
Research on Annual Runoff Forecast of Shaanxi Section of Hanjiang
River based on Multi-model
Shuni He
1
, Na Wei
1,
*, Linshun Cao
2
, Zhi Zhang
3
, Shaofei Zhang
1
, Feng Yang
1
and Yating Gao
1
1
State Key Laboratory of Eco-hydraulics in Northwest Arid Region, Xi’an University of Technology, Xi’an, Shaanxi
710048, China
2
Hanjiang-to-Weihe River Valley Water Diversion Project Construction Co., LTD., Shananxi Province, China
3
Jiangxi Wuda Yangfan Technology Co., Ltd, Nanchang, Jiangxi 330029, China
Keywords: Runoff Prediction,
ARIMA model, MGF model, Grey dynamic model, DenseNet model, Hanjiang River
Abstract: Because of its strong non-stationary and nonlinear characteristics, the runoff series bring serious challenges
to the accurate and reasonable prediction of runoff. In the past, the research direction of runoff prediction is
mainly the improvement of a single model or mixed model prediction, which often ignores the model’s
applicability to the actual situation. From the perspective of multiple models, based on the runoff series data
of Yangxian Station in Shaanxi Section of Han River, this paper adopts the ARIMA model, the MGF model,
the Grey dynamic model and the DenseNet model to forecast the annual runoff of Yangxian Station. The
prediction results are compared and analyzed to select the model most suitable for Yangxian Station among
the four models. The results show that the DenseNet model is the most suitable for the runoff prediction
activities of the selected watershed. Through the applicability analysis of runoff prediction model, a
scientific and reliable runoff prediction can be obtained, which provides a scientific basis for water
resources management and allocation, water resources development and utilization.
1 INTRODUCTION
In recent years, human activities have led to
significant climate change, changes in precipitation
forms, and changes in natural watershed
environment, which makes the change of runoff
more complex (Lei et al., 2003). The prediction of
runoff series becomes more and more difficult.
Under the conditions of existing station network,
instruments and equipment and observation
technology, the temporal and spatial changes of
various information are difficult to reflect. In
addition, affected by objective conditions such as
natural factors, it is bound to cause measurement
errors of various information. There are many
research results of the existing runoff prediction
models, but different models have their own
applicability
(Liang et al., 2020). When predicting
the runoff of the basin, the most appropriate model is
selected from different models to obtain higher
runoff prediction accuracy, which has important
practical significance for accurately predicting the
runoff and is also a problem to be solved in
Hydrological Prediction.
There are many uncertainties and complexities in
runoff time series. At present, people mostly realize
runoff prediction through various hydrological model
methods, including time series prediction model,
nonlinear model and prediction model based on
intelligent algorithm (Labat et al., 2004; Li J et al.,
2008). Time series analysis (Hsu et al., 1995; Dutta et
al., 2012) is an earlier and more mature analysis
method. It studies the change law of prediction with
time and establishes a time series prediction model to
predict. For example, ARIMA model proposed by
box and Jenkins (Du & Ma, 2018; Liu, 2011; Sun et
al., 2013). The mean generating function model
proposed by Wei Fengying et al (Wei & Cao, 1990).
Because the runoff variation characteristics often
show highly nonlinear characteristics, nonlinear
models appear, such as the Grey prediction model
based on Grey system theory (Liu & Yang, 2015;
Deng, 1982a; Deng, 1982b). With the development of
computer technology and mathematical theory,
intelligent algorithms have also been applied to
runoff prediction, such as machine learning, data
mining and so on. For example, DenseNet model, a
machine learning model based on neural network
He, S., Wei, N., Cao, L., Zhang, Z., Zhang, S., Yang, F. and Gao, Y.
Research on Annual Runoff Forecast of Shaanxi Section of Hanjiang River Based on Multi-model.
In Proceedings of the 7th International Conference on Water Resource and Environment (WRE 2021), pages 377-388
ISBN: 978-989-758-560-9; ISSN: 1755-1315
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
377
theory (Gu, 2008).
There are many models for runoff prediction, but
the characteristics and emphases of different
prediction models are different, and the applicable
conditions are different. There is no best model for
watershed runoff prediction, only suitable models. In
addition, the prediction results of a single prediction
model are lack of comparison, so it is difficult to
obtain accurate and satisfactory results. Therefore, in
the runoff prediction of the basin, it is necessary to
comprehensively compare the prediction results of
different models in order to select a more appropriate
prediction model. From the perspective of multi
model, taking Yangxian station in Shaanxi section of
Hanjiang River as the representative station, this
study uses ARIMA model, MGF model, Grey
dynamic model and DenseNet model to predict the
annual runoff. The results are compared, in order to
select the most suitable runoff prediction model for
Shaanxi section of Hanjiang River.
