
Coordinated Collision-free Movement of Groups of Agents
Ji
ˇ
r
´
ı
ˇ
svancara
a
, Marika Ivanov
´
a and Roman Bart
´
ak
b
Charles University, Faculty of Mathematics and Physics, Prague, Czech Republic
Keywords:
Coordinated Movement, Multi-agent, Path Finding, SAT Model.
Abstract:
Coordinating the movement of groups of autonomous agents in a crowded environment is a vital problem with
application areas such as warehousing, computer games, or drone art. In this paper, we study the problem of
finding collision-free paths for groups of agents such that the groups are kept together like a flock, a fish school,
or a military unit. Specifically, we analyze the properties of the problem, propose a SAT formulation based
on network flows, and perform a numerical experimental evaluation on various instance types. The results
suggest that it is a challenging problem with promising research and application potential. Furthermore, we
demonstrate the functionality of our solution method on real educational robots.
1 INTRODUCTION AND
MOTIVATION
In this paper, we introduce the Connected Colored
MAPF problem that consists of multiple teams of
agents deployed in a shared, fully observable environ-
ment with possible static obstacles. The agents then
move in a coordinate collision-free manner towards
given target locations. For each team, the number of
target locations equals the number of agents in the
team. Agents within one team are interchangeable,
that is, an agent aims to reach any of the targets as-
sociated with its team. A goal state occurs as soon as
every agent reaches any of its relevant targets.
Individual teams do not compete or harm each
other. They may cooperate in reaching their respec-
tive targets, for example, by waiting and letting an-
other agent pass. The agents within one team are re-
quired to remain close to each other at any time during
their movement. Such coordination ensures, e.g., the
possibility to communicate with each other in a multi-
hop fashion.
Practical applications of Connected Colored
MAPF include but are not limited to the video
game industry, drone formation control, or ware-
house robots. In real-time strategic games, individ-
ual military units are sometimes required to preserve
a specific formation when relocating to a given area
in the environment. Multi-UAV (unmanned aerial
a
https://orcid.org/0000-0002-6275-6773
b
https://orcid.org/0000-0002-6717-8175
vehicle) cooperative formation flight is to arrange
drones with autonomous flight functions according
to the designed three-dimensional space structure so
that the drones keep a stable formation during the
flight and can change the formation shape accord-
ing to mission needs and environmental changes (Li
et al., 2020). Drone art shows may enhance the au-
dience’s aesthetic experience during musical perfor-
mances. Applications involving multiple robots mov-
ing in a crowded environment may require communi-
cation maintenance among the robots.
1.1 Relevance to Other Problems
Multi-Agent Path Finding (MAPF) is a rapidly devel-
oping and widely studied area dealing with finding
collision-free paths from initial to target locations for
a set of agents from moving in a given environment.
In the classical MAPF problem, each agent is asso-
ciated with a unique destination. However, there are
applications where the agents need to move to spe-
cific areas, but the exact locations of agents in these
areas are not important. An example of such situation
is when warehouse robots of the same type need to
relocate to uniform charging stations at the end of a
shift. This variant of MAPF is known as Anonymous
MAPF.
A generalized version of Anonymous MAPF, re-
ferred to as Colored MAPF, assumes multiple groups
of agents with specified areas of destinations for each
group. Colored MAPF problems can be found in
computer games, where armies of bots are moving to
26
Švancara, J., Ivanová, M. and Barták, R.
Coordinated Collision-free Movement of Groups of Agents.
DOI: 10.5220/0010789100003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 1, pages 26-33
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

locations specified by the player (Ma et al., 2017). Po-
sitions of individual bots are not distinguished, but the
groups should reach their destinations. There are sim-
ilar situations in transportation problems, for exam-
ple, in warehouses (Ma and Koenig, 2016). Anony-
mous MAPF can be solved makespan-optimally in
polynomial time (Yu and LaValle, 2012); however,
finding a makespan-optimal solution to MAPF is NP-
hard (Surynek, 2010; Ratner and Warmuth, 1990).
As (Connected) Colored MAPF is a generalization of
classical MAPF, where each agent has its destination,
the NP-hardness result applies to (Connected) Col-
ored MAPF as well.
There exist both imperative and declarative
methods for finding a makespan-optimal solution
to Colored MAPF. Conflict-Based Min-Cost-Flow
(CBM) (Ma and Koenig, 2016) is based on algorithm
Conflict-Based Search (CBS) (Sharon et al., 2012).
Reduction-based methods using Boolean satisfiabil-
ity and integer linear programming formulation have
also been developed (Bart
´
ak et al., 2021).
The Connected Colored MAPF problem we in-
vestigate here is a variant of Colored MAPF, where
agents within individual groups must be kept together.
Connectivity was introduced in classical
MAPF (Queffelec et al., 2020). Communication
maintenance was also studied in the Area Protection
Problem (Ivanov
´
a et al., 2018), which can be viewed
as a MAPF with an adversarial element. Unlike in
Connected Colored MAPF, the agents in the Area
Protection Problem (Ivanov
´
a et al., 2018) are not
required to keep adjacent locations. Instead, they
need to remain within a defined communication
vicinity of each other, which allows them to distance
themselves up to a given diameter while obstacles are
not transparent. Connected Colored MAPF has never
been studied before, and we introduce the problem
here.
The paper is organized as follows. We will first
formally introduce the Connected Colored MAPF
Problem and discuss some of its properties. Then, we
will present the SAT model of the problem with two
possible encodings of the connectivity constraints. Fi-
nally, we will empirically evaluate the behavior of
the solver and present an application that allows the
demonstration of the results on real education robots.
2 FORMAL DEFINITION
Let A = {1, . . . , n} be a set of n agents and G = (V, E)
be an un-directed graph with vertices V and edges E.
Agents are initially staying at some vertices, which is
described by initial configuration S : A → V , where
S(a) is the initial position of agent a. The final con-
figuration is given by a set of vertices T ⊂ V such that
|T | = |A|.
