
Exploiting EEG-extracted Eye Movements for a Hybrid SSVEP Home
Automation System
Tracey Camilleri
1 a
, Jeanluc Mangion
1,2
and Kenneth Camilleri
1,2 b
1
Department of Systems and Control Engineering, University of Malta, Msida MSD2080, Malta
2
Centre for Biomedical Cybernetics, University of Malta, Msida MSD2080, Malta
Keywords:
Hybrid BCI, SSVEP, Eye Movement Detection, EEG.
Abstract:
Detection of eye movements using standard EEG channels can allow for the development of a hybrid BCI
(hBCi) system without requiring additional hardware for eye gaze tracking. This work proposes a hierarchical
classification structure to classify eye movements into eight different classes, covering both horizontal and
vertical eye movements, at two different gaze angles in each of four directions. Results show that the highest
eye movement classification was obtained with frontal EEG channels, achieving an accuracy of 98.47% for
two directions, 74.38% with four directions and 58.31% with eight directions. Eye movements can also be
classified reliably in four directions using occipital electrodes with an accuracy of 47.60% which increases to
around 80% if three frontal channels are also included. The latter result was used to develop a hybrid SSVEP
home automation system which exploits the EEG-extracted eye movement information. Results show that a
sequential hBCI gave an average accuracy of 82.5% when compared to the 69.17% obtained with a standard
SSVEP based BCI system.
1 INTRODUCTION
Electroencephalography (EEG) is the recording of
brain signals using non-invasive electrodes, typically
used for the development of EEG-based brain com-
puter interface (BCI) systems. One of the most
promising BCI systems is that based on steady-state
visual evoked potentials (SSVEPs) which are elicited
in the occipital region of the brain when the subject
attends to a set of flickering stimuli. When making
use of such a system the user carries out a series of
eye movements to saccade from one stimulus to an-
other, selecting a sequence of command functions in
the process. Eye movements have been used in hy-
brid BCI systems aimed to improve the BCI perfor-
mance either by recording electrooculographic (EOG)
signals (Padfield, 2017) or through a vision based
eye gaze tracker (Saravanakumar, 2018). The for-
mer however requires an extra set of electrodes placed
around the subject’s eyes whereas the latter requires
additional hardware.
This work investigates the possibility of classify-
ing eye movements typically carried out during the
a
https://orcid.org/0000-0002-4908-1863
b
https://orcid.org/0000-0003-0436-6408
use of an SSVEP-based BCI, using standard EEG sig-
nals only, thus allowing for the possibility to design a
simple hybrid BCI requiring only the use of an EEG
cap. Some researchers (Gupta et al., 2012; Hsieh
et al., 2014) took this approach but the classification
of the eye movements was limited to horizontal eye
movements, typically distinguishing between left and
right eye movements only. Belkacem et al. (Belka-
cem et al., 2013; Belkacem et al., 2015) however
attempted to classify both horizontal (left vs right)
and vertical (up vs down) eye movements, obtaining
an accuracy of 98% for the horizontal and 46% for
the vertical eye movements in their most recent work
(Belkacem et al., 2015). Dietriech et al. (Dietriech
M. P., 2017) also considered the classification of four
extreme eye movements and the central position and
obtained a true positive rate of 96.6% for one subject
using a KNN classifier.
In (Gupta et al., 2012; Hsieh et al., 2014; Belka-
cem et al., 2013; Belkacem et al., 2015; Dietriech
M. P., 2017), frontal and temporal electrodes were
used but none of the works investigated the possi-
ble detection of the eye movements through occipital
electrodes, which are the standard set of electrodes
used in SSVEP-based BCIs. Furthermore, eye move-
ments were limited to left, right, up and down move-
Camilleri, T., Mangion, J. and Camilleri, K.
Exploiting EEG-extracted Eye Movements for a Hybrid SSVEP Home Automation System.
DOI: 10.5220/0010783800003123
In Proceedings of the 15th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2022) - Volume 4: BIOSIGNALS, pages 117-127
ISBN: 978-989-758-552-4; ISSN: 2184-4305
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
117

ments. This work thus aims to investigate the extent
at which eye movement information can be extracted
from the frontal region, occipital region, or both, and
whether it is possible to classify a saccadic eye move-
ment of different visual angles. These results are then
exploited within an SSVEP-based home automation
system where a comparative analysis is carried out to
assess the performance of a hybrid BCI which fuses
EEG-based eye movement information with SSVEP
information and compare it with that of a standard
SSVEP-based BCI system.
This paper is divided as follows: Section 2
presents the experimental setup, the processing of
data and the method used to classify eye movements,
Section 3 presents and discusses the results related
to the EEG-based eye movement detection, Section
4 presents the hybrid SSVEP-based home automation
system with the results obtained for both an offline
and an online study and finally Section 5 concludes
the paper.
2 METHOD
2.1 Experimental Setup and Data
Acquisition
A computer system with a 22 inch monitor, a resolu-
tion of 1920 × 1080 pixels and a refresh rate of 60Hz
was used. The g.USBamp from g.tec was used for
EEG data acquisition. The visual stimuli were de-
signed using PsychoPy (Peirce et al., 2019), an open-
source Python toolbox, which permits control of the
timing of the stimuli with very high precision.
EEG data was recorded at a sampling frequency
of 256 Hz from a total of 19 channels: O1, Oz, O2,
PO7, PO3, POz, PO4, PO8, T7, FT7, F7, AF7, Fp1,
Fpz, Fp2, AF8, F8, FT8 and T8. This set of electrodes
was chosen in order to carry out a thorough analysis
of which combination of frontal channels is best to
extract eye-movement related EEG and to determine
to what extent is the occipital region capable of pro-
viding such information.
Five healthy subjects participated in this study
which was approved by the University Research
Ethics Committee (UREC) of the University of Malta.
Every participant was seated in front of an LCD mon-
itor, placed approximately at eye-level with the sub-
ject. Participants were advised to limit their physical
movement to avoid EMG artifacts. A chin rest was
provided to restrict head movements. This setup was
used to ensure that for this preliminary study the data
is not confounded by artifacts.
Figure 1: Positions considered on screen for 8 different sac-
cadic movements.
Figure 2: Timing protocol of a single trial.
EEG-based eye-gaze data was recorded for of-
flline analysis. Five sessions were recorded and in
each session, 10 trials were allocated for each po-
sition, amounting to a total of 80 trials. In a trial,
the subject was instructed to look at the center of the
screen for 1 second, saccade to one of eight positions
on the screen as shown in Fig. 1 for another 1 second
and saccade back to the center in the next 1 second.
Subjects were instructed to blink only during rest pe-
riods which were indicated by a red stimulus at the
last 1 second of each trial. The timing protocol of a
single trial is shown in Fig. 2. A rest period of 1.5
seconds was allocated after each trial.
