Networks
321

to distinguish between linear and non-linear models
(see Section 4.2). In order to test the corresponding
hypothesis H.2, we conduct experiments using lin-
ear and non-linear models on both datasets (see Sec-
tion 5.1.3 for details on the models).
First, we calculate the H-Statistics for each model
and each feature pair, then use the mean of the H-
Statistics for the differentiation between linear and
non-linear model types. Figure 4 shows the calcu-
lated mean H-Statistics for all models; linear models
are printed in bold.
For the Gas Pipeline dataset, all non-linear mod-
els have relatively higher values than the linear mod-
els (see Figure 4). However, for the SWaT dataset,
this does not hold for RF. Our analysis shows that the
RF only takes few of the features into account for the
classification. Even though it is in theory a highly
non-linear model, it behaves somewhat like a linear
model in this scenario. This is why our approach clas-
sifies it as a linear model, which is in fact a correct
classification for this concrete instance of a RF.
Based on our evaluation and on our analysis of the
models, we come to the conclusion that our experi-
ments support H.2.
5.4 Surrogates
With our previous results, we are able to identify
which data source has been used, and to decide
whether a model is linear. Our next step is to identify
the underlying ML model type. For this, we are using
the approach to create surrogates and to calculate the
distance between these models using the H-Statistics
of the models presented in Section 4.3.
Known Dataset. In our first experiment, we assume
that we do have access to the dataset that has been
used to train the original black-box model. We train
five surrogate models for each model type and cal-
culate the distances between each original model and
each surrogate model by using the H-Statistics. Each
row of Table 2 shows the mean of these distances be-
tween each model and the surrogates. The numbers
printed in bold are the minimum distance of each row,
i.e. the most likely model type for the corresponding
original model. If this minimum value lies on the di-
agonal of the matrix and such the most likely model
type is indeed the correct model type, it is highlighted
in green. If the correct identification of the model type
was not possible, the minimum distance is highlighted
in red. Gray cells show the actual model type.
This first analysis based on the means shows that
non-linear model types can be identified correctly.
However, the linear model types cannot be identified
based on these distances.
In addition, we perform a statistical analysis in or-
der to evaluate whether our results are significant. For
this, we use a Mann-Whitney U Test with the alter-
native hypothesis that the distances to the surrogates
with the same model types are less than the distances
to the surrogates based on a different model type.
The resulting p-values are presented in Table 3.
It has the same structure as Table 2 but shows the
p-value for each comparison. Values that are higher
than the significance level of 0.05 are highlighted. If
the table shows a value lower than 0.05, the model
type of the two corresponding models can be distin-
guished significantly.
These results (presented in Table 3) show that
the model types can be distinguished from the other
model types with p-value < 0.05 for each model ex-
cept for the LR and the linear SVM. It is interest-
ing to see that the linear NN can be distinguished sig-
nificantly. We perform other tests to verify this, and
the results show a statistically significant difference in
each case.
The results in Table 2 also confirm that the approx-
imation of a non-linear model is easier for non-linear
models than it is for linear models. For the non-linear
models, the distances to the non-linear surrogates are
smaller than the distances to the linear surrogates with
one exception. The approximation of the linear NN
regarding the RF is apparently better than the approx-
imation given by the NN. In addition, the linear NN
is also able to approximate LR and SVM lin. with the
lowest distance.
An additional observation is that Table 2 is not
symmetrical. This leads to the insight that the abil-
ity to approximate the model type is not symmetrical
for the linear models. For example, the distance from
a surrogate NN to the original SVMs is 3.25 whereas
the distance from a surrogate SVM to the original lin-
ear NNs is 2.92. The reason for this is the differ-
ent approximation capabilities of the different mod-
els. This difference is especially high for the linear
models which is shown by SVM lin. for example.
Our results show the SVM lin. is not suited to build
a good surrogate for the other linear models. In con-
trast, the other linear models are able to approximate
the linear SVM better. This results in the inability
to differentiate between the linear models. However,
for the non-linear models the missing symmetry is not
significant enough to trouble the differentiation.
This experiment shows that, given the dataset, the
underlying model can be identified correctly for non-
linear model types in a statistically significant way.
With this, it supports H.3 with the restriction to non-
linear model types.
ICISSP 2022 - 8th International Conference on Information Systems Security and Privacy
322

Table 2: Mean distance between the original models (rows) and the five trained surrogates (columns). Non-linear model types
can be identified.
LR NN NN lin. RF SVM SVM lin.