Anonymous MAPF problem is given by a quadru-
ple (G, A, S, T ) and its solution is a set of collision-
free plans. A plan π
a
for an agent a is a sequence
of vertices such that π
a
[1] = S(a) and for each t ei-
ther π
a
[t] = π
a
[t + 1] (agent waits at a vertex) or
(π
a
[t], π
a
[t + 1]) ∈ E (agent moves to a neighboring
vertex). Let m
a
be the length of plan for agent a, then
we define π
a
[t] = π
a
[m
a
] for each t > m
a
(agents even-
tually stay in their final vertices). Note, however, that
if an agent reaches one of its targets at time t < m
a
, it
can still leave the target and perhaps give way to an-
other agent. Let M = max
a∈A
m
a
be a makespan of the
plans. We require agents to reach the final configura-
tion: ∀v ∈ T ∃a ∈ A : π
a
[M] = v, and the plans to be
collision free: ∀a
1
, a
2
∈ A, a
1
̸= a
2
, ∀t : π
a
1
[t] ̸= π
a
2
[t]
(no vertex collision) and ∀a
1
, a
2
∈ A, a
1
̸= a
2
, ∀t :
π
a
1
[t] ̸= π
a
2
[t + 1] ∨ π
a
1
[t + 1] ̸= π
a
2
[t] (no swapping
collision).
Colored MAPF (also known as Team MAPF
or TAPF) with k groups of agents is then
given as (G, (A
1
, S
1
, T
1
), . . . , (A
k
, S
k
, T
k
)), where each
(G, A
i
, S
i
, T
i
) is anonymous MAPF (Solovey and
Halperin, 2014). A solution of Colored MAPF is a
union of solutions of individual anonymous MAPF
problems such that the plans across the groups are
also collision-free.
Let V
ct
= {π
a
[t] : a ∈ A
c
} be the set of vertices
occupied by agents from A
c
at time step t. The
Connected Colored MAPF is a variant of Colored
MAPF that additionally requires the graph induced
by V
ct
to be connected at each time step t, i.e., ∀c ∈
{1, . . . , k}, ∀t : G[V
ct
] = (V
ct
, E
ct
) is connected.
3 PROBLEM PROPERTIES
Experimental evaluation of Colored MAPF reveals
that adding an agent and a target to an existing team
can, in fact, decrease the minimum makespan (Bart
´
ak
et al., 2021), contrary to the classic MAPF, in which
adding an agent never leads to an improvement of
minimum makespan. Intuitively, this can be ex-
plained by a new goal being placed in a more favor-
able position for a particular agent. This phenomenon
can occur in the Connected Colored MAPF problem
as well, as illustrated in Fig. 1. The instance on the left
has a minimum makespan of 9 because the agents are
forced to traverse in a train-like movement around the
obstacle to keep connected. When we add three more
agents and targets as depicted on the right, the mini-
mum makespan decreases to 5 as there is now enough
Coordinated Collision-free Movement of Groups of Agents
27
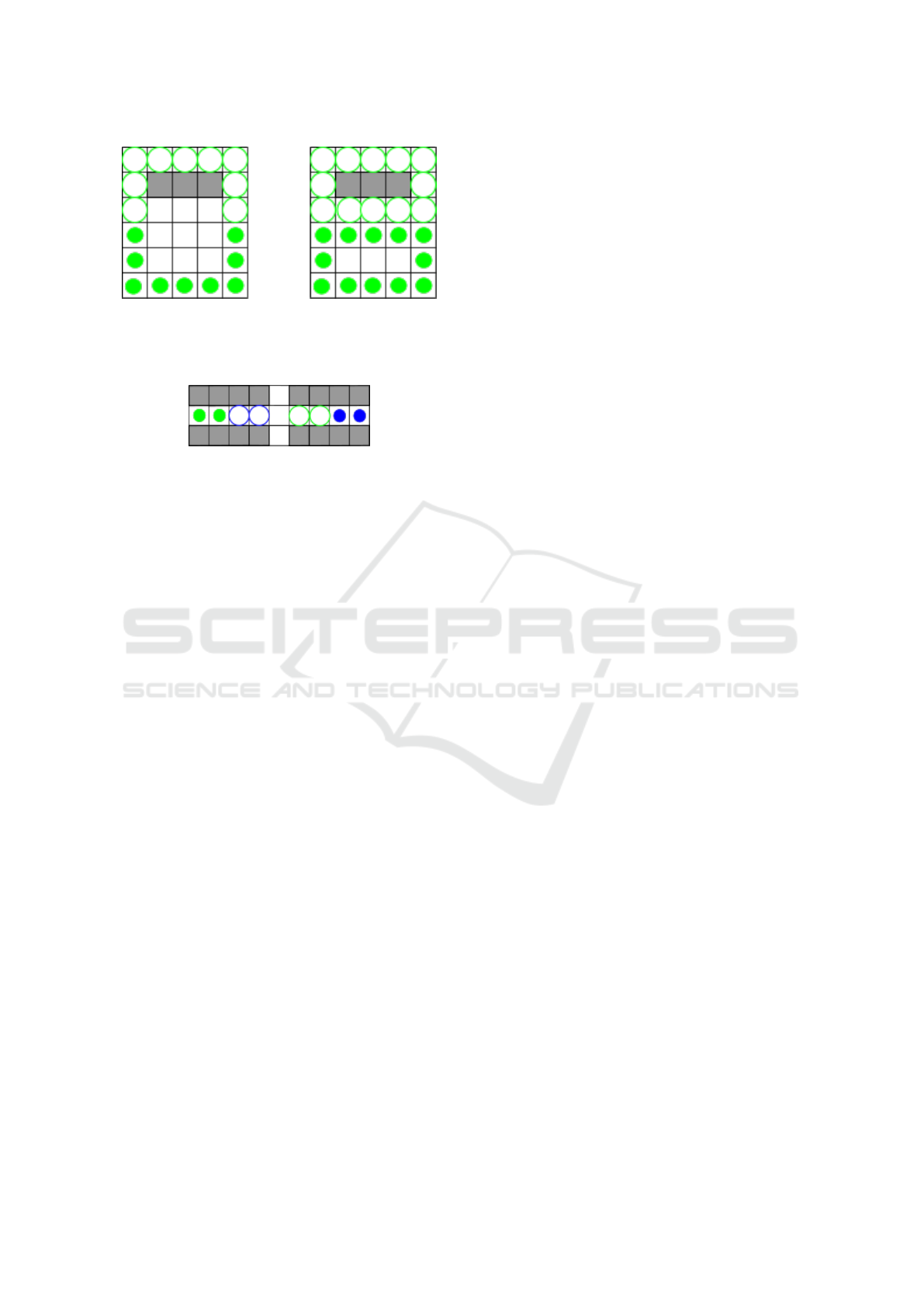
Figure 1: An example of how increasing the number of
agents can improve a makespan. Green and white circles
are agents of one team and their targets, respectively. Grey
blocks represent obstacles.
