
An Efficient Relax-and-Solve Algorithm for the Resource-Constrained
Project Scheduling Problem
Alireza Etminaniesfahani
a
, Hanyu Gu
b
and Amir Salehipour
c
School of Mathematical and Physical Sciences, University of Technology Sydney, Australia
Keywords:
Relax-and-Solve, Project Scheduling, Resource-Constrained Project Scheduling Problem, RCPSP, Makespan,
Matheuristic.
Abstract:
The resource-constrained project scheduling problem (RCPSP) has a broad range of practical applications,
e.g., in manufacturing, mining, and supply chain, among others(Kreter et al., 2015). Over the last 50 years,
many researchers have tried to solve this challenging NP-hard problem. This paper presents an efficient and
easy-to-implement relax-and-solve matheuristic to solve RCPSP. The proposed method employs constraint
programming in a heuristic framework and uses CPLEX as an optimization solver. This algorithm is tested on
more than 1500 instances from the standard library PSPLIB. Our experimental results show that the proposed
heuristic framework outperforms the CPLEX and provides competitive results compared with the state-of-the-
art techniques.
1 INTRODUCTION
Scheduling a large-scale project characterized by var-
ious activities, complicated precedence constraints
and enormous resource demands is critical and chal-
lenging for managers. One of the primary sources
of delays in projects is the lack of proper project
scheduling (Herroelen and Leus, 2005). Since the
late 1950s, the critical path method (CPM) has been
one of the widely used planning methods that con-
sider precedence constraints and time parameters of
the activities. However, CPM assumes that unlimited
resource is always available, which is not practical in
most of the industrial projects (Liu et al., 2020).
In 1969, Pritsker et al. introduced the Resource-
Constrained Project Scheduling Problem (RCPSP)
(Pritsker et al., 1969), which considers both prece-
dence constraints among the activities and resource
demands of the scheduled activities over time. The
RCPSP and its variants have since been applied to nu-
merous realistic applications in almost all industries,
including job-shop scheduling problems (Demeule-
meester and Herroelen, 1992), mining (Alford et al.,
2007), and supply chain (Liu and Lu, 2017). The wide
applications of the RCPSP and also its computational
a
https://orcid.org/0000-0002-9780-8262
b
https://orcid.org/0000-0003-2035-2583
c
https://orcid.org/0000-0003-4866-1396
complexity as an NP-Hard problem has attracted the
attention of many researchers (Blazewicz et al., 1983;
Rahman et al., 2020) to solve these problems.
Generally, solution methods for the RCPSP can be
categorized as exact algorithms and heuristics-based
approaches (Herroelen et al., 1998). Exact algorithms
can obtain and guarantee optimal solutions, but the
solution time becomes unacceptable as the problem
scale increases (Chen et al., 2021). Heuristic-based
methods are widely used to overcome the computa-
tional limitations of the exact algorithms but have no
guarantee for solution optimality (Kolisch and Hart-
mann, 2006).
Constraint programming (CP) is an exact method
and has been very successful over the last two decades
for solving scheduling problems (Laborie, 2018), and
especially the RCPSP (Liess and Michelon, 2008;
Schutt et al., 2011; Schutt et al., 2015; Kreter et al.,
2017). General CP solvers are also available in both
open-source (Perron and Furnon, 7 19) and commer-
cial (CPLEX, 2017) software.
The performance of CP deteriorates when the
problem size increases (e.g., projects with more than
100 tasks). This motivates us to design a matheuristic
within the recently proposed relax-and-solve (R&S)
framework to exploit the efficient search capability of
CP for small and medium size RCPSP.
The R&S is a matheuristic algorithm that re-
cently developed for scheduling problems (Sale-
Etminaniesfahani, A., Gu, H. and Salehipour, A.
An Efficient Relax-and-Solve Algorithm for the Resource-Constrained Project Scheduling Problem.
DOI: 10.5220/0010772400003117
In Proceedings of the 11th International Conference on Operations Research and Enterprise Systems (ICORES 2022), pages 271-277
ISBN: 978-989-758-548-7; ISSN: 2184-4372
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
271

hipour, 2017; Salehipour et al., 2018; Ahmadian
et al., 2020; Ahmadian et al., 2021). This method
improves an existing feasible solution by iteratively
relaxing the order constraints (the execution order of
tasks) in the current solution and rescheduling the re-
laxed problem with an MIP solver. Although the size
of the relaxed problem is still large since all jobs are
included, the solution time is significantly reduced in
practice. Compared with scheduling problems, the
big challenge to the application of the R&S on RCPSP
is that there is no clear definition for task orders or
task sequences in a feasible solution. In this paper,
we use time windows, instead of the sequence win-
dow, to select the tasks that will be fully rescheduled,
while for the tasks outside of the window, CP con-
straints such as start-at-end are used to maintain the
relative sequence of tasks.