LR 0.74 3.82 0.44 2.91 3.90 3.78
NN 4.00 1.88 3.89 2.81 2.92 4.61
NN lin. 0.82 3.67 0.72 2.70 3.79 3.61
RF 2.73 2.82 2.69 0.84 2.96 3.94
SVM 4.02 3.25 4.05 3.29 2.35 4.80
SVM lin. 2.90 4.28 2.77 3.72 4.58 3.60
Table 3: Resulting p-values of a Mann-Whitney U test regarding the statistical significance of the distance of the H-Statistics.
Non-linear model types can be distinguished significantly (p-value < 0.05).
LR NN NN lin. RF SVM SVM lin.
LR - 0.006 0.989 0.006 0.006 0.006
NN 0.006 - 0.006 0.006 0.011 0.006
NN lin. 0.047 0.006 - 0.006 0.006 0.006
RF 0.006 0.006 0.006 - 0.006 0.006
SVM 0.006 0.006 0.006 0.006 - 0.006
SVM lin. 0.993 0.148 0.997 0.338 0.018 -
Unknown Dataset. In the second experiment, we
no longer assume access to the underlying dataset but
only the knowledge regarding the kind of data used
for the model (i.e. full network traffic). With this in-
formation, we create a new labeled dataset by probing
the black-box model (see Section 4.3). Our experi-
ments show that the model type cannot be identified
in this setting. Nevertheless, this is an interesting re-
search insight.
5.5 Summary
Our experiments are driven by the three hypothe-
ses regarding the differentiation of data sources, the
differentiation between linear and non-linear models,
and the identification of the underlying model type of
an NIDS (see Section 5.1.1). We showed with our
experiments that the data source used by our models
could be differentiated using PDPs, thus supporting
H.1. We also showed that the linearity of a model can
be assessed relatively by calculating the H-Statistics.
Thus, our experiments are supporting the hypothesis
H.2. In addition, we showed that non-linear model
types can be identified reliably using surrogates that
have been trained on the same dataset. This result
supports the hypothesis H.3 with the restriction to
non-linear model types and surrogate models trained
on the same dataset.
6 DISCUSSION AND FUTURE
WORK
Our experiments provide new insights towards a bet-
ter understanding of ML-based NIDS. The following
section discusses the results and goes into detail re-
garding possible limitations and future work.
Regarding the data source detection, our experi-
ments show that the maximum gradient of the PDP is
a good indicator to see whether a specific data source
has been used by the models. An assumption of PDPs
is that the used features are not correlated. Even
though the features of the used datasets are not com-
pletely uncorrelated (e.g. pump and pressure mea-
surement), PDPs can be used to distinguish the data
source used by the model as we compare the results
relative to each other. Nevertheless, for other datasets,
this assumption might influence the reliability of the
results.
For the differentiation between linear and non-
linear model types, we show that the differentiation
can be done relatively but not absolutely. It implies
that a decision whether a given model is linear or not
requires other known or unknown models trained on
the same, or a similar dataset. Only with those other
models, the threshold between linear and a non-linear
models can be identified.
Our experiments regarding the differentiation of
the model type show that non-linear model types can
be identified if the surrogates are trained on the same
Towards a Better Understanding of Machine Learning based Network Intrusion Detection Systems in Industrial Networks
323

dataset. For the linear model types, the differentia-
tion is not possible. In our opinion, the reason for this
lies inherently in the linearity of the models. A lin-
ear classification might be easier to be approximated
by the other models which is why the H-Statistics are
more similar.
In addition, we showed that the differentiation
based on surrogate models trained on a re-labeled
dataset is not possible. For the practical inspection
and evaluation of NIDS this is an acceptable draw-
back since the dataset is known and accessible in most
cases since the training of the NIDS usually takes
place on-site and such the analysts have insight into
the used dataset.
During our evaluation, we identified possibilities
to extend the presented research work regarding the
coverage of the taxonomy, the performance, used
methods, and the domain. (I) Within our taxonomy
for ML-based ICS NIDS (Figure 1), the branch differ-
entiating the model generation process needs further
investigation. It would be insightful to observe how
an approach differentiates between static and adap-
tive models reliably. (II) One computationally expen-
sive part of our approach is the calculation of the H-
Statistics for all feature pair combinations. Reducing
the total amount of calculations would be a great im-
provement. This could be accomplished by weighted
feature combinations where insignificant combina-
tions are omitted. (III) As has been stated, we per-
formed no parameter tuning on the ML models we
used in our evaluation. It would be interesting to eval-
uate whether the parameter tuning and other optimiza-
tion strategies used for ICS NIDS would have an im-
pact on the results. Additionally, it would be interest-
ing to analyze which features are relevant for which
model and why. For this, our approach regarding the
data source can build a basis. (IV) In addition, instead
of H-Statistics, other methods could be used to ana-
lyze black-box models such as SHAP (Wang et al.,
2020). (V) Our approach is theoretically neither re-
stricted to NIDS nor to the domain of ICS. It would
be interesting to verify whether our approach is ap-
plicable to other domains such as HIDS, and IT net-
works. Amongst others, that could include extending
our evaluation using other datasets and model types.