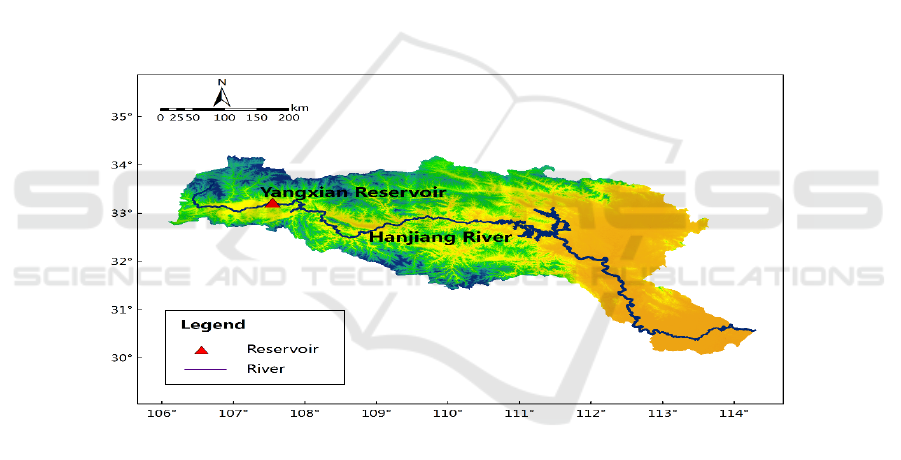
2 STUDY AREA AND DATA
The Han River is the largest tributary of the Yangtze
River, also known as the Hanshui, originating from
Panzhong Mountain in Ningqiang County, Shaanxi
Province. The main stream of the Han River is 1,577
km in length, with a drainage area of 159,000 km².
The section from the source of the upper reaches of
the Han River to the Baihe River belongs to Shaanxi
Province, with a total length of 652 km and a
catchment area of 59,100 km², accounting for about
33% of the total area of Shaanxi Province. The water
volume of this area accounts for about 66.7% of the
entire Shaanxi province, and the river narrow here,
the water level drop is large and the water energy
resources are abundant (Xiong & Chen, 1987).
Yangxian Station on Shaanxi section of Han River at
Daqiaotou, Chengguan Town, Yangxian County, is
an important national control station with a
catchment area of 14,484 km² and a distance of
1,316 km from the estuary (Figure 1).
Figure 1: location of Yangxian station in Shaanxi section of Hanjiang River.
Due to the strong and ever-changing role of
human activities, the natural law of hydrology is
changing anytime and anywhere, so that the
observed hydrometeorological data are not
representative enough, and some data may be
"polluted". These factors will produce errors and
affect the accuracy of prediction results. Therefore, a
long enough hydrological series is needed to reduce
the prediction error. This study mainly collects the
annual runoff data of Yangxian station in Shaanxi
section of Hanjiang River from 1967 to 2014, and
forecasts and analyzes the annual runoff of Yangxian
station based on the 48-year annual runoff data.
3 RESEARCH METHOD
3.1 ARIMA Model
The ARIMA model is also known as the summation
autoregressive moving average model and is widely
used in time series forecasting. The basic idea of the
model is to treat a given time sequence as a
non-random sequence, and use the past sequence
value to make predictions by analyzing the
information of the sequence for model identification,
ordering and determining the model (Sun, 2012; Liu
et al., 2006; Schreider et al., 1997). The general
structure of the ARIMA model is:
WRE 2021 - The International Conference on Water Resource and Environment
378

2
()(1 ) ()
() 0, () ,( ) 0( )
()0( )
d
tt
tt ts
ts
BBx B
EVar E st
Est
(1)
Where
1
() 1 , 0
p
pp
BB B
;
1
() 1 , 0
q
qq
BB B
;
{𝜀
is the white noise sequence.
Where p is the AR term, which represents the
autoregressive order of the model; q is the MA term,
which represents the moving average order of the
model; d is the Integrated term, which represents the
number of differences between the model and the
time series.
3.2 MGF Model
The MGF model is a time series forecasting method.
The model is based on the time series memory idea
and constructs an extended series for forecasting.
The advantage of this model is that multi-step
prediction may be performed, and the sequence of
extrema has a good predictive result (Sun, 2012).
The basic steps of the model establishment are:
Firstly, the maximum number of mean generation
functions of MGF model is calculated according to
the length data of time series and the actual situation;
Then, the values of each mean generating function
are obtained and the L-order mean generating
triangular matrix is constructed; Then, according to
the periodic extension formula, the constructed
triangular matrix is extended to obtain the extension
matrix with length N, forming l prediction factor
sequences; Finally, several factors closely related to
the prediction object are selected through
cross-correlation analysis, or all factors are
considered, and the factors are selected through
stepwise regression to establish a multiple regression
model for prediction (Cui & Ye, 2009). After the
model is established, the significance of the
established model needs to be tested, and the tested
model can be used for prediction.