2.2 Data Processing
EEG data was filtered with a 4
th
order infinite im-
pulse response bandpass filter having cut-off frequen-
cies of 0.5 Hz and 7 Hz. Common spatial patterns
(CSP) (Ramoser et al., 2000) was then used as the
feature extraction method. CSP applies a joint diago-
nalisation on the covariance matrices of two classes,
resulting in a transformation W . This is applied to the
EEG data, X ∈ R
N×T
, where N represents the num-
ber of channels and T the length of the data, to project
this to Z ∈ R
N
1
×T
with a reduced number of channels
N
1
< N., The variance of each channel is then used as
a feature vector, i.e. v = [σ
2
1
,.. .,σ
2
N
1
]
T
where σ
2
i
is the
variance of channel i of Z . A support vector machine
as in (Bishop, 2006) was then applied to classify fea-
tures into two classes. Since both the CSP and SVM
algorithm require training, the recorded data was di-
vided into three sets; one was used to train the CSP,
the other to train the SVM and the third was used as
BIOSIGNALS 2022 - 15th International Conference on Bio-inspired Systems and Signal Processing
118

test data. A three fold cross validation approach was
then adopted to quantify performance.
2.3 Classifying Eye Movements
A hierarchical classification system was used to clas-
sify an eye movement into one of eight possible
classes. As shown in Fig. 3, the hierarchy consists
of three tiers. At the top tier, epochs are classified
as either horizontal (H) or vertical (V) saccadic eye
movements. Once labelled, epochs are passed down
to the second tier where the H labelled saccades are
passed to the ‘Left (L) vs Right (R) vs Others (O)’
classifier while the V labelled saccades are passed to
the ‘Up (U) vs Down (D) vs Others (O)’ classifier. It
must be noted that although three classes are present
from the second tier downwards, both the CSP algo-
rithm and the SVM classifier were executed by per-
forming independent pairwise classifications between
all pairs of classes and assigning the majority class to
the trial (Johannes M. G., 1999), known as the ‘One
vs One’ approach. Epochs labeled as ‘Others’ within
the second tier are passed on to the sibling class on
the same tier. For example, a saccade labelled as O
by the ‘L vs R vs O’ classifier is passed to its sibling
class, specifically to the ‘U vs D’ classifier within the
’U vs D vs O’ block.
Finally, at the third tier, epochs are classified ac-
cording to the visual angle of the horizontal or vertical
saccade where a visual angle of 23.9
◦
from the screen
centre is labelled as ’far’ (F), while a 12.5
◦
visual an-
gle is labelled as ’near’ (N). For example, trials la-
belled as L from the second tier are passed to a ’Near
Left (NL) vs Far Left (FL) vs O’ classifier. Similar to
classifiers at the second tier, eye movements classified
as O are passed on to their sibling classifier within this
third tier.
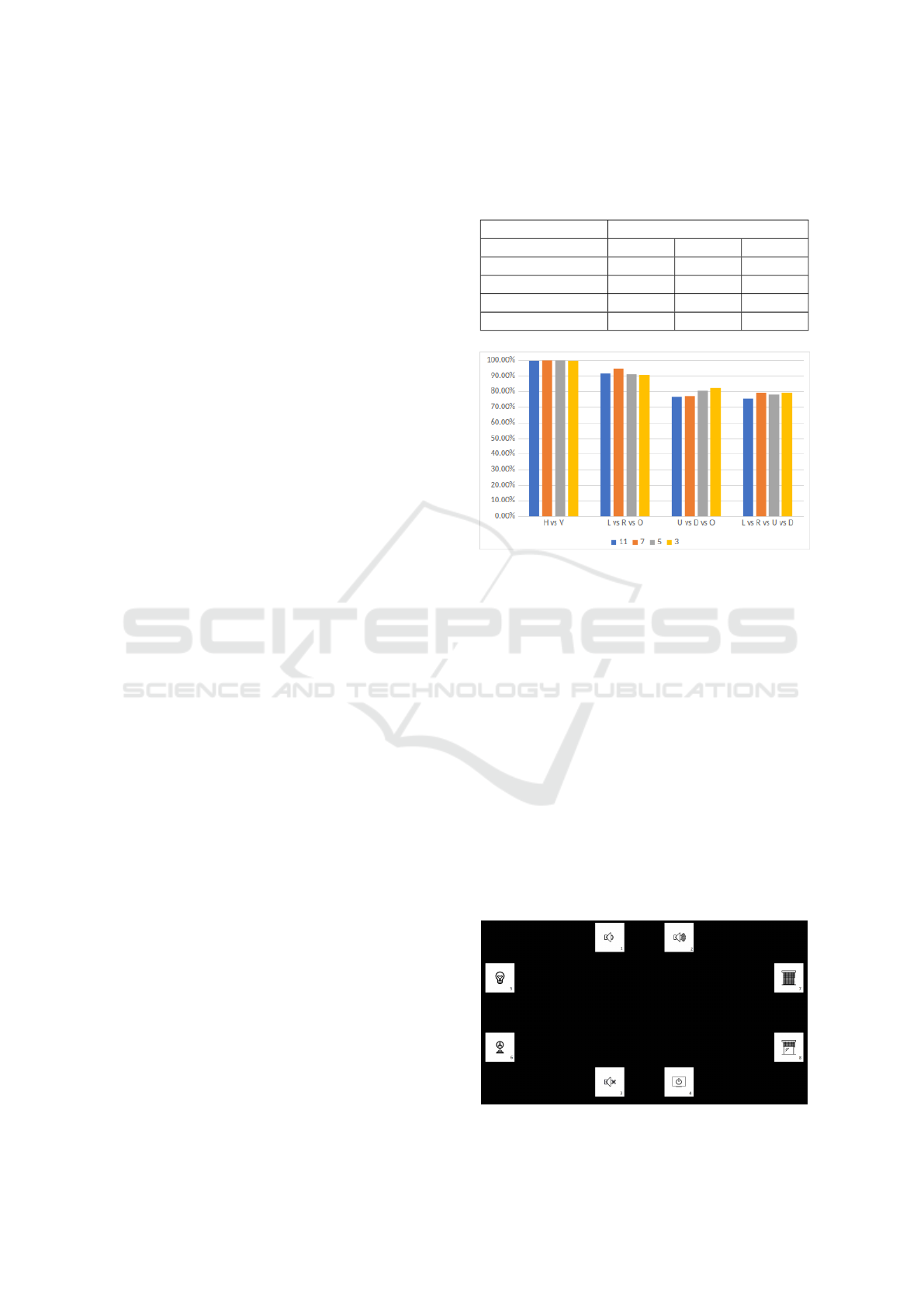
2.4 Performance across Different Scalp
Regions
Part of the analysis carried out was to investigate how
the eye movement classification performance varies
when considering EEG channels at i) frontal chan-
nels, ii) occipital channels and iii) both frontal and oc-
cipital channels combined. For the frontal channels,
subsets of 11, 7, 5 and 3 channels were also consid-
ered as in Table 1.
