
Combining a Grayscale Camera and Spectrometers for High Quality
Close-range Hyperspectral Imaging of Non-planar Surfaces
Stefan L
¨
orcks
a
and Josef Pauli
b
Intelligent Systems Group, University of Duisburg-Essen, Germany
Keywords:
Hyperspectral Imaging, Spectroscopy, Surface Analysis, Metrology, Calibration, Depth Map, Dataset.
Abstract:
In recent years, hyperspectral imaging (HSI) has emerged to become a crucial method for both remote sensing
and close-range surface analysis. In this paper, we present substantial upgrades of our previously published
system for multispectral and hyperspectral surface analysis (Hegemann et al., 2017). Besides minor changes
in illumination, we carefully evaluated different approaches for reflectance correction using up to eight cal-
ibration standards. Wavelength correction, which ensures an exact wavelength fit, is also done using a cali-
bration standard. Therefore, our calibration pipeline provides high-quality hyperspectral data that is mostly
independent of the hardware acquiring it, as we remove the impact of illumination and sensor sensitivity and
consequently solely dependent on the sample. Additionally, as the main contribution, we present a method to
acquire hyperspectral images from a non-planar surface using spectrometers without a time-consuming auto-
focus at every pixel position. We do this by generating a registered depth map from gray value images of the
sample. Since annotated hyperspectral data is in high demand, we also contribute two initial pixel-wise labeled
close-range hyperspectral datasets generated with our upgraded system for further research and benchmarks.
1 INTRODUCTION
Hyperspectral imaging (HSI) is well established in
remote sensing. With the increasing availability of
portable hyperspectral cameras in recent years, HSI
also became more prevalent in close-range surface
analysis with a wide range of applications (Khan
et al., 2018b). For example, HSI has been used to
estimate the biomass on a field (P
¨
ol
¨
onen et al., 2013)
or the damage of beetle infestation in a forest (N
¨
asi
et al., 2015). Furthermore, (Halicek et al., 2020) ex-
amined the impact of HSI for detecting tumors. Ex-
amples of the usage of HSI in the food industry are
listed in (Liu et al., 2017) and (Park and Lu, 2015).
Moreover, (Liang, 2012) shows how HSI is applied in
art analysis.
Hyperspectral imaging adds a spatial dimension
to spectroscopy. A spectrum is acquired at each po-
sition of a grid. Therefore, in a hyperspectral image,
each pixel contains not only one intensity value as in a
grayscale image but hundreds or even thousands of re-
flectance values for different wavelengths. The range
of wavelengths extends the visible light towards both
ultraviolet light as well as infrared light. A hyper-
a
https://orcid.org/0000-0003-3641-4734
b
https://orcid.org/0000-0003-0363-6410
spectral image has three dimensions: two spatial di-
mensions and one spectral dimension.
Hyperspectral cameras can acquire images using
different techniques. Commonly used approaches are
snapshot cameras (Hagen and Kudenov, 2013), push
broom (or linescan) cameras (Lu and Fei, 2014) and
whisk broom (or pointscan) cameras (Kerekes and
Schott, 2007). Whisk broom scanners follow a spa-
tial scanning scheme and acquire the full spectrum at
a single position at a time.
As always in metrology, calibration is essential in
hyperspectral imaging to produce useful data. Re-
flectance calibration (reflectance correction) is a com-
mon procedure in hyperspectral imaging to reduce
the impact of illumination and sensory equipment in
the data. (Burger and Geladi, 2005) suggested three
different models for the reflectance correction: sim-
ple, linear, and quadratic. Whereas the simple ap-
proach uses just one reflectance standard, the linear
and quadratic model can take several reflectance stan-
dards into account. The simple approach is the com-
monly used, e.g. in (Klein et al., 2008), (Yao and
Lewis, 2010), (Halicek et al., 2020).
When it comes to classifying hyperspectral data,
deep learning approaches are state of the art (Paoletti
et al., 2019), (Rasti et al., 2020). As these are su-
26
Lörcks, S. and Pauli, J.
Combining a Grayscale Camera and Spectrometers for High Quality Close-range Hyperspectral Imaging of Non-planar Surfaces.
DOI: 10.5220/0010789300003121
In Proceedings of the 10th International Conference on Photonics, Optics and Laser Technology (PHOTOPTICS 2022), pages 26-37
ISBN: 978-989-758-554-8; ISSN: 2184-4364
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

pervised learning methods, annotated data is essen-
tial for training and evaluation. Unfortunately, only
a few datasets with pixel-wise annotations are pub-
lically available, e.g., ”Indian Pines” (Baumgardner
et al., 2015), ”Salinas”, ”Pavia University”, ”Hous-
ton University”. These datasets all originate from re-
mote sensing. The available close-range datasets are
either not equipped with a pixel-wise ground truth or
provide just a low spectral resolution and range (Pao-
letti et al., 2019). For example, (Khan et al., 2018a)
provides a close-range HSI dataset of different mate-
rials (mainly textile) but just image-wise class labels
and wavelengths between 400 nm and 1,000 nm. To
the best of our knowledge, no pixel-wise annotated
close-range hyperspectral images comparable to the
datasets presented in this paper are publicly available
yet.
This paper is organized as follows: In chapter 2
the preliminary system is summarized. Then, the up-
grades made to the system to provide even better data
are described in chapter 3. Two annotated datasets
acquired with the system and published together with
this paper are presented in the second to last chapter.
The final chapter concludes the article and gives an
outlook on future work.
2 PRELIMINARY SYSTEM
Our imaging system consists of a gray value cam-
era and two spectrometers working in a whisk broom
scanning manner. This means that the spectrometers,
which share one objective, acquire a spectrum at one
spatial position (pixel) at a time. A hyperspectral im-
age is generated by scanning the sample such that the
objective is positioned at every pixel position. This is
done using a 3D Cartesian robot. The first axis car-
ries the sample (left/right). The measurement head
consisting of the gray value camera and the spec-
trometer head is mounted on a different part of the
Cartesian robot, moving in two directions (up/down,
front/back). These components are shown in figure 1.
The construction allows moving the sample and
objectives (of the camera and the spectrometers) to
acquire a hyperspectral image or a grayscale image
of the sample. Furthermore, the grayscale camera
and the spectrometer head are geometrically cali-
brated towards each other using a 2D calibration pat-
tern (Hegemann et al., 2017). This means their 3D-
translation and 2D-rotation are known. Therefore, a
part of the sample acquired with the camera can be
acquired with the spectrometer head easily by mov-
ing the robot axes the corresponding distances.
The grayscale camera used is the Baumer SXG80.
It provides a resolution of 3296 × 2472 pixels. The
Qioptiq inspect.x L objective is fixed. Focusing can be
done by adjusting the distance between the sample’s
surface and the camera (by moving the camera up and
down). The objective leads to a real-world pixel size
of 3.57 µm × 3.57 µm.