The basic principle of the model is: assuming
that there is a time series 𝑋𝑥
,𝑥
,𝑥
,⋯,𝑥
,
construct a mean generating function for the series
according to the following formula:
1
0
1
() ( )
j
n
l
j
l
Xi Xi lj
n
(2)
where 𝑛
max 𝑛
; 𝑙
; 𝑖
1,2,3,⋯ ,𝑙; [] is the rounding symbol; N is the
sequence length. After each mean generating
function is obtained, an L-order mean generating
matrix can be constructed. When constructing the
L-order mean generating matrix, each element
requires at least two original time series values to
calculate the mean value, 𝐿𝑙
. The
constructed mean generation function is periodically
extended according to the following formula:
1
()
ll
t
ft X t l Int
l
(𝑙1,2,⋯,𝐿;𝑡
1,2,⋯,𝑁 (3)
By extending each mean generating function in
equation (3), the extension matrix in the form of the
following formula can be obtained:
11111 1
22 22 2 22
(1) (1) (1) (1) (1) (1)
(1) (2) (1) (2) (1) (i )
(1)(2) (L)(1) (i)
LL L L LL
XXXXX X
XX XX X X
F
XX X X X
In matrix 𝑋
𝑖
means taking 𝑋
1 ,
𝑋
2 , …, 𝑋
𝐿 in sequence. Put 𝑓
𝑡 is
regarded as L basis function as the predictor of the
original time series. Finally, a model is established
for prediction.
3.3 Grey Dynamic Model
The gray dynamic model is based on the gray theory
system. The model does not focus on the
mathematical statistics of the time series, but
converts the chaotic time series into a time series
with a certain law, and then builds the model (Zheng
& Shi, 2010).
The basic idea of gray dynamic model
establishment is to transform the sequence in a
differential equation, and then establish a dynamic
model of its change, expressed as Grey dynamic
model, generally denoted as the GM model
(Xia &
Ye, 1995; Xu et al., 2005), the established the
𝐺𝑀ℎ,𝑛 model is differential the time continuous
function of the equation:
Research on Annual Runoff Forecast of Shaanxi Section of Hanjiang River Based on Multi-model
379

(1) 1 (1)
(1) (1) (1) (1)
11
112231
1
() ()
(1)
nn
nnn
nn
dX d X
aaXbXbXbX
dt dt
(4)
where H is the order of the above differential
equation; N is the number of variables.
The coefficient vector a of the above equation is
expressed in matrix form as follows: 𝑎
𝑎
,𝑎
,⋯,𝑎
⋮𝑏
,𝑏
,⋯,𝑏
;The coefficient
vector a can be solved by the least square
method: 𝑎
𝐴⋮𝐵
𝐴⋮𝐵
𝐴 ⋮ 𝐵
𝑌
,(𝑌
𝑋
2𝑋
3⋯𝑋
𝑛
).
For 𝐺𝑀ℎ,𝑛 model, the larger the order h of
differential equation, the more complex the model
calculation is, but the prediction effect is not
necessarily the better, so h is generally less than
order 3. For single sequence, the Grey dynamic
prediction model 𝐺𝑀1,𝑛 is generally a
commonly used state analysis model, which is called
the first-order dynamic Grey model of n sequences
(Zeng & Lin, 2010).
In the 𝐺𝑀1,𝑛 model, the original data are
expressed as follows:
(0) (0) (0) (0)
111 1
(1), (2), , (m)Xxx x (5)
The rest of the factor sequences are expressed in
the same form. Then, the original sequence, that is,
the prediction object sequence and each factor
sequence are accumulated once to obtain the
corresponding 1-AGO sequence. Then establish the
differential equation of the following formula:
(1)
(1) (1) (1) (1)
1
11223 1nN
dX
aX b X b X b X
dt
(6)
Where 𝑎 is called development coefficient;
𝑏
𝑏
,⋯,𝑏
are called driving coefficients;
𝑏
𝑋
𝑖2,3,⋯,𝑁
is called the driver; The
corresponding time function of the model is obtained
by solving the differential equation as follows:
(1) (0) (1) (1)
11
11
22
(1) (1) (1) (1)
nn
at
ii
ii
ii
bb
Xt X Xt e Xt
aa
(7)
Where 𝑡1,2,⋯,𝑚; The cumulative sequence
value of the original sequence is calculated by the
above formula, which needs to be restored to obtain
the predicted value. The restoration formula is as
follows:
(0) (1) (1)
11 1
() ( 1) ()
X
tXt Xt
(1,2,,)tm
(8)
The above formula is the prediction model of
Grey dynamic prediction model 𝐺𝑀1,𝑛.
3.4 DenseNet Model
The DenseNet model is also called dense
convolutional neural network, which is a neural
network model developed in recent years. The whole
structure of the DenseNet model includes dense
blocks and transition layers, while the hidden layers
are located in dense blocks. Dense blocks are
connected through convolution layer and pooling
layer. The convolution layer extracts the features of
input information of the upper layer, and the pooling
layer performs dimensionality reduction processing.
The input of a certain layer in the model is the output
of all previous layers, forming L(L+1)/2 connections
(Schreider et al., 1997).