Table 1: Subsets of considered frontal channels.
Number
of Frontal
Channels
Frontal Channels
11 T7, FT7, F7, AF7, Fp1, Fpz, Fp2,
AF8, F8, FT8 T8
7 F7, AF7, Fp1, Fpz, Fp2, AF8 F8
5 AF7, Fp1, Fpz, Fp2 AF8
3 AF7, Fpz, AF8
3 RESULTS
3.1 Hierarchical Classification
Initially, the testing trials were passed through the hi-
erarchical structure and labelled into one of the 8 pos-
sible classes. Table 2 shows the classification accu-
racy of the 7 classifiers within the hierarchy while Ta-
ble 3 shows the results at each tier. Clearly, the perfor-
mance is very high at the first tier, with results of the
combined or frontal channels exceeding 98%. Hence,
classifying between horizontal and vertical eye move-
ments can be done at a very high accuracy using these
channel combinations. If occipital channels are used
instead, the performance is 71.11%.
As the trials flow through the hierarchy, the la-
belling of left vs right trials is done with a higher ac-
curacy than that involving up and down trials. Tak-
ing the frontal channels option as an example, the L
vs R vs O classifier achieved an accuracy of 89.17%
while the U vs D vs O classifier reached 73.82%.
This work further investigated the possibility of dis-
tinguishing between two visual angles, referred to as
near and far, in each of the four directions. The re-
sults of Table 2 show that left and right trials are more
accurately classified as near and far eye movements,
than up and down trials. For the former, classifica-
tion reached 70.83% (left) and 68.06% (right) while
Table 2: Classification accuracies of the 7 classifiers within
the hierarchical structure at combined (C), frontal (F) and
occipital (O) channels.
Scalp Region
C F O
H vs V 98.61% 98.47% 71.11%
L vs R vs O 88.96% 89.17% 50.21%
U vs D vs O 74.40% 73.82% 53.40%
FL vs NL vs O 64.17% 70.83% 53.40%
FR vs NR vs O 65.42% 68.06% 46.25%
FU vs NU vs O 49.24% 52.50% 37.71%
FD vs ND vs O 47.78% 50.97% 37.08%
Exploiting EEG-extracted Eye Movements for a Hybrid SSVEP Home Automation System
119
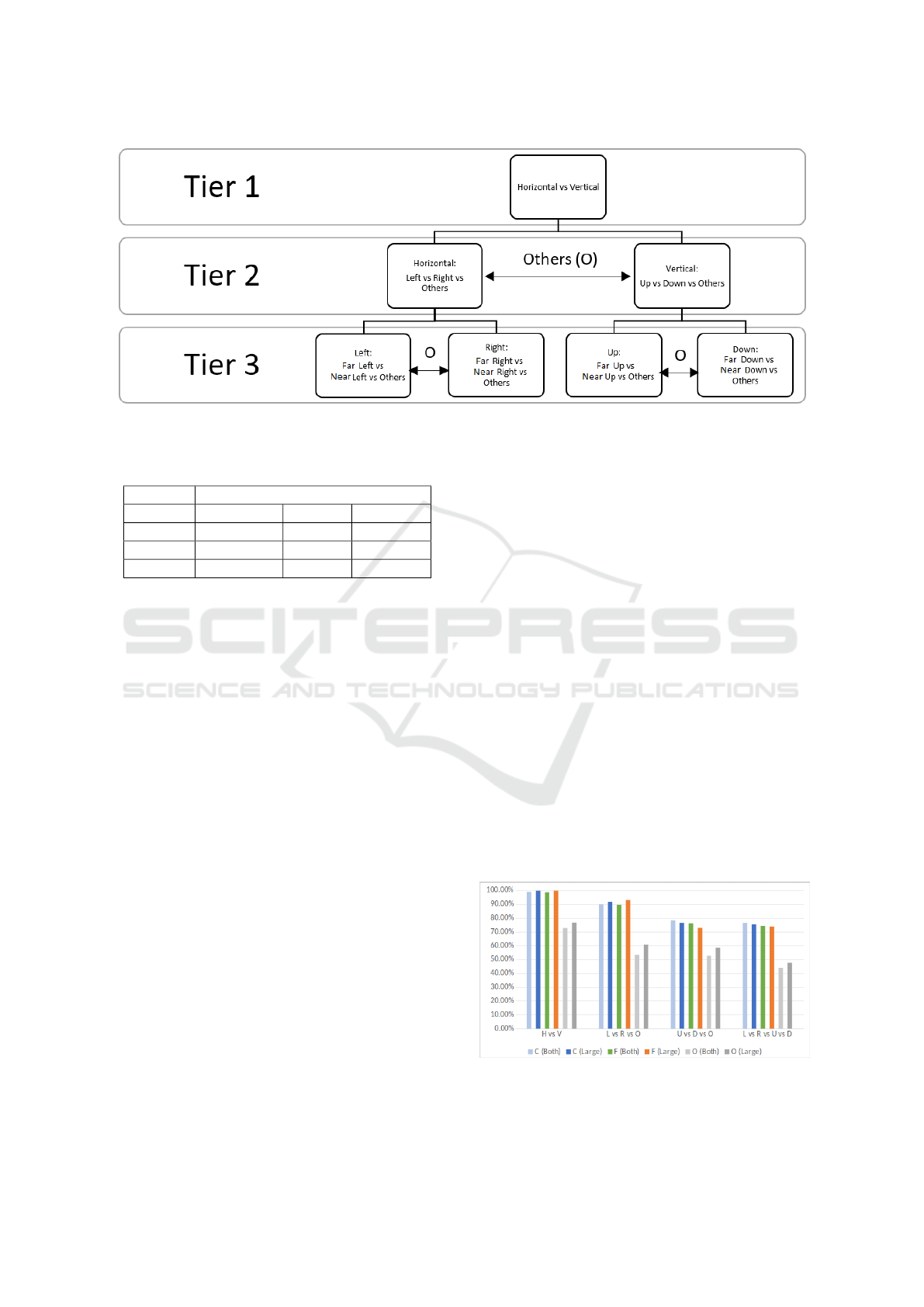
Figure 3: 3-Tiered hierarchical classifier used to classify EEG-based eye movement potentials into one of eight classes.
Table 3: Classification accuracies at each tier of the hierar-
chical classification structure at different scalp regions.
