
LABNET: A Collaborative Method for DNN Training and Label
Aggregation
Amirmasoud Ghiassi
1 a
, Robert Birke
2 b
and Lydia Y. Chen
1 c
1
Delft University of Technology, Delft, The Netherlands
2
ABB Research, Baden-D
¨
attwil, Switzerland
Keywords:
Crowdsourcing, Deep Learning, Noisy Labels, Label Aggregation.
Abstract:
Today, to label the massive datasets needed to train Deep Neural Networks (DNNs), cheap and error-prone
methods such as crowdsourcing are used. Label aggregation methods aim to infer the true labels from noisy
labels annotated by crowdsourcing workers via labels statistics features. Aggregated labels are the main data
source to train deep neural networks, and their accuracy directly affects the deep neural network performance.
In this paper, we argue that training DNN and aggregating labels are not two separate tasks. Incorporation be-
tween DNN training and label aggregation connects data features, noisy labels, and aggregated labels. Since
each image contains valuable knowledge about its label, the data features help aggregation methods enhance
their performance. We propose LABNET an iterative two-step method. Step one: the label aggregation algo-
rithm provides labels to train the DNN. Step two: the DNN shares a representation of the data features with
the label aggregation algorithm. These steps are repeated until the converging label aggregation error rate. To
evaluate LABNET we conduct an extensive empirical comparison on CIFAR-10 and CIFAR-100 under differ-
ent noise and worker statistics. Our evaluation results show that LABNET achieves the highest mean accuracy
with an increase of at least 8% to 0.6% and lowest error rate with a reduction of 7.5% to 0.25% against existing
aggregation and training methods in most cases.
1 INTRODUCTION
The remarkable success of Deep Neural Networks
(DNNs) in supervised learning models, e.g., in com-
puter vision, natural language processing, and recom-
mender systems, is mainly dependent on data anno-
tated by human knowledge (Imran et al., 2016). It
is drastically time-consuming and expensive to label
each instance by a human expert for massive datasets.
Crowdsourcing platforms have emerged as an ef-
ficient and inexpensive solution for the label anno-
tation task. Since workers in the crowd might have
different expertise levels, the quality of annotated la-
bels is not remarkable (Xu et al., 2017; Yan et al.,
2014). Because the data labeled by crowdsourcing is
used to train DNNs, the label quality has a direct im-
pact on the performance and accuracy of the trained
models. Label aggregation methods aim to infer the
correct labels from noisy annotated data such as stem-
a
https://orcid.org/0000-0001-6780-0107
b
https://orcid.org/0000-0003-1144-3707
c
https://orcid.org/0000-0002-4228-6735
ming from crowdsourcing. In other words, label ag-
gregation methods try to provide high quality labels
for training DNNs. We need to mention here, our fo-
cus is on image classification tasks, but our method
has the ability to apply to all datasets that contain
data features. The current solutions consider label
aggregation and image classification as two separate
tasks. At the first step, the label aggregation algo-
rithm performs data labeling to enhance the quality of
the labels generated by crowdsourcing workers. Next,
the provided dataset, including sample and annotated
label by label aggregation method, is used to train
DNN.
The critical point in the process of labeling, then
learning, is the lack of connection between label ag-
gregation and the DNN training. In addition, the cur-
rent label aggregation, as its name says, only uses la-
bel information to find the correct labels without con-
sidering the data features and samples themselves.
In contrast to the current solutions we consider the
label aggregation and DNN training in a collabora-
tive and interrelated manner. In our proposed frame-
work named LABNET, label aggregation algorithms
56
Ghiassi, A., Birke, R. and Chen, L.
LABNET: A Collaborative Method for DNN Training and Label Aggregation.
DOI: 10.5220/0010770400003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 2, pages 56-66
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

and classification tasks work together iteratively and
exchange useful knowledge. As mentioned before,
label aggregation algorithms work based on label in-
formation without taking into account data features.
The data features are used to train DNNs, but their
information can be used to aggregate labels. Since
our method is a collaborative process between train-
ing DNN and labels aggregation, DNN extracts a rep-
resentation of data features to share with the label ag-
gregation algorithm as additional information for in-
creasing the quality of annotated labels. Aggregated
labels are used to train DNN as training data, and
DNN performs the classification task besides features
extraction for aggregation. In other words, our pro-
posed method interleaves label aggregation and clas-
sification task such that the feature extraction part can
be useful to both simultaneously.
The majority of label aggregation methods are
iterative-based algorithms. One of the most well-
known method is Expectation–Maximization (Dawid
and Skene, 1979). The Expectation–Maximization
(EM) algorithm is commonly used in aggregation via
maximizing the likelihood of the data. Prior probabil-
ities are an essential part of calculating the data like-
lihood. Numerous probabilistic and statistics mod-
els (Cousineau and Helie, 2013) have studied the im-
pact of different priors on maximum likelihood and,
consequently, EM algorithms. The error rate of aggre-
gated labels directly depends on prior probabilities.
Hence choosing the wrong prior probability leads to
poor performance of the EM algorithm, and as a re-
sult, the number of incorrectly aggregated labels in-
creases.
In LABNET, DNN has two tasks: 1) the traditional
classification and, 2) features extraction for aggrega-
tion algorithm. We use the output of the last layer of
the DNN, which is a softmax layer, to map data fea-
tures into a probability vector. In other words, LAB-
NET links data features and labels via the DNN soft-
max output and aggregated labels. Hence LABNET
consists of a classifier and label aggregator. The la-
bel aggregator works based on the EM algorithm, and
the classifier is a DNN, e.g., for image classification.
At each iteration, the aggregator provides labels for
input images to train the image classifier. In addition
to learning the image classifier, the classifier repre-
sents each data sample by a softmax vector, which is
considered as the prior probability in the label aggre-
gation algorithm.
Since training the classifier at each iteration of the
EM algorithm would be extremely time-consuming,
we design an algorithm for deciding when to train the
DNN with the latest aggregated labels. After each
iteration of the EM algorithm, we use cross-entropy
function to evaluate the difference between aggre-
gated labels and the classifier prediction at each it-
eration. At each iteration, the value of cross-entropy
is compared to cross-entropy in the previous iteration.
After comparing the cross-entropy of two consecutive
iterations, the training classifier and label aggregation
algorithm will be performed for the next iteration if
the difference is ascending. Otherwise, only label ag-
gregation will be performed.
We evaluate LABNET on two popular image
datasets (Krizhevsky et al., 2009) with synthetic la-
bel noise for each worker. We consider three noise
patterns including uniform, bimodal, and flip noise
under different miss rates for workers. We com-
pare LABNET performance including classifier ac-
curacy and aggregated labels error rate against three
standard methods for aggregation, i.e., EM algorithm
without using softmax as the prior, Minimax Entropy
and Majority Voting. Our results show that LABNET
achieves both high classification accuracy and low la-
bel aggregation error rate against baselines methods
under various scenarios with different worker num-
bers, noise patterns, and noise ratios. LABNET out-
performs other baselines accuracy 2% and 3% on av-
erage for CIFAR-10 and CIFAR-100, respectively. In
terms of label aggregation error rate, LABNET re-
duces error rate by 1% and 3% on average against
the baselines for CIFAR-10 and CIFAR-100, respec-
tively.
The contributions of this paper are summarized as
follows.
• LABNET leverages an interactive method for
training DNN and aggregating labels. LABNET
considers the two as collaborative task. Each
step sends its feedback to each other one to im-
prove the performance of the whole framework,
i.e., high DNN accuracy and low aggregation er-
ror rate.