The two spectrometers used are the BaySpec Su-
per Gumet UV-NIR spectrometer (190 nm - 1,100 nm)
and the BaySpec Super Gamut NIR (900 nm - 1,700
nm). For better readability, we will denote the spec-
trometers as UV-NIR and NIR, respectively. They
are coupled to one Nikon TU Plan Fluor 10x objec-
tive using a dichroic mirror reflecting the light below
950 nm towards the UV-NIR spectrometer and light
above 950 nm towards the NIR spectrometer via op-
tical fibers. The field of view of the objective both
spectrometers share is a disc with a diameter of about
60 µm. The spectral resolution of the two spectrome-
ters differs as the UV-NIR provides 3648 bands with
a spectral resolution of 0.254 nm, whereas the NIR
spectrometer has a lower spatial resolution of 3.219
nm as it provides 256 bands. The distance between
the spectrometer head and sample (provided by the Z-
axis) has been determined using the geometrical cali-
bration.
The auto-focus of the spectrometer head is very
time-consuming. Therefore, an auto-focus is done us-
ing the grayscale camera. Afterwards, the spectrome-
ter head can be brought into the in-focus height using
the calibration between the objectives. This is suf-
ficient for a planar sample, where the whole sample
can be acquired at the same height. Unfortunately,
non-planar samples, where every pixel position needs
a different height to be in the focus of the spectrome-
ter head, are more challenging. A method to acquire
height adaptive hyperspectral images for non-planar
samples is presented in the next section, which sum-
marizes the improvements made to the system.
3 ADVANCED SYSTEM
The above described preliminary system has been up-
graded to provide hyperspectral images of better qual-
ity and from a broader range of samples. Therefore,
several changes in both hardware and software have
been made. The following section 3.1 describes how
the hardware has been changed to provide more dif-
fuse illumination. In section 3.2 the post-processing
of the raw data provided by the spectrometers into cal-
ibrated reflectance data is specified. A procedure to
acquire hyperspectral data from non-planar samples
is introduced in section 3.3. Finally, the possible ac-
quisition modes of the system are summarized in 3.4.
Combining a Grayscale Camera and Spectrometers for High Quality Close-range Hyperspectral Imaging of Non-planar Surfaces
27
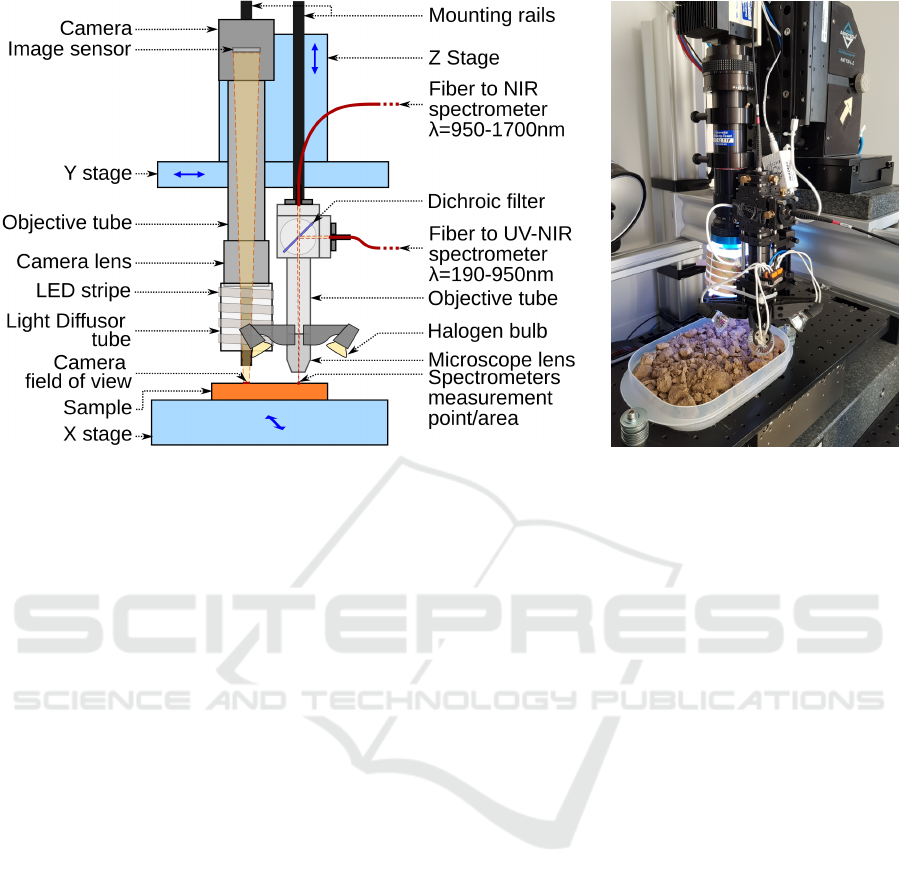
(a) Schematic of the measurement head and the axes. (b) Actual system inspecting soil.
Figure 1: The measurement head consists of the grayscale camera and their objective as well as the spectrometer head (both
equipped with illumination). Those are mounted to the Z-axis of the Cartesian robot which in turn is mounted to the Y-axis.
The sample is carried by the X-axis as can be seen in the schematic in (a) (Adapted from (Hegemann et al., 2017)). An image
of the actual system can be seen in (b).
3.1 Illumination Upgrades
In the preliminary system design, a low-cost, high
voltage halogen lamp has been used for one-
directional illumination underneath the spectrometer
head. This design has been suitable for planar sample
surfaces. For non-planar samples, though, illumina-
tion from just one side could lead to massive shad-
owing and, consequently, a low signal-to-noise ratio.
We, therefore, upgraded the illumination design for
the spectrometers by mounting custom-designed 3D
printed halogen bulb holders to the spectrometer head
(see figure 1). This means the sample under the lens
center is now illuminated from four directions with 90
degrees between the lamps. This ensures that the sam-
ple is still brightly illuminated even if the non-planar
surface of the sample blocks some light.
The illumination for the grayscale camera has
been upgraded as well. Beforehand, five different
LED lamps (”white”, red, green, blue, IR) mounted
in different positions have been used. Naturally, they
illuminated the sample from different angles leading
to different shadows on non-planar surfaces. Also,
gloss reflections have been an issue with shiny sur-
faces (such as metal) as the used diffusor did not have
the expected impact. We improved this by coiling a
LED stripe directly around the diffusor. The solution
provides a very diffuse light from all directions.
3.2 Postprocessing of the Measured
Data
Two post-processing steps are applied on the data pro-
vided by the spectrometers: reflectance correction and
wavelength correction. Why they are needed and how
we use them is described in detail in this section.
3.2.1 Reflectance Correction
The raw measurements a spectrometer delivers are
so-called digital numbers (DN). Their range depends
on the analog-to-digital converter in the spectrome-
ter. The digital number for a specific wavelength de-
pends on the illumination (amount of photons of this
wavelength emitted by the source), on the reflectance
(amount of the incoming photons of this wavelength
reflected by the sample), and the sensitivity of the sen-
sor (quantum efficiency for this wavelength). Usually,
one is interested in the characteristic of the sample
and not so much in the illumination or the sensor’s
sensitivity. Therefore, we use reflectance correction
approaches to estimate the sample reflectance based
on the measured digital numbers.