Scalp Region
Combined Frontal Occipital
1st Tier 98.61% 98.47% 71.11%
2nd Tier 76.51% 74.38% 43.85%
3rd Tier 54.87% 58.31% 28.02%
for the latter the performance was of 52.5% (up) and
50.97% (down). Table 3 also gives a clear indication
of how the performance varies across each tier. For
the combined channel option the classification is de-
creasing by around 20% as the number of classes in-
creases from 2 (tier 1), to 4 (tier 2), to 8 (tier 3).
This work also aimed to investigate, for the first
time, at which accuracy can such eye movements
be classified considering only the standard occipital
channels used in an SSVEP-based BCI. These results
show that horizontal and vertical movements can be
classified with an accuracy of over 70% but this per-
formance decreases to around 43% if classification is
carried out between 4 classes, specifically left, right,
up and down. Classifying eye movements based on
the visual angle becomes more challenging from this
set of electrodes with the resulting classification accu-
racy of the third tier going down to 28% among 8 gaze
directions. This means that if such a system is to be
used for a hybrid BCI, recordings from frontal chan-
nels would be highly desirable to boost performance.
The actual number of frontal channels required is fur-
ther analysed in Section 3.3.
3.2 Distinction between Visual Angle
Given that eye movements corresponding to small vi-
sual angles are characterised by small saccadic dis-
placements in the EEG signals, this part of the anal-
ysis investigates whether the performance would im-
prove if trials corresponding to only large visual an-
gles are considered. The hierarchical system would
now only consist of two tiers and involve a distinc-
tion between four classes, specifically left, right, up
and down. The results of this analysis are shown in
Figure 4 and they are being compared to the classi-
fication accuracy obtained when trials of both small
and large visual angles progress through the same two
tiers in the hierarchy. It must be noted that the first
and last block of bar graphs correspond to the classi-
fication at the first and second tier respectively. The
results show that for combined or frontal channels,
the accuracies obtained are comparable for all trials,
with and without the inclusion of small visual angles.
This demonstrates that trials with small visual angles
do not adversely affect the accuracy of detection of
eye movement direction.. However, if occipital chan-
nels only are used, as in a standard SSVEP-based BCI
system, the eye movement accuracies not only de-
crease substantially, but if trials with both small and
large visual angles are used, the performance is sta-
tistically significantly lower than if only trials having
large visual angles are used. These results indicate
Figure 4: Classification accuracies within a two-tier struc-
ture when using trials with both small and large visual an-
gles (‘Both’) and large visual angles only (‘Large’) for the
combined ‘C’, frontal ‘F’ and occipital ‘O’ case.
BIOSIGNALS 2022 - 15th International Conference on Bio-inspired Systems and Signal Processing
120
that occipital channels alone may only be useful, at
most, to distinguish between horizontal and vertical
eye-movements.
3.3 Analysis on the Amount of Frontal
Channels
Table 4 shows the classification accuracies obtained
at the three different scalp regions considering a two-
tiered hierarchy. Using only occipital electrodes, a
classification performance of 47.60% is obtained after
the second tier but the performance of the combined
channels increased to 75.52%. This result however
was obtained by including 11 frontal channels with
the occipital channels. This analysis thus investigated
how eye movement classification performance varies
when reducing the frontal channels according to Table
1. Figure 5 shows that the classification performance
remains very stable even when reducing the number
of frontal channels down to three. This means that
if 3 frontal channels were included with the occipital
channels typical of a standard SSVEP setup, it is pos-
sible to classify eye movements into four classes with
an accuracy of close to 80%. Results using frontal
channels only indicated that a similar performance to
that of Figure 5 could be obtained, with an accuracy
around 80% when using three electrodes. This may
be useful for any type of BCI system which needs to
exploit this eye movement information in four direc-
tions with large visual angles.
4 HYBRID SSVEP HOME
AUTOMATION SYSTEM
Based on the results of the previous sections, a hybrid
SSVEP based home automation system was designed
with the main menu as shown in Figure 6. The com-
mands at the top and bottom of the menu correspond
to TV controls, those on the left control the on/off
switch of a lamp and fan, and those on the right allow
for the opening and closing of the blinds. Five healthy
subjects (three male and two female) participated in
this study. EEG data was recorded at a sampling fre-
quency of 256Hz and based on the results of the previ-
ous sections, eight occipital channels and three frontal
channels were used, specifically O1, Oz , O2 , PO7,
PO3 , POz , PO4 , PO8, AF7, Fpz, and AF8.
4.1 Experimental Paradigm
A comparative analysis was carried out to compare
a hybrid BCI (hBCI) which fuses EEG-based eye-
Table 4: Classification accuracies of the two-tiered hier-
archical system for the combined (C) frontal and occipital
scalp regions, frontal (F) only region and occipital (O) only
region.
Scalp Region
C F O
H vs V 99.58% 99.58% 76.67%
L vs R vs O 91.53% 92.92% 60.56%
U vs D vs O 76.53% 72.92% 58.33%
L vs R vs U vs D 75.52% 73.75% 47.60%
Figure 5: Classification accuracies of four different classi-
fiers when considering 3, 5, 7, or 11 frontal electrodes only.
movement-potentials with SSVEPs, and a conven-
tional SSVEP based BCI. Two types of hybrid BCIs
were designed, specifically a sequential hBCI and a
mixed hBCI. In the former, an eye movement is first
detected and classified as either horizontal or vertical
and the result is used such that only the side or top-
bottom stimuli respectively start flickering. Hence
this reduces the stimuli by half and a final selection
is then made using the SSVEP detection algorithm.
In the mixed hBCI, the attended icon is selected by a
fusion of the SSVEP detection algorithm and the eye-
movement detection algorithm. For comparison pur-
poses, an HCI using only EEG-based eye-movement
potentials was also developed.
Prior to each session, a 72s long training session
was carried out to collect EEG-based eye-movement-
potentials pertaining to four classes (Up, Down, Left
Figure 6: Menu Layout of Smart Home BCI Application.
Exploiting EEG-extracted Eye Movements for a Hybrid SSVEP Home Automation System
121

and Right), matching the interface shown in Figure
6. Four trials of the same length as those shown ear-
lier in Figure 2 were collected for each class and the
training data was used to construct CSP and SVM
models to classify the user’s eye movements within
the hBCI system. No training was required for the
SSVEP-recognition part as an unsupervised learning
technique was used in this case.
Following training the actual experiment was con-
ducted. For the SSVEP-based BCI, 0.75s were allo-
cated for the user to shift the gaze towards the target,
3s were allocated for the flickering of the stimuli, and
finally a 2s feedback period was provided. For the
hBCI, an additional 0.75s were allocated prior to the
gaze shift, instructing the user to focus on a central
cross. Re-centering of the user’s gaze is essential for
correctly classifying the user’s eye movement.