7 CONCLUSIONS
We presented and evaluated approaches for a bet-
ter understanding of ML-based ICS NIDS. Our re-
sults can be set together to form a work flow to an-
alyze a given black-box NIDS and test its robustness
through adversarial examples. First, one can review
the data sources used by the NIDS in order to under-
stand which kind of communication and thus which
kind of attacks are seen by the NIDS. This informa-
tion helps to understand which types of attacks are
visible to the NIDS, and which types of attacks are
not visible with no chance to be detected. Then, sur-
rogate models can be trained on the same dataset the
original model has been built on. With these surro-
gates, one can test if the black-box NIDS is a linear
or a non-linear model. This helps to understand how
complex the decision boundary of the NIDS is. With
this information, one can gain insight on how diffi-
cult it would be to craft adversarial examples for the
NIDS. In practice, most NIDS should use non-linear
approaches. If the black-box NIDS is indeed a non-
linear model, one can identify the model type by using
the surrogate models again. This information can then
be used to perform investigations and evaluations that
are specific for the identified model type. All those
tests and investigations lead to valuable insight into
the black-box NIDS.
We conducted our experiments in the domain of
ICS NIDS and used ICS network datasets for the eval-
uation. However, our approach is broad and funda-
mental enough to be valuable in other domains. We
want to encourage researchers in the same and in
other domains to evaluate our approach and tailor it
to their use case by using our published source code
as a basis.
ACKNOWLEDGEMENTS
This work was supported by funding from the topic
Engineering Secure Systems of the Helmholtz As-
sociation (HGF) and by KASTEL Security Research
Labs.
REFERENCES
Amarasinghe, K. and Manic, M. (2018). Improving user
trust on deep neural networks based intrusion detec-
tion systems. In IECON 2018-44th Annual Confer-
ence of the IEEE Industrial Electronics Society, pages
3262–3268. IEEE.
Anton, S. D., Kanoor, S., Fraunholz, D., and Schotten,
H. D. (2018). Evaluation of machine learning-based
anomaly detection algorithms on an industrial mod-
bus/tcp data set. In Proceedings of the 13th Interna-
tional Conference on Availability, Reliability and Se-
curity, ARES 2018, New York, NY, USA. Association
for Computing Machinery.
Axelsson, S. (2000). Intrusion detection systems: A sur-
vey and taxonomy. Technical report, Department of
ICISSP 2022 - 8th International Conference on Information Systems Security and Privacy
324

Computer Engineering, Chalmers University of Tech-
nology, G
¨
oteborg, Sweden.
Friedman, J. (2000). Greedy function approximation: A
gradient boosting machine. The Annals of Statistics,
29.
Friedman, J. and Popescu, B. (2008). Predictive learning
via rule ensembles. The Annals of Applied Statistics,
2.
Goldstein, A., Kapelner, A., Bleich, J., and Pitkin, E.
(2015). Peeking inside the black box: Visualizing
statistical learning with plots of individual conditional
expectation. journal of Computational and Graphical
Statistics, 24(1):44–65.
Hindy, H., Brosset, D., Bayne, E., Seeam, A., Tachtatzis,
C., Atkinson, R., and Bellekens, X. (2018). A taxon-
omy and survey of intrusion detection system design
techniques, network threats and datasets. Technical
report, University of Strathclyde, Glasgow.
Hu, Y., Yang, A., Li, H., Sun, Y., and Sun, L. (2018). A
survey of intrusion detection on industrial control sys-
tems. International Journal of Distributed Sensor Net-
works, 14(8):1550147718794615.
Inoue, J., Yamagata, Y., Chen, Y., Poskitt, C. M., and Sun,
J. (2017). Anomaly detection for a water treatment
system using unsupervised machine learning. In 2017
IEEE international conference on data mining work-
shops (ICDMW), pages 1058–1065. IEEE.
Khan, A. A. Z. (2019). Misuse intrusion detection using
machine learning for gas pipeline scada networks. In
Proceedings of the International Conference on Secu-
rity and Management (SAM), pages 84–90.
