
High Resolution Mask R-CNN-based Damage Detection on Titanium
Nitride Coated Milling Tools for Condition Monitoring by using a New
Illumination Technique
Mühenad Bilal
1 a
, Sunil Kancharana
1 b
, Christian Mayer
1
, Daniel Pfaller
1
, Leonid Koval
1 c
,
Markus Bregulla
1
, Rafal Cupek
2 d
and Adam Zi˛ebi
´
nski
2 e
1
Technische Hochschule Ingolstadt, Esplanade 10, Ingolstadt 85057, Germany
2
Silesian University of Technology, Institute of Informatics, Gliwice, Poland
Keywords:
Predictive Maintenance, Machine Learning, Damage Detection, Illumination Source, Mask R-CNN.
Abstract:
The implementation of intelligent software in the manufacturing industry is a technology of growing impor-
tance and has highlighted the need for improvement in automatization, production, inspection, and quality
assurance. An automated inspection system based on deep learning methods can help to enhance inspec-
tion and provide a consistent overview of the production line. Camera-based imaging systems are among the
most widely used tools, replacing manual industrial quality control tasks. Moreover, an automatized damage
detection system on milling tools can be employed in quality control during the coating process and to sim-
plify measuring tool life. Deep Convolutional Neural Networks (DCNNs) are state-of-the-art methods used
to extract visual features and classify objects. Hence, there is great interest in applying DCNN in damage
detection and classification. However, training a DCNN model on Titanium-Nitride coated (TiN) milling tools
is extremely challenging. Due to the coating, the optical properties such as reflection and light scattering on
the milling tool surface make image capturing for computer vision tasks quite challenging. In addition to the
reflection and scattering, the helical-shaped surface of the cutting tools creates shadows, preventing the neural
network from efficient training and damage detection. Here, in the context of applying an automatized deep
learning-based method to detect damages on coated milling tools for quality control, the light has been shed on
a novel illumination technique that allows capturing high-quality images which makes efficient damage detec-
tion for condition monitoring and quality control reliable. The method is outlined along with results obtained
in training a ResNet 50 and ResNet 101 model reaching an overall accuracy of 83% from a dataset containing
bounding box annotated damages. For instance and semantic segmentation, the state-of-the-art framework
Mask R-CNN is employed.
1 INTRODUCTION
Machining Process Monitoring(MPM) (Liang et al.,
2004) plays an important role in reducing cost, en-
suring greater product variability, and improving
manufacturing productivity and reliability (Caggiano,
2018). Monitoring of the production process (Cu-
pek et al., 2015), production variants (Cupek et al.,
2018; Yli-Ojanperä et al., 2019) and other parameters
a
https://orcid.org/0000-0003-4065-8467
b
https://orcid.org/0000-0002-0718-6480
c
https://orcid.org/0000-0003-4845-6579
d
https://orcid.org/0000-0001-8479-5725
e
https://orcid.org/0000-0003-4554-6667
such as current supply (Grzechca et al., 2017; Yingjie,
2014) and even speed of the engines are of growing
importance to provide real-time data for manufactur-
ers. Moreover, there is a vital demand for Tool Con-
dition Monitoring (TCM) (Short and Twiddle, 2019),
especially when it comes to evaluating the milling
process regarding tool wear and the resultant surface
roughness.
• Break-in
• Normal wear
• Abnormal wear
Coating can increase the durability of cutting tools
by 10-12 times (Spišák and Majernikova, 2017). In
Bilal, M., Kancharana, S., Mayer, C., Pfaller, D., Koval, L., Bregulla, M., Cupek, R. and Zi˛ebi
´
nski, A.
High Resolution Mask R-CNN-based Damage Detection on Titanium Nitride Coated Milling Tools for Condition Monitoring by using a New Illumination Technique.
DOI: 10.5220/0010781800003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
305-314
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
305

almost all micro-size industries, digital image pro-
cessing techniques are used as a measurement of
quality assurance (Chen and Lee, 2010). Using an
Imaging System(IS) for damage detection on coated
milling tools is accompanied by many difficulties
such as high damage density, low contrast intensity,
in-homogeneity, and damage shape variations. Also,
weak boundaries and strong gradient on the tool con-
tours that overlap with the damages can decrease the
detection accuracy. Additionally, due to the complex
geometry of the cutting tools, a deficient illumination
uniformity results in large intensity variation of dif-
ferent image regions, making training a DCNN model
insufficient for inspection applications. To overcome
these difficulties, a new illumination technique to en-
sure uniform illumination for capturing high qual-
ity images for computer visions tasks such as object
detection and semantic segmentation was developed.
Additionally, using these images can improve and ac-
celerate training DCNN models, increasing damage
detection accuracy. To our best knowledge this is
the first work, in which an object with optical crit-
ical properties is inserted into a Cylindrical Shaped
Enclosure (CSE) to capture high quality images for
object detection, instance segmentation and pixelwise
damage detection tasks.
The object detection algorithms have been contin-
uously improved by the computer vision community.
Parts of this advanced technique have been driven
by popular object detection algorithms like SSD (Liu
et al., 2016), R-CNN (Girshick et al., 2014), Fast R-
CNN (Girshick, 2015), Faster R-CNN (Ren et al.,
2015) and YOLO (Redmon et al., 2016). For the
automatic damage recognition and localization, the
state-of-the-art target detection framework Mask-R-
CNN was employed, which extends Faster R-CNN by
adding a branch for predicting segmentation masks on
each Region of Interest (RoI) and a branch for classi-
fication and bounding box simultaneously. The mask
is a fully convolutional network that takes an image of
arbitrary size as input and produces sized output with
efficient inference and learning for each RoI, predict-
ing a segmentation mask in a pixel-to-pixel manner by
adding only a small fraction of computational over-
head to Faster R-CNN. This enables a fast system and
rapid experimentation.