The DenseNet model uses a single-step
prediction model. The principle assumes that there is
a time series 𝑋𝑥
,𝑥
,𝑥
,⋯,𝑥
. First, input n
historical data before time t in the input layer, and
the predicted value of time t is obtained in the output
layer. When the model is calculated, the eigenvector
is first input at the input level, and convolution and
pooling operations are carried out at the transition
level. The obtained eigenvalue is transferred to the
next level until the output value is obtained. In the
convolution layer, the commonly used activation
functions are as follows:
(1) Logarithmic S-shaped Sigmoid function:
𝑓
𝑥
(9)
(2) Tanh function:
𝑓
𝑥
(10)
(3) Relu linear correction unit:
𝑓
𝑥
max
𝑥,0
(11)
WRE 2021 - The International Conference on Water Resource and Environment
380
4 EXAMPLE APPLICATION
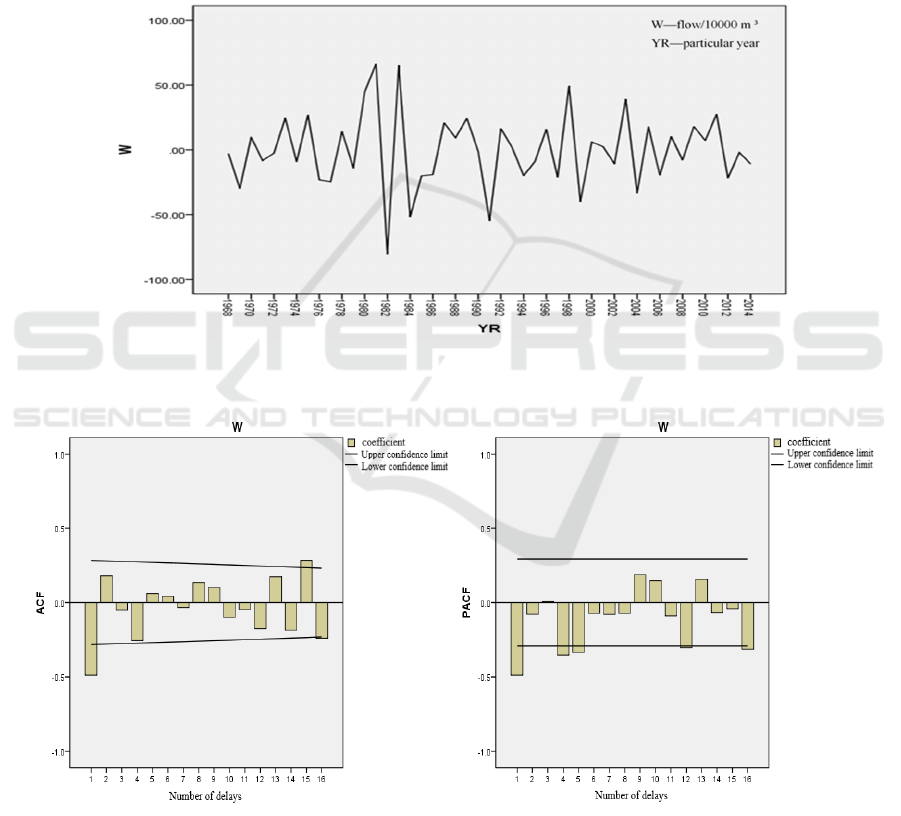
4.1 ARIMA Model Prediction
The annual runoff sequence of Yangxian Station in
the section of Han River in Shaanxi was selected for
ARIMA model prediction. Firstly, the stationarity
and pure randomness of the annual runoff sequence
of the Yangxian Station were analyzed by drawing
the time series diagram and autocorrelation diagram
of the annual runoff sequence. After judgment, the
station runoff time sequence is a non-stationary
sequence and a non-white noise sequence. Therefore,
it is necessary to carry out differential treatment to
the annual runoff series. In order to avoid the
phenomenon of over-differential, the annual runoff
sequence of Yangxian station is processed by
first-order difference (Figure 2), and the time series
graph after the difference and the autocorrelation
graph and partial autocorrelation graph are drawn, as
shown in Figure 3.
Figure 2: First order differential time sequence diagram of annual runoff sequence.
(a) Autocorrelation diagram (b) Partial autocorrelation diagram
Figure 3: First order differential autocorrelation and partial autocorrelation of runoff series.
It can be seen from (a) and (b) in Figure 3 that
the sequence has basically been a zero mean
stationary sequence after the first-order difference,
and the autocorrelation diagram is basically within
Research on Annual Runoff Forecast of Shaanxi Section of Hanjiang River Based on Multi-model
381
the confidence interval after the first-order lag time.
It can be judged that the autocorrelation function is a
first-order tail, and the partial autocorrelation
diagram decays rapidly to zero from the lag time of 2,
which can be preliminarily judged as truncated. In
order to ensure the accuracy of prediction, partial
autocorrelation is used as truncation and tailing, and
the model is established to select the optimal model.
Four models are determined through parameter trial
calculation: ARIMA (5,1,1), ARIMA (6,1,1),
ARIMA (5,1,0) and ARIMA (6,1,0). The four
models are tested and optimized. The statistics of
each model are shown in Table 1.
Table 1: Model parameter comparison.