• We estimate the prior probability to use in the
EM algorithm via the softmax output of the DNN
which benefits of using features and labels to-
gether.
• We design an algorithm to decide when to train
the DNN based on the cross-entropy between the
aggregated labels and the labels predicted by the
DNN in the previous training round.
2 RELATED WORK
Robust training DNNs and label aggregation are well-
studied subject areas. Most of the existing robust
learning methods do not take into account collabora-
LABNET: A Collaborative Method for DNN Training and Label Aggregation
57

tion with label aggregation algorithms.
Robust DNNs consider three different approaches
to distill the impact of wrong labels, including filter-
ing wrong labels (Han et al., 2018; Yu et al., 2019), es-
timation of noise confusion matrix (Hendrycks et al.,
2018; Patrini et al., 2017) and noise tolerant loss func-
tion (Shu et al., 2019; Wang et al., 2019). Robust
training methods (Li et al., 2020; Shu et al., 2019;
Jiang et al., 2018; Ghiassi et al., 2019; Ghiassi et al.,
2021) mainly focus on the learning task considering
robust architecture and loss adjustment. In robust
training, it does not matter how the data is labeled
and by what process. Hence, in robust training label
aggregation is considered as an entirely separate task.
Label aggregation methods mostly use unsuper-
vised solutions. As an example, (Yin et al., 2017)
introduces an unsupervised method using two neu-
ral networks including a classifier and re-constructor
for label aggregation. We can categorize the aggre-
gation methods into two groups. The first group re-
lies on probabilistic inference models (Yang et al.,
2019; Yang et al., 2018), which study the impact of
latent variables on the likelihood of noisy label sam-
ples. (Kim and Ghahramani, 2012; Venanzi et al.,
2014; Simpson et al., 2015; Hong et al., 2021) de-
velop a probabilistic graphical model for label aggre-
gation, and a confusion matrix is considered for eval-
uating each worker. (Liu et al., 2012) works based on
prior approximation via variational inference.
The second group encompasses confusion matrix
based methods. The focus is to find how correct labels
are corrupted to noisy labels by each worker (Dawid
and Skene, 1979). GLAD (Whitehill et al., 2009) is
a binary labeling method that infers the true label and
difficulty of each sample at the same time. Also, Zhou
et al. (Zhou et al., 2012; Zhou et al., 2014) design a
framework that uses minmax entropy estimator and
assigns a different probabilistic distribution to each
sample-worker pair.
Another aspect of label aggregation is to use a
deep neural network for aggregating crowdsourced
responses. As opposed to the existing unsupervised
method, DeepAgg (Gaunt et al., 2016) is a supervised
model. DeepAgg, instead of using Bayesian algo-
rithms, the label aggregation model relies on DNNs
to encode required information for statistical models.
Another aggregation method is based on a disagree-
ment between the provided labels by workers and pre-
dictions of learning algorithm (Khetan et al., 2018).
The aforementioned studies are limited to label
aggregation without taking into account feature space.
In this paper, we show that the use of data represen-
tation in the label aggregation algorithm reduces the
error and increases the quality of the output labels.
Besides, prior arts do not consider the training pro-
cess and relation with the aggregation algorithm. In
other words, there is useful knowledge that can be
shared between the label aggregation and the train-
ing processes. LABNET is the first study that fo-
cuses on model interaction between label aggregation
and training a deep neural network to the best of our
knowledge.
3 METHODOLOGY
Consider the classification and label aggregation
problem having training set with N samples D =
{(x
x
x
i
,y
y
y
i
)}
N
i=1
, where x
x
x
i
is the feature vector of the i
th
sample and y
y
y
i
= {y
1
i
,y
2
i
,...,y
w
i
,...,y
K
i
} is the set of
labels from different workers w = {1, 2, . . . , K} for the
i
th
instance. y
w
i
∈ {0,1}
C
is the corresponding label
vector generated by worker w in the crowdsourcing
setting and C denotes the number of classes.
To label data, it is common practice to use crowd-
sourcing. Crowdsourcing is a cheap and fast method
to label massive data sets compared to labeling by hu-
man experts, but it is less accurate. The accuracy of a
crowd system depends on the ability of inexperienced
workers to identify the correct label. Label aggrega-
tion algorithms are proposed to increase the accuracy
of crowd labels. Thus the aggregated labels are more
accurate than the label sets provided by single work-
ers. After aggregation process, the aggregated labels
ˆ
Y = { ˆy
1
, ˆy
2
,..., ˆy
N
} are used to train a classifier net-
work. We denote the classifier network prediction as
f (x
x
x; θ
θ
θ) where θ
θ
θ are the weights of the classifier net-
work. Since the aggregated labels together with the
samples constitute the training data for the neural net-
work, the accuracy of the trained neural network pre-
dictions depend directly on the accuracy of the aggre-
gated labels.
We propose a method leveraging direct coopera-
tive method the classifier network and the label ag-
gregator. The method first aggregates labels using the
estimated probabilities by the classifier via the soft-
max layer. After label aggregation using the softmax
output as the prior knowledge in the aggregation algo-
rithm, the network is trained via the aggregated labels.
In other words, the label aggregation algorithm and
the classifier exchange helpful knowledge iteratively.
As a result, both the accuracy of the classifier network
and the accuracy of the aggregated labels increase.
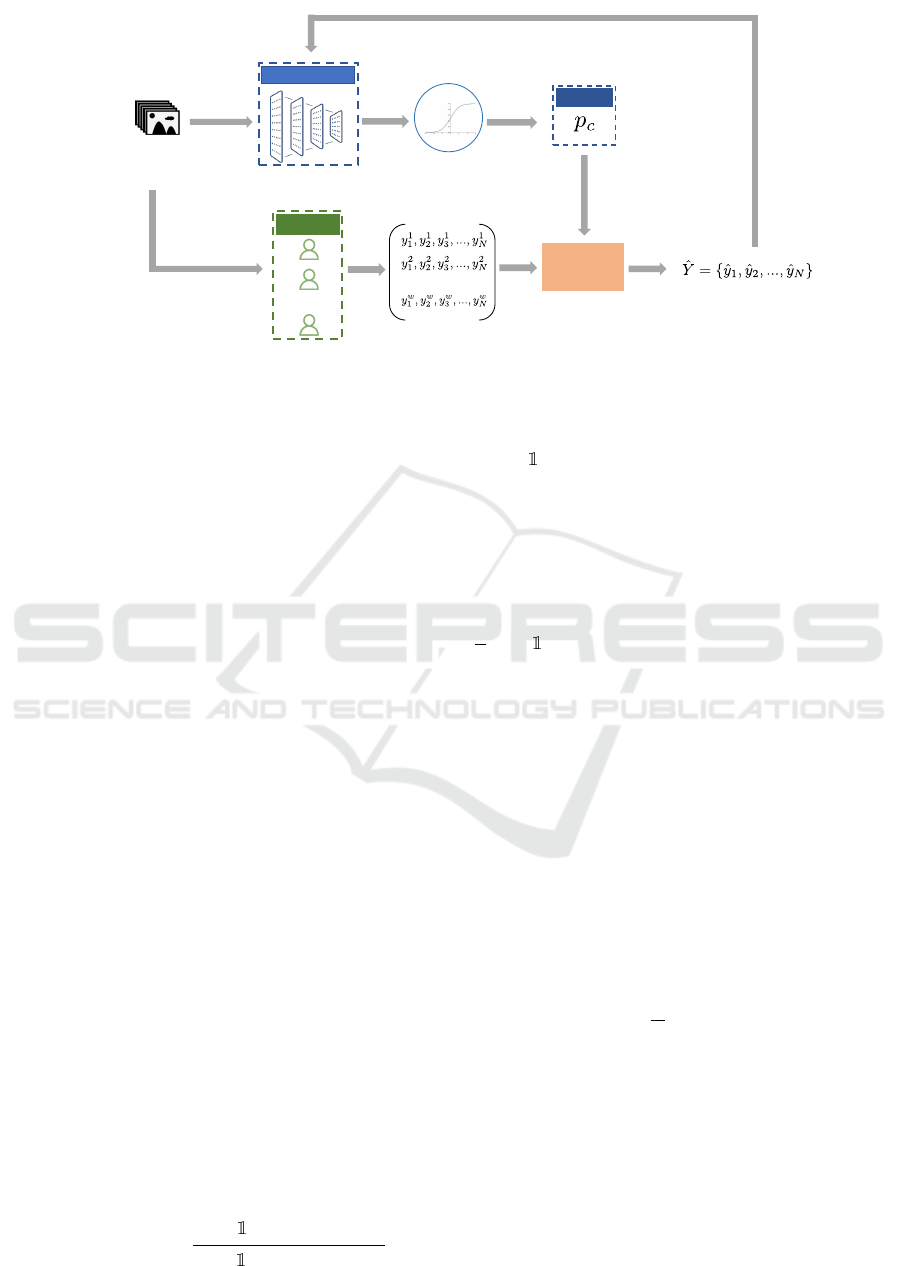
We illustrate the procedure of aggregation and
training the classifier in Figure 1. At the beginning,
each worker assigns a label to each instance based on
its expertise level. In the next step, the label aggre-
gator performs the aggregation task using the EM al-
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
58
Worker
…
Crowdsourcing
Platform
Label
Aggregator
Unlabeled Samples
Aggregated Labels
Image Classifier
Prediction (softmax)
…
The prior
Figure 1: The label aggregation and training DNN scenario.