In the first stage, Mask R-CNN uses a Region Pro-
posal Net (RPN) network (Girshick et al., 2014) to
generate a sparse set of rectangle proposals (Faster,
2015). Each proposal represents a RoI on the feature
maps indicating whether there is a target or not. Using
RoI-Pooling in the next step, the feature extraction of
each proposal from a CNN feature map is performed.
Finally, the two processing branches mentioned above
classify the object and predict the masks. The mask
prediction indicates whether the pixels lies in the pre-
dicted bounding box of the objects or not.
Additionally, the Faster R-CNN includes an Fea-
ture Pyramid Networks (FPN), which combines low-
resolution, semantically strong features with high-
resolution, semantically weak features via a top-down
architecture with lateral connection to build an in-
network feature pyramid from single scale input. This
results in excellent gains in both accuracy and speed
(Tsung-Yi Lin et al., 2017). Moreover, the FPN can
enhance small damage detection below 30 µ by just
using a standard commercial camera system.
This paper is focused on coated cutting tools,
which are widely used in the milling industry. Due
to the increased demand for all kinds of high preci-
sion and high accuracy cutting tools determining the
wear or damages of cutting edges is of great impor-
tance (Schulz and Moriwaki, 1992). For this purpose,
a DCNN based tool measuring and inspection sys-
tem for determining the wear condition of the cutting
edges and coating homogeneity will definitely sup-
port tool manufactures as well as machining process.
The main steps and aim of this paper can be sum-
marized as follows:
1. Use of Cylindrical Shaped Enclosure (CSE) for
capturing high-quality images to avoid unwanted
reflection and ensure homogeneous illumination
on the optical-critical components.
2. Preprocessing the data by cropping each image
into 36 small image fractions to improve the per-
formance of the DCNN model. In addition to this,
the cropped images will support the FPN to detect
small damages.
3. Due to the high image quality, few annotated im-
ages are used to train the model and perform high-
accuracy damage detection.
4. Predicting damages on the cropped images and
merging them to reconstruct the original image
with the corresponding damages.
5. Fine tune the model by modifying the hyper pa-
rameter such as the area of anchor boxes with var-
ious backbones.
The rest of the paper is structured as follows: The
measurement apparatus is described in section 2. Sec-
tion 3 explains the method using Mask R-CNN algo-
rithm followed by section 4 which includes experi-
mental results and analysis. The paper is ended with
conclusion as section 5.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
306
2 IMAGE ACQUISITION OF
MILLING TOOLS WITH
CYLINDRICAL SHAPED
ENCLOSURE MEASUREMENT
SETUP
The proposed measurement setup (see Figure 1) has
been filed for an (EU) European patent. It consists
of a cylindrical shaped enclosure (CSE) whose inner
walls are coated with Barium Sulfate (BaSO4) to en-
hance multi-light scattering. This idea is inspired by
a conventional integrating sphere, which is used as a
light source with a uniform luminance field at the exit
port and also as a uniform illumination field at var-
ious distances for photo metric and radiometric ap-
plications (Liu et al., 2015). For uniform distribu-
tion of light 14 multi-spectral Light Emitting Diodes
(LED) are distributed uniformly around the circum-
ference of CSE. Diffusion disks in front of the LED
are mounted. The measurement setup also consists
of a camera system which has a commercial camera
along with a slider. The slider helps in adjusting the
focal length of the lens according to the tool length.
This unique and innovative light source can be used
for various computer vision tasks such as object de-
tection and semantic segmentation. A rotation plate
is located below CSE to ensure that images are cap-