Because the CP outperforms MIP in solving large-
scale problems and can quickly obtain high quality
solutions (Maleck et al., 2018; Kelareva et al., 2012),
we expect the hybridization of CP and R&S, i.e.,
using CP in R&S framework be helpful for solving
RCPSP.
Related approaches in the literature for solving
mixed-integer programming models include relax-
and-fix and fix-and-optimize. In the relax-and-fix
method, the binary variables in the rolling time win-
dow are divided into two groups, i.e., fixed variables,
and optimized variables. The integrality constraint for
variables out of the rolling window is relaxed (Absi
and van den Heuvel, 2019). The fix-and-optimize
method operates on two groups of variables, namely
fixed variables and optimized variables. A great asset
of fix-and-optimize is that the obtained solutions are
always feasible because it does not relax integrality
constraints (Helber and Sahling, 2010; Escudero and
Romero, 2017).
The main contribution of this study is to propose a
novel matheuristic for decomposing and solving the
RCPSP using a constraint programming solver. In
particular, we
• propose an R&S approach for the RCPSP,
• propose a novel technique to create the relaxed
problems,
• develop a hybrid algorithm combining heuristics
and CP, and
• produce superior results to the state-of-the-art by
solving 1560 problem instances from PSPLIB
(project scheduling problem library) for 30, 60,
and 120 activities (Kolisch and Sprecher, 1997).
The remainder of this paper is organized as follows.
We define the RCPSP in Section 2, and provide our
R&S method in Section 3. In Section 4, we report the
results of our computational experiments, and Sec-
tion 5 provides some conclusions and future research
directions.
2 PROBLEM DEFINITION AND
FORMULATION
The RCPSP consists of a set of n tasks. Each task
i has a known non-negative duration represented by
d
i
. There are also precedence relationships between
tasks, which are commonly modeled as an activity-
on-node network G = (V, A). Each task corresponds
to a node in the vertex set V = {0, 1, . . . , n + 1}, and
the precedence relationship that task i must complete
before task j can start is represented as an arc (i, j)
in the arc set A. Two dummy nodes (tasks) 0 and
n + 1 are added to represent the start and finish of the
project, respectively. The duration of dummy tasks
i.e., d
0
and d
n+1
are 0. Graph G is acyclic since only
precedence constraints are modeled.
A fixed set RR of renewable resources is available.
Each resource k ∈ RR has a constant non-negative ca-
pacity R
k
at any time during planning horizon T . Each
task requires a non-negative amount of r
ik
of each re-
source k ∈ RR. The tasks are non-preemptive, which
means tasks cannot be interrupted once started.
Let S
i
represent the starting time of the task i, S
0
=
0. We aim at minimizing the makespan (the comple-
tion time of the last activity) of the project which is
S
n+1
. The mathematical model of the RCPSP can be
expressed as follows:
minS
n+1
(1)
subject to
S
j
≥ S
i
+ d
i
, ∀(i, j) ∈ A, (2)
∑
i∈τ(t)
r
ik
≤ R
k
, ∀k ∈ RR, ∀t ∈ {0, . . . , T − 1}, (3)
τ(t) = {i ∈ V |S
i
≤ t < S
i
+ d
i
}, (4)
S
i
∈ {0, 1, . . . , T − d
i
}, ∀i ∈ V, (5)
where T is the available upper bound to the project
duration.
