
Unsupervised Learning of State Representation using Balanced View
Spatial Deep InfoMax: Evaluation on Atari Games
Menore Tekeba Mengistu
1,2
, Getachew Alemu
1
, Pierre Chevaillier
2
and Pierre De Loor
2
1
School of Electrical and Computer Engineering, Addis Ababa University, King George VI Street, Addis Ababa, Ethiopia
2
Lab-STICC, UMR CNRS 6285, ENIB, France
Keywords:
Unsupervised Learning, Autonomous Agents, State Representation Learning, Contrastive Learning,
Atari Games.
Abstract:
In this paper, we present an unsupervised state representation learning of spatio-temporally evolving sequences
of autonomous agents’ observations. Our method uses contrastive learning through mutual information (MI)
maximization between a sample and the views derived through selection of pixels from the sample and other
randomly selected negative samples. Our method employs balancing MI by finding the optimal ratios of
positive-to-negative pixels in these derived (constructed) views. We performed several experiments and de-
termined the optimal ratios of positive-to-negative signals to balance the MI between a given sample and the
constructed views. The newly introduced method is named as Balanced View Spatial Deep InfoMax (BVS-
DIM). We evaluated our method on Atari games and performed comparisons with the state-of-the-art unsuper-
vised state representation learning baseline method. We show that our solution enables to successfully learn
state representations from sparsely sampled or randomly shuffled observations. Our BVS-DIM method also
marginally enhances the representation powers of encoders to capture high-level latent factors of the agents’
observations when compared with the baseline method.
1 INTRODUCTION
Self learning of sensory data are considered as a fun-
damental cognitive capability of animals and spe-
cially humans (Marr, 1982; Gordon and Irwin, 1996).
Therefore, it is important to endow autonomous artifi-
cial agents with such cognitive capability (Nair et al.,
2018; Lake et al., 2017). Currently, it is possible
to train a model through supervised learning, from
raw sensory data with machine learning architectures
(Khan et al., 2020). However, this raises some diffi-
culties: the need of huge databases that must be la-
belled (Russakovsky et al., 2015), the time required
to train the model but more fundamentally, the differ-
ence with the way living beings are able to learn by
themselves to recognize shapes, without the need of
million of annotated samples. Consequently, some re-
searchers have adopted another way, closer to natural
or psychological observations. For instance (Forestier
et al., 2017; P
´
er
´
e et al., 2018) used intrinsically mo-
tivated exploration and unsupervised learning princi-
ples to give an agent the capability to acquire new
knowledge and skills. The key principle of unsuper-
vised learning is to compare different perceptions of a
same context and to find out what distinguishes them
(Bachman et al., 2019; Oord et al., 2018). However,
modeling high-level representation from raw sensory
data through unsupervised learning remains challeng-
ing and is far to be as efficient as supervised learning.
To compare algorithms, benchmark based on
Atari 2600 games (Bellemare et al., 2013) are gener-
ally used because they endow state variables (location
of the player, location of different items, etc.) which
are generative factors of the images. This state vari-
ables are representations accessible from the source
code of the game and can be learned. Moreover, there
are several Atari games of diverse natures and number
of state variables with varied conditions of the envi-
ronment. Thus it allows to collect enough samples
for each game and to carry out evaluations across sev-
eral games to assess the generalization capability of
the learning method. For this task, and to our knowl-
edge, the Spatio-Temporal Deep InfoMax (ST-DIM)
(Anand et al., 2019) is the state-of-the-art baseline.
In this work, we have introduced a new ap-
proach for unsupervised state representation learning
of spatio-temporally evolving data sequences based
on maximizing contrastive Mutual Information (MI).
110
Mengistu, M., Alemu, G., Chevaillier, P. and De Loor, P.
Unsupervised Learning of State Representation using Balanced View Spatial Deep InfoMax: Evaluation on Atari Games.
DOI: 10.5220/0010785000003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 2, pages 110-119
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Our method is known as Balanced View Spatial Deep-
InfoMax (BVS-DIM). The learning of BVS-DIM de-
pends on maximizing MI between the whole fea-
tures of an image and the features of the patches of
its views; and maximizing MI between the features
of the patches of the image and the corresponding
patches of its views. Since these MI maximization
correspondences of the global and local features is
in spatial axes, we used the term ”Spatial”. We bal-
ance the ratio of pixels taken from the sample itself
and from other samples in the constructed views and
hence, we used the term ”Balanced View”.
Our method is proposed to enable autonomous
agents’ unsupervised learning from sparsely or irreg-
ularly sampled observations or observations with no
time stamp at all. As discussed in section 3, these
scenarios of learning are unaddressed by ST-DIM,
which success strongly depends on consecutive time
step samples with high sampling rates.
In section 2, we discussed the related works and in
section 3 we presented the motivation of this research
work. Then in section 4, we detailed our method,
BVS-DIM. In section 5, we described the experimen-
tal settings. Then in section 6, it is our results and
discussion section. We compared our results with the
state-of-the-art ST-DIM method and other methods
with different ways to create positive views. In con-
clusion (section 7), we show how BVS-DIM achieved
the objectives we set in section 3 with performances
exceeding the baseline.
2 RELATED WORKS
In state representation learning, current unsupervised
methods use three approaches: generative decoding
of the data using Variational Auto Encoders (VAEs),
generative decoding of the data using prediction in
pixel-space (prediction of future frames in videos and
video games (Oh et al., 2015)) and scalable estimation
of mutual information (MI) between the input and the
output. The scalability of the MI based representation
is both in dimensions, sample size and with a char-
acteristic of achieving good performance in different
settings (Belghazi et al., 2018). However, the gen-
erative models using VAEs or predictive pixels tend
to capture pixel level details rather than abstract la-
tent factors. The generative decoding aims in recon-
structing the input image with pixel level reconstruc-
tion accuracy (Kingma and Welling, 2013; Sønderby
et al., 2016). On the other hand, representation learn-
ing based on maximizing MI focuses on enhancing
MI either between representations of different views
of the same sample or between an input and its repre-
sentation. This objective of maximizing MI helps to
learn semantically meaningful and interpretable (dis-
entangled) representations (Chen et al., 2016) and en-
ables to have better representation of a given sample’s
overall feature rather than local and low-level details.