Figure 2: An instance of Colored MAPF for which there ex-
ists a solution. When connectivity is required, this instance
becomes unsolvable. The color of target matches the color
of agents.
agents to maintain connectivity: all agents make one
step up, and subsequently, all agents except the top
three in the middle make another four steps to fill
the target locations along the border. Note, however,
that the depicted instance is somewhat artificially de-
signed, and improvement of makespan rarely happens
in our experimental scenarios.
Figure 1, the instance on the left, is also an exam-
ple of an instance where the connectivity constraint
increases the optimal makespan. As was mentioned,
under the Connected Colored MAPF, this instance
has an optimal makespan of 9, while under Colored
MAPF, this instance is solvable with a makespan of
5, as the agents may disconnect and approach the tar-
gets from both sides.
Furthermore, adding the connectivity constraint
can cause an instance that would be solvable as a
Colored MAPF to become unsolvable as a Connected
Colored MAPF. It typically happens in crowded in-
stances when initial and target locations overlap, but
there are cases when there is no solution, even with
disjoint initial and target locations. An example of
such an instance can be seen in Figure 2. Indeed,
in Colored MAPF, a solution is for the green agents
to move out of the way to the very top and bot-
tom vertices to let the blue agents pass. Then, they
can navigate to their target positions. This solution
(or any other) is not possible under Connected Col-
ored MAPF since any solution requires either the two
green agents or the two blue agents to disconnect.
4 SOLUTION METHODS
Our approach to tackling Connected Colored MAPF
is to propose a Boolean satisfiability (SAT) formu-
lation that extends an existing model for Colored
MAPF (Bart
´
ak et al., 2021). This reduction-based
technique uses a spatial-temporal layered graph of a
certain number of layers in which the agents move.
Each layer of the graph corresponds to a single time
step. The layered graph is a directed acyclic graph,
and can be regarded as multiple copies of the orig-
inal graph with removed edges. Consecutive layers
are then connected by oriented edges that represent
a movement along an edge or staying at a vertex in
the original graph. Initially, the number of layers in
the spatial-temporal graph equals some lower bound
on the makespan. In the beginning, agents are placed
in the first layer at their initial locations. The SAT
solver then tries to find paths for each agent to a tar-
get associated with its team. If there is a solution,
it means the minimum makespan equals the current
number of layers. Otherwise, the number of available
layers increases by one, and the path-finding process
is repeated.
4.1 SAT Model for Colored MAPF
The existing SAT formulation of Colored MAPF uses
the following two sets of variables:
At(t, a, v) =
(
1 agent a is at node v at time step t,
0 otherwise,
Pass(t, a, v, u) =
(
1 a passes via arc (v, u) at time t,
0 otherwise,
and constraints on these variables imposing move-
ment rules and goal conditions in accordance with the
definition of Colored MAPF.
∀a ∈ ∪
k
c=1
A
c
: At(S(a), a, 0) = 1 (1a)
∀c ∈ {1, . . . k}, ∀a ∈ A
c
:
∑
v∈T
c
At(M, a, v) = 1 (1b)
∀v ∈ V, ∀t ∈ {0, . . . , M} :
∑
a∈∪
k
c=1
A
c
At(t, a, v) ≤ 1
(1c)
∀(v, u) ∈ E, ∀t ∈ {0, . . . , M − 1} :
∑
a∈∪
k
c=1
A
c
Pass(t, a, v, u) + Pass(t, a, u, v) ≤ 1 (1d)
∀v ∈ V, ∀a ∈ ∪
k
c=1
A
c
, ∀t ∈ {1, . . . , M} :
At(t, a, v) =
∑
(u,v)∈E
Pass(t −1, a, u, v) (1e)
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
28

∀v ∈ V, ∀a ∈ ∪
k
c=1
A
c
, ∀t ∈ {0, . . . , M − 1} :
At(t, a, v) =
∑
(v,u)∈E
Pass(t, a, v, u) (1f)
The constraints have the following interpretation:
1. Initial location of each agent is set (1a).
2. Each agent from a group c eventually arrives in
exactly one node in T
c
(1b).
3. Each node is occupied by at most one agent at a
time (avoidance of node collisions) (1c).
4. Two agents cannot pass through the same edge in
opposite directions at the same time (avoidance of
swapping collisions) (1d).
5. An agent is at a node if and only if it arrived
via an inbound edge, and left via an outbound
edge (waiting is enabled by the existence of
loops) (1e),(1f).
4.2 Multi-commodity Model for
Connectivity
The main idea that helps to coordinate the agents’
movement in a connected manner is based on
the multi-commodity network flow (MCF) problem.