gorithm. In the first iteration since we have no prior
estimated by the classifier, we use majority voting al-
gorithm to aggregate the labels with which we train
the classifier. After training the classifier, we use it
to infer the softmax vector output for each sample, to
be used as prior by the EM-based aggregation algo-
rithm. EM-based algorithms are commonly used for
label aggregation. EM needs knowledge of the prior
data distribution to estimate the probability of correct-
ness of a label generated by a worker. p
c
denotes the
prior probability of class label c. In LABNET, we esti-
mate p
c
via the predicted class probability by the soft-
max layer of the neural network. Hence the inferred
softmax probability vector from each instance is use-
ful knowledge for the EM algorithm. Vice versa, to
train the DNN, we use the labels provided by the EM
algorithm, which selects the labels having maximum
likelihood among the labels provided by the workers.
3.1 Label Aggregation
We consider the scenario shown in Figure 1. To
each data sample x
x
x
i
corresponds a set of labels y
y
y
i
=
{y
1
i
,y
2
i
,...,y
K
i
} from K different crowd workers. The
label aggregator uses the EM algorithm to estimate
the correct labels. The EM algorithm is an iterative
algorithm, including an E- and an M- step. In the E-
step for each instance i, the algorithm first calculates
the probability that the aggregated label ˆy
i
equals t
given that the label y
w
i
generated by worker w equals
l. P
w
( ˆy
i
| y
w
i
) denotes this probability. Therefore we
have the following expression
P
w
( ˆy
i
= t | y
w
i
= l) =
∑
N
j=1
( ˆy
i
= t & y
w
j
= l)
∑
C
c=1
( ˆy
i
= t & y
w
i
= c)
(1)
where (.) is the indicator function. In Equation (1),
We count the number of times that worker k labels
item i to l when the aggregated label is t over the
number of classes are labeled by worker k when the
aggregated label is t.
The next stage of the EM algorithm needs the
prior probability of each class. In the classic EM
algorithm these probabilities are calculated as p
c
=
1
N
∑
N
i=1
( ˆy
i
= c) where ˆy
i
is the aggregated label and
c is the class label. Thus P = {p
1
, p
2
,..., p
c
,..., p
C
}
is the set of prior probabilities for each class.
In our proposed method, we replace the prior class
probabilities to make them dependent on the features
extracted by the classifier. As anticipated in Figure 1,
we use the softmax output of the classifier prediction
f (x
x
x; θ
θ
θ) as set of prior probabilities. The softmax vec-
tor is computed based on image features. Hence, the
prior probabilities from the softmax vector contain in-
formation on the features of the sample data because
the softmax vector is a representation of the input data
in the form of a probability vector. For label aggre-
gation,we use as prior the predicted class probability
across all samples:
p
c
=
1
N
N
∑
i=1
f
c
(x
x
x
i
;θ
θ
θ). (2)
where f
c
(x
x
x; θ
θ
θ) denotes the softmax value of class c by
the classifier f (x
x
x; θ
θ
θ). After finding the prior probabil-
ity based on the proposed method, the EM algorithm
begins maximizing the data likelihood. In the M-step,
the likelihood q
i,c
of each instance i being of class c
is computed as:
q
i,c
= p
c
×
K
∏
w=1
P
w
( ˆy
i
= c | y
w
i
). (3)
LABNET: A Collaborative Method for DNN Training and Label Aggregation
59
which leverages the Bayes’s theorem. Q
i
=
{q
i,1
,q
i,2
,...,q
i,C
} denotes the set of likelihoods for
each data instance i for all C classes. The aggregated
label is the class c having maximum likelihood:
ˆy
i
= argmax
c
Q
i
. (4)
After the M-step the label aggregator passes the set of
aggregated labels
ˆ
Y = { ˆy
1
, ˆy
2
,..., ˆy
N
} to the training
of the classifier network.
Algorithm 1: LABNET.
1 Input: training set D = {x
x
x,Y }, Epoch E
max
,
Iteration I
max
Initialize randomly θ
θ
θ
2
ˆ
Y = MajorityVoting(Y ) /* Y
i, j
denotes i
th
instance from j
th
worker */
3 Output: The aggregated labels
ˆ
Y , Trained
network f (x
x
x, θ
θ
θ)
4 for i = 1,2,...,N do
5 for w = 1, 2, . . . , K do
6 L[ ˆy
i
][w][y
i
]+ = 1
7 train = True
8 H
0
= 0
9 for each iteration t = 1, 2, . . . , I
max
do
10 if train then
11 for each e = 1, 2, . . . , E
max
do
12 Train f (x
x
x, θ
θ
θ) with (x
x
x,
ˆ
Y );
13 for each c = 1, 2, . . . ,C do
14 P
c
=
1
N
∑
N
i=1
f
c
(x
x
x
i
;θ
θ
θ);
15 else
16 for each c = 1, 2, . . . ,C do
17 P
c
=
1
N
∑
N
i=1
( ˆy
i
= c)
18
˜
Y = ONE-HOT(
ˆ
Y )
19 H
t
= −
1
N
∑
N
i=1
˜y
i
log f (x
x
x
i
i
i
;θ
θ
θ)
20 if H
t
− H
t−1
> 0 then
21 train = True
22 else
23 train = False
24 for i = 1, 2, . . . , N do
25 for w = 1, 2, . . . , K do
26 P
w
( ˆy
i
| y
w
i
) =
∑
N
j=1
L[ ˆy
w
i
][w][y
w
j
]
∑
C
c=1
L[ ˆy
w
i
][w][c]
27 for i = 1, 2, . . . , N do
28 for c = 1, 2, . . . ,C do
29 Q
i,c
= P
c
×
∏
K
w=1
P
w
( ˆy
i
= c | y
w
i
)
30
ˆ
Y = argmax
c
Q
3.2 Classifier Training
The data to train the classifier f (x
x
x; θ
θ
θ) includes fea-
tures vector x
x
x
i
and aggregated labels vector ˆy
i
from
the aggregator. Hence the loss functions for training
can be written as follows:
ℓ = min
θ
θ
θ
1
N
N
∑
i=1
L
CE
( f (x
x
x
i
;θ
θ
θ), ˆy
i
) (5)
where L
CE
(.,.) is the cross entropy loss function:
L
CE
= −
C
∑
j=1
ˆ
y
y
y
j
log f
j
(x
x
x
i
i
i
) (6)
where
ˆ
y
y
y
j
is the aggregated label and f
j
(x
x
x
i
i
i
) is the soft-
max probability for the j
th
class. These probabilities
represent the data features and are fed back to EM al-
gorithm via Equation (2).