Let λ be the wavelength in nanometers. The dig-
ital numbers and the reflectance for a specific wave-
length are denoted by DN(λ) and R(λ), respectively.
The dark current, which is the sensor’s output with-
out illumination, depends on the wavelength λ as
PHOTOPTICS 2022 - 10th International Conference on Photonics, Optics and Laser Technology
28

well. Therefore, we denote it as D(λ). If for at
least one object the reflectance R(λ) would be known
(and the digital numbers DN(λ) have been measured),
one would have pairs of corresponding values R(λ)
and DN(λ) for each wavelength. Such objects with
a known reflectance are called reflectance standards.
For a reflectance standard the reflectance R
st
(λ) is
known. Using this one reflectance standard as the
sample, we measure the digital numbers DN
st
(λ).
For the reflectance correction (Klein et al., 2008)
suggest
R(λ) = R
st
(λ) ·
DN(λ)− D(λ)
DN
st
(λ) − D(λ)
, (1)
which allows us to calculate the reflectance of a sam-
ple for every wavelength, given the digital numbers
of the sample, the dark current, the digital numbers of
the reflectance standard and the reflectance of the re-
flectance standard. This is what (Burger and Geladi,
2005) call the simple model. Here, only one re-
flectance standard is required besides the dark cur-
rent. Typically, a ”white” standard is used, which re-
flects all wavelengths almost completely. (Burger and
Geladi, 2005) also suggest
R(λ) = b
1
(λ) · DN(λ) + b
0
(λ), (2)
and
R(λ) = b
2
(λ) · DN(λ)
2
+ b
1
(λ) · DN(λ) + b
0
(λ),
(3)
which they call the linear model and quad(ratic)
model, respectively. Here, the reflectance is inter-
preted as a polynomial function of the digital num-
bers. The coefficients b
0
(λ), b
1
(λ) and possibly b
2
(λ)
are estimated using several reflectance standards and
least-squares regression. The dark current can be used
as well but unlike in the simple model it is not re-
quired. Based on these proposals, we formulate a cu-
bic model
R(λ) =b
3
(λ) · DN(λ)
3
+ b
2
(λ) · DN(λ)
2
+ b
1
(λ) · DN(λ) + b
0
(λ). (4)
We evaluated all four models (eq. 1: simple
model, eq. 2 linear model, eq. 3: quadratic model,eq.
4: cubic model) by means of the following steps:
1. Measurement of the digital numbers of the dark
current and eight Zenith Polymer
®
reflectance
standards by SphereOptics.
2. Calculation of the coefficients of all wavelengths
for all four models based on (subsets of) these
measurements.
3. Application of the models to the measurements
and evaluation of the estimated reflectances, both
quantitative and qualitative.
These steps are described in detail in the following
paragraphs.
Measurements. The standards have the nominal re-
flectances 99 %, 80 %, 60 %, 50 %, 25 %, 10 %, 5
% and 2.5 %. The exact wavelength-dependent re-
flectance values R
st
(λ) are provided with the stan-
dards. The Zenith Polymer
®
reflectance standards
have non-homogeneous surfaces. They consist of
brighter and darker parts, whose ratio is such that
the surfaces have the aspired reflectance on average.
Because of this spatial divergence, it is necessary to
acquire a surface patch and not just one position.
We use 62,500 measurements over an area of about
15 mm × 15 mm. These measurements are averaged
to reduce the noise and come up with digital numbers
of the reflectance standards DN
st
(λ). They are visual-
ized in figure 2a.
One can see the decrease in digital numbers from
the 99 % standard to the 2.5 % standard for each
wavelength. It is also obvious why reflectance cor-
rection is necessary: If the illumination and the spec-
trometer sensitivity were wavelength-independent,
the digital numbers should form a horizontal line for
each standard, which is not the case. One can also see
the difference in spectral resolution between the spec-
trometers. While the measurements of the UV-NIR
spectrometer almost appear as a continuous line, the
data produced by the NIR spectrometer is discrete and
has a lower spectral resolution. Another effect that
can be seen here is the dichroic mirror which leads to
lower digital numbers around 950 nm and therefore a
lower signal-to-noise ratio. Additionally to the eight
reflectance standards also the dark current has been
measured.
Calculations. For calculating the coefficients of the
models, we used different subsets of the measure-
ments. For the simple model (eq. 1), just the measure-
ments of the standard with the highest reflectance and
the dark current are used. The simple model has two
variants: The first (”simple100”) assumes the stan-
dard to be fully reflective for all wavelengths, which
leads to R
st
(λ) = 1 for all wavelengths. The sec-
ond variant (”simple99”) takes the actual reflectance
of the standard into account. For the linear, the
quadratic, and the cubic model, we calculate two
variants each: Based on the eight reflectance stan-
dards (”linear8”, ”quad8” and ”cubic8”) as well as
on the eight standards and the dark current (”linear9”,
”quad9” and ”cubic9”). Here, the coefficients are de-
termined using a least-squares polynomial fitting.
Evaluation. After calculating the coefficients for all
model variants, we evaluated the variants on the mea-
surements of the reflectance standards and the dark
current. The models have been applied to all 62,500
Combining a Grayscale Camera and Spectrometers for High Quality Close-range Hyperspectral Imaging of Non-planar Surfaces
29
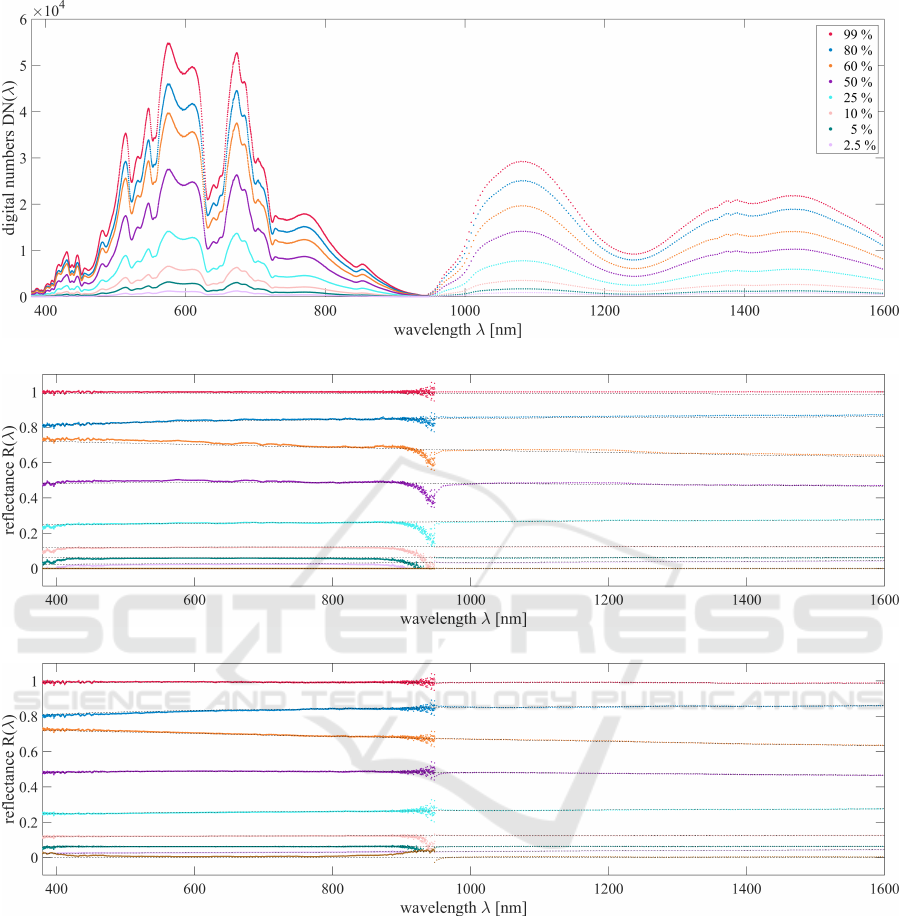
(a) Before reflectance correction: Spatially averaged digital numbers after dark current subtraction.