3 THE PROPOSED
RELAX-AND-SOLVE METHOD
In this section, an efficient R&S matheuristic algo-
rithm is proposed for the RCPSP. In this method, a
rolling time window is defined, and during the “re-
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
272
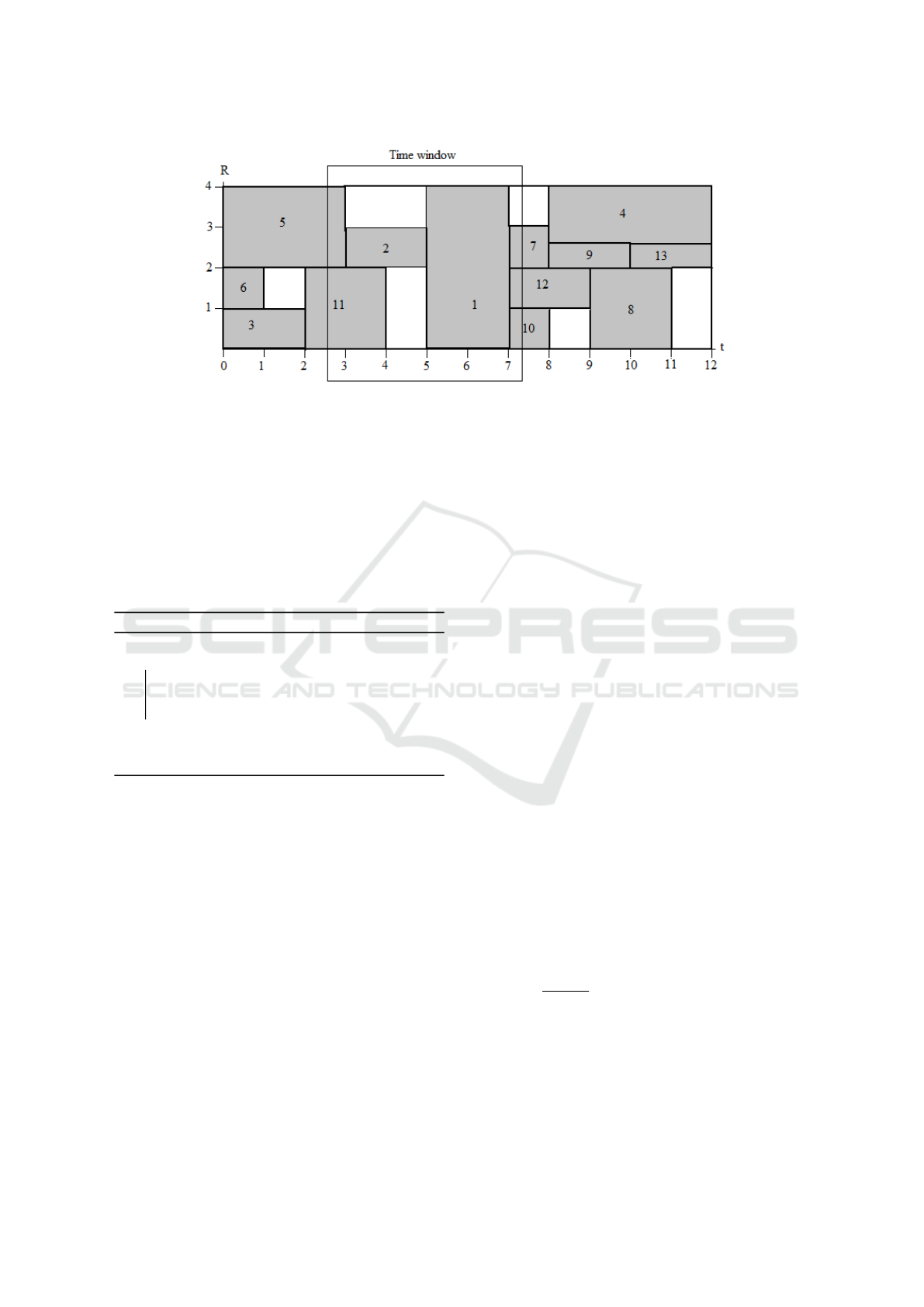
Figure 1: An RCPSP example.
lax” phase, all tasks outside the window are fixed with
each other with respect to the order in the original so-
lution, and only tasks inside the time window can be
reordered. In the “solve” phase, a feasible solution is
obtained by solving the relaxed problem. As we do
not remove the precedence and resource constraints,
the obtained solution is always feasible for the origi-
nal problem. The general R&S algorithm is summa-
rized in Algorithm 1.
Algorithm 1: The R&S algorithm.
Input: A feasible solution for the problem.
while the stopping condition is not met do
Generate a relaxed problem;
Solve the relaxed problem by using an
optimization solver;
end
return the best obtained schedule (the
solution);
In what follows, we discuss the generation of an
initial solution for the problem, the generation of re-
laxed problem in each iteration, and also the stopping
criterion for this algorithm.