3.3 Making Decision to Train DNN
Training the DNN at each iteration of the EM al-
gorithm would be extremely computation intensive
and unpractical. Therefore, we need to carefully
decide when to train to reduce the computational
load while guaranteeing the accuracy of the classi-
fier and correctness of the aggregated labels. At the
end of each round of the EM algorithm we measure
the (dis)agreement between the DNN predicted labels
and the aggregated labels. If the disagreement in-
creases with respect to the previous iteration, we trig-
gers the training of the DNN to prevent further drifts
between the predicted and aggregated labels.
More in detail at each iteration we calculate the
disagreement suing the cross-entropy function as :
H
t
= −
1
N
N
∑
i=1
˜y
i
log f (x
x
x
i
i
i
;θ
θ
θ)
(7)
Equation (7) measures the distance between DNN
predicted and the aggregated labels. Therefore, if
the value of H increases between iteration rounds the
predicetd and aggregated labels are diverging. Hence,
we trigger training of the DNN with the new aggre-
gated labels. Likewise, if the value of H does not
increase between iteration rounds, there is no need to
train DNN at the next iteration.
3.4 End-to-End Training Procedure
Our framework aims to jointly aggregate labels with
low label error rate and train a DNN with high accu-
racy. We describe the whole LABNET and collabo-
ration between DNN and label aggregator in Algo-
rithm 1. In this scenario, we have multiple work-
ers which provide labels for each data instance, thus
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
60

the input dataset is D = {x
x
x,Y } (line 1). To initial-
ize the algorithm we need some aggregated labels to
start with. We derive these via simple Majority Voting
(line 2). Before label aggregation, we calculate the
number of labels obtained from each class after ag-
gregation from each worker named L
C×K×C
(line 4-6)
and force training of the classifier f (x
x
x, θ
θ
θ) (line 7). At
the beginning of each iteration if the train flag is true,
the classifier f (x
x
x, θ
θ
θ) is trained with the aggregated la-
bels
ˆ
Y (line 10-12), then we use the softmax output
of f (x
x
x, θ
θ
θ) as the prior (line 13-14). In case of train
is false, the prior probability for c
th
class in P vector
equals to the average number of occurrence of class
c into aggregated label set (line 16-17). In each iter-
ation, we calculate the need to train based on Equa-
tion (7) (line 18-23).
˜
Y denotes the one-hot vectors of
aggregated labels
ˆ
Y , and ˜y
i
∈
˜
Y is the one-hot vector
for aggregated label of sample i. The label aggregator
method works based on an EM algorithm that starts
with E-step via finding the conditional probability of
aggregated labels given each worker’s generated label
(line 24-26). The M-step includes finding the likeli-
hood of each instance and class label (line 27-29). Fi-
nally, the aggregated label is the class with maximum
probability among all classes (line 30). This proce-
dure repeats for each iteration. The aggregated labels
are used to train the DNN and the DNN softmax out-
put used as prior.
4 EVALUATION
4.1 Experiment Setup
Dataset. We consider two different vision datasets in
our experiments to evaluate the performance of our
algorithm against other methods.
• CIFAR-10 (Krizhevsky et al., 2009): contains
60K 32×32 pixels samples. The labels are classi-
fied into 10 categories. Here we use 50K samples
as training data and 10K for testing data.
• CIFAR-100 (Krizhevsky et al., 2009): is simi-
lar to CIFAR-10 except that its labels are grouped
into 100 categories.
Noise and Workers. To simulate workers with
different level of expertise for annotating images, we
use three different noise patterns in our experiments.
• Uniform: This noise corrupts the true label into
another random label with equal probability.
• Bimodal: This noise corrupts the original class
label around two other targeted classes, each
following truncated normal distribution. The
N
T
(µ,σ,a,b) includes µ that specifies the target
and σ which controls the spread. a and b denote
the class label boundaries.
• Flip: This noise is generated by flipping the orig-
inal class label to another class with a specific
probability.
Baselines. We consider three different baselines
for comparison.
• Majority Voting (MV): is a basic label aggre-
gation method which chooses the label with the
highest consensus.
• Expectation Maximization (EM) (Dawid and
Skene, 1979): is an iterative method to estimate
the confusion matrix of workers by maximizing
the likelihood of observed labels. The diagonal
elements show the probability of aggregated label.
• Minimax Entropy (ME) (Zhou et al., 2012):
This method considers a confusion matrix for
workers and encodes their labeling expertise. In
addition, the ME assigns a vector to items and en-
codes their labeling difficulty. It uses a minimax
entropy approach to estimate the confusion matrix
and vector together.
We implement all algorithms in Python programming
language using Keras version 2.2.4 and TensorFlow
version 1.12.
Parameters. To conduct our experiments on
CIFAR-10 and CFAR-100, we use an 8-layer CNN
with 6 convolutional layers followed by 2 fully con-
nected layers, and ResNet-44, respectively. All net-
works train with SGD with momentum 0.9, weight
decay 5 × 10
3
and an initial learning rate of 0.1. For
CIFAR-10 in each iteration, we train the DNN for 120
epochs, and the learning rate is divided by 10 after 40
and 80 epochs. For CIFAR-100, the total number of
epochs is 150, and the learning rate is divided by 10
after 80 and 120 epochs. For the EM algorithm, the
maximum number of iterations is 10. For bimodal
noise, the center of the distribution around classes
µ
1
= 3.0, µ
2
= 7.0 with variance σ
1
= 1.0, σ
2
= 0.5.
For flip noise in CIFAR-10, we flip similar classes in-
cluding bird → airplane, truck → automobile, deer
→ horse and dog ↔ cat. For CIFAR-100, the 100
classes are categorized into 20 super-classes. Each
super-class consists of 5 sub-classes. We randomly
select two sub-classes in each super-class and flip la-
bels between sub-classes.
Evaluation Metrics. To evaluate the performance
of our proposed model against the baselines, we use
as metric the label aggregation error rate and accuracy
of the trained neural network.
• Aggregation Error Rate: is the percentage of
inferred labels which differ from the true labels.
LABNET: A Collaborative Method for DNN Training and Label Aggregation
61

(a) Uniform (b) Bimodal (c) Flip
Figure 2: Accuracy of DNN on CIFAR-10 under 60% noise ratio and missing ratio 30%.
(a) Uniform (b) Bimodal (c) Flip
Figure 3: Label aggregation error rate on CIFAR-10 under 60% noise ratio and missing ratio 30%.
The true labels are used only for evaluation not
for training.