Kravchik, M. and Shabtai, A. (2018). Detecting cyber at-
tacks in industrial control systems using convolutional
neural networks. In Proceedings of the 2018 Work-
shop on Cyber-Physical Systems Security and Pri-
vaCy, pages 72–83.
Lai, Y., Zhang, J., and Liu, Z. (2019). Industrial anomaly
detection and attack classification method based on
convolutional neural network. Security and Commu-
nication Networks, 2019.
Lavrova, D., Zegzhda, D., and Yarmak, A. (2019). Using
gru neural network for cyber-attack detection in auto-
mated process control systems. In 2019 IEEE Interna-
tional Black Sea Conference on Communications and
Networking (BlackSeaCom), pages 1–3. IEEE.
Li, H., Wei, F., and Hu, H. (2019). Enabling dynamic net-
work access control with anomaly-based ids and sdn.
In Proceedings of the ACM International Workshop
on Security in Software Defined Networks & Network
Function Virtualization, pages 13–16.
Linardatos, P., Papastefanopoulos, V., and Kotsiantis, S.
(2021). Explainable ai: A review of machine learn-
ing interpretability methods. Entropy, 23(1):18.
Marino, D. L., Wickramasinghe, C. S., and Manic, M.
(2018). An adversarial approach for explainable ai in
intrusion detection systems. In 44th Annual Confer-
ence of the IEEE Industrial Electronics Society, pages
3237–3243. IEEE.
Markov, Z. and Russell, I. (2006). An introduction to the
weka data mining system. ACM SIGCSE Bulletin,
38(3):367–368.
Mathur, A. P. and Tippenhauer, N. O. (2016). Swat: a wa-
ter treatment testbed for research and training on ics
security. In 2016 International Workshop on Cyber-
physical Systems for Smart Water Networks, pages
31–36. IEEE.
Mitchell, R. and Chen, I.-R. (2014). A survey of intrusion
detection techniques for cyber-physical systems. ACM
Computing Surveys (CSUR), 46(4):1–29.
Morris, T. and Gao, W. (2014). Industrial control system
traffic data sets for intrusion detection research. In In-
ternational Conference on Critical Infrastructure Pro-
tection, pages 65–78. Springer.
Morris, T. H., Thornton, Z., and Turnipseed, I. (2015). In-
dustrial control system simulation and data logging
for intrusion detection system research. 7th annual
southeastern cyber security summit, pages 3–4.
Papernot, N., McDaniel, P., Goodfellow, I., Jha, S., Celik,
Z. B., and Swami, A. (2017). Practical black-box at-
tacks against machine learning.
Perez, R. L., Adamsky, F., Soua, R., and Engel, T. (2018).
Machine learning for reliable network attack detection
in scada systems. In 2018 17th IEEE International
Conference On Trust, Security And Privacy In Com-
puting And Communications/12th IEEE International
Conference On Big Data Science And Engineering
(TrustCom/BigDataSE), pages 633–638. IEEE.
Scarfone, K. and Mell, P. (2007). Guide to intrusion de-
tection and prevention systems (idps). NIST special
publication, 800(2007):94.
Shirazi, S. N., Gouglidis, A., Syeda, K. N., Simpson, S.,
Mauthe, A., Stephanakis, I. M., and Hutchison, D.
(2016). Evaluation of anomaly detection techniques
for scada communication resilience. In 2016 Re-
silience Week (RWS), pages 140–145. IEEE.
Sokolov, A. N., Pyatnitsky, I. A., and Alabugin, S. K.
(2019). Applying methods of machine learning in the
task of intrusion detection based on the analysis of in-
dustrial process state and ics networking. FME Trans-
actions, 47(4):782–789.
Sommer, R. and Paxson, V. (2010). Outside the closed
world: On using machine learning for network intru-
sion detection. In 2010 IEEE Symposium on Security
and Privacy, pages 305–316.
Tavallaee, M., Bagheri, E., Lu, W., and Ghorbani, A. A.
(2009). A detailed analysis of the kdd cup 99 data
set. In 2009 IEEE symposium on computational intel-
ligence for security and defense applications, pages
1–6. IEEE.
Wang, M., Zheng, K., Yang, Y., and Wang, X. (2020). An
explainable machine learning framework for intrusion
detection systems. IEEE Access, 8:73127–73141.
Zolanvari, M., Teixeira, M. A., Gupta, L., Khan, K. M.,
and Jain, R. (2019). Machine learning-based network
vulnerability analysis of industrial internet of things.
IEEE Internet of Things Journal, 6(4):6822–6834.
Towards a Better Understanding of Machine Learning based Network Intrusion Detection Systems in Industrial Networks
325