tured in a sequence of 15° so that, the entire 360° view
of the tool is obtained.
Figure 1: Measurement setup for image acquisition of com-
ponents with high reflection co-efficient and complex heli-
cal shaped structures.
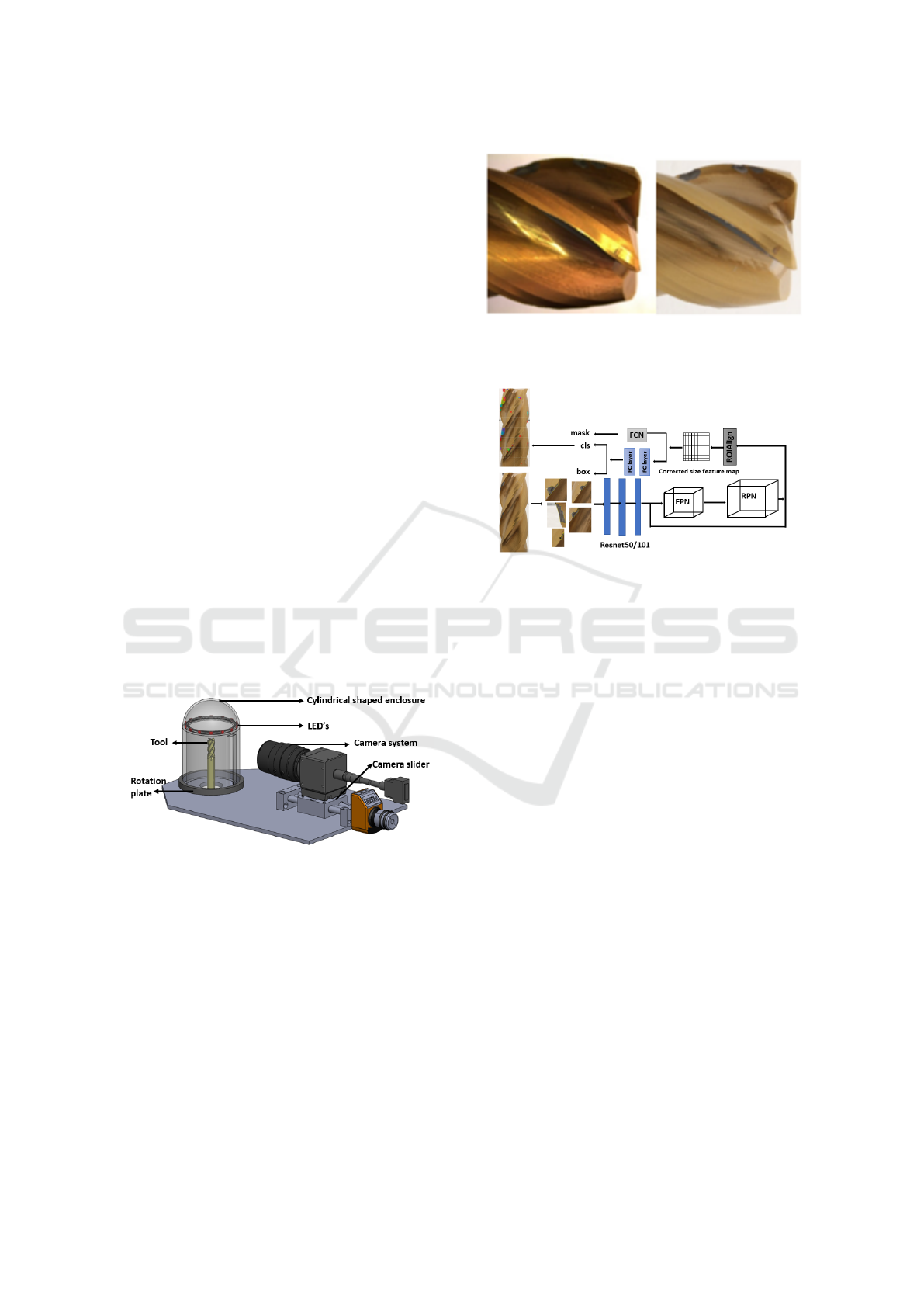
The proposed measurement allows to capture
high-quality images without any reflections. To
prove the mentioned point, a TiN coated milling tool
was captured using the proposed measurement setup
and normal illumination conditions without any con-
trolled environment. The difference can be observed
in the Figure 2
Figure 2: Comparing the images of the same tool captured
using normal illumination conditions(left) and the proposed
measurement setup.
Figure 3: The Mask R-CNN framework for instance seg-
mentation used for high resolution damage detection on
milling tools.
3 METHOD USING MASK R-CNN
ALGORITHM
The objective of this work is to develop a method to
capture high quality images of milling tools with TiN
coating to detect and segment damages on these tools
by using the state-of-the-art segmentation and object
detection framework Mask R-CNN.
Figure 3 illustrates the architecture of Mask R-
CNN. Mask R-CNN has three outputs, a class la-
bel, bounding box, and object mask. It consists of a
backbone network for generating multi-scale features
maps, FPN to enhance extracting semantic and ab-
stract information from the feature maps, RPN mod-
ule for generating a plenty of region proposals for re-
fining bounding boxes and a mask head for generating
binary masks of the objects in out cases the damages
occur on the drilling tools.
The working principle of our proposed Mask R-
CNN based algorithm can be described step-wise as
follows:
1. Capture high quality images by using our mea-
surement setup, described in Figure 1.
2. Generate a data set by cropping each image to
small fraction of 36 images and assign each im-
age to an element of an 9x4 matrix. This step pre-
High Resolution Mask R-CNN-based Damage Detection on Titanium Nitride Coated Milling Tools for Condition Monitoring by using a
New Illumination Technique
307

vents losing of spatial information and enhances
training feature extraction by FPN and reduces the
training and test time.
3. Feed the cropped image to a residual network
ResNet101 or ResNet50 with FPN for enhancing
feature extraction to generate feature maps.
4. The feature map is then scanned by the RPN
network with a sliding window, looking for the
potential candidate for generating proposals with
different sizes and aspect ratios.
5. Now the feature maps obtained from the RPN pos-
sess large number of framed candidates as pro-
posals. The next step is to use softmax classifier,
frame regression and non-maximum suppression
to discard inaccurate proposals and remain only
top-scoring predictions as RoI’s for the next step.
6. The remaining Region of Interest (RoI) on the fea-
ture maps are then sent to the Region of Inter-
est Alignment layer (RoIAlign layer) to perform
pooling and quantization on RoI thereby a fixed
size of feature map for each proposal is generated.
7. The new feature map undergoes the two branches
as mentioned above. The first one is a fully con-
nected layer for object classification and frame re-
gression and the second branch is a fully convolu-
tional network for pixel segmentation and mask
prediction.
8. Finally, the damages on each cropped image were
obtained. Since the cropped images have been as-
signed to a 4×9 matrix the cropped images can
be merged together to depict the damages marked
with bounding boxes, scores and masks.
3.1 Related Work
In this section, an introduction of the DCNN with
special emphasis on the Region Based Object Detec-
tion (RBOD) and Semantic Segmentation (SS) meth-
ods is provided. Several research studies have been
undertaken to develop an DCNN for locating class-
specific and class agnostic bounding boxes (Szegedy
et al., 2013; Szegedy et al., 2014; Erhan et al., 2014).