• Accuracy: Test accuracy is the percentage of cor-
rect predictions by the DNN on the testing data.
4.2 Number of Workers Impact
4.2.1 CIFAR-10
We summarize the results of CIFAR-10 in terms of
DNN’s accuracy and aggregation error rate for a dif-
ferent number of workers in Figure 2 and Figure 3,
respectively. According to Figure 2a, our method out-
performs all competitors through various numbers of
workers for the uniform noise pattern. When the noise
pattern is bimodal in Figure 2b, LABNET is the most
accurate method against MV, EM, and ME except for
the case of 3 workers that Minimax Entropy is the best
one and our method is the second best result. Also,
for the flip noise in Figure 2c, LABNET achieves the
highest accuracy by 65.59% and 70.12% when num-
bers of workers are 9 and 12, respectively. In the case
of 3 and 6 workers, Minimax Entropy achieves the
best accuracy by 38.88% and 64.24% test accuracy.
Another observation worth mentioning is that the test
accuracy increases with the number of workers for all
cases. In general for LABNET, increasing the num-
ber of workers has the highest and lowest impacts on
the classifier accuracy for the flip and uniform noise
patterns, respectively.
We compare aggregation label error rate in Fig-
ure 3 for three different noise patterns over various
numbers of workers. For uniform noise pattern shown
in Figure 3a, LABNET achieves the lowest error rate
against other rivals by 58.93%, 36.87%, 27.74% and
19.53% for 3, 6, 9 and 12 workers, respectively.
The direct impact of aggregation error rate on
DNN accuracy is shown in Figure 3b and Figure 3c.
The Minimax Entropy has lowest error rate with 3
workers in bimodal noise pattern and the highest
DNN accuracy in Figure 3b and Figure 2b, respec-
tively. Also LABNET achieves the best error rate re-
sults for 6, 9 and 12 workers against the baselines.
Furthermore, we see the same pattern for flip noise in
Figure 2c and Figure 3c which in Minimax Entropy
performs better than other baselines when the number
of workers equals 3 and 6. In addition, the worst re-
sults belong to MV that is the least accurate trained
DNN among all baselines. For the case of 9 and 12
workers, LABNET achieves 32.45% and 25.20% ag-
gregation error rate, respectively, which is the best
method compared to MV, EM, and Minimax Entropy.
The highest impact of increasing workers on error rate
belongs to the flip noise pattern with a reduction of
39.59% for LABNET.
4.2.2 CIFAR-100
CIFAR-100 is more challenging than CIFAR-10 due
to the higher number of classes. The accuracy of
DNN and label aggregation error rate results are
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
62
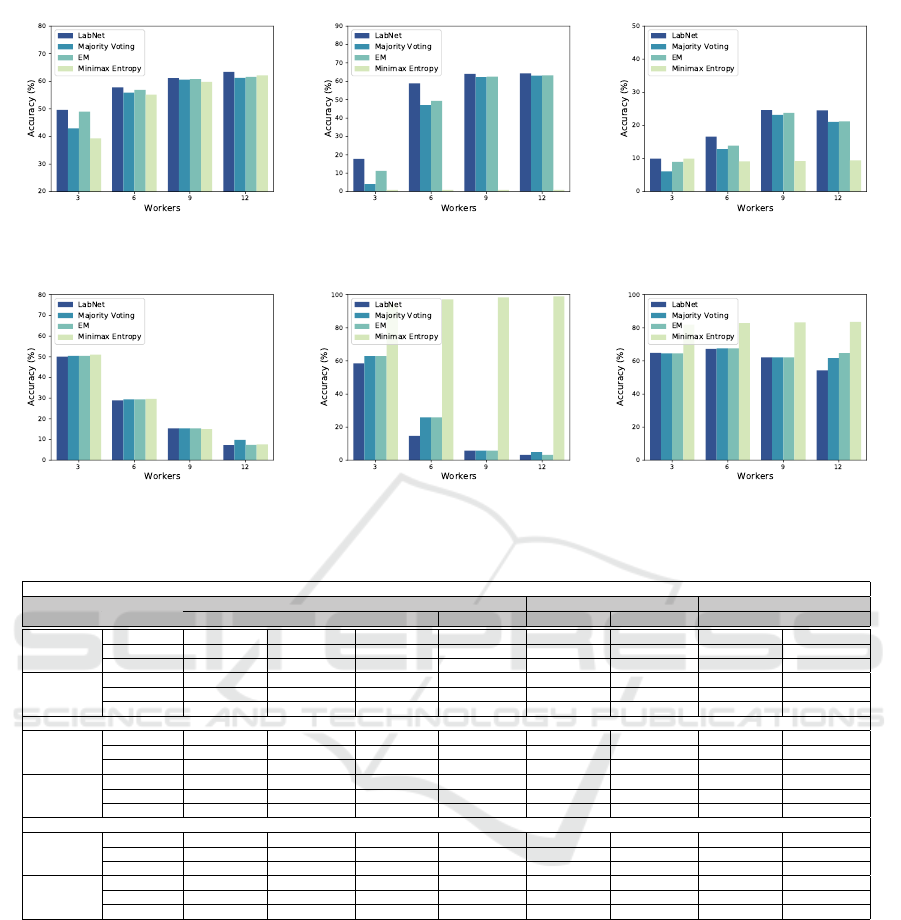
(a) Uniform (b) Bimodal (c) Flip
Figure 4: Accuracy of DNN on CIFAR-100 under 60% noise ratio and missing ratio 30%.
(a) Uniform (b) Bimodal (c) Flip
Figure 5: Label aggregation error rate on CIFAR-100 under 60% noise ratio and missing ratio 30%.
Table 1: Accuracy and error rate for different missing rate on CIFAR-10 with 60% noise ratio.