(b) After reflectance correction using the ”simple100” model.
(c) After reflectance correction using the ”cubic8” model.
Figure 2: The average digital numbers (a) are far from the ideal horizontal lines for all standards. The reflectance correction
results for ”simple100” model (b) and ”cubic8” model (c) both show a clear improvement to the digital numbers. The gray
dashed lines show the true reflectance values of the standards, while the colored dots show the results of the reflectance
correction. The colors correspond to the digital numbers in (a).
positions, and afterwards, the median reflectance has
been determined. These median values have then
been compared to the actual reflectance values by
calculating the mean absolute error (MAE) over all
wavelengths. Table 1 lists the errors for all model
variants and all standards, as well as the dark current,
denoted as ”0 %”. Additionally, for each model vari-
ant, the average over the MAEs of all standards has
been determined. As the values are relatively small,
they are given per thousand (‰). The common ”sim-
ple100” model has the worst results. They can be im-
proved by using the standard’s real reflectance val-
ues, which is done in ”simple99”. The polynomial
regressions result in even lower average errors. The
usage of the dark current on top of the reflectance
standards deteriorates the results. The best effect can
be achieved using the ”cubic8” model. The median
reflectances of the ”simple100” model are shown in
PHOTOPTICS 2022 - 10th International Conference on Photonics, Optics and Laser Technology
30

figure 2b. The model systematically overestimates the
reflectance for the brighter standards (99 %, 80 %, 60
%, and 50 %). For all standards, there are two prob-
lematic wavelengths areas. The first is around 400
nm, where the given illumination is too low. The sec-
ond is the area around 950 nm, where the sensitivity
of the spectrometers is relatively low and the dichroic
mirror decreases the signal as well.
Figure 2c, presenting the reflectance correction
results using the best-performing ”cubic8” model,
shows an improvement for most standards and the
dark current compared to the ”simple100” model.
3.2.2 Wavelength Correction
By doing the reflectance correction, we calibrated the
ordinate of our reflectance data (vertical alignment).
However, one can also calibrate the abscissa. This
corresponds to the question: Does the digital num-
ber, which the spectrometer provides for some wave-
length λ
SM
, belong to this exact wavelength or maybe
to a slightly higher or lower wavelength λ? We use a
Zenith Polymer
®
wavelength standard by SphereOp-
tics, which is enriched with rare-earth oxides. This
leads to sharp peaks in the reflectance curve at known
wavelengths. Acquiring an image of the reflectance
standards allows adjusting the measured peaks to the
known wavelengths.
The reflectance of the wavelength standard-based
measurements by both spectrometers as well as the
true reflectance of the standard is shown in figure 3a
- The peaks of the NIR spectrometer reflectance and
the true reflectance match. However, the reflectance
acquired by the UV-NIR spectrometer shows a clear
mismatch. The provided wavelengths are too high and
need to be adjusted.
The model used for wavelength adaption is a sec-
ond degree polynomial (quadratic function):
λ(λ
SM
) = a
2
· λ
2
SM
+ a
1
· λ
SM
+ a
0
To find optimal values for the coefficients a
2
, a
1
, a
0
a
polynomial regression is done based on correspond-
ing pairs of (manually selected) peaks (10 for the UV-
NIR spectrometer, 5 for the NIR spectrometer).
The resulting reflectances after applying the wave-
length correction are visualized in figure 3b. Notice-
ably, the peaks in the range of the UV-NIR spectrom-
eter match significantly better than without the wave-
length correction.
3.2.3 Overall Postprocessing
For the reflectance correction to work correctly, it is
necessary to have the wavelengths corrected. Other-
wise, the wrong reflectance values are used for esti-
mating the model. However, for the wavelength cali-
bration, it is required to have reflectance values. This
problem is solved by a three-step procedure. First,
a reflectance correction is done. The resulting re-
flectance curves are used in a second step to deter-
mine the peak positions and perform the wavelength
correction. As just the peak position on the wave-
length axis is important here, it is neglectable that
the height does not fit exactly. On the now matching
wavelengths, the reflectance correction can be done
as the third and final step. Once the coefficients for
wavelength and reflectance correction are determined,
they can be used to convert the digital numbers from
a sample into reflectance values, which are only de-
pendent on the sample.
3.3 Height Adaptive Spectroscopy for
Non-planar Samples
The acquisition of hyperspectral images from planar
samples has been possible with our system in the
past. This has been sufficient as the system was built
for surface inspection of steel plates (Herwig et al.,
2012). However, to be able to examine a wider variety
of samples (namely those with a non-planar surface),
we decided to upgrade the system accordingly.
Acquiring images from non-planar samples is
easy for cameras with a broad depth of field. How-
ever, for a spectrometer-based whisk broom solution
with a narrow depth of field, acquiring data from non-
planar samples is difficult. The naive way is to do an
autofocus procedure with the spectrometer at every
pixel position. Yet, this is very time-consuming as for
every pixel position the hyperspectral image has to be
acquired in all possible heights.
Instead, we propose a procedure making use of
the grayscale camera, which can acquire an area in-
stead of just one position. We use the grayscale cam-
era to estimate the height of the sample at every point.
Knowing the height, the spectrometer head can be po-
sitioned accordingly and the spectra can be acquired
in focus for a non-planar sample.
The grayscale camera’s objective is tuned to pro-
vide a narrow depth of field. This means, for a part of
the image to be in focus, the range of heights is very
small. Figure 4 shows the Brenner focus measure (eq.