Model
LB Statistics
BIC Value
Sequence Value DF Sig.b
ARIMA (5,1,1) 23.065 12 0.322 7.017
ARIMA (6,1,1) 22.120 11 0.169 7.103
ARIMA (5,1,0) 23.321 13 0.310 6.923
ARIMA (6,1,0) 23.809 12 0.242 7.022
It can be seen from Table 1 that the Q statistic P
value (Sig.b) of the residual sequences of the four
models are all greater than 0.05, indicating that the
residual sequences of the four models are all white
noise sequences. All four models are effective in
extracting the original sequence information
sufficiently. The optimal model is selected by the
BIC criterion. The smaller the BIC value, the better
the model. Therefore, the ARIMA (5,1,0) model with
the smallest BIC value is selected as the final model.
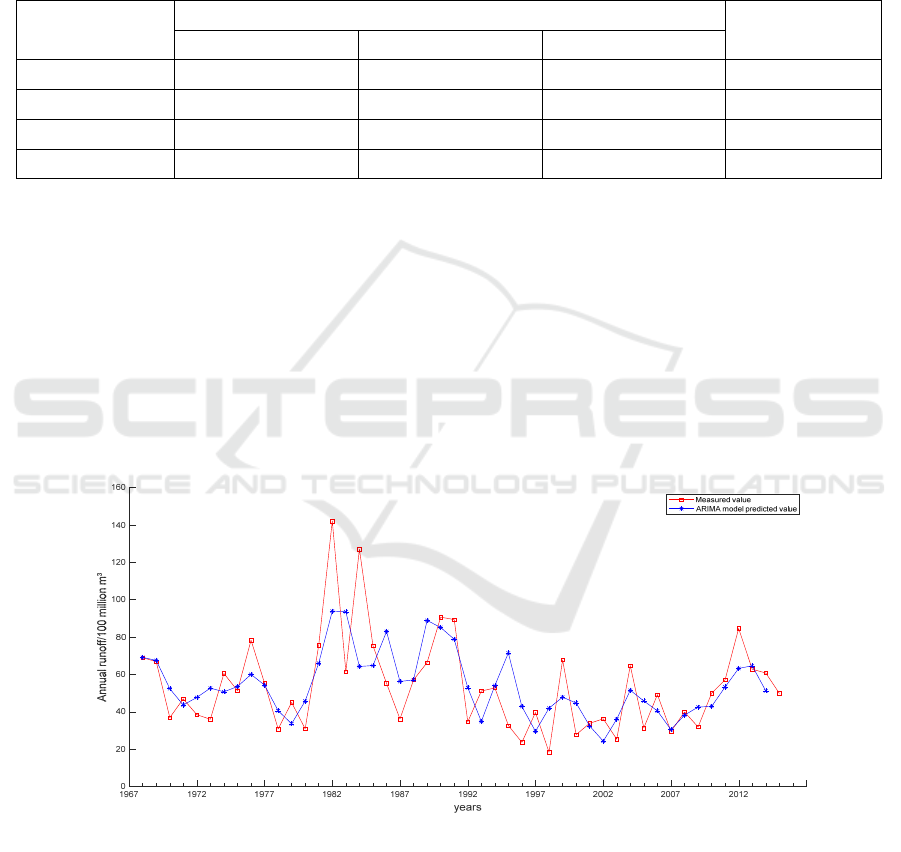
The model is used to predict the annual runoff
sequence of Yangxian Station, and the fitting curve
between the predicted value and the measured value
is shown in Figure 4. It can be seen that the predicted
value of ARIMA model does not fit well with the
measured value. Although the predicted sequence
can basically fit the trend of the measured sequence,
when the measured sequence rises and falls sharply,
the predicted sequence does not have the same
change law, and the predicted value also differs
greatly from the measured value, so the prediction
effect of ARIMA is poor.
Figure 4: Fitting diagram of the ARIMA Model forecasted and measured values.
4.2 Prediction of Mean-generating
Function
According to the basic principle of the mean
generating function model and formula (2), the mean
generating function is constructed based on the
annual runoff time series data of Yangxian station,
and the L-order mean generating matrix is obtained.
Then carry out periodic epitaxy according to formula
(3), and finally obtain the epitaxy matrix as follows:
WRE 2021 - The International Conference on Water Resource and Environment
382
53.67 53.67 53.67 53.67 53.67 53.67
56.62 50.73 56.62 50.73 56.62 50.73
52.06 58.93 69.56 52.06 69.56
F
(12)
Thus, 24 predictors of the original annual runoff
series are obtained, conduct cross-correlation
analysis between each prediction factor and annual
runoff series, select the factors with good correlation
with the original series for multiple linear regression,
or consider all prediction factors for stepwise
regression. When modeling the mean generation
function, this paper considers the multiple regression
model, treats the selected factors equally, does not
distinguish the importance of each factor, and
ignores the independence of each factor. Therefore,
the model is established by stepwise regression of all
predictors, and then the 8 predictors most closely
related to the original sequence are selected
according to correlation analysis, and then the final
model is established by stepwise regression method
for prediction. First calculate the AIC value and BIC
value of the model, and the serial numbers of
predictors selected through correlation analysis are
15, 17, 18, 20, 21, 22, 23 and 24 respectively.