Unsupervised Representation Learning: Recent
works on unsupervised representation learning extract
latent representations by maximizing a lower bound
on the mutual information between the representation
and the input. DIM (Hjelm et al., 2019) performs
unsupervised learning of representations by maximiz-
ing the Jensen-Shannon (JD) divergence between the
joint and product of marginals of an image and its
patches. DIM’s representation learning also works
well with loss based on Noise Contrastive Estimation
(InfoNCE) (Oord et al., 2018) and Mutual Informa-
tion Neural Estimation (MINE) (Belghazi et al., 2018)
in addition to JD. Another similar work with DIM
(Bachman et al., 2019) uses representations learned
through maximizing the MI between a given image
and its augmented views. See (Poole et al., 2019)
and (Anand et al., 2019) for more details on repre-
sentation learning through MI maximization between
inputs and outputs.
State Representation Learning: Learning state
representations is an active area of research within
robotics and reinforcement learning (Nair et al., 2018;
P
´
er
´
e et al., 2018). Most existing state representation
learning methods are based on handcrafted features
and/or through supervised training using labelled data
(Jonschkowski and Brock, 2015; Jonschkowski et al.,
2017; Lesort et al., 2018). However, agents and robots
can’t learn from new observations when they are ex-
posed to new and unseen environments. Therefore,
most recent unsupervised state representations were
introduced like TCN (Sermanet et al., 2018), TDC
(Ma and Collins, 2018) and more recently, ST-DIM
(Anand et al., 2019), which is the state-of-the-art
baseline to our BVS-DIM method. Our BVS-DIM is
also based on DIM (Hjelm et al., 2019). ST-DIM used
Atari games for evaluating their learning of state rep-
resentations. The state variables of the Atari games
are the controllers of the game dynamics and the de-
tails of these state variables are provided in (Anand
et al., 2019).
Our work is closely related to DIM (Hjelm et al.,
2019), AMDIM (Bachman et al., 2019) and ST-DIM
(Anand et al., 2019) even though the first two are gen-
eral purpose representation learning methods tested
on real-world data-sets such as ImageNet (Deng et al.,
2009).
Unsupervised Learning of State Representation using Balanced View Spatial Deep InfoMax: Evaluation on Atari Games
111

3 MOTIVATION
An autonomous agent should be capable of learning
in an unsupervised way. ST-DIM is an unsupervised
state representation learning from visual observations.
However, the learning method of ST-DIM depends on
the consecutive time step visual observations (Anand
et al., 2019). Hence ST-DIM has the following limi-
tations.
1. Sampling Rate: The learning of ST-DIM only
depends on the consecutive time samples. These
consecutive samples are similar with each-other
due to high sampling rates and one can be con-
sidered as the view of the other. Agents may have
sparse sampling rates and may not collect samples
frequently. In this case, consecutive time samples
wouldn’t be similar and hence, the ST-DIM ap-
proach can’t be appropriate enough to capture the
latent generative factors of the environment.
2. Selective Sample Collection: Autonomous
learning from a one time collected dataset makes
the autonomous agent limited to the environment
from which the samples are collected. To extend
the learning across longer time and diverse envi-
ronments, agents may learn while they are collect-
ing samples and make replacements of samples
with new relevant experiences using some selec-
tion criteria when their memory is full. In this
case, the collected datasets won’t be consecutive
time step; the sampling frequency won’t be uni-
form, or it may not have a time-stamp at all. In
such types of scenarios, ST-DIM approach can’t
be employed for the learning as it depends on the
similarity of consecutive samples.
To overcome these limitations, we proposed BVS-
DIM in which autonomous agents can learn from
data samples with randomly shuffled order, sparsely
sampled from the environment or time-consecutive as
well. Our BVS-DIM method is inspired by different
biological and computational research findings and
combined them to create a better state representation
learning method. We adopted the concept of hard-
mixture of features from (Kalantidis et al., 2020), the
concept of both positive and negative samples for bet-
ter learning from (Carlson et al., 2014) and (Visani
et al., 2020), the concept of contrastive relations of a
pixel in a given image to the pixels of the entire im-
ages in the data-set from (Wang et al., 2021) and the
concept of data augmentation from (Bachman et al.,
2019). We created constructed views of a given sam-
ple by selecting pixels from itself (positive signals)
and pixels from another sample randomly selected
from the same mini-batch (negative signals). We used
MI maximization between learned representations of
a sample and its constructed views.
The objective of our BVS-DIM method is to learn
features with latent factors of the agents’ observation
even under the absence of significant similarity be-
tween time consecutive samples or randomly shuf-
fled samples of autonomous agents. It enables the
autonomous agent to capture every spatially evolv-
ing factor including controllable ones and the envi-
ronment such as state variables. We have made the
following contributions.
1. We devised a new unsupervised state represen-
tation learning method that can learn from sam-
ples collected by autonomous agents regardless of
their chronological order and sampling rate.
2. We achieved marginally better result when com-
pared to ST-DIM, the state of the art baseline
method, both for time-consecutive and randomly
shuffled collected samples.
4 BALANCED VIEW SPATIAL
DEEP INFOMAX
The core idea of our BVS-DIM method is in creat-
ing balanced views of a given sample using selec-
tion methods of pixels from itself and pixels from
other randomly selected sample of the same mini-
batch. Balanced view is created through selection
of the ratio of positive-to-negative signals in the con-
structed view. Our method extends the state represen-
tation power of spatio-temporally evolving sequences
of data by letting the encoder capture the discrimi-
native features from the mixed positive and negative
signals exploiting both similarity and contrast in a sin-
gle constructed view of a given sample. Here after
we used ”positive sample” to refer to a given anchor
sample itself, ”negative sample” to refer to any other
sample randomly drawn from the same mini-batch.