5) for different heights. The full width at half maxi-
mum (FWHM) is about 0.31 mm. The same holds for
the spectrometer head (FWHM of UV-NIR: 1.4 mm,
FWHM of NIR: 1.2 mm) as shown in figure 4. Based
on the geometric calibration, the offset between the
focus heights of the grayscale camera and spectrom-
eter is known (Hegemann et al., 2017). Therefore,
if the focus heights of the whole sample are known
Combining a Grayscale Camera and Spectrometers for High Quality Close-range Hyperspectral Imaging of Non-planar Surfaces
31
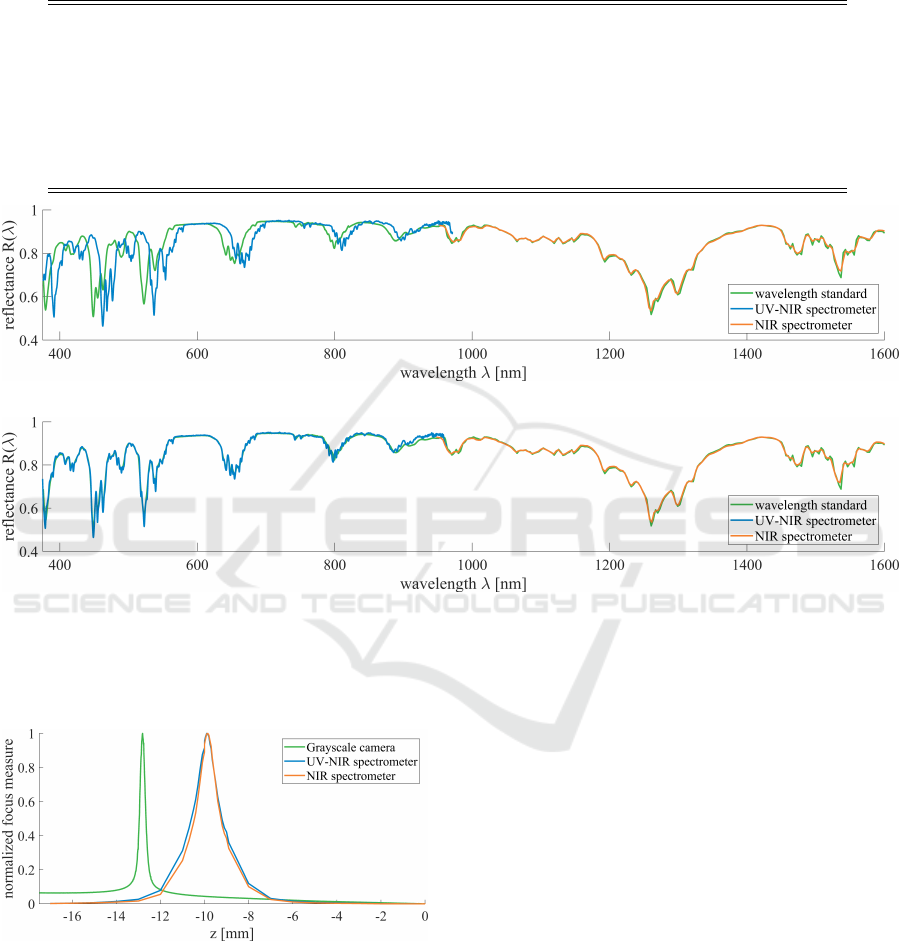
Table 1: The reflectance correction model variants are applied to the 62,500 measurements of each reflectance standard and
dark current and the median reflectance is determined. For all variants, the mean absolute error between median reflectance
and true reflectance is listed for every standard, the dark current, and in average. All values are per thousand (‰).
Model variant 99 % 80 % 60 % 50% 25% 10% 5% 2.5% 0% Average
simple100 8.39 4.60 12.44 9.62 5.40 8.16 9.04 8.70 0.06 7.38
simple99 1.62 4.83 8.88 7.97 6.20 9.06 9.46 8.86 0.06 6.33
linear8 4.06 4.94 6.22 5.59 2.14 2.38 2.11 3.15 8.14 4.30
linear9 4.12 4.81 6.27 5.56 2.29 3.54 3.47 3.79 6.27 4.46
quad8 2.22 5.11 3.96 1.91 2.45 2.67 1.55 1.54 10.10 3.50
quad9 1.90 4.85 4.57 2.37 2.69 4.16 3.60 2.43 6.85 3.71
cubic8 2.24 5.04 3.78 1.92 2.12 2.61 1.72 1.00 9.90 3.37
cubic9 2.58 5.70 3.44 2.49 1.74 3.46 3.80 3.12 5.74 3.56
(a) Before wavelength correction.
(b) After wavelength correction.
Figure 3: The reflectance of the wavelength standard shows several sharp peaks due to the rare-earth oxides. These peaks
are used to calibrate the wavelength axis. The true reflectance of the standard as well as the reflectance acquired by both
spectrometers (UV-NIR and NIR) before the wavelength correction are visualized. The UV-NIR spectrometer has a large
offset before the correction (a) which is diminished after the correction (b).
Figure 4: Focal stacks have been acquired with the
grayscale camera and both spectrometers for a plane sam-
ple. The normalized Brenner focus measure has been cal-
culated for all heights for all three sensors. The three curves
show a clear and sharp peak which corresponds to the nar-
row depth of field of the objectives. Because of the narrow
depth of field of the camera, the height can be estimated
based on the focus measure.
for the grayscale camera, which is relatively easy to
achieve, the focus heights for the spectrometer head
are known just by adding the offset. The focus heights
can be thought of as a depth map as well. The follow-
ing section describes how it is generated.
3.3.1 Depth Map Generation
The depth map modeling the surface height of the
sample is generated out of a focal stack (a stack of
pictures taken at different heights) produced by the
grayscale camera. The focal stack consists of images
f
im
z
where z denotes the height at which the images
have been taken. The z-axis provides values between
−17.5 mm and 17.5 mm. For the focal stack, we use
a step size of 0.1 mm. This means a focal stack can
contain up to 351 images.
On every image in the focal stack, a focus mea-
sure is applied. A focus measure takes an image as
PHOTOPTICS 2022 - 10th International Conference on Photonics, Optics and Laser Technology
32

input and returns a value for every pixel describing
how much this pixel is in focus. A wide variety of
focus measures is available (Pertuz et al., 2013). As
a trade-off between accuracy and time consumption,
we use a variation of the Brenner focus measure to
come up with a value for every pixel position (i, j):
FM
z
(i, j) =| f
im
z
(i, j) − f
im
z
(i + 2, j)|
+ | f
im
z
(i, j) − f
im
z
(i, j + 2)| (5)
The resulting pixel-wise focus measure FM
z
is af-
terwards averaged on blocks of 56 px × 56 px (≈
0.2 mm×0.2 mm) leading to the mean focus measure
FM with a lower spatial resolution.
This spatial resolution is sufficient for the depth
map but avoids unnecessary computational cost. The
depth map is generated by evaluating at which height
the focus measure reaches its maximum for every
block (k, l):
DM(k, l) = argmax
z
FM
z
(k, l)
Similarly, an all-in-focus image can be extracted out
of the focal stack. Figure 5 shows an example. Three
gray value images out of the focal stack are shown in
(a)-(c) and the corresponding mean focus measures in
(e)-(g). The all-in-focus image is shown in (d), the
resulting depth map is visualized in (h).