The final model is established by stepwise
regression method for prediction, and the parameters
and test statistics of the model are shown in Table 2.
It can be seen that only factor 22, factor 23, factor 17
and factor 15 are left after stepwise regression; The p
value (SIG) in F test is less than 0.05, indicating that
the overall linear regression of the model is
significant; The p value (SIG) in the t-test is also less
than 0.05, indicating that the regression coefficient
of the model passes the significance test, that is, the
remaining four factors (factors 22, 23, 17 and 15)
have a significant relationship with the annual runoff
series, and the model is effective. Therefore, the final
model is:
𝑦 25.773 0.481𝑥
0.349𝑥
0.319𝑥
0.323𝑥
(13)
Table 2: MGF model correlation coefficient and test statistics.
Forecasting factors regression coefficient
F test t test
F Sig t Sig
constant
𝑏
-25.773
25.425 0
-2.989 0.005
Factor 22
𝑏
0.481 3.199 0.003
Factor 23
𝑏
0.349 2.134 0.039
Factor 17
𝑏
0.319 2.560 0.014
Factor 15
𝑏
0.323 2.047 0.047
The model is used to predict the annual runoff
series of Yangxian station, and the fitting curve
between the predicted value and the measured value
is obtained, as shown in Figure 5. It can be seen that
the prediction effect of the mean generation function
model is significantly better than the ARIMA model.
The prediction sequence of the mean generation
function model has the same change law as the
measured sequence. From 1967 to 1992, the
difference between the predicted value of the model
and the measured value is small, and the predicted
sequence and the measured sequence have a good
fitting effect, while from 1992 to 2007, the
difference between the predicted value and the
measured value becomes larger. The fitting degree
between the predicted sequence and the measured
sequence is general. Generally speaking, the
prediction effect of mean generation function model
is general.
Research on Annual Runoff Forecast of Shaanxi Section of Hanjiang River Based on Multi-model
383
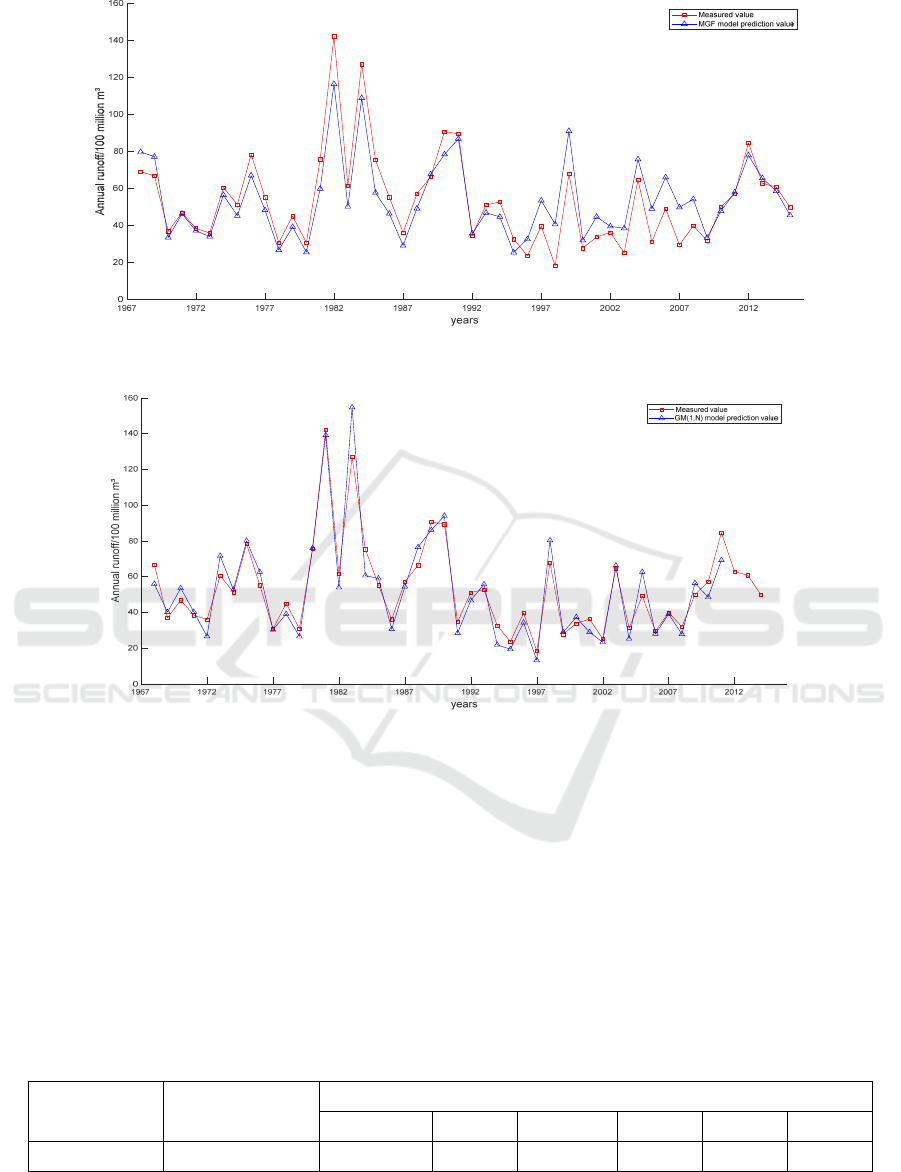
Figure 5: Fitting diagram of MGF model forecast and measured values.