We assumed a setting where an agent interacts
with its environment and observes high-dimensional
observations across several episodes and we formed
two sample sets from these episodes. The first set
of observations preserving their temporal ordering
is given as χ = {x
1
, x
2
, x
3
, ..., x
N
}. The second set
of observations being randomly shuffled is given as
χ
′
= {x
′
1
, x
′
2
, x
′
3
, ..., x
′
M
}.
Taking the advantage of the success of ST-DIM,
where the frames of consecutive time-steps x
t
and
x
t+1
are similar with each other, these consecutive
frames are taken as the view of one another. How-
ever, learning in ST-DIM is limited to time sequenced
samples, and we hypothesize the success of state rep-
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
112

resentation learning in ST-DIM depends on the sim-
ilarity factor of consecutive observations. When the
sampling rates of the observations are more frequent,
the consecutive frames will have high similarity and
vice-versa. Let us assume that we have a positive an-
chor sample x
p
and two other randomly selected neg-
ative samples x
∗
1
and x
∗
2
uniformly sampled from χ or
χ
′
. We shall construct two positive views x
min
and
x
max
from (x
p
, x
∗
1
) and (x
p
, x
∗
2
) pairs using the fol-
lowing simple min and max pixel-wise operations, re-
spectively.
x
min
(i, j) := min(x
p
(i, j), x
∗
1
(i, j)) (1)
x
max
(i, j) := max(x
p
(i, j), x
∗
2
(i, j)) (2)
The positive sample probably has 50% signal con-
tribution in x
min
and x
max
constructed views. How-
ever, the balancing ratios in the newly constructed
views affect the representation learning performance.
Our prime purpose is to balance the ratio of positive-
to-negative signals in these constructed views. Let
p represent the probability of assigning the pixel
of x
bmn
and x
bmx
from pixels of x
p
modifying con-
structed views of x
min
and x
max
. To increase the ra-
tio of positive-to-negative signals from 0.5 to some
r where r > 0.5, we shall assign the value of p as
p = 2 ∗ (r − 0.5). Then the new finally modified con-
structed views x
bmn
and x
bmx
is given by equations
4 and 5, respectively. Let R be an array of normal
(Gaussian) distribution with center p in range [0, 1]
and C be a Boolean array. Both R and C have the
same dimension as x
p
and equation 3 initializes the
Boolean array C.
C
i, j
:=
true
if R
i, j
< p
f alse
otherwise
(3)
x
bmn
(i, j) :=
x
p
(i, j)
if C
i, j
= true
x
min
(i, j)
otherwise
(4)
x
bmx
(i, j) :=
x
p
(i, j)
if C
i, j
= true
x
max
(i, j)
otherwise
(5)
4.1 Maximizing Mutual Information
across Balanced Views
Similar to ST-DIM, we used two types of MI esti-
mations. The first is global-to-local (GL) where the
MI between the global (whole) features of a sample
and the features of local patches of its views are com-
puted. The second one is local-to-local (LL) where
the MI between the features of local patches of the
sample and its corresponding views are estimated.
The combination of these two MI estimations is de-
noted as GL-LL. Therefore, our BVS-DIM is used
with either the GL-LL or GL-only MI objective for
both time-sequenced and randomly selected tuples of
samples. Then we used MI maximization function
between a sample and its constructed views to en-
hance representation learning. We hypothesize that
such enhancement of representation learning is possi-
ble through balancing the ratio of positive-to-negative
signals in the constructed views.
For a given MI estimator, we used the GL objec-
tive in equation 7 to maximize the MI between global
features of x
p
and features of small patches of x
bmn
and x
bmx
. The Local-Local (LL) objective in equa-
tion 8 maximizes MI between the local feature of x
p
with the corresponding local feature of x
bmn
and x
bmx
.
The LL MI objective is used in combination with GL
MI objective as GL-LL. The views, x
bmn
and x
bmx
, are
constructed as mixed pixels from the positive sample
x
p
and two negative samples, (x
∗
1
or x
∗
2
which are se-
lected in a uniformly random way as given in equa-
tions 1 through 5). We have used the GL MI objective
alone as well as the combined GL-LL MI objective in
our tests. Figure 1 represents a visual depiction of our
model, BVS-DIM.
We used InfoNCE (Oord et al., 2018) as MI es-
timator, a multi-sample variant of noise-contrastive
estimation (NCE) (Gutmann and Hyv
¨
arinen, 2010).
This MI estimator worked well with DIM and ST-
DIM along with GL and GL-LL objectives, respec-
tively. Let {(x
i
, y
i
)}
N
i=1
be a paired dataset of N sam-
ples from some joint distribution p(x, y). We consider
any sample i of (x
i
, y
i
) from this joint p(x, y) are the
positive sample pairs and any i ̸= j of (x
i
, y
j
) are neg-
ative sample pairs. InfoNCE objective uses a score
function f (x, y) which assigns larger values to posi-
tive sample pairs and smaller values to negative sam-
ple pairs by maximizing equation 6 as discussed in
details on (Oord et al., 2018) and (Poole et al., 2019).
I
NCE
({(x
i
, y
i
)}
N
i=1
) =
N
∑
i=1
log
exp( f (x
i
, y
i
))
∑
N
j=1
exp( f (x
i
, y
j
))
(6)
The MI objective function given in equation 6 has
also been referred to as multi-class n-pair loss (Sohn,
2016), (Sermanet et al., 2018), ranking-based NCE
(Ma and Collins, 2018) and is similar to MINE (Bel-
ghazi et al., 2018) and the JSD-variant of DIM (Hjelm
et al., 2019).
For fair comparison of our model with ST-DIM,
we have used a bilinear model W for the score func-
tion f (x, y) = ψ(x)
T
W ψ(y), where ψ is our represen-
tation encoder. The bi-linear model in combination
with InfoNCE enables the encoder to learn linearly
predictable representations and helps in learning rep-
resentations at the semantic level (Anand et al., 2019).