Consider positions V
ct
of agents from each team A
c
at every time step t and the induced graph G[V
ct
].
We are looking for a MCF in each G[V
ct
]. Next, for
each team A
c
, let us select a representative agent a
c
whose location acts as a source of the MCF. The re-
maining agents’ locations are sinks for commodities
associated with the corresponding agents. Intuitively,
the flow of commodity associated with agent a passes
through some of the agents’ current locations and is
absorbed once it reaches the current position of a. The
existence of a MCF in each G
ct
ensures the existence
of a path from the source a
c
to every agent from A
c
,
and thus the connectivity of agents within one team.
We therefore extend the model by another set of
variables representing MCF. For each team c, time
step t, agent a ∈ A
c
and edge {u, v} ∈ E
ct
, there is
a variable f
ct
uva
such that
f
ct
uva
=
(
1 flow of agent a passes (u, v) at time t,
0 otherwise.
The variables are Boolean, and so the resulting as-
signment found by a SAT solver represents paths from
π
t
(a
c
) to π
t
(a) for each a ∈ A
c
. Additional constraints
are derived from a standard formulation of MCF.
∀c ∈ {1, . . . , k}, ∀a ∈ A
c
\ {a
c
},
∀t ∈ {1, . . . , M − 1}, u = π
a
c
[t] :
∑
(u,v)∈E
ct
f
ct
uva
= 1 (2a)
∀c ∈ {1, . . . , k}, ∀a ∈ A
c
\ {a
c
},
∀t ∈ {1, . . . , M − 1}, v ∈ V
ct
\ {π
a
[t], π
a
c
[t]} :
∑
(u,v)∈E
ct
f
ct
uva
=
∑
(v,u)∈E
ct
f
ct
vua
(2b)
∀c ∈ {1, . . . , k}, ∀a ∈ A
c
\ {a
c
},
∀t ∈ {1, . . . , M − 1}, v = π
a
[t] :
∑
(u,v)∈E
ct
f
ct
uva
= 1 (2c)
∀c ∈ {1, . . . , k}, ∀a ∈ A
c
\ {a
c
},
∀t ∈ {1, . . . , M − 1}, ∀(u, v) ∈ E
ct
, v ̸= π
a
c
[t], :
f
ct
uva
≤
∑
a∈A
c
At(t, a, v) (2d)
The sets of constraints (2a)-(2c) are flow conser-
vation constraints on sources π
a
c
, intermediate nodes
and sinks, respectively. By (2d) we then express the
relation between the variables. It is sufficient to de-
fine these flow constraints for time steps 1,. . . , M −1,
because the connectivity in initial and target config-
uration is already guaranteed by the admissibility of
tested instances. We shall refer to this model as an
MCF model.
Let us note that the induced graph G[V
ct
] is not
a part of the input, but changes dynamically as the
agents progress towards their target locations, i.e.,
sources and sinks change in each time step accord-
ing to the position of the corresponding agents. When
implementing, one has to keep in mind that the flow
constraints are conditional.
4.3 Single-commodity Model for
Connectivity
The previous model for connectivity treats each agent
in a group as a single commodity. This approach cre-
ates many variables since for each agent in a group,
we require a set of variables describing all of the
edges in the graph. An idea that may save some
variables treats a single group as a single commod-
ity and is based on a single commodity flow (SCF).
The drawback of this model is that the domain of
the variables is not a Boolean but rather a range in
{0, . . . , |A
c
|}. This is not natural for a SAT solver but
can be managed with a log-encoding of the variables.
We will describe the implementation details in a later
section.
We again extend the colored MAPF model by an-
other set of variables representing SCF. For each team
c, time step t, and edge {u, v} ∈ E
ct
, there is a vari-
able f
ct
uv
such that f
ct
uv
∈ {0, . . . , |A
c
|}. A representative
Coordinated Collision-free Movement of Groups of Agents
29
agent a
c
is again selected from each team A
c
to act as
the source of the flow. The following constraints im-
posing connectivity are added to the Colored MAPF
model (1a)-(1f):
∀c ∈ {1, . . . , k}, ∀t ∈ {1, . . . , M − 1}, u = π
a
c
[t] :
∑
(u,v)∈E
ct
f
ct
uv
= |A
c
| − 1 (3a)
∀c ∈ {1, . . . , k}, ∀t ∈ {1, . . . , M − 1},
v ∈ V
ct
\ {π
a
c
[t]} :
∑
(u,v)∈E
ct
f
ct
uv
= 1 +
∑
(v,u)∈E
ct
f
ct
vu
(3b)
∀c ∈ {1, . . . , k}, ∀t ∈ {1, . . . , M − 1}, ∀(u, v) ∈ E
ct
:
f
ct
uv
≤ |A
c
| ∗
∑
a∈A
c
At(t, a, v) (3c)
The sets of constraints (3a) and (3b) represent the
flow. The representative agent a
c
initiates a flow of
size |A
c
|−1, and every other agent consumes one unit
of the flow, and forwards the rest of the received flow
to its outgoing edges. By (3c) we then express the
relation between the flow variables and the variables
modeling the presence of an agent at a node. We shall
refer to this model as an SCF model.
The reasoning why this is sufficient to model
agents’ connectivity is as follows. Consider a flow
network created from the induced graph G[V
ct
] by
adding a source connected to the location of a
c
with
a capacity of |A
c
| and a sink connected to each of the
vertices in V
ct
with a capacity of 1. The maximum
flow will be equal to |A
c
| only if the graph G[V
ct
] is
connected. This network is equivalent to the proposed
SCF model, but rather than adding a source and a sink,
we generate the flow at the positions of a
c
and each
agent consumes a flow of size one. The name of the
model reflects this reasoning.
5 EXPERIMENTAL EVALUATION
In order to assess the performance of the proposed
model, we conducted numerical experiments on sce-
narios suitable for the studied problem. In the follow-
ing, we provide a detailed explanation that facilitates
the reproducibility of the tests.