Fully-Connected layer (FC) has been used to train a
model for predicting a box with special coordinates
to localize single objects and for detecting multiple
class-specific tasks (Sermanet et al., 2014). These
techniques have been employed for the region-based
CNN (R-CNN) object detection approach (Girshick
et al., 2014). Using R-CNN Girshick et al were able to
present a simple and scalable detection algorithm that
improves mAP on PASCAL VOC 2012 dataset by
more than 30%. R-CNN lacks of computation shar-
ing, resulting in slow convolutional operations perfor-
mance in forward pass for each object, resulting in a
high training time and test time as well. R-CNN com-
bined with spatial pyramid pooling networks (SPP-
nets) can speed up R-CNN by sharing computation
power up to 100 times at test time and 3 times at train-
ing time (He et al., 2015). SPPnets has still some
drawbacks. During fine-tuning the SPPnets cannot
update the convolutional layers that proceed the spa-
tial pyramid pooling and decrease the accuracy of
DCNN. To overcome the disadvantages of R-CNN
and SPPnet Girshick et al. introduced Fast R-CNN
(Girshick, 2015) as an extension of R-CNN, which
then extended by Faster R-CNN in 2017 (Ren et al.,
2017). Fast R-CNN is faster than R-CNN and pre-
cedes training on VOC07 dataset 9 times faster than
R-CNN (Girshick, 2015). Faster R-CNN is flexible
and robust two-stage system and considered to be the
leading frame work in several benchmarks (Tsung-
Yi Lin et al., 2017; Shrivastava et al., 2016). The
common idea behind Faster R-CNN is to use con-
volutional feature map generated by a DCNN (e.g.
Resnet) to determine region proposals with different
anchor sizes by using sliding windows for feature ex-
traction, whereas Fast R-CNN takes an input as an
entire image with a set of object proposals, which are
extracted by a region of interest pooling layers.
Applying instance segmentation and object detec-
tion tasks simultaneously proves to be challenging,
because it requires correct detection of all objects in
the image and segmenting each instance of the ob-
ject consecutively. The computer vision community
has improved beside object detection semantic seg-
mentation tasks separately. In large part, this have
been driven by powerful baseline systems, which are
based on segment proposals methods (Girshick et al.,
2014; Hariharan et al., 2014; Hariharan et al., 2017).
Jonathan Long et al. defined a fully convolutional net-
work (FCN) for segmentation. FCN combines layers
of the feature hierarchy and refines the spatial preci-
sion of the output at the same time (Shrivastava et al.,
2016). Deep Mask (DM) model with two branches
has been introduced by (Pinheiro et al., 2015). For
high quality object segmentation the masks use only
the upper-layer to extract CNN features and predict
the likelihood of that segmented object. To improve
the object segmentation masks, and increase the pixel
segmentation accuracy a deep learning approaches
based on augmentation feedforward networks with
top-down refinement, called SharpMask, has been
proposed in 2016 (Pinheiro et al., 2016).
Mask- R-CNN has been introduced by (He et al.,
2017; Nur Ömero
˘
glu et al., 2019) to extend Faster R-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
308

CNN by adding a second branch for predicting object
mask beside the exiting branch for bounding box re-
gression, adding only a small overhead to Faster R-
CNN. Since that time, Mask-R-CNN based methods
for object detection and classification task have been
widely used to determine the category and localiza-
tion of multiclass objects, e.g., to identify and seg-
ment polyps in the colonoscopy images (Kang and
Gwak, 2019), detect ships on high resolution sensing
images (You et al., 2019), quantification of blueber-
ries in the wilds (Gonzalez et al., 2019) and for a vari-
ety of practical damage detection application (Zhang
et al., 2020).
3.2 Different Backbones of Mask
R-CNN
In this section the ResNet Backbone used in Mask R-
CNN is discussed. The residual backbone networks
ResNet101 and ResNet50 have been used. While
ResNet101 consists of 101 layers, ResNet50 consists
of 50 layers. Both networks combine FPN to get fea-
ture maps of four levels P2, P3, P4, P5 corresponding
to last residual block for the conv2, conv3, conv4 and
conv5 outputs (Tsung-Yi Lin et al., 2017). Thus the
proposed backbone enhances in extracting damages
with different scale.
3.3 The Improvement of Detection
Accuracy by Adjusting RPN
The region-based detector RPN has been used in Fast
R-CNN, Faster R-CNN and Mask R-CNN to gener-
ate initial regions proposals at various scales and as-
pect ratios. This is done by using appropriate multiple
anchor boxes as shown in figure 4. The RPN takes
different size of feature maps generated by the FPN
module and provides outputs of object region bound-
ary and their associated object scores. The scores
specify the likelihood of each proposed region con-
taining an RoI to determine the level of the feature
pyramid in which the sliding (red window) is per-
formed. The regions scanned by the sliding window
are called anchors. Anchors are boxes centered at the
sliding window and are associated with different sizes
and aspects ratios distributed over the whole feature
map. The vector undergoes two 1×1 convolutional
layer for box regression and box classification. At
each sliding-window location multiple region propos-
als are predicted with maximal proposals k referred
to the anchor boxes. The box regression layer outputs
4k coordinates and the classification layer outputs 2k
proposals with probability score to estimate whether
Figure 4: The RPN architecture. The red box represents the
sliding window.
an object exist or not. If an anchor box has an In-
tersection over Union ratio (IoU) with ground truth
greater than 0.8, it is considered as positive label, oth-
erwise it considered as negative label. Therefore, the
scale and the size of the anchor boxes were tuned and
adjusted to improve the damage detection accuracy.
To reduce redundancy, Non-Maximum Suppression
(NMS) was applied to suppress low scored proposals.
3.4 Region of Interest Alignment Layer
(RoIAlign)
As mentioned above, image segmentation at pixel
level is applied by the mask branch to determine
whether a given pixel is a part of the target (here the
damage) or not. During the convolutional and polling
operations accompanied by quantization, the image
sizes changes and causes a positional offset on the
RoI. This process affects the accuracy of the small tar-
gets. Therefore, (Region of interest alignment layer)
RoIAlign is applied, in which the sampling points are
increased to calculate each sampling point by a bilin-
ear interpolation to derive the value of the entire RoI
with less offset and error. RoIAlign improve the aver-
age precision highly (He et al., 2020).