Let X
b
= {(x
p
, x
∗
1
, x
∗
2
}
B
i=1
be a mini-batch of ran-
domly selected tuples of samples from χ
′
. We con-
Unsupervised Learning of State Representation using Balanced View Spatial Deep InfoMax: Evaluation on Atari Games
113
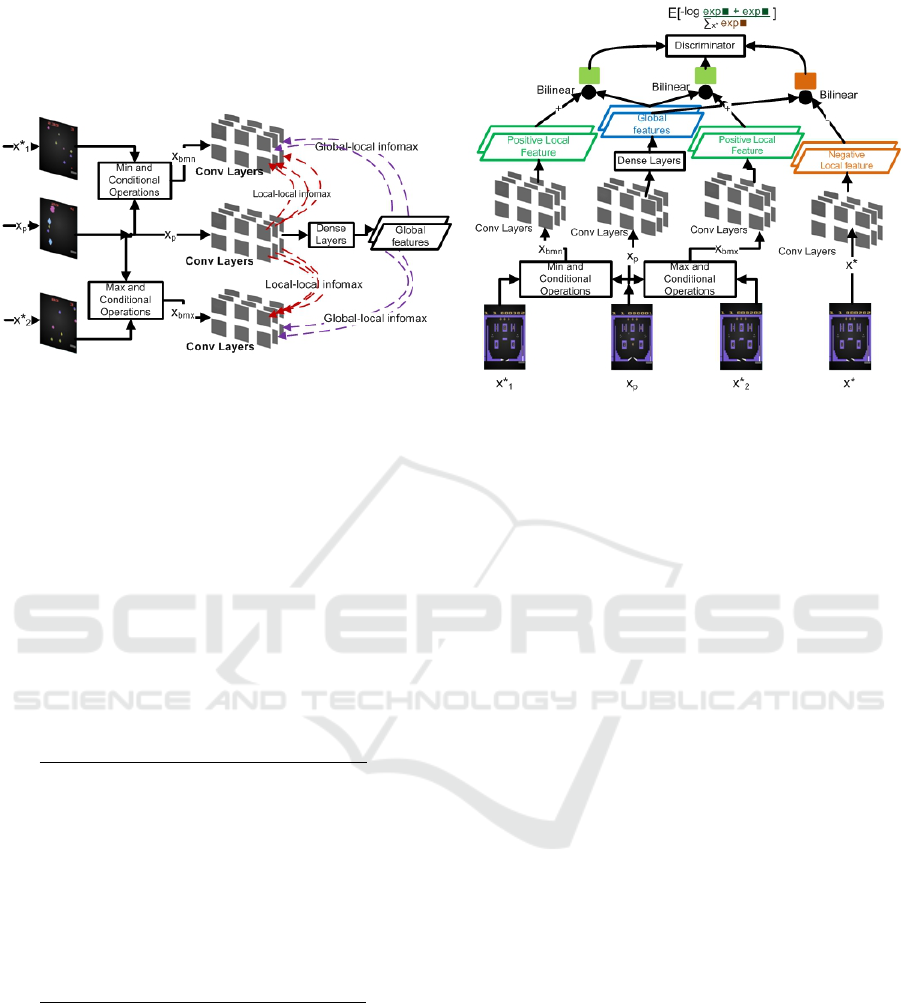
Figure 1: A schematic overview of Balanced View Spatial Deep InfoMax (BVS-DIM). Left: The two different mutual in-
formation objectives i.e. Local-Local (LL) infomax and Global-Local (GL) infomax. Right: A simplified version of the GL
contrastive task. The two negative samples x
∗
1
and x
∗
2
represent negative samples selected from the mini-batch randomly with
uniform probability distributions. These two negative samples are used along x
p
to construct the x
bmn
and x
bmx
balanced
views. x
∗
represents all negative samples in the mini-batch including x
∗
1
and x
∗
2
, and other than x
p
. In practice, we used only
two positive samples and multiple negative samples.
struct two loss functions modifying the generic In-
foNCE equation 6 for our BVS-DIM: the loss follow-
ing the GL MI objective, L
GL
, as given in equation 7
and the loss following the LL MI objective, L
LL
, as
given in equation 8.
L
GL
=
M
∑
m=1
N
∑
n=1
−log
exp(g
m,n
(x
p
, x
bmn
)) + exp(g
m,n
(x
p
, x
bmx
))
(
∑
x
∗
∈X and x
∗
̸=x
p
exp(g
m,n
(x
p
, x
∗
)))
!
(7)
where the score function for the GL MI objective,
g
m,n
(x
1
, x
2
) = ψ(x
1
)
T
W
g
ψ
m,n
(x
2
) and ψ
m,n
is the lo-
cal feature vector produced by an intermediate layer
in ψ at the (m, n) spatial location.
L
LL
=
M
∑
m=1
N
∑
n=1
−log
exp( f
m,n
(x
p
, x
bmn
)) + exp( f
m,n
(x
p
, x
bmx
))
2(
∑
x
∗
∈Xandx
∗
̸=x
p
exp( f
m,n
(x
p
, x
∗
)))
!
(8)
where the score function for the LL MI objective,
f
m,n
(x
1
, x
2
) = ψ
m,n
(x
1
)
T
W
l
ψ
m,n
(x
2
).
5 EXPERIMENTAL SETUP
Even though unsupervised learning of state represen-
tations are developed, evaluating the usefulness of a
representation is still an open problem because the
objectives and core utilities of these features during
training are different when used in their downstream
tasks. For example, measuring classification perfor-
mance will only show the goodness of the represen-
tation for class relevant features. Devising a generic
way of measurement of the general goodness of the
representation is essential (Anand et al., 2019).