For the EEG-based eye movement only HCI, an
optimal cross layout as shown in Figure 7 was used.
Users were instructed to center their gaze and then
shift their gaze according to the location of the desired
target.
Both offline and online sessions were carried out
for this part of the analysis. In each case an ex-
periment for each of the SSVEP-based BCI, the hB-
CIs and the eye-movement EEG-based HCI was con-
ducted. Each exercise consisted of selecting each
possible icon three times, hence obtaining 24 trials
per experiment. In the online session however, sub-
jects were asked to execute 3 different command se-
quences, specifically:
1. Switch on TV → Close blinds → Decrease TV
volume
2. Open blinds → Switch fan → Increase TV volume
3. Switch lamp → Mute TV → Close blinds
For each command the subject was allowed three
consecutive attempts to correctly select the scheduled
icon. If the user did not manage to generate the nec-
essary SSVEP and the system thus did not succeed
in correctly detecting the target after three attempts,
the application executed the intended command and
progressed on to the following pre-defined cue.
4.2 Algorithms
Three algorithms were needed for the comparative
analysis: (i) An eye-movement classification algo-
rithm which classifies the eye-movements detected;
(ii) an SSVEP classification algorithm which pro-
cesses and classifies the SSVEP response of the sub-
ject; and (iii) a fusion algorithm for the mixed hy-
brid BCI system which fuses the output of the eye-
Figure 7: Interface for the EEG-based eye-gaze HCI.
movement classification algorithm with the SSVEP
classification algorithm.
4.2.1 Eye-movement Classification Algorithm
A similar approach to that discussed in Section 3.1
was adopted here. Specifically the EEG data was fil-
tered with a 4th order IIR bandpass filter having cut-
off frequency at 0.5Hz and 7Hz. The trials were then
projected into CSP space. The natural logarithm was
applied to the variance of the resulting signals and
these were used as features to the SVM classifiers.
Seven pairs of CSP and SVM models, as listed below,
were compiled from the training data obtained from
each user prior to the experiment.
• Horizontal vs Vertical Model
• Left vs Right Model
• Left vs Other Model
• Right vs Other Model
• Up vs Down Model
• Up vs Other Model
• Down vs Other Model
The first pair classifies eye movements as either
horizontal or vertical. This is used to decrease the
number of options within the BCI menu. As shown
in Figure 8, the other six pairs are used to either i)
categorise the horizontal eye movements as leftward
or rightward eye movements ii) categorise the vertical
eye movements as upward or downward eye move-
ments or iii) through the use of the ‘Others’ class at-
tempt to recover trials which are misclassified at the
first tier. As shown in Figure 8, eye-movements la-
belled as ‘Others’ are passed onto the adjacent classi-
fier within the second tier. The SVM models of these
six pairs were modified with a Platt Scaling (Platt,
2000) such that the SVM classifier is converted into a
probabilistic classifier giving a probabilistic estimate
of how much the EEG trial pertains to a specific class.
This conversion is done to aid the SSVEP detection
algorithm within the mixed hBCI.
BIOSIGNALS 2022 - 15th International Conference on Bio-inspired Systems and Signal Processing
122
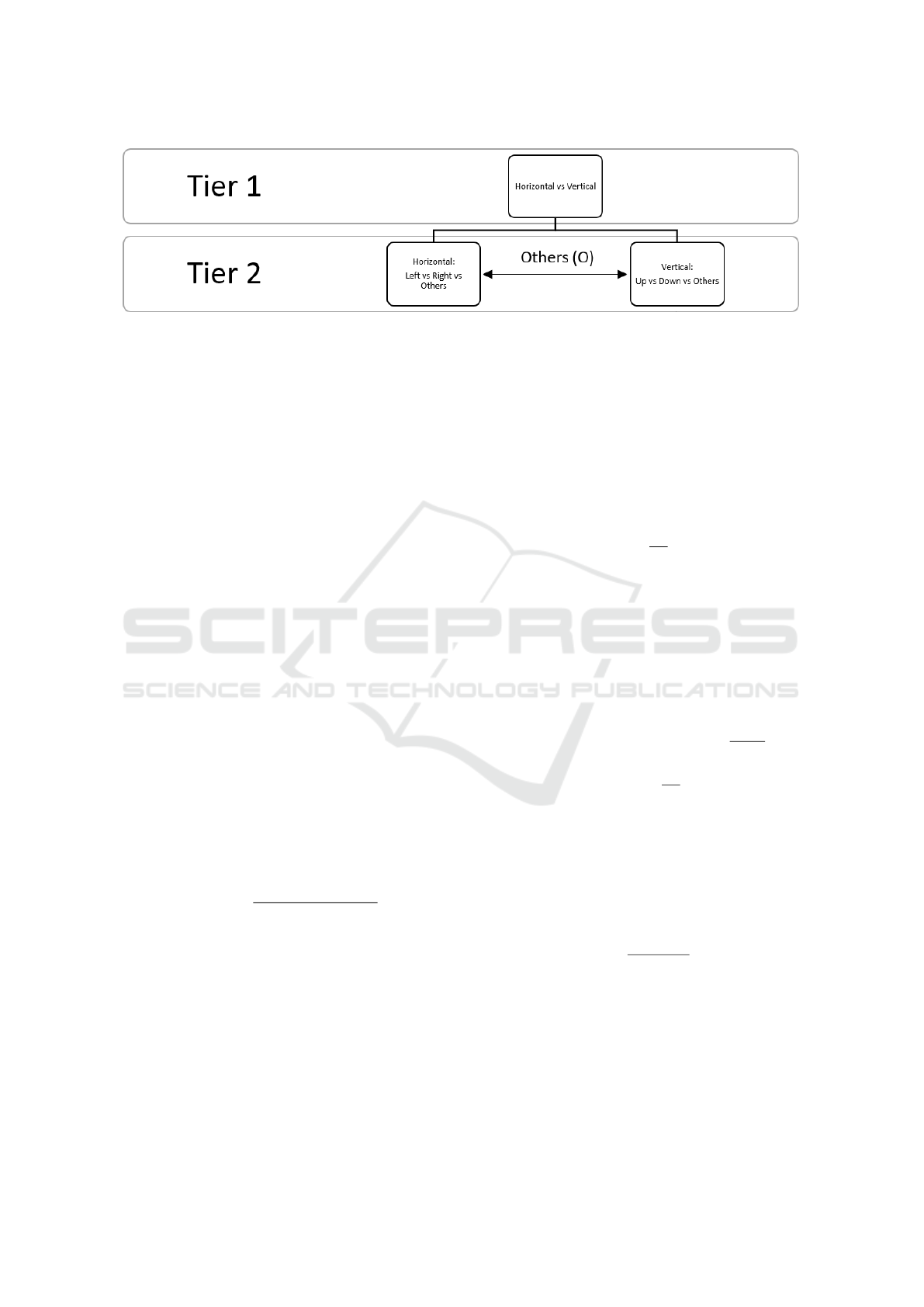
Figure 8: 2-Tiered Hierarchy for Eye-Movement Classification.