3.5 Training and Loss Function
During the training process, optimizing the loss func-
tion plays an import role for both object detection
and semantic segmentation. The training process
contains forward propagation and backward propa-
gation. Forward propagation starts with extracting
the feature map and has three branches for calculat-
ing the general loss: The mask loss, the classifica-
tion loss and the location regression loss, respectively.
The Back-propagation updates the parameters of each
layer in the network and minimizes the loss func-
tion by momentum optimization algorithm (Sutskever
et al., 2013; Rumelhart et al., 1986). The RPN mod-
ule is trained by object/non-object binary classifica-
High Resolution Mask R-CNN-based Damage Detection on Titanium Nitride Coated Milling Tools for Condition Monitoring by using a
New Illumination Technique
309

tion to each anchor. A positive label is assigned for
the anchor with the highest IoU overlapped with the
ground-truth box or higher than 0.8 overlapped with
the any ground-truth box. Following the multi-task
loss in Fast R-CNN (Girshick, 2015) the loss function
of the first branch for the classification and regression
is given by:
L (
{
p
i
}
,
{
t
i
}
) =
1
N
cls
∑
i
L
cls
(p
i
, p
∗
i
) + λ
1
N
reg
∑
i
p
∗
i
L
reg
(t
i
, t
∗
i
)
(1)
Where i is the index of an anchor in a mini-batch
and p
i
is the predicted probability of anchor being an
object or not. The ground-truth label p
∗
i
is 1 if the
anchor is positive and 0 if the anchor is negative. The
vector t
i
contains 4 coordinates of the ground-truth
boxes and t
∗
i
assigned represents the coordinates of
the predicted bounding box.
The first term of equation 1 L
cls
is the log loss
over the binary classification and assigned to the two
classes, namely damage or no damage. The location
regression L
reg
is the smooth L1 (Faster, 2015) loss
between the vector t
∗
i
and t
i
. The loss t
i
is only ac-
tivated, when the anchor is positive and is balanced
by λ (Pinheiro et al., 2016). The outputs are marked
with bounding boxes assigned to the localization of
the damage with a probability of being there a dam-
age or not. Since in this work the object detection and
the semantic segmentation are combined to classify
each pixel assigned to the damages, the mask branch
outputs a Km
2
dimensional matrix for each RoI cor-
responds to a K binary masks of m × m dimension for
each of the K classes. Similar to (He et al., 2020)
L
mask
is defined for the k
th
mask of the RoI associated
with the ground truth class k as the average binary
cross entropy loss:
L
mask
=
1
m
2
∑
1≤i, j≤m
[y
i j
log( ˆy
k
i j
+ (1 − y
i j
))log(1 − ˆy
k
i j
)]
(2)
Where y
i j
is the label of a cell (i, j) in the true
mask for the region of size m × m and ˆy
k
i j
is the pre-
dicted value of the same cell in the mask learned for
the ground-truth class k. The multitasking loss func-
tion of Mask R-CNN is therefore given by:
L = L (
{
p
i
}
,
{
t
i
}
) + L
mask
(3)
4 EXPERIMENTAL RESULTS
AND ANALYSIS
The dataset of cutting tools captured from the mea-
surement system mentioned in Figure 1 was used.
The measurement system generates homogeneous il-
luminated images of the TiN coated cutting tools with
high contrast and low noise. The high-quality images
allow us to achieve reliable results using small data
sets. The network of (Waleed Abdulla, 2017) was
modified and implemented in this study.
4.1 Dataset
There is a lack of datasets of TiN coated milling tool,
especially for damage detection applications. Captur-
ing valuable data of optical critical objects is chal-
lenged by a lot of difficulties. One of them is avoiding
reflection and shadow in the images. The exposure of
helical shaped cutting tool makes it even more chal-
lenging since the complex shape of the cutting tool
tend to have a variation of brightness, contrast and ar-
tifacts. To overcome these challenges, a new illumi-
nation technique to capture high quality images was
developed, which was allowing to use only a few im-
ages as a training data set and getting reliable results
with less than 25 training epochs. For full inspection
24 images from different angles were captured by ro-
tating the milling tool. Each image was cropped to 36
small fragments of a fixed size 512×512 pixels, mak-
ing a total of 864 images. Around 144 damages were
annotated by experts.
4.1.1 Data Augmentation
The goal was to achieve high performance with only
a few manually annotated images. Therefore, the fol-
lowing data augmentation technique were applied to
increase the training data set from 518 to 5180 im-
ages.
1. The images were randomly flipped (horizontally
and vertically).
2. The images were randomly rotated in a degree
range between -90 to 90.
3. The images have been scaled from 50% to 150%
of their original size.
4.1.2 Cropping Images
The Mask R-CNN and other current instance segmen-
tation methods are designed for supervised learning.
Typically a large amount of labeled data for training
are required to obtain good results. In this work it
has been shown that only a few images in combina-
tion with transfer learning and appropriate data aug-
mentation can generate high resolution damage detec-
tion, reaching an Average Precision (AP) of higher
than 0.83. For the experiment, 24 high quality im-
ages are used, where each image is cropped into 36
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
310
small fragments, resulting in total 864 images to fully
utilize the spatial information. For damage detection
database ground truth annotations of 144 images have
been done manually by drawing a bounding box over
the damages.
4.2 Implementation Details
The algorithm was implemented in Python and all of
the experiments were performed using NVIDIA Tesla
K80 24GB, Linux operating system, 2 virtual CPUs
with capacity of 2GHz and 7680MiB system memory.