Video games, like Atari games, are useful candi-
date for evaluating visual representation learning al-
gorithms and they provide ready access to the under-
lying ground truth states which are required to evalu-
ate performance of different techniques. In ST-DIM,
the ground truth state information (a state label for
every example frame generated from the game) has
been annotated for each frame of 22 Atari games to
make evaluation of the goodness of the representa-
tion (See (Anand et al., 2019)). We have used this
ST-DIM benchmark on Atari games using the Ar-
cade Learning Environment (ALE) (Bellemare et al.,
2013) and modified it to incorporate theBVS-DIM
method for evaluating the goodness of the learned
representations. Therefore, the goodness of the rep-
resentations is evaluated against the performance of
bi-linear classifiers for state variables taking the fea-
tures learned as an input. There are categories of state
variables, and the classification performances are av-
eraged for each category in each game. Then final
average of the game across categories is reported as
F1 classification score of the game. For the sake
of comparison, we have used the same data collec-
tion methods and the same randomly-initialized CNN
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
114

encoder (RANDOM-CNN) architecture taken from
(Mnih et al., 2013) and adapted for the full 160x210
Atari frame size with the feature representation space
of 256.
In probing stage, we trained the 256-way linear
classifier models with the learned representation of
the encoder as input. Only state variables with high
entropy are considered, and duplicates are removed.
We used the same probing conditions, number of
training, validation and testing samples as well as
early stopping and a learning rate scheduler as used
in ST-DIM.
We made two categories of tests. The first
category, for consecutive time step tuples of
(x
t−1
, x
t
, x
t+1
) from χ. For this category, we have
used equations 1 and 2 to construct the views x
min
and
x
max
from (x
t−1
, x
t
) and (x
t
, x
t+1
), respectively. We
have used GL-only MI objective. For the second cat-
egory of tests, we have used randomly selected tuples
of (x
p
, x
∗
1
, x
∗
2
) from χ
′
. We have followed the opera-
tions specified in equations 1 through 5 to construct
the views x
bmn
and x
bmx
from (x
p
, x
∗
1
) and (x
p
, x
∗
2
), re-
spectively. We tested several balancing ratios rang-
ing from 0.65 to 0.85 with the interval of significant
change, i.e. 0.05. We also tested both for the GL-only
and the combined GL-LL MI objectives.
Since number of tests were in the order of hun-
dreds for the second category, we limited the num-
ber of epochs and for fair comparison, the bench-
mark tests are also re-executed. To balance the ra-
tio of positive-to-negative signals in the constructed
views, we performed the tests on five Atari games
with ratios of {0.65, 0.70, 0.75, 0.80, 0.85} for both
GL-only and GL-LL MI objectives. From these five
game experiments, we found 0.70 and 0.75 for GL-
only and 0.80 for GL-LL MI objectives to work well
in the goodness of the learned state representations.
Based on the results, we performed tests for all 22
Atari games for GL-only-0.70, GL-only-0.75 and GL-
LL-0.80 along with the benchmark, ST-DIM, method
and made comparisons. To show how ST-DIM also
works for randomly selected pairs, we made two sets
of tests for ST-DIM; ST-DIM (C) stands for ST-DIM
with consecutive (t and t +1) observations while ST-
DIM (R) stands for ST-DIM with randomly selected
pairs of observations selected from the mini-batch
with uniform probability distribution. To make com-
parisons with contrastive learning based on other aug-
mented views, we made tests using views created as
in AMDIM (Bachman et al., 2019). We also made
tests replacing random noise instead of taking pixels
from negative samples for constructed views in the
mini-batch (BVS-DIM with noise).
Additionally, we have made ablation analysis by
making a breakdown of the results with respect to
each category of state variables. We have also made
a test on the presence of an easy to exploit features,
bounding boxes on each display variables, and made
comparison with the baseline method.
6 RESULTS AND DISCUSSION
As presented in section 4, the goodness of the repre-
sentation is its capability in capturing the underlying
generative factors of the environment. In Atari games,
the crucial underlying generative factors of the envi-
ronment are state variables which can be directly used
to control the game dynamics or query the game infor-
mation (Bellemare et al., 2013), (Anand et al., 2019).
6.1 Using Consecutive Time-step Tuples
As presented in section 5, consecutive time step
frames are used to create the constructed views (only
using equations 1 and 2) and used GL-only MI objec-
tive. We performed tests for the 22 Atari games with
NoFrameskip and 16 Atari Games with Framesskip
setting as well as the benchmark ST-DIM as shown
in Table 1. We have used GL-only MI objective and
achieved comparable results without applying balanc-
ing the positive-to-negative signal ratio as the frames
are consecutive.
With the 22 NoFrameskip Atari games, BVS-
DIM method outperformed ST-DIM in 12 games and
it has achieved almost comparable results with ST-
DIM in seven games. To show the robustness of
the BVS-DIM method under the absence of similar-
ity of consecutive observations, we tested the BVS-
DIM method and the benchmark with 16 Frameskip
type Atari games. The mean F1 classification score
difference of the BVS-DIM method with ST-DIM
widened from 3% (with NoFrameskip games) to 5%
(with Frameskip games).
In the Frameskip setting, the BVS-DIM method
exceeded ST-DIM in 15 games while it has lev-
eled with ST-DIM in one game. The widened
gap observed between ST-DIM and BVS-DIM with
Frameskip games shows that the BVS-DIM method
is robust to the sampling rates of the observations
while ST-DIM is affected with the sampling rates of
the observations.
6.2 Using Randomly Selected Tuples
After constructing positive views x
bmn
and x
bmx
from
(x
∗
1
, x
p
) and (x
p
, x
∗
2
), respectively using equations 1
through 5, we carry out tests for all 22 Atari games for
Unsupervised Learning of State Representation using Balanced View Spatial Deep InfoMax: Evaluation on Atari Games
115

Table 1: Probe F1 classification scores averaged across categories for each game (data collected by random agents) with 2
nd
and 3
rd
columns for NoFrameskip and 4
th
and 5
th
columns for Frameskip = 4 setting. The GL-only MI objective with ratio
of 0.50 is used with BVS-DIM. Consecutive (t and t + 1) frames are used in both BVS-DIM and ST-DIM.