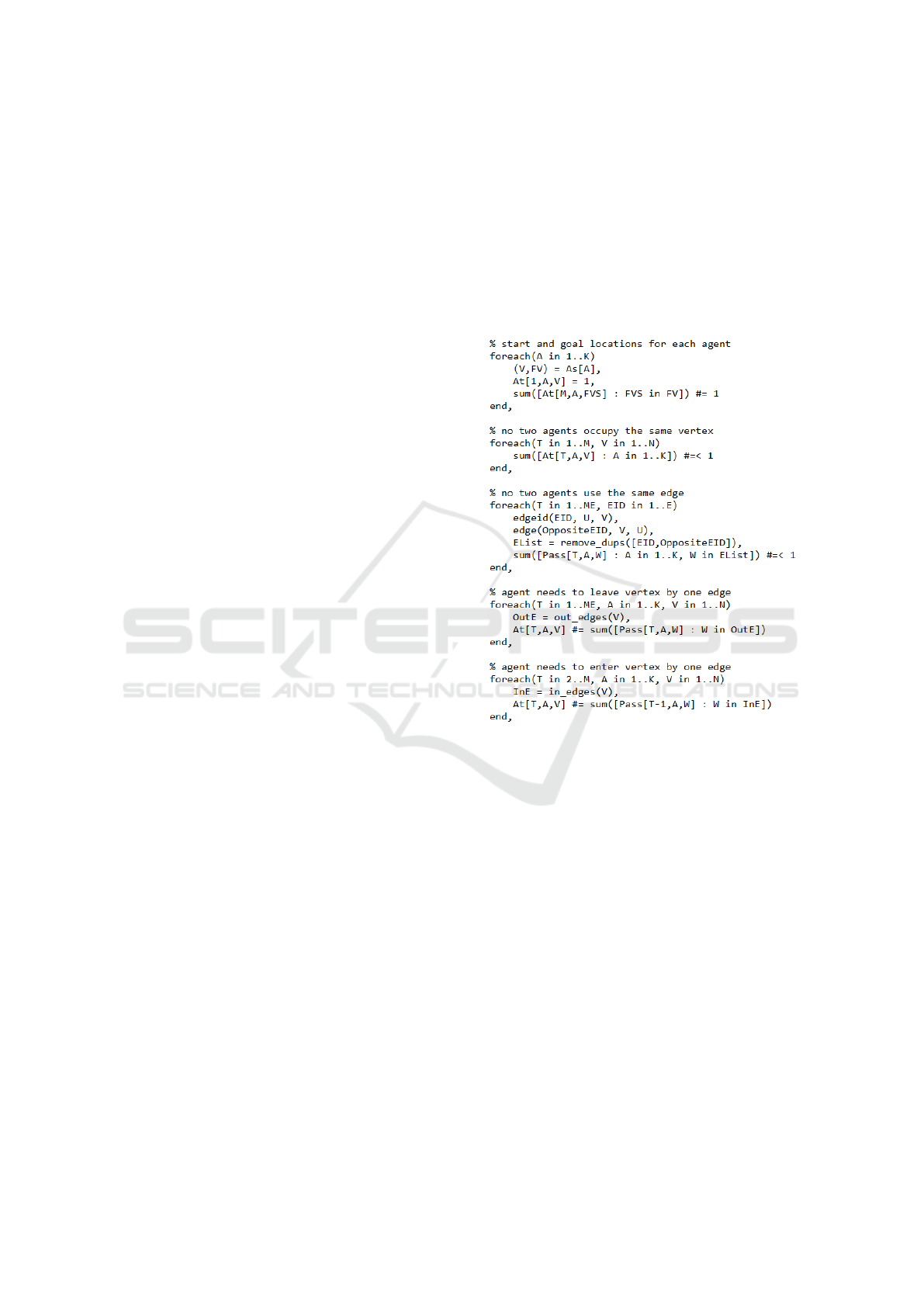
5.1 Implementation
The described model has been implemented using
the Picat programming language (Picat language and
compiler version 2.7b7), which is a logic-based pro-
gramming language similar to Prolog. The main ad-
vantage, and the reason this tool was used, is that the
constraints are easily represented and then automati-
cally translated to a propositional formula. See Figure
3 for a snipped of Picat code that models the Colored
MAPF. Adding constraints in Figure 4 or in Figure 5
creates a model for Connected Colored MAPF. Notice
the similarity between constraints (2a) – (2d), (3a) –
(3c) and the code itself.
Figure 3: A snippet of Picat code. These constraints model
the Colored MAPF problem for a given makespan M.