3.1 Initial Solution
The CP is an effective method for generating feasi-
ble solutions even for highly constrained problems
(Bockmayr and Hooker, 2005). The successful use of
CP to generate an initial solution is presented in (M.
Pour et al., 2018). We used CPLEX CP solver and set
a short time limit to solve the original problem and
generate a feasible initial solution.
3.2 Generating the Relaxed Problem
We use an example to illustrate the generation of re-
laxed problems. Figure 1 shows a general picture of
a feasible solution while solving a problem by R&S.
The time window in the figure is used to divide the
tasks into two groups which are treated differently. In
the following, the generation of relaxed problems are
explained.
3.2.1 The Rolling Time Window
A rolling time window is utilized to generate a re-
laxed problem. The larger the time window, the more
tasks are relaxed in each iteration. In the first iteration
the time window starts at t = 0 (second). After solv-
ing each relaxed problem, the time window should be
gradually moved forward, and when the whole time
horizon is covered, the time window restarts from
t = 0. For moving forward the time window, a cer-
tain overlap with the current time window should be
considered to let the tasks move in the time horizon.
Otherwise, eliminating the overlap results in restrict-
ing tasks in separate time windows, losing the algo-
rithm’s global searchability, and consequently trap-
ping to a local optimum area. The length of each time
window and the overlap (parameter overlap) of time
windows should be a function of the makespan. This
means both of those parameters should be reduced in
proportion to the makespan’s reduction after each it-
eration. We defined the length of the time window as
follows: (
makespan
N
) × (1 + overlap). The positive real
value of N to decompose the planning time, and the
value of overlap which is between 0 and 1, should be
set for each problem as explained in section 4.
An Efficient Relax-and-Solve Algorithm for the Resource-Constrained Project Scheduling Problem
273

3.2.2 Tasks Group 1 (G1)
The tasks of the group 1 are those that are completely
outside the time window, which means their finish
time is less than the minimum of the time window,
or their start time is greater than the maximum of the
time window. In Figure 1, the tasks of group 1 are
G1 = {3, 6, 4, 9, 8, 13}.
To generate a relaxed problem, when the finish
time (start time) of a task in group 1 is equal to
the start time (finish time) of another task, then two
tasks are fixed with each other by adding the “start-
at-end” constraints from (CPLEX, 2017). In Fig-
ure 1, the following set of start-at-end constraints is
added to the problem and generate three super tasks:
{(3, 11), (7, 4), (7, 9), (9, 13), (12, 8)}. In this paper,
we refer to the generated tasks by sticking some avail-
able tasks to each other as a super task. The advan-
tage of developing super tasks is reducing the compu-
tations of the problem by forcing some tasks to move
in the time horizon simultaneously. The first super
task is generated by tasks 3 − 11, the second one by
tasks 7 − 4 − 9 − 13 and the third one by tasks 12 − 8.
As is clear in Figure 1, task 6 in group 1 is not fixed,
this just may happen for the tasks that start at t = 0
because otherwise tasks start as soon as the resource
constraint and precedence constraints satisfy, which
means it happens right after finish of a task. We let
task 6 be relaxed, thus the algorithm can efficiently
optimize the schedule and fill the gap (between t = 1
and t = 2 if the precedence and resource constraints
are not violated.
3.2.3 Tasks Group 2 (G2)
The tasks in group 2 include the remaining tasks, i.e.,
the tasks that all or some of them are inside the time
window. In the proposed example in Figure 1, the
tasks of group are G2 = {5, 11, 2, 1, 7, 12, 10}.
Tasks group 2 are relaxed to be reordered. It
should be noted that the original precedence and re-
source constraints are always maintained.
3.3 Solving the Relaxed Problem
The solve operation uses the CPLEX CP optimization
solver to solve the relaxed problem. Since the relaxed
problem becomes smaller, it includes just a few tasks
to schedule and can be solved much easier than the
original problem. Moreover, the solution of the re-
laxed problem is always feasible. It should be noted
that the tasks of group 1 can not be reordered, and
because their starting times are not fixed after each it-
eration the starting time of all tasks (including tasks
of group 1) is updated, and the makespan of the origi-
nal problem is updated to the makespan of the relaxed
problem.
3.4 Stopping Criterion
The stopping criterion for this R&S is the total num-
ber of relaxed problem that generated. Also, the opti-
mization solver has a time limit in each iteration, and
as soon as the solver finds the optimum solution of the
relaxed problem (local optimum for the original prob-
lem) or the computation time exceeds the time limit,
the algorithm goes to the next iteration.