NoFrameskip Frameskip
GAME ST-DIM BVS-DIM (GL) ST-DIM BVS-DIM (GL)
ASTEROIDS 0.49 0.45 0.37 0.45
BERZERK 0.53 0.55 - -
BOWLING 0.96 0.96 0.95 0.98
BOXING 0.58 0.74 0.54 0.66
BREAKOUT 0.88 0.88 - -
DEMONATTACK 0.69 0.65 0.67 0.71
FREEWAY 0.81 0.95 0.76 0.87
FROSTBITE 0.75 0.76 - -
HERO 0.93 0.95 0.85 0.87
MONTEZUMAREVENGE 0.78 0.79 0.69 0.71
MSPACMAN 0.72 0.71 0.44 0.47
PITFALL 0.60 0.72 0.77 0.80
PONG 0.81 0.86 0.93 0.94
PRIVATEEYE 0.91 0.91 0.85 0.89
QBERT 0.73 0.67 - -
RIVERRAID 0.36 0.43 - -
SEAQUEST 0.67 0.72 - -
SPACEINVADERS 0.57 0.62 0.45 0.49
TENNIS 0.60 0.66 0.63 0.66
VENTURE 0.58 0.61 0.57 0.62
VIDEOPINBALL 0.61 0.66 0.53 0.55
YARSREVENGE 0.42 0.43 0.28 0.33
MEAN 0.68 0.71 0.64 0.69
GL-0.70, GL-0.75 and GL-LL-0.80 and made compar-
ison of BVS-DIM with ST-DIM.
The ST-DIM tests were re-executed as we
changed the number of epochs in this comparison and
we used 30 epochs for all tests of this category. Ta-
ble 2 shows the test results of the ST-DIM, GL-only
MI objective with 0.70 and 0.75 balancing ratios and
GL-LL MI objective with 0.80 balancing ratio. The
BVS-DIM with GL-LL MI objective and with 0.80
balancing ratio outperformed the benchmark ST-DIM
in 14 games while the baseline has exceeded in only
one game. To see the effect of negative sample pix-
els versus arbitrary noise in the constructed views, we
have modified the constructed views to take arbitrary
noise than taking pixels from negative samples. We
tested BVS-DIM with GL-LL-0.80 MI objective for
the noise (i.e. the noise constitutes about 20% in each
view) and we designate BVS-DIM-N (GL-LL-0.80)
in Table 2. The corresponding BVS-DIM (GL-LL-
0.80) with 20% pixels from other image samples has
a mean of 3% better performance than BVS-DIM-
N (GL-LL-0.80). This experiment shows that taking
pixels from other samples enhances the discriminat-
ing power of the encoders.
We have also made standard image augmentation
operation used as in AMDIM (Bachman et al., 2019)
and evaluated usign the same GL-LL MI objective
for fair comparison. The result of augmented views
contrastive learning using similar operators as used
in AMDIM for Atari games performs very low com-
pared to both BVS-DIM and ST-DIM. Even though
further analysis is required, we hypothesize that stan-
dard augmentation operators provided in AMDIM
(Bachman et al., 2019) aren’t optimal for state rep-
resentation learning of Atari games since the screen
images of Atari games contain smaller objects rele-
vant to the game outcome which may become much
distorted or lost in these augmentation operations.
The BVS-DIM method maintained the same per-
formance with randomly selected tuples and careful
selection of balancing ratio even with a training of
smaller number of epochs. The average F1 classifica-
tion score of BVS-DIM with GL-only 0.70 exceeded
ST-DIM (C) (ST-DIM with consecutive frames) with
3% while the average F1 classification score of BVS-
DIM with GL-LL 0.80 and GL-0.75 MI objectives at-
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
116

Table 2: Probe F1 classification scores averaged across categories for each game (data collected by random agents). The tuples
used in BVS-DIM methods are randomly selected from each mini-batch to construct two balanced views. The pairs used in
ST-DIM (R) are randomly selected pairs while the pairs used in ST-DIM (C) are time consecutive frames selected from each
mini-batch. We have included the results of the experimental results using the same image augmentation techniques as used
in AMDIM and the fully supervised learning for comparison.
GAME ST-
DIM
(R)
ST-
DIM
(C)
AM-
DIM
BVS-
DIM-N
(GL-LL
-0.80)
BVS-
DIM
(GL-
0.70)
BVS
-DIM
(GL-
0.75)
BVS
-DIM
(GL-LL
-0.80)
SU-
PER-
VISED
ASTEROIDS 0.41 0.48 0.34 0.45 0.46 0.45 0.48 0.52
BERZERK 0.30 0.51 0.43 0.53 0.54 0.56 0.56 0.68
BOWLING 0.34 0.94 0.60 0.86 0.95 0.94 0.93 0.95
BOXING 0.21 0.57 0.16 0.65 0.76 0.76 0.75 0.83
BREAKOUT 0.57 0.87 0.42 0.86 0.89 0.86 0.89 0.94
DEMONATTACK 0.44 0.69 0.30 0.65 0.66 0.64 0.66 0.83
FREEWAY 0.28 0.78 0.50 0.91 0.94 0.94 0.92 0.98
FROSTBITE 0.65 0.70 0.55 0.68 0.71 0.70 0.74 0.85
HERO 0.83 0.91 0.71 0.93 0.94 0.93 0.93 0.98
MONTEZUMAREVENGE 0.52 0.77 0.52 0.77 0.76 0.77 0.79 0.87
MSPACMAN 0.37 0.69 0.51 0.71 0.70 0.69 0.71 0.87
PITFALL 0.43 0.77 0.29 0.66 0.76 0.76 0.77 0.83
PONG 0.54 0.82 0.38 0.77 0.83 0.85 0.83 0.87
PRIVATEEYE 0.61 0.88 0.64 0.84 0.87 0.88 0.88 0.97
QBERT 0.52 0.64 0.52 0.66 0.64 0.67 0.68 0.76
RIVERRAID 0.23 0.32 0.22 0.40 0.42 0.41 0.42 0.57
SEAQUEST 0.56 0.64 0.56 0.67 0.66 0.65 0.65 0.85
SPACEINVADERS 0.33 0.54 0.40 0.58 0.57 0.62 0.61 0.75
TENNIS 0.08 0.57 0.39 0.59 0.65 0.66 0.64 0.81
VENTURE 0.46 0.64 0.44 0.57 0.65 0.63 0.64 0.68
VIDEOPINBALL 0.23 0.70 0.35 0.70 0.69 0.71 0.75 0.82
YARSREVENGE 0.09 0.41 0.15 0.48 0.38 0.40 0.48 0.74
MEAN 0.41 0.67 0.43 0.68 0.70 0.71 0.71 0.82
tained a margin of 4% over ST-DIM (C).