Noise pattern = Uniform
LABNET MV EM Minimax Entropy
# of Worker Missing rate
Accuracy (%) Error rate (%) Accuracy (%) Error rate (%) Accuracy (%) Error rate (%) Accuracy (%) Error rate (%)
3
0.0 74.62 ± 0.32 54.51 ± 0.10 71.48 ± 0.29 55.93 ± 0.0 66.17 ± 0.33 59.07 ± 0.12 72.25 ± 0.31 54.87 ± 0.16
0.1 74.11 ± 0.40 56.59 ± 0.05 71.31 ± 0.22 56.75 ± 0.0 70.15 ± 0.38 57.58 ± 0.05 74.17 ± 0.52 56.28 ± 0.08
0.3 73.02 ± 0.25 58.91 ± 0.03 70.44 ± 0.19 60.28 ± 0.0 63.26 ± 0.28 61.17 ± 0.08 71.26 ± 0.19 58.99 ± 0.10
9
0.0 83.59 ± 0.52 20.75 ± 0.04 81.75 ± 0.38 21.26 ± 0.0 82.12 ± 0.42 20.88 ± 0.05 81.70 ± 0.62 21.15 ± 0.04
0.1 83.31 ± 0.15 20.84 ± 0.03 81.07 ± 0.22 20.96 ± 0.0 82.51 ± 0.13 21.16 ± 0.02 70.85 ± 0.66 21.47 ± 0.09
0.3 81.35 ± 0.19 27.71 ± 0.04 78.72 ± 0.21 33.31 ± 0.0 80.05 ± 0.31 27.71 ± 0.11 80.21 ± 0.27 27.98 ± 0.02
Noise pattern = Bimodal
3
0.0 76.69 ± 0.31 34.09 ± 0.06 72.44 ± 0.42 44.63 ± 0.0 52.18 ± 0.26 50.71 ± 0.08 78.05 ± 0.38 31.76 ± 0.05
0.1 76.24 ± 0.15 34.49 ± 0.02 73.40 ± 0.37 43.77 ± 0.0 47.03 ± 0.43 54.14 ± 0.07 77.22 ± 0.27 33.79 ± 0.04
0.3 75.39 ± 0.37 35.15 ± 0.03 71.83 ± 0.17 44.92 ± 0.0 48.29 ± 0.36 52.81 ± 0.03 76.44 ± 0.56 33.94 ± 0.11
9
0.0 87.75 ± 0.21 4.19 ± 0.02 84.43 ± 0.33 11.56 ± 0.0 85.05 ± 0.20 8.51 ± 0.05 86.05 ± 0.18 5.43 ± 0.02
0.1 87.44 ± 0.11 4.2 ± 0.02 83.84 ± 0.34 11.76 ± 0.0 84.55 ± 0.31 8.72 ± 0.04 85.42 ± 0.29 6.37 ± 0.02
0.3 85.52 ± 0.38 7.53 ± 0.01 81.83 ± 0.46 22.86 ± 0.0 84.88 ± 0.25 7.56 ± 0.03 84.47 ± 0.30 9.41 ± 0.04
Noise pattern = Flip
3
0.0 40.47 ± 0.34 59.17 ± 0.05 30.75 ± 0.29 64.79 ± 0.0 34.73 ± 0.25 64.78 ± 0.02 51.34 ± 0.49 50.39 ± 0.09
0.1 39.89 ± 0.16 59.32 ± 0.03 31.07 ± 0.39 64.79 ± 0.0 32.19 ± 0.10 64.78 ± 0.09 45.76 ± 0.67 55.89 ± 0.08
0.3 38.92 ± 0.37 60.93 ± 0.01 25.15 ± 0.66 68.03 ± 0.0 31.34 ± 0.26 64.80 ± 0.07 38.82 ± 0.41 60.95 ± 0.04
9
0.0 64.65 ± 0.10 28.56 ± 0.03 18.20 ± 0.43 73.37 ± 0.0 64.39 ± 0.23 30.62 ± 0.02 64.78 ± 0.36 28.43 ± 0.09
0.1 64.64 ± 0.31 29.56 ± 0.02 21.93 ± 0.32 73.37 ± 0.0 64.19 ± 0.53 30.64 ± 0.08 64.21 ± 0.22 29.95 ± 0.12
0.3 64.89 ± 0.69 31.45 ± 0.08 27.94 ± 0.19 70.96 ± 0.0 63.01 ± 0.40 32.33 ± 0.04 63.54 ± 0.37 32.29 ± 0.08
shown in Figure 4 and Figure 5, respectively. The first
important observation through the results is the poor
performance of Minimax Entropy for CIFAR-100 be-
cause, for a large number of classes, this method eas-
ily converges to the wrong local optimum. Accord-
ing to Figure 4, the bimodal noise pattern is the most
straightforward pattern, and flip noise is the most
complex one for classification and labels aggregation.
As shown in Figure 4a, LABNET achieves the best
accuracy among all methods. The highest difference
between the accuracy of LABNET and second best
method is 1.5% for 12 workers and the least one is
0.4% for 9 workers. For bimodal noise in Figure 4b,
LABNET achieves the highest accuracy for all the sce-
narios with different numbers of workers. The best
accuracy of LABNET equals 64.28% with 12 workers.
In addition, the test accuracy for 3, 6, and 9 workers
are 17.80%, 58.90%, and 63.98%, respectively. Since
the flip noise is the most difficult noise pattern, the
best accuracy of LABNET is 24.73% with 12 work-
ers. Based on the Figure 4c, LABNET outperforms
all the baselines. In LABNET, increasing the num-
ber of workers from 3 to 12 improves the classifier
accuracy 46.48% for the bimodal noise significantly
rather than 13.81% and 14.56% for the uniform and
flip noise patterns, respectively.
Figure 5 summarizes the aggregation error rate of
our proposed method and other baselines over differ-
LABNET: A Collaborative Method for DNN Training and Label Aggregation
63
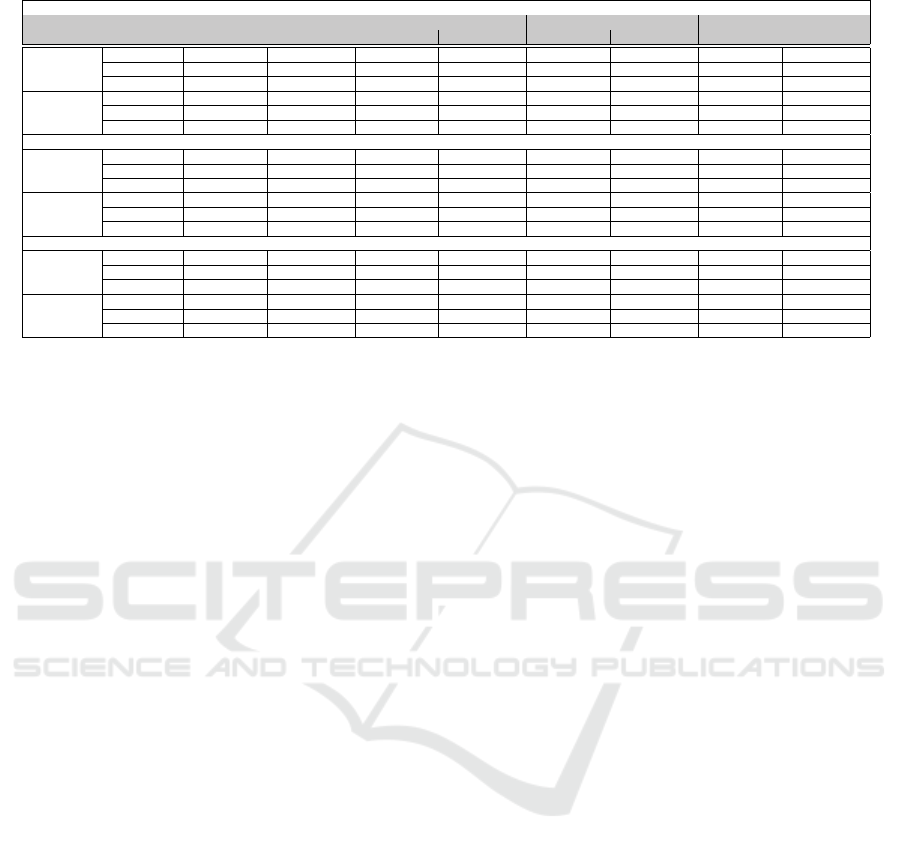
Table 2: Accuracy and error rate for different missing rate on CIFAR-100 with 60% noise ratio.