Figure 6: Fitting diagram of predicted values and measured values of GM (1, N) model.
4.3 Gray Dynamic Model Prediction
In this study, the annual runoff time series of
Yangxian station from 1967 to 2011 is taken as the
original data, that is, the prediction object. The
monthly average flow of this series from May to
October each year is taken as six prediction factor
series, and the GM (1, n) Grey dynamic prediction
model is established. Based on the established model,
the annual runoff of each year is predicted and tested
with the annual runoff from 2012 to 2014.
According to the basic principle of the model, the
1 - AGO series of each series can be calculated based
on the six series data of the monthly average flow.
These data are from May to October of the annual
runoff series of Yangxian Station. The calculation
results is the accumulation series, and then the
accumulation matrix B is obtained.The coefficient
vector a is obtained by using the least square method.
The parameters of the 𝐺𝑀 1,𝑁 model is
calculated as shown in Table 3.
Table 3: Annual runoff GM (1, N) model parameter calibration results.
Name of
parameter
Development
coefficient 𝑎
Driving coefficient
𝑏
𝑏
𝑏
𝑏
𝑏
𝑏
Constant Value 1.408426 0.004813 0.000698 0.000590 0.001919 0.000517 0.002650
In the above table, 𝑎 is the development
coefficient and the six driving coefficients are the
Grey action quantity of the model. Bring the model
parameters into formula (7) to obtain the time
WRE 2021 - The International Conference on Water Resource and Environment
384
response function of Grey dynamic model
𝐺𝑀 1,𝑛, and then restore according to formula (8)
to obtain the predicted value of annual runoff series
of Yangxian station. The fitting curve between the
predicted value and the measured value of the Grey
dynamic prediction model is shown in Figure 6. It
can be seen that the Grey dynamic model has a good
prediction effect on the annual runoff prediction of
Yangxian station. The prediction sequence has the
same change law as the measured sequence. The
predicted value of the model is close to the measured
value, and the predicted sequence has a good fit with
the measured sequence
4.4 DenseNet Model Building
This paper starts from the traffic data of Yangxian
Station on January 21, 1967, predicts the average
daily traffic of the previous nine days, takes the daily
traffic data of Yangxian Station on January 21, 1967
solstice on May 29, 2005 as the training data to train
the model, and the remaining data from 2006 to 2014
as the verification data. In order to train the model
effectively to improve the prediction accuracy and
make the model have better performance and
convergence speed, it is necessary to transform the
basic data in advance. The transformation formula is:
𝑧𝑎log
𝑥
𝑏 (where Z is the value after
transformation; 𝑎 is an arbitrary constant; 𝑥
is the
measured value, and b is generally 1). Then, the
predicted sequence obtained from the transformed
sequence is reduced according to the formula: 𝑥
10
/
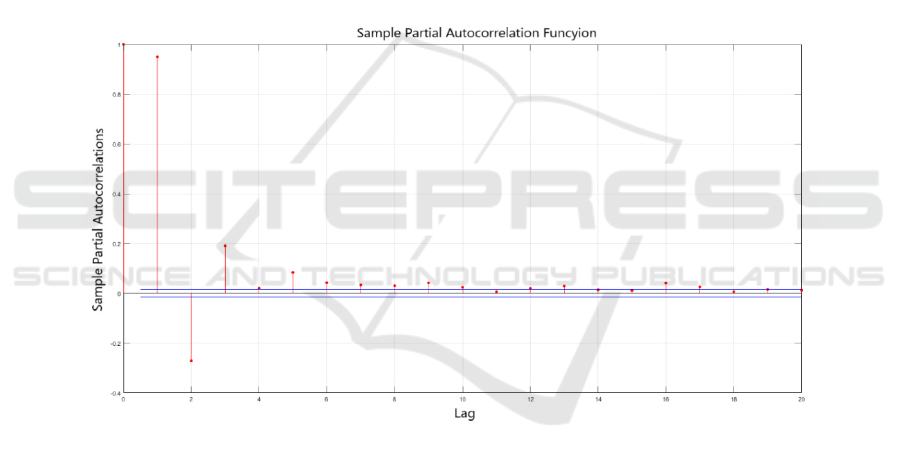
𝑏. In order to determine the model structure,
the partial autocorrelation diagram of the original
time series is also required, as shown in Figure 7.
Figure 7: Partial correlation diagram of original sequence.
As can be seen from Figure 7, the lag time is set
to 20, and after the lag time is 9, the partial
correlation coefficient basically remains stable and
oscillates in the upper and lower interval. Therefore,
the input layer of the model is set as nine neurons in
this paper. Through the trial algorithm, the number
of hidden layers is determined as three layers, and
each layer contains 30 neurons. The output layer is
set to the day forecast. Thus, the DenseNet model
structure was finally determined as 9-30-30-30-1.