4 COMPUTATIONAL
EXPERIMENTS
In order to evaluate the performance of the proposed
R&S algorithm for solving the RCPSP, we present
the computational results obtained by R&S on 1560
instances from the PSPLIB benchmark (Kolisch and
Sprecher, 1997) with J30, J60 and J120 datasets. The
datasets J30 and J60 each contains 480 instances, and
J120 contains 600 instances. The R&S algorithm is
implemented in Python version 3.6.5 and solved by
the CPLEX CP version 12.10.0.0 (CPLEX, 2017).
Except for the stopping criterion (time limit) for solv-
ing each relaxed problem, all other solver parameters
are set to their default values. The numerical exper-
iments were conducted on an Intel(R) Core™ i7, 2
GHz CPU, and 6GB of RAM under the Windows 10
operating system.
4.1 Parameter Settings
The time limit for CPLEX CP to solve for the initial
solution is set to one second. The computational time
for all experiments is 600 seconds. We set the stop-
ping time of each iteration to 25 seconds. In this way,
we set the maximum computational time of J30, J60
and J120 to 150, 300 and 600 seconds, respectively.
We set overlap = 0.4. To calculate the length of
each time window, we set N = 0.1 × n, i.e., 3, 6 and
12 for J30, J60, J120, respectively. The total num-
ber of relaxed problems generated, i.e., the maximum
number of iterations is set to 2 × N.
4.2 Tests on PSPLIB
In this section, we first compare the results from our
R&S method with the results from CPLEX CP and
three other exact methods including, failure directed
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
274
Table 1: Comparison of LCG, FDS, SMT, CPLEX, and R&S on Ct and ∆
LB
.
J30 J60 J120
Method ∆
LB
Ct ∆
LB
Ct ∆
LB
Ct
LCG 0 - 2.17 - 9.76 -
FDS 0 0.93s 1.91 67.44s 7.02 322.52s
SMT 0 0.22s 1.88 61.90s 9.55 320.50s
CPLEX 0 4.71s 1.11 52.83s 4.69 350.40s
R&S 0 5.12s 1.06 46.75s 4.63 235.65s
Table 2: Comparison of the state-of-the-art metaheuristics and R&S on ∆
CPM
.
Algorithm J30 J60 J120
R&S (our proposed method) 0 10.54 31.09
DBGA (Debels and Vanhoucke, 2007) 0.02 10.68 30.69
MA (Rahman et al., 2020) 0 10.55 31.12
GA-FBI (Liu et al., 2020) 0.0 10.56 32.76
COA (Elsayed et al., 2017) 0.0 10.58 31.22
PSO-SS(Koulinas et al., 2014) 0.01 10.68 31.23
search (FDS), lazy clause generation (LCG), and sat-
isfiability modulo theories (SMT) by (Bofill et al.,
2020). In Table 1, for each set of instances, we pro-
vide the average of computational time (Ct).
The lower bound (LB) provides the minimum of
the makespan for each problem. We use the earli-
est start time of the last dummy task as the C
max,LB,p
.
In Table 1, we report the average deviations from the
best-known lower bound ( ∆
LB
) as follows:
∆
LB
=
∑
p=P
p=1
C
max,R&S,p
−C
max,LB,p
C
max,LB,p
× 100%
P
(6)
where P is the total number instances in an instance
set, and C
max,R&S,p
and C
max,LB,p
are the makespan
obtained by R&S method and the best known lower
bound for each instance, respectively. According to
Table 1, the performance of R&S is superior to solve
J60 and J120 instances because the average deviation
from the best known lower bound is better than other
methods. For J30, all methods can find the optimum
solution. Comparing the result of CPLEX as an in-
dependent method with R&S for J60 and J120 illus-
trates the efficiency of our proposed algorithm. For
J30, R&S is slower than CPLEX but still finds op-
timal solutions for all instances. We also compare
our results and the decomposition based genetic al-
gorithm (Debels and Vanhoucke, 2007), and state-of-
the-art metaheuristic methods from (Rahman et al.,
2020) including, memetic algorithm (MA), consoli-
dated optimization algorithm (COA) (Elsayed et al.,
2017), PSO based hyper-heuristic algorithm (PSO-
HH) (Koulinas et al., 2014), and genetic algorithm
using forward-backward improvement (GAFBI) (Liu
et al., 2020). Because in the literature the number
of schedule generated is used as a stopping criterion
which is not applicable to our method, we use the best
results of those methods for 50,000 schedule gener-
ated. The average deviation from the CPM (∆
CPM
)
can be calculated by using Equation (6), where the
lower bound of the makespan, C
max,LB,p
is produced
by CPM. The results summarized in Table 2 illustrates
that our R&S method in comparison with the state-
of-the-art methods can provide competitive results in
a reasonable time. Robust solving methods provide
good solutions for all runs. However, the random pa-
rameters in metaheuristics for solving RCPSPs can re-
sult in different outputs in solving the same problem.