5.2 Instances
To test the implemented model, we create random
grid instances inspired by the benchmarks often used
in classical MAPF setting (Stern et al., 2019). We
pick three different sizes: 8 by 8, 16 by 16, and 32 by
32. For each size, we consider two options, either no
obstacles are present at all (maps empty) or 20% of
random vertices are marked as an impassable obsta-
cle (maps random). The number of agents in a single
team is fixed at 5 and 10. The number of teams in-
creases from 1 to a point so that the total number of
agents present in the graph is 100 (40 in the case of
the grids of size 8 by 8). The start and goal locations
of agents are placed randomly in such a way that the
start and goal locations of a single team always form a
connected graph. However, note that based on the ex-
ample in Figure 2 this does not necessarily guarantee
that the instance has a solution. Each of the settings is
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
30
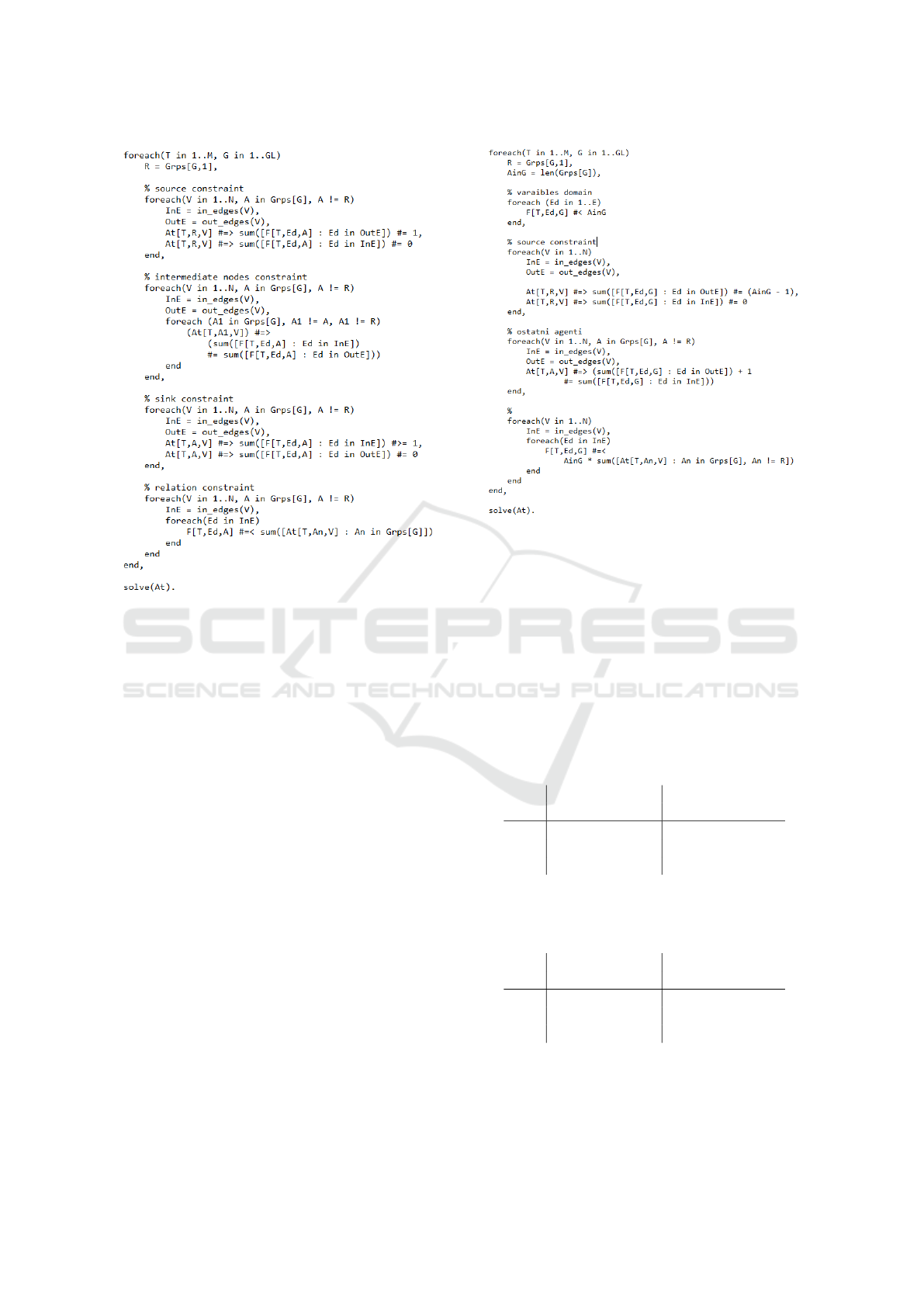
Figure 4: A snippet of Picat code. Adding these constraints
to the ones from Figure 3 model the Connected Colored
MAPF via the MCF model.
created 5 times. This gives us a total of 720 instances.
5.3 Results
Each of the created instances was run on a PC with an
AMD Ryzen 7 4700U CPU running at 2.00 GHz with
16 GB of RAM. We used a time limit of 300 seconds
per problem instance.
First, we compare the two models for navigating
agents in a connected manner. The ratio of solved in-
stances in the given time limit is shown in Table 1 for
the MCF model and in Table 2 for the SCF model. We
split the results based on the size of the grid, the num-
ber of agents present in a single team, and whether
there are obstacles present in the grid. Based on the
presented results it can be clearly seen that the MCF
model outperforms the SCF model in all of the set-
tings. Furthermore, with the increasing size of the
grid, the problem becomes much harder. Only around
10% of instances on the largest grids are solved by
the MCF model and these correspond to the instances
with the least number of agents. The best perfor-
mance is achieved in the smallest grids. Both adding
obstacles and increasing the number of agents per
team negatively influence the success ratio. The rea-
Figure 5: A snippet of Picat code. Adding these constraints
to the ones from Figure 3 model the Connected Colored
MAPF via the SCF model.
soning behind these results is that with the increasing
size of the grid and the number of agents, the number
of variables entering the solver increase as well. Fur-
thermore, on larger grids, the average traveling dis-
tance also increases which further increases the num-
ber of variables. The traveling distance also increases
when obstacles are present.
Table 1: The ratio of instances that were solved within a
given time limit divided by the number of agents per one
team and by the grid type. Results for MCF model.
agents per team grid type
size 5 10 empty random
8 0.85 0.65 0.9 0.66
16 0.37 0.14 0.34 0.25
32 0.14 0.1 0.13 0.12
Table 2: The ratio of instances that were solved within a
given time limit divided by the number of agents per one
team and by the grid type. Results for SCF model.