The Mask-R-CNN was trained using ResNet101 and
ResNet50 as a backbone architecture for 25 epochs
using a learning momentum of 0.9, a learning rate of
0.001, weights decayed by 0.0001, batch-size of 4 im-
ages per GPU. ResNet101 took 4 hours 15 minutes
for training whereas ResNet50 took only 3 hours 58
minutes.
4.3 Used Evaluation Metrics
The anchors with IoU higher than 0.7 for all of the
Ground Truth (GT) boxes are assigned to positive
labels, whereas anchors with IoU less than 0.3 for
all of the GT boxes are assigned to negative labels.
For evaluating the performance of prepared models,
the standard metrics Intersection-over-Union (overall
IoU) and the precision haven been used. The average
precision AP over different IoU thresholds has been
considered from 0.5 to 0.95 at an interval step of 0.05
(0.5, 0.55, 0.6, 0.65, 0.7, 0.75, 0.8, 0.85, 0.9, 0.95)
(Ren et al., 2017). The precision metric is indicated
as: (AP, AP
50
, AP
55
, AP
60
, AP
65
, ...AP
95
), here the AP
50
indicates the Average Precision at IoU threshold of
0.5 and AP
55
indicates the Average Precision at IoU
threshold of 0.55 and so on.
Precision =
T P
T P + FP
(4)
Precision represents the exactness as the ratio be-
tween the number of correctly detected pixels and the
total number of detected pixels.
• True Positives (TP): The number of pixels cor-
rectly identified as a mask (white pixels).
• True Negatives (TN): The number of pixels cor-
rectly identified as not part of a mask (black pix-
els).
• False Positives (FP): The number of pixels incor-
rectly identified as a mask.
• False Negatives (FN): The number of pixels incor-
rectly identified as not part of a mask.
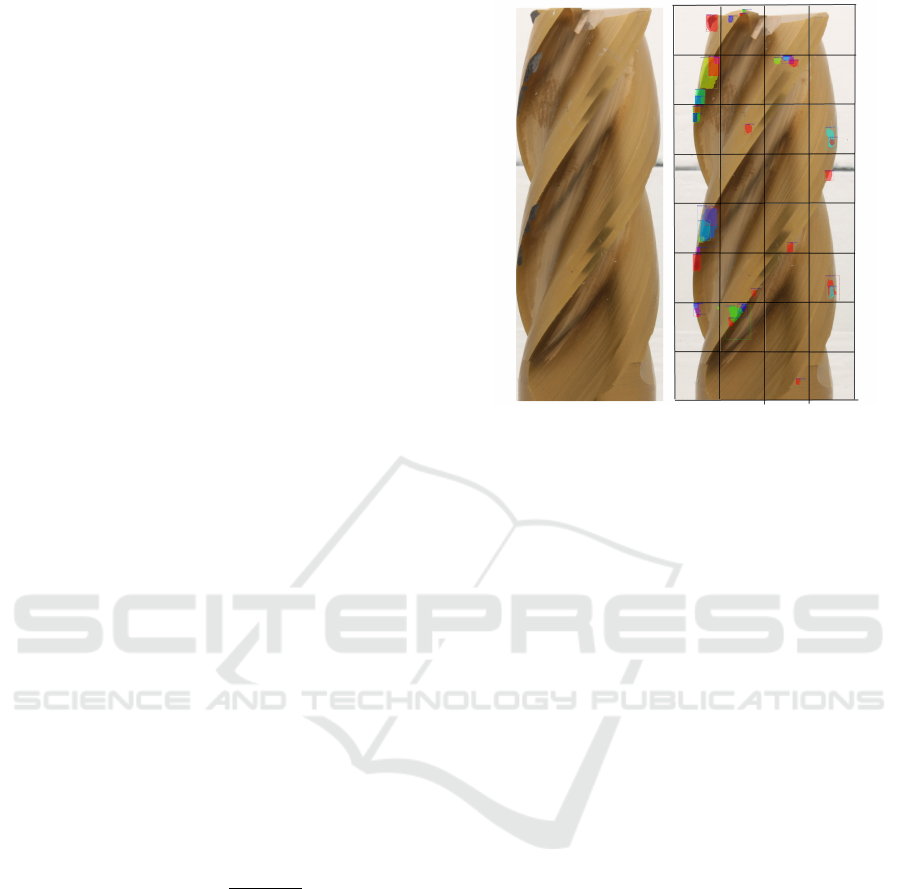
Figure 5: Results of a high-resolution damage detection and
instance segmentation of an TiN coated milling tool. On the
right the damages are marked with the bounding boxes and
the prediction probability.
4.4 Damage Detection Result
The result presented in the current paper is based on
864 images. 60% of the whole dataset was used for
training, 20% used for validation and the remaining
20% was used for testing the model.
4.4.1 High Resolution Milling Tool Damage
Detection Result
Figure 5. displays an example of an TiN milling tool
image captured by the proposed novel measurement
setup (left side). On right side the result after applying
the Mask-R-CNN algorithm to detected damages can
be observed. The damages are depicted and marked
with a bounding boxes and prediction probability. It
can be clearly seen in Figure 5 that almost all damages
have been detected. Semantic segmentation can be
used to determine the size, the shape and localization
of the damages.
4.4.2 ResNet101 vs ResNet50
Generally, deep learning requires a huge amount of
data and in most cases, it is difficult to find the data
sets especially for optical critical components such as
drilling or milling tools. So, due to this reason the
training data was augmented.
At first the detection stage was performed using
ResNet101 and it was followed by ResNet50 back-
bone. Several tests have been done by using different
training parameters such as:
High Resolution Mask R-CNN-based Damage Detection on Titanium Nitride Coated Milling Tools for Condition Monitoring by using a
New Illumination Technique
311

Figure 6: Comparison of average precision by using the
backbones ResNet50 and ResNet101.The AP as a function
of epochs of both models with different backbone architec-
ture (ResNet101 and ResNet50).