Researchers thus are recommended to report the aver-
age results of several independent runs.
5 CONCLUSION
In this paper, we presented a relax-and-solve (R&S)
matheuristic, which is an efficient and very easy
to implement algorithm to solve the resource-
constrained project scheduling problem (RCPSP). In
this method, the CPLEX CP solver is utilized to solve
the relaxed problems. The results of the tests on 1560
instances from the standard library PSPLIB with 30,
60, and 120 tasks show the capability of this method
to obtain good quality solutions. Future work includes
automating tuning the time window length in each it-
eration and employing local searches to improve the
results. It is also interesting to extend this method
to multi-mode and scheduling problems under uncer-
tainty.
An Efficient Relax-and-Solve Algorithm for the Resource-Constrained Project Scheduling Problem
275

ACKNOWLEDGMENTS
Alireza Etminaniesfahani is the recipient of the UTS
International Research Scholarship (IRS) and UTS
President’s Scholarship (UTSP).
REFERENCES
Absi, N. and van den Heuvel, W. (2019). Worst case anal-
ysis of relax and fix heuristics for lot-sizing prob-
lems. European Journal of Operational Research,
279(2):449–458.
Ahmadian, M. M., Salehipour, A., and Cheng, T. (2021).
A meta-heuristic to solve the just-in-time job-shop
scheduling problem. European Journal of Opera-
tional Research, 288(1):14 – 29.
Ahmadian, M. M., Salehipour, A., and Kovalyov, M.
(2020). An efficient relax-and-solve heuristic for
open-shop scheduling problem to minimize total
weighted earliness-tardiness. Available at SSRN
3601396.
Alford, C., Brazil, M., and Lee, D. H. (2007). Optimisation
in Underground Mining, pages 561–577. SpringerUS,
Boston, MA.
Blazewicz, J., Lenstra, J., and Kan, A. (1983). Schedul-
ing subject to resource constraints: classification and
complexity. Discrete Applied Mathematics, 5(1):11–
24.
Bockmayr, A. and Hooker, J. N. (2005). Constraint pro-
gramming. In Aardal, K., Nemhauser, G., and Weis-
mantel, R., editors, Discrete Optimization, volume 12
of Handbooks in Operations Research and Manage-
ment Science, pages 559–600. Elsevier.
Bofill, M., Coll, J., Suy, J., and Villaret, M. (2020). Smt
encodings for resource-constrained project schedul-
ing problems. Computers & Industrial Engineering,
149:106777.
Chen, H., Ding, G., Qin, S., and Zhang, J. (2021). A
hyper-heuristic based ensemble genetic programming
approach for stochastic resource constrained project
scheduling problem. Expert Systems with Applica-
tions, 167:114174.
CPLEX, I. I. (2017). version 12.8.0.
Debels, D. and Vanhoucke, M. (2007). A decomposition-
based genetic algorithm for the resource-constrained
project-scheduling problem. Operations Research,
55:457–469.
Demeulemeester, E. and Herroelen, W. (1992). A branch-
and-bound procedure for the multiple resource-
constrained project scheduling problem. Management
Science, 38(12):1803–1818.
Elsayed, S., Sarker, R., Ray, T., and Coello, C. C. (2017).
Consolidated optimization algorithm for resource-
constrained project scheduling problems. Information
Sciences, 418-419:346–362.
Escudero, L. F. and Romero, C. P. (2017). On solving a
large-scale problem on facility location and customer
assignment with interaction costs along a time hori-
zon. TOP: An Official Journal of the Spanish Society
of Statistics and Operations Research, 25(3):601–622.
Helber, S. and Sahling, F. (2010). A fix-and-optimize ap-
proach for the multi-level capacitated lot sizing prob-
lem. International Journal of Production Economics,
123(2):247–256.
Herroelen, W., De Reyck, B., and Demeulemeester, E.