Using the geometrical calibration, the average x
and y world coordinates for each entry of the depth
map are determined. The value of the depth map is
the z world coordinate.
3.3.2 Height Adaptive HSI
The described depth map generation is done for every
focal stack. The focal stacks have a slight overlap and
cover the whole sample. The resulting world coor-
dinates are combined into a single three-dimensional
point cloud. Because of the construction of the sys-
tem, the camera and the spectrometer head have a
different field of view (FOV). Their FOVs have an
overlapping area, whose width is 3 cm. To be able
to acquire data from larger samples, we first place the
sample in the FOV of the camera to come up with
the depth map. Afterwards, the sample is placed in
the spectrometer FOV and partly in the overlapping
area. Another smaller depth map is generated in the
overlapping area. The resulting point clouds are reg-
istered using the iterative closest point (ICP) algo-
rithm to come up with the sample height mapped to
the position in the spectrometer FOV. For all (x, y)
coordinates where the spectrum should be acquired,
the height is estimated out of the point cloud us-
ing nearest-neighbor interpolation. The spectrometer
head is then moved to the corresponding position and
measurements are taken in focus.
Figure 6 shows an example of the improvement of
the adaptive height HSI measurements for non-planar
samples. A stack of coins has been used as a non-
planar sample. It is shown in figure 6a. Two hy-
perspectral images of the sample have been acquired:
One at a fixed height (as so far used for planar sam-
ples) and one at adapted heights based on the before-
hand explained procedure. To visualize the differ-
ences between the two hypercubes, pseudo RGB im-
ages have been created out of them. The fixed height
hyperspectral image is in focus for the second-highest
coin. However, parts of the sample, which are lower
or higher, are blurry. In contrast, in the height adap-
tive hyperspectral image, where a depth map of the
sample has been used to adjust the height of the spec-
trometer head for every pixel, all parts of the sample
are in focus.
Using the adaptive height procedure, we can now
acquire hyperspectral images from non-planar sam-
ples, including but not limited to cereal flakes, soil,
and plant parts.
3.4 Acquisition Modes
With the previously mentioned upgrades of our sys-
tem, we can now acquire high-quality data for surface
analysis with high spatial and spectral resolution. Not
all the bands provided by the spectrometers are used
due to the low illumination in the ultraviolet range, the
dichroic mirror, and some dead pixels in the UV-NIR
spectrometer. The specifications of the acquired data
and the size of potential samples are given in table 2.
For planar samples, we can acquire (stitched)
grayscale images as described in (Hegemann et al.,
2017). For non-planar samples, a depth map can be
estimated and an all-in-focus grayscale image can be
provided. Hyperspectral images can be acquired off
from both planar and non-planar samples. Out of the
hyperspectral data a pseudo RGB image can be cre-
ated as shown in figures 6b, 6c.
4 DATASETS
For supervised machine learning annotated datasets
are essential, which are expensive and time-
consuming to create and difficult to obtain since they
are often not publicly available. To the best of our
knowledge, all publicly available pixel-wise anno-
tated datasets originate in remote sensing. In this
paper, we present two pixel-wise labeled hyperspec-
tral datasets from a close-range setting. They can
Combining a Grayscale Camera and Spectrometers for High Quality Close-range Hyperspectral Imaging of Non-planar Surfaces
33

(a) f
im
z=−17.4 mm
(b) f
im
z=−4.3 mm
(c) f
im
z=−1.0 mm
(d) All-in-focus image.
(e) FM
z=−17.4 mm
(f) FM
z=−4.3 mm
(g) FM
z=−1.0 mm
(h) Depth map DM.
Figure 5: For the depth map generation, a focal stack of grayscale images at the same position but at different heights is used.
Three images for different heights are shown in a), b) and c). The corresponding focus measures are visualized in e), f) and g).
The final depth map generated out of all 351 images for z = −17.5, −17.4, . . . , 17.5 mm is shown in h). Based on the depth
map a all-in-focus image (d) can be extracted out of the focal stack.
Table 2: Specifications of the acquired data and possible sample sizes.
grayscale camera UV-NIR spectrometer NIR spectrometer
Maximal sample size (x × y × z) 40 cm × 10 cm × 3 cm 40 cm × 8 cm × 3 cm 40 cm × 8 cm × 3 cm
Spatial resolution 3.57 µm 60 µm 60 µm
Spectral resolution - 0.254 nm 3.219 nm
Wavelengths used - 390 nm − 944 nm 944 nm − 1600 nm
Number of bands used 1 2196 206
(a) Nonplanar
sample: stack of
coins.
(b) Pseudo RGB
of fixed height
hsi.
(c) Pseudo RGB
of adaptive height
hsi.
Figure 6: A hyperspectral image of the stack of coins shown
in (a) has been created in two different ways. First using a
fixed heights as if the sample is planar. The second time
with a adaptive height based on a depth map created out of
grayscale images. Pseudo RGB images for both hyperspec-
tral images are shown in (b) and (c).
be downloaded at https://www.is.uni-due.de/datasets.
Both datasets consist of the three-dimensional array
of reflectance data, a list of classes, the pixel-wise
annotation (ground truth), and a pseudo RGB image
generated from the hyperspectral data. The datasets
have in common that the spectra show high intra-class
variability. This means that the classes cannot be dis-
tinguished by a naive approach like thresholding at
one wavelength.
4.1 Cereals Dataset
The cereals dataset shows an image of five differ-
ent types of cereal flakes (oats, wheat, spelt, rice,
rye). The real world dimensions of the sample are
5 cm × 5 cm. The spatial resolution of the hypercube
is 500 × 500, the spectral domain consists of 2402
bands ranging from 380 nm to 1600 nm.
The whole hypercube is shown in figure 7a, the
pseudo RGB image in figure 7b and the annotation
is visualized in figure 7c. Three randomly selected
spectra of each class are plotted in figure 7d. Table 3
lists all classes and their number of occurrences.