• Number of epochs
• RPN anchor scales
• AP at differnt IoU (0.50, 0.55, 0.60, . . . , 0.95)
Firstly, the average precision was compared by us-
ing the backbones ResNet50 and ResNet101 as seen
in Figure 6. To compare the detection and learning
performance the Mask-R-CNN was trained using the
ResNet101 and ResNet50 architecture for 25 epochs
by simultaneously calculating the AP as a function of
epochs. Figure 6 shows the AP@50 for both models
as a function of epochs. An AP of 0.83, was achieved
with the ResNet50 backbone architecture at epoche
21 whereas with the ResNet101 backbone architec-
ture an AP of only 0.71 at epoche 23 was achiev-
able. The ResNet50 has a smaller number of lay-
ers, which helps avoiding overfitting. The model file
size of ResNet50 is about 180 MB compared with 250
MB of the ResNet101, making ResNet50 more effec-
tive for a variety of applications with less computa-
tional complexity. In both cases the risk of overfitting
has been increased after the 23 epochs. Although the
damages differ in shape and size, the necessary com-
plexity and depth of an appropriate neural network
cannot be easily determined. Due to the small data
size and only two classes (damage or not a damage)
ResNet 50 seems to perform better than ResNet 101.
In the context of instance detection and instance seg-
mentation, the damage identification and its position
location must be done. The Intersection over Union
(IoU) measures the overlap between the predicted
boundary and the ground of truth boundary. Thus,
the average precision for different IoU was calculated.
An appropriate scales of anchor boxes can improve
the efficiency and accuracy of the region proposal
generation and hence improve the overall object de-
tection accuracy. Therefore, the AP for different IoU
and different scales of anchor boxes was evaluated
Figure 7: AP at differnt IoU (0.50, 0.55, 0.60, . . . ,
0.95). The ResNet50 architecture performs better than the
ResNet101 architecture.
as shown in Figure 7. It was found, that the model
with the ResNet50 backbones architecture performs
better than ResNet101, especially by adopting the an-
chor boxes scales {16
2
, 32
2
, 64
2
, 128
2
, 256
2
} with the
aspect ratio {1 : 1, 1 : 2, 2 : 1}.
5 CONCLUSION
The results show that high-quality and good-
resolution images that are captured using the pro-
posed measurement setup are capable of achieving su-
perior results with the help of deep convolution neu-
ral networks. For training the network, each image
has been divided into 36 fragments to ensure high
resolution damage detection by utilizing the highest
capability of the FPN. Both in instance and seman-
tic based image segmentation promising results have
been achieved using few images combined with data
augmentation, which pave ways for new opportuni-
ties in inspection applications. To identify the dam-
ages, Mask R-CNN which consists of feature extrac-
tion of the images followed by other convolutional
layers was implemented. ResNet 50 and ResNet 101
architectures were fine tuned for feature extraction.
The segmentation using ResNet 50 has achieved bet-
ter results with less computational time when com-
pared to ResNet 101.
As the future scope for the current work, a big-
ger dataset will be generated that includes different
cutting tools with different coating and variants. An-
other area of research would focus on surface rough-
ness estimation of the tools using the images from the
developed measurement setup.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
312

REFERENCES
Caggiano, A. (2018). Cloud-based manufacturing pro-
cess monitoring for smart diagnosis services. Inter-
national Journal of Computer Integrated Manufactur-
ing, 31(7):612–623.
Chen, J.-Y. and Lee, B.-Y. (2010). Development of a sim-
plified machine for measuring geometric parameters
of end mills.
Cupek, R., Erdogan, H., Huczala, L., Wozar, U., and
Ziebinski, A. (2015). Agent based quality manage-
ment in lean manufacturing. In Núñez, M., Nguyen,
N. T., Camacho, D., and Trawi
´
nski, B., editors, Com-
putational Collective Intelligence, volume 9329 of
Lecture Notes in Computer Science, pages 89–100.
Springer International Publishing, Cham.
Cupek, R., Zi˛ebi
´
nski, A., Drewniak, M., and Fojcik, M.
(2018). Improving kpi based performance analysis in
discrete, multi-variant production. In Nguyen, N. T.,
Hoang, D. H., Hong, T.-P., Pham, H., and Trawi
´
nski,
B., editors, Intelligent Information and Database Sys-
tems, volume 10752 of Lecture Notes in Computer
Science, pages 661–673. Springer International Pub-
lishing, Cham.
Erhan, D., Szegedy, C., Toshev, A., and Anguelov, D.
(2014). Scalable object detection using deep neural
networks. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 2147–
2154.
Faster, R. (2015). Towards real-time object detection with
region proposal networks. Advances in neural infor-
mation processing systems, page 9199.
Girshick, R. (2015). Fast r-cnn. In 2015 IEEE International
Conference on Computer Vision (ICCV), pages 1440–
1448. IEEE.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich feature hierarchies for accurate object detec-
tion and semantic segmentation. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 580–587.
Gonzalez, S., Arellano, C., and Tapia, J. E. (2019). Deep-
blueberry: Quantification of blueberries in the wild
using instance segmentation. IEEE Access, 7:105776–
105788.
Grzechca, D., Zi˛ebi
´
nski, A., and Rybka, P. (2017). En-
hanced reliability of adas sensors based on the obser-
vation of the power supply current and neural network
application. In Nguyen, N. T., Papadopoulos, G. A.,
J˛edrzejowicz, P., Trawi
´
nski, B., and Vossen, G., ed-
itors, Computational Collective Intelligence, volume
10449 of Lecture Notes in Computer Science, pages
215–226. Springer International Publishing, Cham.