As shown in Table 2, the performance of ST-DIM
(R) (ST-DIM with random pairs of frames) is much
lower and it shows that agents having low sampling
rate of their observations can’t use ST-DIM in their
unsupervised representation learning. In contrast to
ST-DIM, BVS-DIM’s performance for both consecu-
tive frames (as shown in Table 1) and randomly se-
lected frames (as given in Table 2) is better than ST-
DIM and enables agents to learn representations even
from their sparse and uneven observations.
6.3 Ablation Analysis
We provide a breakdown of probe results averaged
for all 22 Atari games in each category of state vari-
ables in Table 3 for the random agent. The BVS-DIM
method outperformed or at least leveled with ST-DIM
in all the five categories of state information. The
BVS-DIM method has shown better or similar sta-
bility in comparison with ST-DIM in its small object
localization capability and all other category of state
variables as shown in Table 3 and robustness to pres-
ence of easy-to-exploit features as shown in Table 4.
The results shown in Table 3 are supporting the
stability and robustness of the BVS-DIM method in
its capability of small object localization, agent local-
ization and all other categories of state variables as
it exceeded or leveled with the baseline. The BVS-
DIM with GL-LL MI objective function and 0.80 bal-
ancing ratio outperformed other variants of the BVS-
DIM settings.
The results shown in Table 4 are supporting the
stability and robustness of the BVS-DIM method in
the presence of an easy to exploit feature, namely the
boxing of the state variables in the screen images.
The state variables are only changing in the spatio-
temporal sequences while the boxing remains static.
As shown in Table 4, the BVS method with GL MI
objective and 0.70 and 0.75 balancing ratios as well
Unsupervised Learning of State Representation using Balanced View Spatial Deep InfoMax: Evaluation on Atari Games
117
Table 3: Probe F1 classification scores for different methods averaged across all games for each category
CATEGORY ST-
DIM(C)
BVS-DIM
(GL-LL-80-N)
BVS-DIM
(GL-0.7)
BVS-DIM
(GL-0.75)
BVS-DIM
(GL-LL-0.8)
Small Object Localization 0.48 0.50 0.46 0.47 0.48
Agent Localization 0.54 0.57 0.61 0.60 0.61
Other Localization 0.69 0.69 0.71 0.70 0.74
Score/Clock/Lives Display 0.89 0.86 0.89 0.89 0.90
Misc Keys 0.71 0.72 0.73 0.74 0.75
Table 4: Breakdown of Accuracy Scores for every state variable which is displayed boxed in the screen for ST-DIM, BVS-
DIM-GL-0.70, BVS-DIM-GL-0.75 and BVS-DIM-GL-LL-0.80. It is an ablation that removes the spatial contrastive con-
straint, for the Boxing, an easy to exploit features but not relevant to the state variables.
METHOD ST-DIM BVS-DIM BVS-DIM BVS-DIM
(GL-0.70) (GL-0.75) (GL-LL-0.8)
CLOCK 0.95 0.97 0.94 0.97
ENEMY SCORE 0.98 0.99 0.96 1.00
ENEMY X 0.56 0.62 0.63 0.64
ENEMY Y 0.64 0.68 0.68 0.69
PLAYER SCORE 0.93 0.95 0.95 0.97
PLAYER X 0.49 0.53 0.54 0.55
PLAYER Y 0.60 0.65 0.65 0.66
as the GL-LL MI objective with 0.80 balancing ra-
tio achieved better results in almost all state variables.
The BVS-DIM outperformed ST-DIM in capturing
the most relevant spatio-temporally evolving factors
of state variables even in the presence of easy to ex-
ploit features as shown in Table 4.
7 CONCLUSION
We presented a new unsupervised state represen-
tation learning technique, named BVS-DIM. The
method uses MI maximization between representa-
tions of a given sample with its balanced constructed
view across spatial axes. The constructed views
are created through balancing ratio of pixel selection
from the sample itself and other randomly selected
samples (positive-to-negative signal ratio). On the
Atari Games suite, BVS-DIM achieved a marginal
better performance than the state-of-the-art baseline
method, ST-DIM, with 4% average F1 classification
score improvement.
Results showed that the method does not require
consecutive observations with high sampling rates.
Therefore, BVS-DIM enables agents with temporally
sparse observations to successfully learn the repre-
sentation of their observations in unsupervised man-
ner even under the absence of similarity between their
successive observations. These interesting properties
make it possible to consider the application of the
proposed learning method to longer episodes and un-
der more varied environmental conditions than cur-
rent methods.
ACKNOWLEDGEMENTS
This research is funded by the French Embassy and
the Ethiopian Ministry of Science and Higher Educa-
tion (MoSHE) through the higher education capacity
building program.
REFERENCES
Anand, A., Racah, E., Ozair, S., Bengio, Y., C
ˆ
ot
´
e, M.-A.,
and Hjelm, R. D. (2019). Unsupervised state repre-
sentation learning in atari. In Advances in Neural In-
formation Processing Systems, pages 8766–8779.
Bachman, P., Hjelm, R. D., and Buchwalter, W. (2019).
Learning representations by maximizing mutual infor-
mation across views. In Advances in Neural Informa-
tion Processing Systems, pages 15509–15519.
Belghazi, M. I., Baratin, A., Rajeswar, S., Ozair, S., Bengio,
Y., Courville, A., and Hjelm, R. D. (2018). Mine:
mutual information neural estimation. arXiv preprint
arXiv:1801.04062.
Bellemare, M. G., Naddaf, Y., Veness, J., and Bowling, M.