Table 3: Classes of the cereals dataset.
label class number of samples
0 background 113,160
1 oat 22,380
2 rice 16,562
3 rye 28,481
4 spelt 33,613
5 wheat 35,804
total: 250,000
PHOTOPTICS 2022 - 10th International Conference on Photonics, Optics and Laser Technology
34
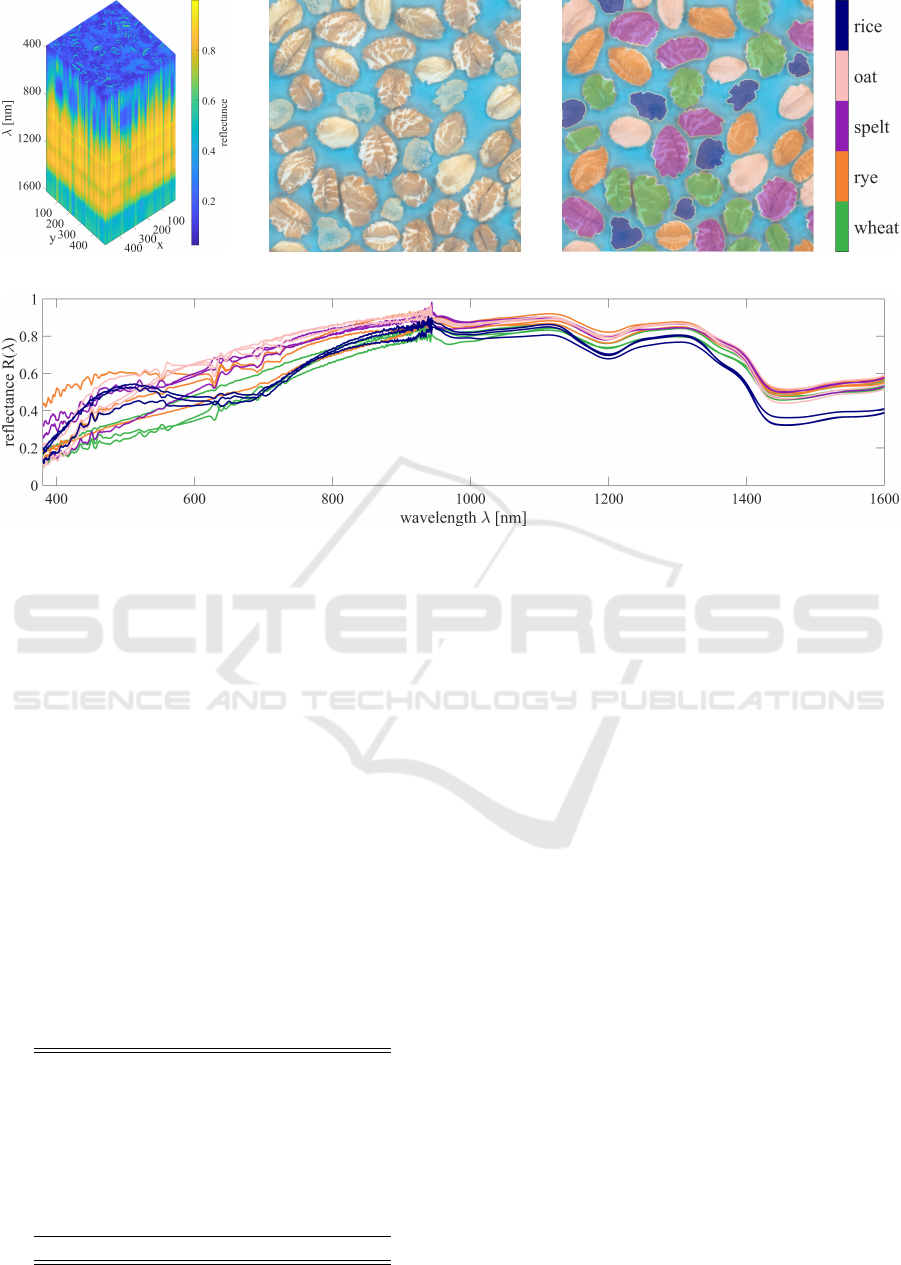
(a) Hypercube. (b) Pseudo RGB image. (c) Labels.
(d) Three (randomly selected) spectra from each class.
Figure 7: The cereals dataset presented in this paper contains flakes made of oat, wheat, spelt, rice and rye. The sample has a
size of 5 cm× 5 cm, the hypercube (a) has the dimensions 500× 500 × 2402. Out of the hyperspectral data a pseudo RGB (b)
can be created. The annotation (c) is essential to train supervised classifiers on the dataset. Three (randomly selected) spectra
from each class are shown in (d). The colors of the spectra matches the labels (c).
4.2 Field Dataset
The field dataset consists of materials occurring on
a field (soil, two types of stones, leaf, ear, catkin,
branch). The sample dimensions are 2.66 cm ×
3.8 cm. The resolution of the hypercube (figure 8a)
is 266 × 380 × 2402.
The pseudo RGB image (figure 8b) and the anno-
tation of the dataset (figure 8c) are part of the dataset.
Three randomly selected spectra of each class are
plotted in figure 8d. Table 4 lists all classes and their
amount.
Table 4: Classes of the field dataset.
label class number of samples
0 background 17,570
1 soil 41,136
2 stone 1 3,204
3 stone 2 7,987
4 ear 9,691
5 branch 5,175
6 catkin 2,111
7 leaf 14,206
total: 101,080
5 CONCLUSIONS
After summarizing the preliminary system for high-
resolution grayscale imaging and spectroscopy, we
presented the upgrades made to the system. Be-
sides new illuminations for both the gray value cam-
era and the spectrometers, these upgrades are mostly
software-based. We discussed the need and possi-
ble ways to do reflectance correction. The evaluation
suggested that a cubic model outperforms the ”sim-
ple100” approach, which is commonly used. There-
fore, a cubic approach should be preferred if enough
reflectance standards are available. Wavelength cor-
rection has been shown to be both essential and prac-
ticable using a polynomial regression approach.
We presented a procedure to acquire hyperspectral
images of non-planar samples with a spectrometer us-
ing a grayscale camera for focusing. The grayscale
camera has been used to provide a depth map of the
sample. The spectrometer objective is moved accord-
ingly to keep the sample in focus. This allows us to
acquire sharp hyperspectral images from non-planar
samples. Two datasets acquired like that are pub-
lished with this paper. The first sample contains dif-
ferent sorts of cereal flakes; the second sample con-
Combining a Grayscale Camera and Spectrometers for High Quality Close-range Hyperspectral Imaging of Non-planar Surfaces
35
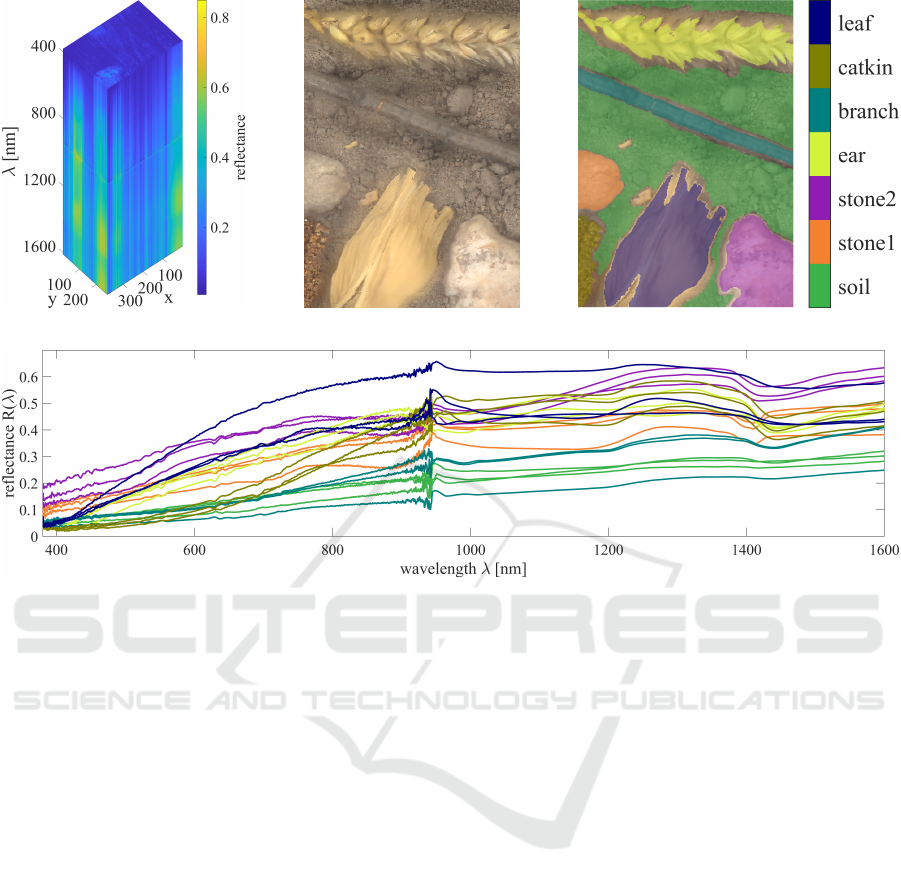
(a) Hypercube. (b) Pseudo RGB image. (c) Labels.