4.2.2 SSVEP Classification Algorithm
The filterbank canonical correlation analysis
(FBCCA) (Chen et al., 2015) was used to process
and classify the SSVEP-related EEG obtained from
the user in the online experiments. The FBCCA
algorithm consists of three major procedures: i) fil-
terbank analysis; ii) CCA between SSVEP sub-band
components and sinusoidal reference signals; and iii)
target identification. The design of the sub-bands in
the filter bank was based upon a study by Chen et al.
(Chen et al., 2015) since the bandwidth of stimulation
frequencies used within the online experiments corre-
sponded to that used within the study. The sub-bands
covered multiple harmonic frequency bands. Each
sub-band had a different lower cut-off frequency but
they all shared the same upper cut-off frequency. The
lower cut-off frequency of the n
th
sub-band was set
at n× 8Hz while the upper one was set at 88Hz. An
additional bandwidth of 2Hz was added to both sides
of the passband for each sub-band (Chen et al., 2015).
4.2.3 Fusion Algorithm for the Mixed hBCI
In this case the extended form of Bayes Rule
(Kriegler, 2009), given by Equation 1, was used to
fuse the predictions made by the eye-movement clas-
sification algorithm and the SSVEP-target identifica-
tion algorithm for the mixed hBCI.
P(ω
k
|X) =
P(X|ω
k
)P(ω
k
)
∑
N
j=1
P(X|ω
j
)P(ω
j
)
(1)
where P(ω
k
|X) is the posterior probability of a
specific class ω
k
given the EEG trial X, P(X|ω
k
) is the
class conditional distribution of X for class ω
k
, and
P(ω
k
) is the prior probability of class ω
k
, the initial
degree of belief in the class ω
k
. The prior probability
is computed by the SVM classifier modified by Platt
scaling while P(X|ω
k
) is computed from the FBCCA
algorithm by modelling the probability distribution of
the correlation given the class.
4.2.4 Performance Metrics
To evaluate the performance of the different BCI sys-
tems considered in this work, the classification accu-
racy, information transfer rate (ITR) and efficiency
were used, all of which are common metrics in this
domain. The classification accuracy determines how
often a correct selection is made by the BCI and is
computed by (Stawicki et al., 2017):
P =
N
c
C
N
(2)
where N
c
and C
N
denote the number of correct
classifications and the total number of classified com-
mands.
The ITR, also known as bit rate, takes into con-
sideration the speed of the BCI system and together
with accuracy, gives a clearer picture of the system
throughput. The ITR in bits/minute is calculated as
(Stawicki et al., 2017):
B = log
2
N + P log
2
P + (1 − P)log
2
1 − P
N − 1
(3)
ITR = B
C
N
T
(4)
where B represents the number of bits per trial and
T denotes the length of the trial in minutes.
Finally, the efficiency metric gives a measure of
the efficiency of the BCI system, taking into consid-
eration the cost of errors. The efficiency in terms of
the actual time taken, t, to complete a task, is calcu-
lated as (Zerafa, 2013):
η =
t
max
−t
t
max
−t
min
(5)
The minimum t
min
and t
max
time that a user could
take to complete a task are computed by:
t
min/max
= κ ×t
o
× α (6)
where κ denotes the number of commands re-
quired to complete a task, t
o
represents the fixed time
between two consecutive commands for the system to
detect an SSVEP, while α denotes the number of user
attempts to execute the correct command.
Exploiting EEG-extracted Eye Movements for a Hybrid SSVEP Home Automation System
123

Table 5: Performance Results of Offline Analysis Across all Subjects.
Method: SSVEP Sequential Hybrid Mixed Hybrid Eye-Gaze HCI
Metrics: Acc(%) ITR (bpm) Acc (%) ITR (bpm) Acc (%) ITR (bpm) Acc (%) ITR (bpm)
S01 83.33 30.11 91.67 31.36 75 19.83 41.67 15.3
S02 41.67 6.12 62.5 13.24 75 19.83 41.67 15.3
S03 87.5 33.69 100 40 70.83 17.47 41.67 15.3
S04 87.5 33.69 95.83 35.11 62.5 13.24 20.83 1.57
S05 45.83 7.75 62.5 13.24 37.5 3.88 16.67 0.42
Mean 69.16 16.17 82.5 19.06 64.16 11.32 32.5 9.58
4.3 Results for the Offline Analysis
The results of the offline analysis are quantified in
terms of the classification accuracy and ITR. The re-
sults presented in Table 5 show that the highest clas-
sification accuracy obtained within the SSVEP-based
BCI was that of 87.5% with a high ITR of 33.69
bpm. For the sequential hBCI, a high classification
accuracy of 100% was achieved with a corresponding
ITR of 40bpm, while for the mixed hBCI, the high-
est classification accuracy achieved was that of 75%
with an ITR of 19.83 bpm. As for the EEG-based
eye-gaze HCI, the highest performance obtained was
with a classification accuracy of 41.67% and an ITR
of 15.3bpm. On average, the best performance was
achieved by the sequential hBCI with an average ac-
curacy of 82.5% and an ITR of 19.06 bpm.
With the exception of Subject 2, although differ-
ences in performance were noted, in general, sub-
jects achieved their best performance for the sequen-
tial hBCI. Conversely, Subject 2 obtained poor re-
sults with an SSVEP-based BCI and achieved the best
performance when using the mixed hybrid BCI, thus
demonstrating the strength of this hBCI configuration
when the SSVEP response of a subject is weak.
A considerable drop in performance was noted for
the EEG-based eye-gaze HCI, indicating that the clas-
Figure 9: Classification Accuracies of Different BCI Archi-
tectures against Varying Stimulating Periods.
sification of EEG-based eye-movements, according to
their visual angle extent, hinders the performance of
an HCI system. In addition, the drop in performance
attributes to the absence of SSVEP recognition tech-
niques within the HCI.