(1998). Resource-constrained project scheduling: A
survey of recent developments. Computers & Opera-
tions Research, 25(4):279–302.
Herroelen, W. and Leus, R. (2005). Identification
and illumination of popular misconceptions about
project scheduling and time buffering in a resource-
constrained environment. Journal of the Operational
Research Society, 56(1):102–109.
Kelareva, E., Brand, S., Kilby, P., Thiebaux, S., and Wal-
lace, M. (2012). Cp and mip methods for ship schedul-
ing with time-varying draft. ICAPS 2012 - Proceed-
ings of the 22nd International Conference on Auto-
mated Planning and Scheduling.
Kolisch, R. and Hartmann, S. (2006). Experimental inves-
tigation of heuristics for resource-constrained project
scheduling: An update. European Journal of Opera-
tional Research, 174(1):23–37.
Kolisch, R. and Sprecher, A. (1997). Psplib - a project
scheduling problem library: Or software - orsep oper-
ations research software exchange program. European
Journal of Operational Research, 96(1):205–216.
Koulinas, G., Kotsikas, L., and Anagnostopoulos, K.
(2014). A particle swarm optimization based hyper-
heuristic algorithm for the classic resource con-
strained project scheduling problem. Information Sci-
ences, 277:680–693.
Kreter, S., Rieck, J., and Zimmermann, J. (2015). Models
and solution procedures for the resource-constrained
project scheduling problem with general temporal
constraints and calendars. European Journal of Op-
erational Research, 251.
Kreter, S., Schutt, A., and Stuckey, P. (2017). Using con-
straint programming for solving rcpsp/max-cal. Con-
straints, 22.
Laborie, P. (2018). An Update on the Comparison of MIP,
CP and Hybrid Approaches for Mixed Resource Allo-
cation and Scheduling, pages 403–411. Springer In-
ternational Publishing, Cham.
Liess, O. and Michelon, P. (2008). A constraint program-
ming approach for the resource-constrained project
scheduling problem. Annals of Operations Research,
157(1):25–36.
Liu, J., Liu, Y., Shi, Y., and Li, J. (2020). Solving resource-
constrained project scheduling problem via genetic al-
gorithm. Journal of Computing in Civil Engineering,
34(2):04019055.
Liu, J. and Lu, M. (2017). Optimization on supply-
constrained module assembly process. In IGLC 2017 -
Proceedings of the 25th Annual Conference of the In-
ternational Group for Lean Construction, pages 813–
820. cited By 2.
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
276

M. Pour, S., Drake, J. H., Ejlertsen, L. S., Rasmussen,
K. M., and Burke, E. K. (2018). A hybrid
constraint programming/mixed integer programming
framework for the preventive signaling maintenance
crew scheduling problem. European Journal of Oper-
ational Research, 269(1):341–352.
Maleck, C., Nieke, G., Bock, K., Pabst, D., and Stehli, M.
(2018). A comparison of an cp and mip approach
for scheduling jobs in production areas with time con-
straints and uncertainties. In 2018 Winter Simulation
Conference (WSC), pages 3526–3537.
Perron, L. and Furnon, V. (2019-7-19). Or-tools.
Pritsker, A., Waiters, L. J., and Wolfe, P. (1969). Multi-
project scheduling with limited resources: A zero-one
programming approach. Management Science, 16:93–
108.
Rahman, H. F., Chakrabortty, R. K., and Ryan, M. J. (2020).
Memetic algorithm for solving resource constrained
project scheduling problems. Automation in Con-
struction, 111:103052.
Salehipour, A. (2017). A heuristic algorithm for the
aircraft landing problem. In 22nd International
Congress on Modelling and Simulation. Modelling
and Simulation Society of Australia and New Zealand
Inc.(MSSANZ).
Salehipour, A., Ahmadian, M., and Oron, D. (2018). Ef-
ficient and simple heuristics for the aircraft landing
problem. In Matheuristic 2018 International Confer-
ence.
Schutt, A., Feydy, T., Stuckey, P., and Wallace, M. (2011).
Explaining the cumulative propagator. Constraints,
16:250–282.
Schutt, A., Feydy, T., Stuckey, P. J., and Wallace, M. G.
(2015). A Satisfiability Solving Approach, pages 135–
160. Springer International Publishing, Cham.
An Efficient Relax-and-Solve Algorithm for the Resource-Constrained Project Scheduling Problem
277