Noise pattern = Uniform
LABNET MV EM Minimax Entropy
# of Worker Missing rate
Accuracy (%) Error rate (%) Accuracy (%) Error rate (%) Accuracy (%) Error rate (%) Accuracy (%) Error rate (%)
3
0.0 48.83 ± 0.28 49.53 ± 0.05 42.89 ± 0.53 50.48 ± 0.0 48.21 ± 0.35 50.37 ± 0.04 39.64 ± 0.28 51.12 ± 0.02
0.1 48.62 ± 0.18 49.55 ± 0.03 42.50 ± 0.29 50.58 ± 0.0 48.03 ± 0.42 50.41 ± 0.06 39.85 ± 0.35 50.92 ± 0.03
0.3 49.65 ± 0.18 50.02 ± 0.03 42.48 ± 0.47 50.64 ± 0.02 48.05 ± 0.59 50.39 ± 0.04 39.31 ± 0.33 51.09 ± 0.03
9
0.0 64.20 ± 0.16 8.17 ± 0.02 62.14 ± 0.38 8.35 ± 0.0 63.43 ± 0.27 8.33 ± 0.03 62.19 ± 0.14 8.34 ± 0.02
0.1 63.35 ± 0.31 8.19 ± 0.01 61.72 ± 0.41 8.38 ± 0.0 63.21 ± 0.28 8.36 ± 0.02 62.15 ± 0.25 8.38 ± 0.05
0.3 61.16 ± 0.22 15.34 ± 0.02 60.53 ± 0.25 15.42 ± 0.0 60.73 ± 0.39 15.40 ± 0.03 59.78 ± 0.46 15.52 ± 0.05
Noise pattern = Bimodal
3
0.0 19.34 ± 0.21 54.72 ± 0.03 11.21 ± 0.16 62.86 ± 0.0 11.19 ± 0.36 62.86 ± 0.03 1.05 ± 0.12 92.73 ± 0.04
0.1 18.93 ± 0.27 55.18 ± 0.02 11.85 ± 0.48 62.89 ± 0.0 11.91 ± 0.31 62.87 ± 0.06 1.09 ± 0.17 95.37 ± 0.03
0.3 17.82 ± 0.24 58.49 ± 0.03 4.12 ± 0.31 62.88 ± 0.0 11.32 ± 0.42 62.89 ± 0.04 1.04 ± 0.29 95.38 ± 0.03
9
0.0 64.89 ± 0.43 3.15 ± 0.03 64.11 ± 0.26 3.19 ± 0.0 64.15 ± 0.28 3.16 ± 0.04 1.03 ± 0.10 98.86 ± 0.02
0.1 64.53 ± 0.14 3.15 ± 0.02 63.20 ± 0.43 3.18 ± 0.0 63.82 ± 0.37 3.17 ± 0.02 1.04 ± 0.09 98.91 ± 0.03
0.3 63.98 ± 0.29 5.76 ± 0.02 62.27 ± 0.36 5.89 ± 0.0 62.48 ± 0.42 5.87 ± 0.02 1.03 ± 0.11 98.39 ± 0.02
Noise pattern = Flip
3
0.0 11.43 ± 0.28 64.53 ± 0.03 8.88 ± 0.16 64.54 ± 0.0 8.95 ± 0.43 64.54 ± 0.02 10.02 ± 0.33 81.84 ± 0.02
0.1 10.65 ± 0.42 64.53 ± 0.03 9.12 ± 0.28 64.55 ± 0.0 9.14 ± 0.37 64.54 ± 0.01 9.92 ± 0.10 81.84 ± 0.03
0.3 9.98 ± 0.25 64.83 ± 0.02 6.14 ± 0.31 64.91 ± 0.0 8.99 ± 0.20 64.90 ± 0.01 9.76 ± 0.41 81.85 ± 0.09
9
0.0 25.68 ± 0.46 61.87 ± 0.02 22.06 ± 0.24 63.64 ± 0.0 22.63 ± 0.16 63.62 ± 0.05 9.38 ± 0.57 84.06 ± 0.04
0.1 25.05 ± 0.17 61.95 ± 0.02 21.49 ± 0.40 63.65 ± 0.0 22.58 ± 0.39 63.63 ± 0.02 9.18 ± 0.21 84.07 ± 0.03
0.3 24.65 ± 0.26 62.11 ± 0.01 21.11 ± 0.33 63.77 ± 0.0 22.38 ± 0.14 63.72 ± 0.04 9.17 ± 0.52 83.27 ± 0.03
ent numbers of workers. With respect to the test accu-
racy results in Figure 4, the most accurate method has
the lowest label aggregation error rate in all the cases
with different noise patterns and numbers of work-
ers. For uniform noise, LABNET achieves 50.01%
error rate in the case of 3 workers, which is the low-
est among all methods, although performance of each
method are close to each other. As we mentioned
before, Minimax Entropy suffers from poor perfor-
mance on dataset with large number of classes un-
der bimodal and flip noise patterns which is shown in
Figure 5b and Figure 5c. Through all the noise pat-
terns and different number of workers, LABNET per-
forms as the best method against baselines with gaps
of 7.33%, 3.23% and 54.21% error rate under uni-
form, bimodal and flip noise pattern with 12 workers,
respectively. According to the results of LABNET in
Figure 5, increasing the number of workers has the
most effect on reducing the error for bimodal noise
pattern.
4.3 Impact of Missing Rate on DNN
Accuracy and Label Aggregation
Error Rate
We extensively evaluate LABNET, MV, EM, and Min-
imax Entropy on CIFAR-10 and CIFAR-100, with la-
bel missing rates ranging from 0.0 to 0.3. We also
consider two different numbers of workers: 3 and 9.
We summarize the average test accuracy and label ag-
gregation error rate across three runs for CIFAR-10
and CIFAR-100 in Table. 1 and Table. 2, respectively.
CIFAR-10. As shown in Table. 1, in the case of
uniform noise pattern, LABNET achieves the highest
accuracy in all cases. As we expect, variation of la-
bel missing rate affects DNN accuracy and label ag-
gregation error rate. Increasing the missing rate re-
duces the accuracy of DNN and increases the label
aggregation error rate. In addition, more workers en-
hance the DNN accuracy. According to the results,
we observe an 8.97%, 9.2%, and 8.33% increase in
accuracy by adding six workers to our method for the
missing rate 0.0, 0.1 and 0.3 under uniform noise pat-
tern, respectively. For the case of bimodal noise, Min-
imax Entropy is the best method when three workers
are available. However, with nine workers, LABNET
outperforms all baselines in terms of accuracy and er-
ror rate. According to the results in Table. 1, LAB-
NET performs better aggregation on higher missing
rate under flip noise pattern. Consequently, the ac-
curacy of DNN is higher than other methods in the
higher missing rate.
CIFAR-100. Since CIFAR-100 contains a more
significant number of classes than CIFAR-10, label
aggregation is a challenging task. According to the re-
sults in Table. 2, LABNET achieves the highest DNN
accuracy and the lowest aggregation error rate against
other baselines under uniform, bimodal, and flip noise
patterns. The impact of missing rate variation on ac-
curacy and error rate for CIFAR-100 is the same as
the impact of missing rate on CIFAR-10. Another ob-
servation worth mentioning is the significant enhance-
ment in Bimodal noise accuracy when the number of
workers changes from 3 to 9. Also, the difference
between LABNET accuracy and other baselines for
CIFAR-100 is significantly higher than the results on
CIFAR-10. There exist the same observations for la-
bels aggregation error rate. In other words, our pro-
posed model is significantly more accurate on a more
complex dataset under bimodal and flip noise. Fur-
thermore, Minimax Entropy performs label aggrega-
tion poorly for various missing rates equal to 0.0, 0.1,
and 0.3 because of getting stuck in the local optimum
for the case of the biased dataset with a large number
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
64

of classes to a specific class. In case of bimodal and
flip noise patterns, EM achieves second best results in
terms of accuracy and error rate.