Figures 9 and 10 show the relation between the
classification accuracy and ITR, respectively, and the
stimulating period. As the stimulus flickering time
is reduced from 3 s down to 1 s, the SSVEP-based
BCI, the sequential hBCI and the mixed hBCI all dis-
play a reduction in accuracy, with the SSVEP-based
BCI and the mixed hBCI suffering the highest and
lowest reduction, respectively. It may also be noted
that the sequential hBCI remains the best performing
BCI throughout. With a stimulus period of 0.5s, the
SSVEP is normally difficult to detect; therefore, it is
not surprising that for this stimulus period, the mixed
hBCI has the highest performance, albeit at around
35%, indicating that the strength of this hBCI config-
uration is mainly due to the separate eye-movement
detection. Similarly, for this lowest stimulus period,
the EEG-based eye-gaze HCI also outperformed the
sequential hBCI and the SSVEP-based BCI.
With regard to the ITR, as the stimulus flickering
time is reduced from 3 seconds down to 1 second,
the performance of the SSVEP-based BCI decreases
monotonically. Conversely, the ITR of the sequential
Figure 10: ITRs of Different BCI Architectures against
Varying Stimulating Periods.
BIOSIGNALS 2022 - 15th International Conference on Bio-inspired Systems and Signal Processing
124
hBCI and the mixed hBCI tend to remain steady, even
exhibiting a slight increase, down to a stimulus period
of 1.5 s, with a noticeable but small reduction at 1 s.
Similar to the accuracy trends, the sequential hBCI
always has the best ITR throughout and at a stimu-
lus period of 0.5 s, both the SSVEP-based BCI and
the sequential hBCI exhibit a large drop in ITR, with
the mixed hBCI exhibits the highest ITR at a mere 9
bpm. The EEG-based eye-gaze HCI exhibits an ITR
of 6bpm and, similar to the accuracy, for a stimulus
period of 0.5s, this HCI outperforms the sequential
hBCI and the SSVEP-based BCI.
From the classification accuracy and ITR results
of the offline comparative analysis it was concluded
that a stimulation period of 2s is an adequate time
window and hence, for the online experiment, whose
results are presented in the next section, the stimulat-
ing period was set to 2s.
4.4 Results for the Online Analysis
An online experiment was conducted to allow the sub-
jects to operate the smart home BCI using either an
SSVEP-based BCI architecture, a sequential hBCI ar-
chitecture or a mixed hBCI architecture. In contrast
with the offline analysis, apart from classification ac-
curacy and ITR, the performance of the three smart
home BCI systems is also quantified in terms of effi-
ciency. As the online experiment grants each subject a
number of attempts to complete a task, the efficiency
evaluation criteria was introduced to take this number
into consideration.
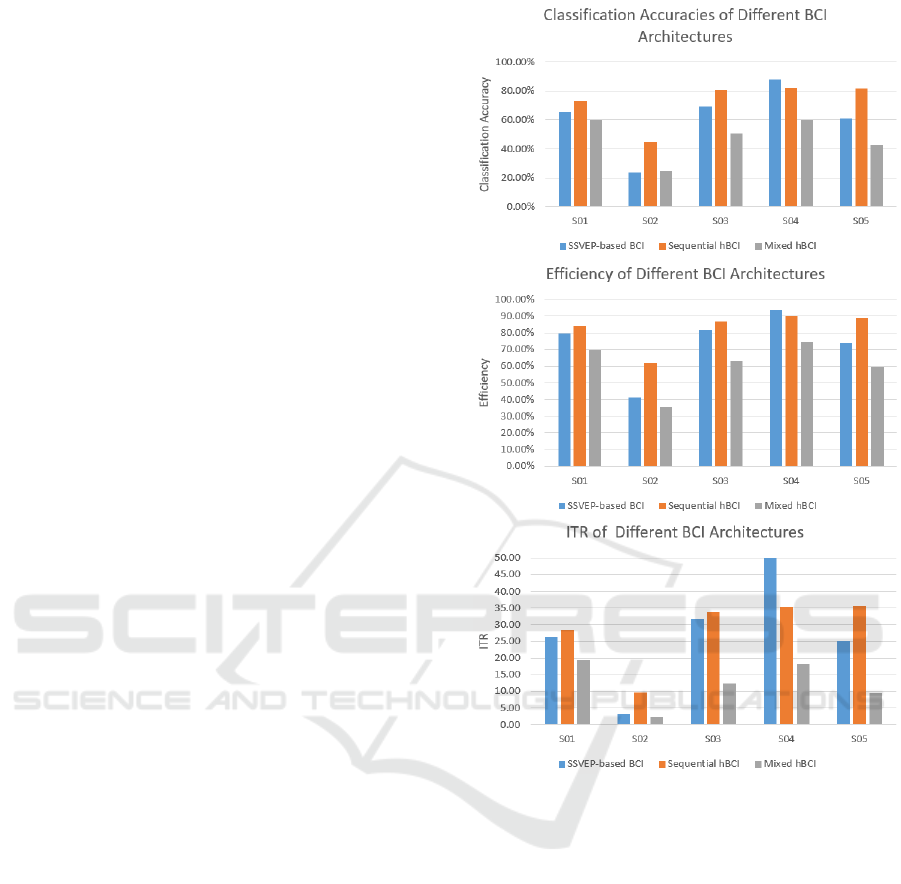
Figure 11 illustrates the performance achieved by
each subject for each BCI architecture on the basis of
classification accuracy, efficiency and ITR. With the
exception of Subject 4, subjects achieved their best
performance when using the sequential hybrid BCI.
Furthermore, relative to the mixed hybird BCI, sub-
jects achieved better results when using the SSVEP-
based BCI. However, as can be seen in the top bar
plot of Figure 11, Subject 2, who achieved poor re-
sults with an SSVEP-based BCI, achieved a slightly
higher classification accuracy when using a mixed hy-
brid BCI, demonstrating once more the advantages of
hBCI configurations when the SSVEP response of a
subject is weak.
When averaging the classification accuracy, ITR
and efficiency across the subjects for each smart home
BCI architecture, results showed that the sequential
hBCI outperformed the other two systems on all per-
formance metrics. The sequential hBCI was found to
be 11.3% more accurate and 8.3% more efficient than
the smart home SSVEP-based BCI. Pairwise t-tests
showed that the differences between the two systems
Figure 11: Performance Metrics for the Three Different BCI
Architectures across Five Different Subjects.
were significant (p-value < 0.01 for both metrics). In
terms of ITR, a slight difference of 1bpm was found
between the two, in favour of the smart home sequen-
tial hBCI. However, this was not found to be statisti-
cally significant. The smart home sequential hBCI ex-
ceeded the accuracy, efficiency and ITR of the mixed
hBCI by 25.1%, 21.9% and 16.21 bpm respectively
and the differences between these two smart home
hybrid BCIs were also found to be statistically sig-
nificant (p < 0.01).