Hariharan, B., Arbeláez, P., Girshick, R., and Malik, J.
(2014). Simultaneous detection and segmentation.
In European Conference on Computer Vision, pages
297–312.
Hariharan, B., Arbelaez, P., Girshick, R., and Malik,
J. (2017). Object instance segmentation and fine-
grained localization using hypercolumns. IEEE trans-
actions on pattern analysis and machine intelligence,
39(4):627–639.
He, K., Gkioxari, G., Dollár, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE international
conference on computer vision, pages 2961–2969.
He, K., Gkioxari, G., Dollar, P., and Girshick, R. (2020).
Mask r-cnn. IEEE transactions on pattern analysis
and machine intelligence, 42(2):386–397.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Spatial pyra-
mid pooling in deep convolutional networks for visual
recognition. IEEE transactions on pattern analysis
and machine intelligence, 37(9):1904–1916.
Kang, J. and Gwak, J. (2019). Ensemble of in-
stance segmentation models for polyp segmentation in
colonoscopy images. IEEE Access, 7:26440–26447.
Liang, S. Y., Hecker, R. L., and Landers, R. G. (2004). Ma-
chining process monitoring and control: the state-of-
the-art. J. Manuf. Sci. Eng., 126(2):297–310.
Liu, L., Zheng, F., Zhu, L., Li, Y., Huan, K., Shi, X.,
and Liu, G. (2015). Luminance uniformity of inte-
grating sphere light source. In 2015 International
Conference on Optoelectronics and Microelectronics
(ICOM), pages 265–268.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). Ssd: Single shot
multibox detector. 9905:21–37.
Nur Ömero
˘
glu, A., Kumbasar, N., Argun Oral, E., and
Ozbek, I. Y. (2019). Mask r-cnn algoritması ile hangar
tespiti hangar detection with mask r-cnn algorithm.
27th Signal Processing and Communications Appli-
cations Conference (SIU), 31(7):1–4.
Pinheiro, P. O., Collobert, R., and Dollar, P. (2015). Learn-
ing to segment object candidates.
Pinheiro, P. O., Lin, T.-Y., Collobert, R., and Dollàr, P.
(2016). Learning to refine object segments.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 779–
788.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. Advances in neural information
processing systems, 28:91–99.
Ren, S., He, K., Girshick, R., and Sun, J. (2017). Faster
r-cnn: Towards real-time object detection with re-
gion proposal networks. IEEE transactions on pattern
analysis and machine intelligence, 39(6):1137–1149.
Rumelhart, D. E., Hinton, G. E., and Williams, R. J. (1986).
Learning representations by back-propagating errors.
nature, 323(6088):533–536.
Schulz, H. and Moriwaki, T. (1992). High-speed machin-
ing. CIRP annals, 41(2):637–643.
Sermanet, P., Eigen, D., Zhang, X., Mathieu, M., Fergus,
R., and LeCun, Y. (2014). Overfeat: Integrated recog-
nition, localization and detection using convolutional
networks. 2nd international conference on learning
representations, iclr 2014. In 2nd International Con-
ference on Learning Representations, ICLR 2014.
Short, M. and Twiddle, J. (2019). An industrial digitaliza-
tion platform for condition monitoring and predictive
High Resolution Mask R-CNN-based Damage Detection on Titanium Nitride Coated Milling Tools for Condition Monitoring by using a
New Illumination Technique
313

maintenance of pumping equipment. Sensors (Basel,
Switzerland), 19(17).
Shrivastava, A., Gupta, A., and Girshick, R. (2016). Train-
ing region-based object detectors with online hard ex-
ample mining. In Proceedings of the IEEE conference
on computer vision and pattern recognition, pages
761–769.
Spišák, E. and Majernikova, J. (2017). Increasing of dura-
bility of cutting tools. Advances in Science and Tech-
nology Research Journal, 11:141–146.
Sutskever, I., Martens, J., Dahl, G., and Hinton, G. (2013).
On the importance of initialization and momentum in
deep learning. In International conference on machine
learning, pages 1139–1147.
Szegedy, C., Reed, S., Erhan, D., Anguelov, D., and Ioffe, S.
(2014). Scalable, high-quality object detection. arXiv
preprint arXiv:1412.1441 [Titel anhand dieser ArXiv-
ID in Citavi-Projekt übernehmen].
Szegedy, C., Toshev, A., and Erhan, D. (2013). Deep neural
networks for object detection.
Tsung-Yi Lin, Piotr Dollar, Ross Girshick, Kaiming He,
Bharath Hariharan, and Serge Belongie (2017). Fea-
ture pyramid networks for object detection.
Waleed Abdulla (2017). Mask r-cnn for object detection
and instance segmentation on keras and tensorflow.
Yingjie, Z. (2014). Energy efficiency techniques in machin-
ing process: a review. The International Journal of
Advanced Manufacturing Technology, 71(5-8):1123–
1132.
Yli-Ojanperä, M., Sierla, S., Papakonstantinou, N., and Vy-
atkin, V. (2019). Adapting an agile manufacturing
concept to the reference architecture model industry
4.0: A survey and case study. Journal of Industrial
Information Integration, 15(5):147–160.
You, Y., Cao, J., Zhang, Y., Liu, F., and Zhou, W. (2019).
Nearshore ship detection on high-resolution remote
sensing image via scene-mask r-cnn. IEEE Access,
7:128431–128444.
Zhang, Q., Chang, X., and Bian, S. B. (2020). Vehicle-
damage-detection segmentation algorithm based on
improved mask rcnn. IEEE Access, 8:6997–7004.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
314