(2013). The arcade learning environment: An evalua-
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
118

tion platform for general agents. Journal of Artificial
Intelligence Research, 47:253–279.
Carlson, T. A., Simmons, R. A., Kriegeskorte, N., and
Slevc, L. R. (2014). The emergence of semantic mean-
ing in the ventral temporal pathway. Journal of cogni-
tive neuroscience, 26(1):120–131.
Chen, X., Duan, Y., Houthooft, R., Schulman, J., Sutskever,
I., and Abbeel, P. (2016). Infogan: Interpretable rep-
resentation learning by information maximizing gen-
erative adversarial nets. In Advances in neural infor-
mation processing systems, pages 2172–2180.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-Fei,
L. (2009). Imagenet: A large-scale hierarchical image
database. In 2009 IEEE conference on computer vi-
sion and pattern recognition, pages 248–255.
Forestier, S., Mollard, Y., and Oudeyer, P.-Y. (2017).
Intrinsically motivated goal exploration processes
with automatic curriculum learning. arXiv preprint
arXiv:1708.02190.
Gordon, R. D. and Irwin, D. E. (1996). What’s in an object
file? evidence from priming studies. Perception &
Psychophysics, 58(8):1260–1277.
Gutmann, M. and Hyv
¨
arinen, A. (2010). Noise-contrastive
estimation: A new estimation principle for unnormal-
ized statistical models. In Proceedings of the Thir-
teenth International Conference on Artificial Intelli-
gence and Statistics, pages 297–304.
Hjelm, R. D., Fedorov, A., Lavoie-Marchildon, S., Grewal,
K., Bachman, P., Trischler, A., and Bengio, Y. (2019).
Learning deep representations by mutual information
estimation and maximization. International Confer-
ence on Learning Representations (ICLR).
Jonschkowski, R. and Brock, O. (2015). Learning state rep-
resentations with robotic priors. Autonomous Robots,
39(3):407–428.
Jonschkowski, R., Hafner, R., Scholz, J., and Riedmiller,
M. (2017). Pves: Position-velocity encoders for unsu-
pervised learning of structured state representations.
arXiv preprint arXiv:1705.09805.
Kalantidis, Y., Sariyildiz, M. B., Pion, N., Weinzaepfel, P.,
and Larlus, D. (2020). Hard negative mixing for con-
trastive learning. arXiv preprint arXiv:2010.01028.
Khan, A., Sohail, A., Zahoora, U., and Qureshi, A. S.
(2020). A survey of the recent architectures of deep
convolutional neural networks. Artificial Intelligence
Review, 53(8):5455–5516.
Kingma, D. P. and Welling, M. (2013). Auto-encoding vari-
ational bayes. arXiv preprint arXiv:1312.6114.
Lake, B. M., Ullman, T. D., Tenenbaum, J. B., and Gersh-
man, S. J. (2017). Building machines that learn and
think like people. Behavioral and brain sciences, 40.
Lesort, T., D
´
ıaz-Rodr
´
ıguez, N., Goudou, J.-F., and Filliat,
D. (2018). State representation learning for control:
An overview. Neural Networks, 108:379–392.
Ma, Z. and Collins, M. (2018). Noise contrastive estima-
tion and negative sampling for conditional models:
Consistency and statistical efficiency. arXiv preprint
arXiv:1809.01812.
Marr, D. (1982). Vision: A computational investigation into
the human representation and processing of visual in-
formation. The Modern Schoolman, 2(4.2).
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M.
(2013). Playing atari with deep reinforcement learn-
ing. arXiv preprint arXiv:1312.5602.
Nair, A. V., Pong, V., Dalal, M., Bahl, S., Lin, S., and
Levine, S. (2018). Visual reinforcement learning with
imagined goals. In Advances in Neural Information
Processing Systems, pages 9191–9200.
Oh, J., Guo, X., Lee, H., Lewis, R. L., and Singh, S. (2015).
Action-conditional video prediction using deep net-
works in atari games. In Advances in neural infor-
mation processing systems, pages 2863–2871.
Oord, A. v. d., Li, Y., and Vinyals, O. (2018). Representa-
tion learning with contrastive predictive coding. arXiv
preprint arXiv:1807.03748.
P
´
er
´
e, A., Forestier, S., Sigaud, O., and Oudeyer, P.-Y.
(2018). Unsupervised learning of goal spaces for in-
trinsically motivated goal exploration. arXiv preprint
arXiv:1803.00781.
Poole, B., Ozair, S., Oord, A. v. d., Alemi, A. A., and
Tucker, G. (2019). On variational bounds of mutual
information. arXiv preprint arXiv:1905.06922.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M., Berg, A. C., and Fei-Fei, L. (2015). Ima-
geNet Large Scale Visual Recognition Challenge. In-
ternational Journal of Computer Vision, 115(3):211–
252.
Sermanet, P., Lynch, C., Chebotar, Y., Hsu, J., Jang, E.,
Schaal, S., Levine, S., and Brain, G. (2018). Time-
contrastive networks: Self-supervised learning from
video. In 2018 IEEE International Conference on
Robotics and Automation (ICRA), pages 1134–1141.
Sohn, K. (2016). Improved deep metric learning with multi-
class n-pair loss objective. In Advances in neural in-
formation processing systems, pages 1857–1865.
Sønderby, C. K., Raiko, T., Maaløe, L., Sønderby, S. K.,
and Winther, O. (2016). Ladder variational autoen-
coders. In Advances in neural information processing
systems, pages 3738–3746.
Visani, G. M., Hughes, M. C., and Hassoun, S. (2020).
Hierarchical classification of enzyme promiscuity us-
ing positive, unlabeled, and hard negative examples.
arXiv preprint arXiv:2002.07327.
Wang, W., Zhou, T., Yu, F., Dai, J., Konukoglu, E., and
Van Gool, L. (2021). Exploring cross-image pixel
contrast for semantic segmentation. arXiv preprint
arXiv:2101.11939.
Unsupervised Learning of State Representation using Balanced View Spatial Deep InfoMax: Evaluation on Atari Games
119