agents per team grid type
size 5 10 empty random
8 0.62 0.31 0.53 0.5
16 0.14 0.06 0.12 0.11
32 0.09 0.02 0.05 0.07
We further investigate the instances on grids 8 by
8 with obstacles, since they seem to provide the most
interesting results. Comparison of runtimes of Con-
nected Colored MAPF via MCF and SCF, and Col-
Coordinated Collision-free Movement of Groups of Agents
31
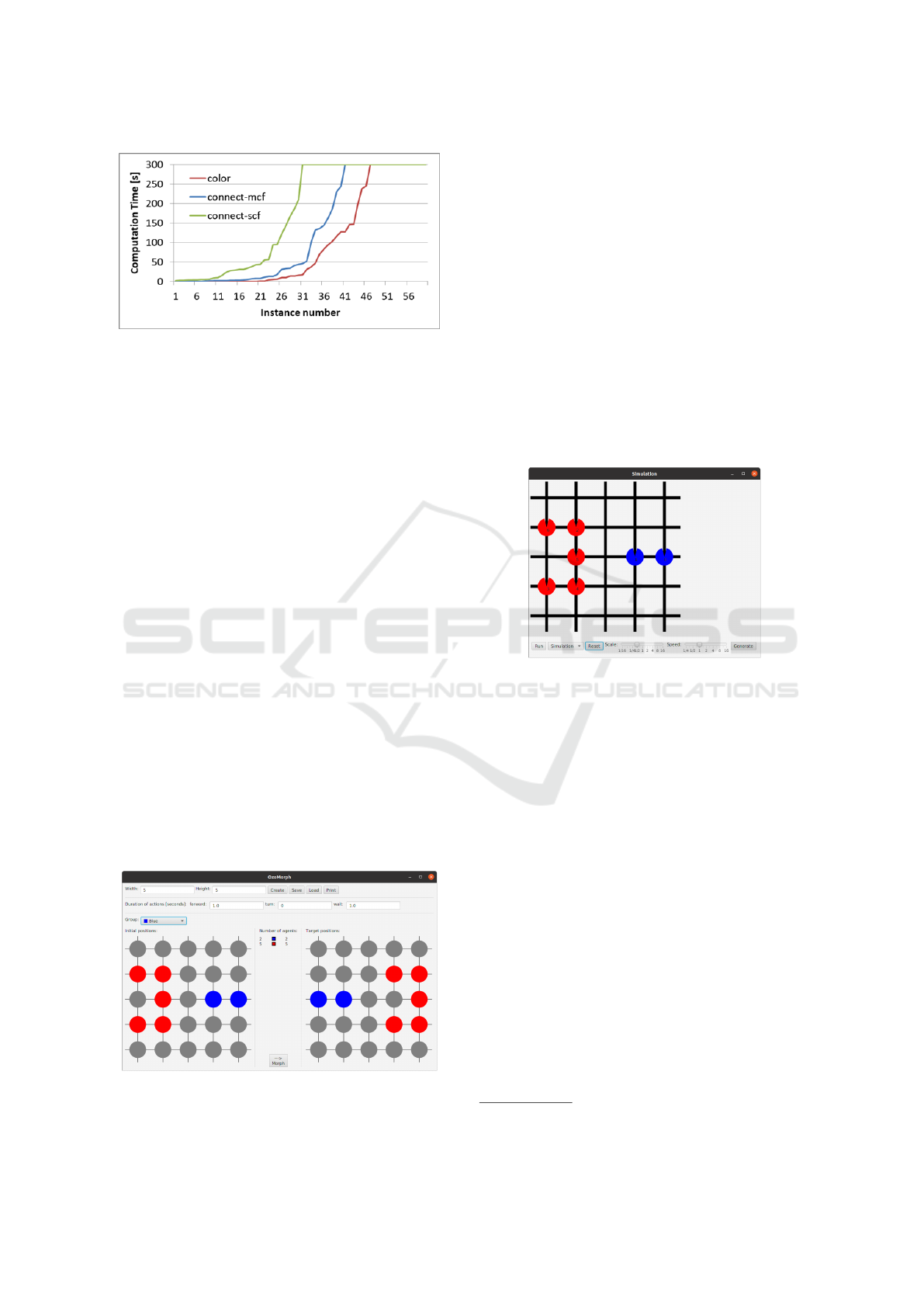
Figure 6: Comparison of runtime of Connected Colored
MAPF and Colored MAPF on the same instances.
ored MAPF is shown in Figure 6. The instances
are ordered by their runtime, on the x-axis is shown
the instance number and on the y-axis, the runtime
is shown. This graph represents the number of in-
stances solvable in a given time limit. The lower the
line, the better. We can clearly see that the Colored
MAPF is easier to solve. This is caused only by the
added constraints and not by an increase in makespan
in which the instance is solvable (recall that adding
the connectivity requirement can cause the makespan
to increase). The case that the makespan increased
occurred only in 6 cases out of 60 instances and each
time the makespan increased by 1.
6 PRACTICAL
DEMONSTRATION
To visualize the proposed algorithm, we created a
software OzoMorph that allows the user to build a
(Connected) Colored MAPF instance, solve it with a
provided solver, see a simulation of the solution, and
even produce a code that is executable on a real robot
Ozobot. The application is written in Java so that it
can run on various platforms.
Figure 7: The user interface of OzoMorph that allows its
user to create and solve an instance of Connected Colored
MAPF.
The user interface is shown in Figure 7. First,
the user can specify the dimensions of the underly-
ing grid graph. We are working with grid graphs as
it is the most common in MAPF instances and the
easiest to apply to real robots. The user also has
the option to print the defined graph on paper. Then,
choosing a color and clicking on vertices on the left-
hand side, the initial locations for that color (team) are
chosen. Similarly, by clicking on the vertices on the
right-hand side, the target locations are chosen. The
software automatically checks whether the instance
is consistent. By clicking on the Morph button, the
software creates an instance for the solver and runs
the solver. We use the solver described in the previ-
ous section; however, the users can provide their own
solver given that the input and output formats are the
same.
Figure 8: Simulation window of the OzoMorph software.