5 CONCLUSION
Motivated by the need for accurate data labeling of
crowd workers and using the provided labels for train-
ing DNNs, we design an iterative method for label
aggregation and training DNN together. The prior art
performs label aggregation and training classifier in
two separate processes. We propose LABNET that
considers aggregation and training in contact with
each other. In our model, the classifier extracts the
prior knowledge for passing to the aggregation algo-
rithm. Also, the estimated correct labels by aggrega-
tion algorithm are used to train the classifier. In ad-
dition, we design an algorithm to decide when DNN
needs to be trained through the aggregation algorithm
iteration. Compared to the baselines, LABNET out-
performs in most scenarios, especially for in challeng-
ing scenarios with large number of classes.
ACKNOWLEDGEMENTS
This work has been partly funded by the Swiss
National Science Foundation NRP75 project
407540 167266.
REFERENCES
Cousineau, D. and Helie, S. (2013). Improving maximum
likelihood estimation using prior probabilities: A tuto-
rial on maximum a posteriori estimation and an exam-
ination of the weibull distribution. Tutorials in Quan-
titative Methods for Psychology, 9(2):61–71.
Dawid, A. P. and Skene, A. M. (1979). Maximum likeli-
hood estimation of observer error-rates using the em
algorithm. Applied statistics, pages 20–28.
Gaunt, A., Borsa, D., and Bachrach, Y. (2016). Train-
ing deep neural nets to aggregate crowdsourced re-
sponses. In Proceedings of the Thirty-Second Con-
ference on Uncertainty in Artificial Intelligence. AUAI
Press, page 242251.
Ghiassi, A., Birke, R., Han, R., and Chen, L. Y. (2021).
Labelnet: Recovering noisy labels. In International
Joint Conference on Neural Networks (IJCNN), pages
1–8. IEEE.
Ghiassi, A., Younesian, T., Zhao, Z., Birke, R., Schiavoni,
V., and Chen, L. Y. (2019). Robust (deep) learning
framework against dirty labels and beyond. In Inter-
national Conference on Trust, Privacy and Security in
Intelligent Systems and Applications (TPS-ISA), pages
236–244. IEEE.
Han, B., Yao, Q., Yu, X., Niu, G., Xu, M., Hu, W., Tsang,
I., and Sugiyama, M. (2018). Co-teaching: Robust
training of deep neural networks with extremely noisy
labels. In NeurIPS, pages 8527–8537.
Hendrycks, D., Mazeika, M., Wilson, D., and Gimpel, K.
(2018). Using trusted data to train deep networks on
labels corrupted by severe noise. In NeurIPS, pages
10456–10465.
Hong, C., Ghiassi, A., Zhou, Y., Birke, R., and Chen,
L. Y. (2021). Online label aggregation: A variational
bayesian approach. In Web Conference 2021, WWW
’21, page 1904–1915. ACM.
Imran, M., Mitra, P., and Castillo, C. (2016). Twitter as
a lifeline: Human-annotated twitter corpora for NLP
of crisis-related messages. In Calzolari, N., Choukri,
K., Declerck, T., Goggi, S., Grobelnik, M., Maegaard,
B., Mariani, J., Mazo, H., Moreno, A., Odijk, J., and
Piperidis, S., editors, Language Resources and Evalu-
ation LREC. European Language Resources Associa-
tion (ELRA).
Jiang, L., Zhou, Z., Leung, T., Li, L., and Fei-Fei, L. (2018).
Mentornet: Learning data-driven curriculum for very
deep neural networks on corrupted labels. In ICML,
pages 2309–2318.
Khetan, A., Lipton, Z. C., and Anandkumar, A. (2018).
Learning from noisy singly-labeled data. In ICLR.
Kim, H.-C. and Ghahramani, Z. (2012). Bayesian classifier
combination. In Artificial Intelligence and Statistics,
pages 619–627.
Krizhevsky, A., Nair, V., and Hinton, G. (2009). Cifar-
10/100 (Canadian Institute for Advanced Research).
Li, J., Socher, R., and Hoi, S. C. (2020). Dividemix: Learn-
ing with noisy labels as semi-supervised learning. In
ICLR.
Liu, Q., Peng, J., and Ihler, A. T. (2012). Variational infer-
ence for crowdsourcing. In Advances in neural infor-
mation processing systems, pages 692–700.
Patrini, G., Rozza, A., Krishna Menon, A., Nock, R., and
Qu, L. (2017). Making deep neural networks robust
to label noise: A loss correction approach. In IEEE
CVPR, pages 1944–1952.
Shu, J., Xie, Q., Yi, L., Zhao, Q., Zhou, S., Xu, Z., and
Meng, D. (2019). Meta-weight-net: Learning an ex-
plicit mapping for sample weighting. In NIPS, pages
1919–1930.
Simpson, E. D., Venanzi, M., Reece, S., Kohli, P., Guiver,
J., Roberts, S. J., and Jennings, N. R. (2015). Lan-
guage understanding in the wild: Combining crowd-
sourcing and machine learning. In Proceedings of
the 24th international conference on world wide web,
pages 992–1002. International World Wide Web Con-
ferences Steering Committee.
Venanzi, M., Guiver, J., Kazai, G., Kohli, P., and Shokouhi,
M. (2014). Community-based bayesian aggregation
models for crowdsourcing. In Proceedings of the 23rd
international conference on World wide web, pages
155–164. ACM.
LABNET: A Collaborative Method for DNN Training and Label Aggregation
65

Wang, Y., Ma, X., Chen, Z., Luo, Y., Yi, J., and Bailey, J.
(2019). Symmetric cross entropy for robust learning
with noisy labels. In IEEE ICCV, pages 322–330.
Whitehill, J., Wu, T.-f., Bergsma, J., Movellan, J. R., and
Ruvolo, P. L. (2009). Whose vote should count more:
Optimal integration of labels from labelers of un-
known expertise. In Advances in neural information
processing systems, pages 2035–2043.
Xu, Z., Liu, Y., Xuan, J., Chen, H., and Mei, L. (2017).
Crowdsourcing based social media data analysis of ur-
ban emergency events. Multimedia Tools and Appli-
cations, 76(9):11567–11584.
Yan, Y., Rosales, R., Fung, G., Subramanian, R., and Dy, J.
(2014). Learning from multiple annotators with vary-
ing expertise. Machine learning, 95(3):291–327.
Yang, J., Drake, T., Damianou, A., and Maarek, Y. (2018).
Leveraging crowdsourcing data for deep active learn-
ing an application: Learning intents in alexa. In Pro-
ceedings of the 2018 World Wide Web Conference,
pages 23–32.
Yang, J., Smirnova, A., Yang, D., Demartini, G., Lu, Y.,
and Cudr
´
e-Mauroux, P. (2019). Scalpel-cd: lever-
aging crowdsourcing and deep probabilistic modeling
for debugging noisy training data. In The World Wide
Web Conference, pages 2158–2168.
Yin, L., Han, J., Zhang, W., and Yu, Y. (2017). Aggre-
gating crowd wisdoms with label-aware autoencoders.
In Proceedings of the 26th International Joint Con-
ference on Artificial Intelligence, pages 1325–1331.
AAAI Press.
Yu, X., Han, B., Yao, J., Niu, G., Tsang, I. W., and
Sugiyama, M. (2019). How does disagreement help
generalization against label corruption? In ICML,
pages 7164–7173.
Zhou, D., Basu, S., Mao, Y., and Platt, J. C. (2012). Learn-
ing from the wisdom of crowds by minimax entropy.
In Advances in Neural Information Processing Sys-
tems, pages 2195–2203.
Zhou, D., Liu, Q., Platt, J., and Meek, C. (2014). Aggre-
gating ordinal labels from crowds by minimax condi-
tional entropy. In International Conference on Ma-
chine Learning, pages 262–270.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
66