(d) Three (randomly selected) spectra from each class.
Figure 8: The field dataset contains the classes soil, stones, leaf, ear, catkin and branch. The hypercube (a) has the dimensions
266 × 380 × 2402. Out of the hyperspectral data a pseudo RGB (b) can be created. The annotation (c) is used to train
supervised classifiers. Three (randomly selected) spectra from each class are shown in (d). The colors of the spectra matches
the labels (c).
sists of soil, stones, and plant materials occurring on
a field. As we provide annotated datasets, they can be
used for supervised machine learning such as CNNs.
Possible future upgrades for the presented system
include a confocal illumination for the spectrometer
head. This would allow illuminating just the cur-
rently acquired part of the sample and therefore ex-
pand the range of possible samples to include light-
and heat-sensitive materials. Another improvement
could be made regarding the dichroic filter: An op-
tical path, which would introduce less noise at the
overlap between the spectrometers, would improve
the data quality even further. The impact of the fil-
ter is currently the biggest drawback for the quality of
the data.
Besides these system-related considerations, our
future research will mainly deal with the analy-
sis of the acquired data. Here, our system offers
unique opportunities regarding the combination of
high-resolution grayscale images and hyperspectral
images with both a high spectral resolution and a
broad range of supported wavelengths.
REFERENCES
Baumgardner, M. F., Biehl, L. L., and Landgrebe, D. A.
(2015). 220 band aviris hyperspectral image data set:
June 12, 1992 indian pine test site 3.
Burger, J. and Geladi, P. (2005). Hyperspectral nir image
regression part i: calibration and correction. Journal
of Chemometrics.
Hagen, N. A. and Kudenov, M. W. (2013). Review of snap-
shot spectral imaging technologies. Optical Engineer-
ing.
Halicek, M., Dormer, J. D., Little, J. V., Chen, A. Y., and
Fei, B. (2020). Tumor detection of the thyroid and
salivary glands using hyperspectral imaging and deep
learning.
Hegemann, T., B
¨
urger, F., and Pauli, J. (2017). Com-
bined high-resolution imaging and spectroscopy sys-
tem - a versatile and multi-modal metrology platform.
In Proceedings of the 5th International Conference on
Photonics, Optics and Laser Technology - Volume 1:
PHOTOPTICS,. SciTePress.
Herwig, J., Buck, C., Thurau, M., Pauli, J., and Luther, W.
(2012). Real-time characterization of non-metallic in-
clusions by optical scanning and milling of steel sam-
ples. In Optical Micro-and Nanometrology IV.
PHOTOPTICS 2022 - 10th International Conference on Photonics, Optics and Laser Technology
36

Kerekes, J. P. and Schott, J. R. (2007). Hyperspectral imag-
ing systems. Hyperspectral data exploitation: Theory
and applications.
Khan, H. A., Mihoubi, S., Mathon, B., Thomas, J.-B., and
Hardeberg, J. Y. (2018a). Hytexila: High resolution
visible and near infrared hyperspectral texture images.
Sensors.
Khan, M. J., Khan, H. S., Yousaf, A., Khurshid, K., and
Abbas, A. (2018b). Modern trends in hyperspectral
image analysis: A review. IEEE Access.
Klein, M. E., Aalderink, B. J., Padoan, R., Bruin, G. D., and
Steemers, T. A. G. (2008). Quantitative hyperspectral
reflectance imaging. Sensors.
Liang, H. (2012). Advances in multispectral and hyperspec-
tral imaging for archaeology and art conservation. Ap-
plied Physics A.
Liu, Y., Pu, H., and Sun, D.-W. (2017). Hyperspectral imag-
ing technique for evaluating food quality and safety
during various processes: A review of recent applica-
tions. Trends in food science & technology.
Lu, G. and Fei, B. (2014). Medical hyperspectral imaging:
a review. Journal of biomedical optics.
N
¨
asi, R., Honkavaara, E., Lyytik
¨
ainen-Saarenmaa, P.,
Blomqvist, M., Litkey, P., Hakala, T., Viljanen, N.,
Kantola, T., Tanhuanp
¨
a
¨
a, T., and Holopainen, M.
(2015). Using uav-based photogrammetry and hyper-
spectral imaging for mapping bark beetle damage at
tree-level. Remote Sensing.
Paoletti, M., Haut, J., Plaza, J., and Plaza, A. (2019). Deep
learning classifiers for hyperspectral imaging: A re-
view. ISPRS Journal of Photogrammetry and Remote
Sensing.
Park, B. and Lu, R. (2015). Hyperspectral imaging technol-
ogy in food and agriculture. Springer.
Pertuz, S., Puig, D., and Garcia, M. A. (2013). Analysis of
focus measure operators for shape-from-focus. Pat-
tern Recognition.
P
¨
ol
¨
onen, I., Saari, H., Kaivosoja, J., Honkavaara, E., and
Pesonen, L. (2013). Hyperspectral imaging based
biomass and nitrogen content estimations from light-
weight uav. In Remote Sensing for Agriculture,
Ecosystems, and Hydrology XV. International Society
for Optics and Photonics.
Rasti, B., Hong, D., Hang, R., Ghamisi, P., Kang, X.,
Chanussot, J., and Benediktsson, J. A. (2020). Fea-
ture extraction for hyperspectral imagery: The evo-
lution from shallow to deep: Overview and toolbox.
IEEE Geoscience and Remote Sensing Magazine.
Yao, H. and Lewis, D. (2010). Spectral preprocessing and
calibration techniques. In Hyperspectral imaging for
food quality analysis and control. Elsevier.
Combining a Grayscale Camera and Spectrometers for High Quality Close-range Hyperspectral Imaging of Non-planar Surfaces
37