If the instance has a solution, the simulation win-
dow (see Figure 8) pops up. The simulation aims to
show the actual continuous positions of real robots
that would execute the given instance instead of
the sequence of vertices produced by the theoretical
model (Bart
´
ak et al., 2019). The properties (moving
and turning speeds) can be adjusted in the main user
interface of OzoMorph. Videos of the instance de-
fined in Figure 7 solved in both Connected Colored
and Colored way can be found at a repository together
with the source codes and experimental data from the
previous section
1
.
If desired, the found plan can be exported into a
file that can be uploaded into Ozobot robots (Evol-
lve, Inc., 2018). An instance of Connected Colored
MAPF executed on Ozobots is shown in Figure 9.
The size of the grid in the simulation window is ad-
justable, so the execution of the robots can be done on
a flat screen or tablet rather than on a printed grid to
verify that the simulation corresponds to reality.
1
https://github.com/svancaj/Connected-colored-MAPF
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
32

Figure 9: An instance of Connected Colored MAPF run on
robots Ozobot (Evollve, Inc., 2018).
7 DISCUSSION AND FUTURE
WORK
The additional requirement for connectivity makes
the Colored MAPF problem significantly more chal-
lenging for designing efficient declarative models.
Our formulation is proper on relatively small in-
stances, which we demonstrated with real physical
robots Ozobots. The solution time for large instances
becomes prohibitively long, which suggests substan-
tial room for improvement of the model. Another op-
tion of potential future research is to develop both op-
timal and inexact imperative algorithms. The adap-
tation of the existing CBM algorithm that solves
Colored MAPF to solve Connected Colored MAPF
seems complicated, as repairing conflicts arising from
unsatisfied connectivity within a group would lead to
substantial branching factors.
There is a natural generalization of Connected
Colored MAPF, in which the agents do not need to
be adjacent to each other but need to keep within a
vicinity given by a defined distance. In our case, we
considered this distance to be 1, but this can be gen-
eralized to any value.
ACKNOWLEDGMENTS
This research is supported by the Czech-USA Co-
operative Scientific Research Project LTAUSA19072
and by the project 19-02183S of the Czech Science
Foundation.
REFERENCES
Bart
´
ak, R.,
ˇ
Svancara, J.,
ˇ
Skopkov
´
a, V., Nohejl, D., and
Krasi
ˇ
cenko, I. (2019). Multi-agent path finding on real
robots. AI Communications, 32(3):175–189.
Bart
´
ak, R., Ivanov
´
a, M., and
ˇ
Svancara, J. (2021). Colored
multi-agent path finding: Solving approaches. The In-
ternational FLAIRS Conference Proceedings, 34.
Evollve, Inc. (2018). Ozobot — Robots to code, create, and
connect with. Accessed Nov. 20, 2020.
Ivanov
´
a, M., Surynek, P., and Nguyen, D. T. N. (2018).
Maintaining ad-hoc communication network in area
protection scenarios with adversarial agents. In
Brawner, K. and Rus, V., editors, Proceedings of
the Thirty-First International Florida Artificial Intel-
ligence Research Society Conference, FLAIRS 2018,
Melbourne, Florida, USA. May 21-23 2018, pages
348–353. AAAI Press.
Li, L., Sheng, W., and Hu, C. (2020). Research on forma-
tion keeping of multi-rotor UAVs based on improved
virtual structure method. Journal of Physics: Confer-
ence Series, 1631:012106.
Ma, H. and Koenig, S. (2016). Optimal target assignment
and path finding for teams of agents. In Proceedings
of the 2016 International Conference on Autonomous
Agents & Multiagent Systems, Singapore, May 9-13,
2016, pages 1144–1152.
Ma, H., Yang, J., Cohen, L., Kumar, T. K. S., and Koenig, S.
(2017). Feasibility study: Moving non-homogeneous
teams in congested video game environments. In
Magerko, B. and Rowe, J. P., editors, Proceedings of
the Thirteenth AAAI Conference on Artificial Intelli-
gence and Interactive Digital Entertainment (AIIDE-
17), October 5-9, 2017, Snowbird, Little Cottonwood
Canyon, Utah, USA, pages 270–272. AAAI Press.
Queffelec, A., Sankur, O., and Schwarzentruber, F. (2020).
Conflict-Based Search for Connected Multi-Agent
Path Finding. arXiv e-prints, page arXiv:2006.03280.
Ratner, D. and Warmuth, M. K. (1990). Nxn puzzle
and related relocation problem. J. Symb. Comput.,
10(2):111–138.
Sharon, G., Stern, R., Felner, A., and Sturtevant, N. R.
(2012). Conflict-based search for optimal multi-agent
path finding. In Hoffmann, J. and Selman, B., editors,
Proceedings of the Twenty-Sixth AAAI Conference on
Artificial Intelligence, July 22-26, 2012, Toronto, On-
tario, Canada. AAAI Press.
Solovey, K. and Halperin, D. (2014). k-color multi-robot
motion planning. I. J. Robotics Res., 33(1):82–97.
Stern, R., Sturtevant, N. R., Felner, A., Koenig, S., Ma, H.,
Walker, T. T., Li, J., Atzmon, D., Cohen, L., Kumar,
T. K. S., Bart
´
ak, R., and Boyarski, E. (2019). Multi-
agent pathfinding: Definitions, variants, and bench-
marks. In Proceedings of the Twelfth International
Symposium on Combinatorial Search, SOCS 2019,
Napa, California, 16-17 July 2019, pages 151–159.
Surynek, P. (2010). An optimization variant of multi-robot
path planning is intractable. In Proceedings of the
Twenty-Fourth AAAI Conference on Artificial Intelli-
gence, AAAI 2010, Atlanta, Georgia, USA, July 11-15,
2010.
Yu, J. and LaValle, S. M. (2012). Multi-agent path plan-
ning and network flow. In Algorithmic Foundations
of Robotics X - Proceedings of the Tenth Workshop on
the Algorithmic Foundations of Robotics, WAFR 2012,
2012, pages 157–173.
Coordinated Collision-free Movement of Groups of Agents
33