The subjects taking part in the online study were
also asked to fill in a questionnaire to be able to com-
pare the different systems based on the user’s feed-
back. Overall users found the systems easy to con-
trol with the smart home sequential hBCI reported
as being the easiest. In terms of concentration re-
quirements, in general subjects found no difference
between the three systems. Users perceived the se-
Exploiting EEG-extracted Eye Movements for a Hybrid SSVEP Home Automation System
125

quential hBCI system as the least erroneous and the
mixed hBCI as the most erroneous. This correlates
with the quantitative results discussed earlier.
Users perceived the flickering stimuli of the hy-
brid systems to be less than that of the SSVEP-based
BCI. This may be attributed to the fact that the hybrid
systems makes use of four flickering stimuli instead
of eight. In fact, users found the hybrid systems to be
less tiring than the SSVEP-based BCI. Overall users
agreed that the time taken to make a selection was ap-
propriate for all systems. With regards to smart home
system features, all subjects stated that the menu in-
terface was easy to get used to and that it was adequate
for a smart home system.
5 CONCLUSIONS
This work concluded that eye movements can be clas-
sified reliably into horizontal or vertical eye move-
ments, using frontal EEG channels, with an accu-
racy of 98.47%. For the second tier in the proposed
hierarchical structure, classification into left, right,
up or down eye movements reached an accuracy of
74.38%. Finally, the eye movements could be clas-
sified into the eight considered saccadic gaze angle,
with an accuracy of 58.31%. These results compare
well with the limited literature in this field. Specifi-
cally (Dietriech M. P., 2017) had obtained a classifi-
cation of 96.6% when classifying between 4 extreme
eye movements (up, down, left, right) and the central
location using a kNN classifier, and 58.4% when us-
ing a linear SVM classifier. This however was only
based on a single subject as opposed to our work
which was validated on 5 subjects.
The results presented in this paper also show that
reliable eye-movement information may also be ex-
tracted using only the occipital EEG channels, though
with lower accuracies. Specifically classification into
horizontal or vertical eye movements reached an ac-
curacy of 71.11% while classification in the second
and third tiers of the proposed hierarchical structure
dropped to 43.85% and 28.02% respectively. How-
ever, if three frontal channels are added to the occipi-
tal channels vertical and horizontal eye movements at
large visual angles may be distinguished with an ac-
curacy close to 80% using the proposed hierarchical
classifier.
These results were then used for the develop-
ment of a smart home automation system where eye
movement information occurring prior to the visu-
ally evoked potential was exploited to improve clas-
sification performance of a hybrid BCI. An offline
study showed that a sequential hBCI gave an aver-
age accuracy over 5 subjects of 82.5% and an ITR
of 19.06bpm, while the mixed hBCI and the SSVEP-
based BCI gave an accuracy of 64.16% and 69.16%
respectively, and an ITR of 11.32bpm and 16.17bpm
respectively. The results of the online automation sys-
tem also confirmed that users performed better with
the sequential hBCI and users found this more intu-
itive to control. These results show that eye move-
ment information extracted from standard EEG chan-
nels typically used in an SSVEP based BCI can pro-
vide relevant information which improves the classi-
fication performance, especially for subjects whose
SSVEP response is not very strong.
ACKNOWLEDGEMENTS
This work was partially supported through the Project
R&I-2015-032-T ‘BrainApp’ financed by the Malta
Council for Science & Technology, for and on be-
half of the Foundation for Science and Technology,
through the FUSION: R&I Technology Development
Programme.
REFERENCES
Belkacem, A., Hirose, H., Yoshimura, N., Shin, D., and
Koike, Y. (2013). Classification of four eye directions
from eeg signals for eye-move-based communication
system. J Med Biol Eng, 34:581–588.
Belkacem, A., Saetia, S., Zintus-art, K., Shin, D., Kam-
bara, H., Yoshimura, N., Berrached, N., and Koike,
Y. (2015). Real-time control of a video game using
eye-movements and two temporal eeg sensors. Com-
putational Intelligence and Neuroscience.
Bishop, C. (2006). Pattern Recognition and Machine
Learning. Springer.
Chen, X., Wang, Y., Gao, S., Jung, T., and Gao, X. (2015).
Filter bank canonical correlation analysis for imple-
menting a high-speed ssvep-based brain-computer in-
terface. Journal of Neural Engineering, 12(4).
Dietriech M. P., Winterfeldt G., V. M. S. (2017). Towards
eeg-based eye-tracking for interaction design in head-
mounted devices. 7th International Conference on
Consumer Electronics (ICCE).
Gupta, S., Soman, S., Raj, P., Prakash, R., Sailaja, S., and
Borgohain, R. (2012). Detecting of eye movements in
eeg for controlling devices. IEEE Int. Conf. on Com-
putational Intelligence & Cybernetics.
Hsieh, C., Chu, H., and Huang, Y. (2014). An hmm-based
eye movement detection system using eeg brain-
computer interface. IEEE International Symposium
on Circuits and System.
Johannes M. G., Pfurtscheller G., F. H. (1999). Design-
ing optimal spatial filters for single-trial eeg classifi-
BIOSIGNALS 2022 - 15th International Conference on Bio-inspired Systems and Signal Processing
126

cation in a movement task. Clinical neurophysiology,
110(5):787–798.
Kriegler, E. (2009). Updating under unknown unknowns:
An extension of bayes’ rule. International Journal of
Approximate Reasoning, 50(4):583–596.
Padfield, N. (2017). Development of a hybrid human
computer interface system using ssveps and eye gaze
tracking. Master’s thesis, University of Malta.
Peirce, J., Gray, J. R., Simpson, S., MacAskill, M.,
H
¨
ochenberger, R., Sogo, H., Kastman, E., and Lin-
deløv, J. K. (2019). Psychopy2: Experiments in be-
havior made easy. Behavior research methods.
Platt, J. (2000). Probabilistic outputs for support vector
machines and comparisons to regularized likelihood
methods. Adv. Large Margin Classif., 10.
Ramoser, H., Muller-Gerking, J., and Pfurtscheller, G.
(2000). Optimal spatial filtering of single trial eeg dur-
ing imagined hand movement. IEEE transactions on
rehabilitation engineering, 8(4):441–446.
Saravanakumar, D., R. R. M. (2018). A visual keyboard
system using hybrid dual frequency ssvep based brain
computer interface with vog integration. In Interna-
tional Conference on Cyberworlds.
Stawicki, P., Gembler, F., Rezeika, A., and Volosyak, I.
(2017). A novel hybrid mental spelling application
based on eye tracking and ssvep-based bci. Brain Sci-
ences, 4.
Zerafa, R. (2013). Ssvep-based brain computer interface
(bci) system for a real-time application. Master’s the-
sis, University of Malta.
Exploiting EEG-extracted Eye Movements for a Hybrid SSVEP Home Automation System
127