After determining the model, first all the original
daily flow data are transformed, and then the training
set data are input into the model for training. Then,
the data of the validation set are used for verification,
and the prediction results of the training set and the
validation set are obtained. The predicted daily
average flow is restored, and the predicted annual
runoff of each year is finally accumulated and
calculated. The fitting curve between the predicted
value and the actual value of the DenseNet model is
shown in Figure 8. It can be seen that DenseNet
model has a good prediction effect on the annual
runoff prediction of Yangxian station. The prediction
sequence has the same change law of steep rise and
fall as the measured sequence. The difference
between the predicted value of the model and the
measured value is very small, and the predicted
sequence has a good fit with the measured sequence.
Research on Annual Runoff Forecast of Shaanxi Section of Hanjiang River Based on Multi-model
385
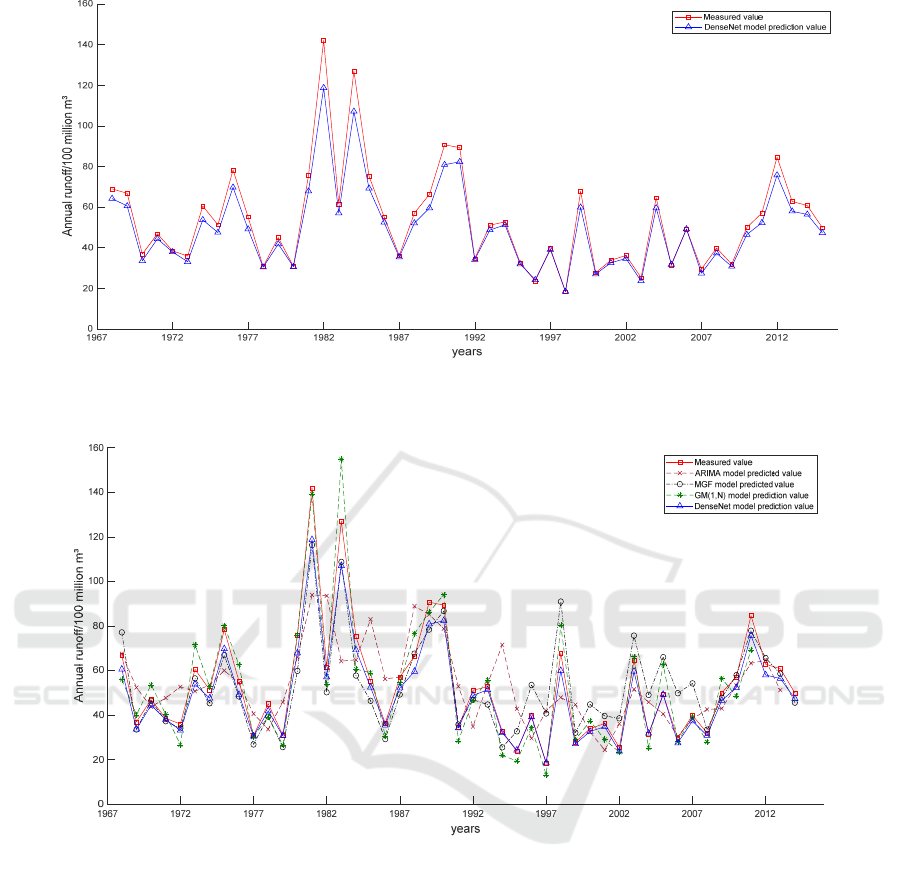
Figure 8: Fitting diagram of the predicted value of the DensetNet model and the measured.
Figure 9: Fitting Diagram of Predicted Values and Measured Values of Multiple Models.
5 COMPARATIVE ANALYSIS OF
MULTI-MODEL PREDICTION
RESULTS
The model is used to predict the annual runoff series.
The reliability of the model prediction result needs to
be tested after obtaining the prediction sequence
value. According to the Hydrological Prediction
specification, it is considered that the relative error of
one prediction is within plus or minus 20%, and the
qualified rate of prediction is calculated (Ministry of
Water Resources of the People's Republic of China,
2000), The average relative error MAPE, root mean
square error RMSE and certainty coefficient DC are
used to analyze the coincidence degree between the
predicted sequence and the measured sequence (Sun,
2012; Huang, 2015). The DC coefficient represents
the degree of coincidence between the predicted
sequence and the measured sequence. It and the
predicted qualified rate are maximized indicators, and
the greater its value, the better. MAPE and RMSE are
minimization type indicators. The smaller the value,
the better. The calculation results of the above four
indicators are shown in Table 4. The fitting diagram
between the predicted value of each model and the
measured value of annual runoff of Yangxian station
is shown in Figure 9.
WRE 2021 - The International Conference on Water Resource and Environment
386
Table 4: Multi-model annual runoff forecast accuracy evaluation.
Model Qualification rate (%) MAPE (%) RMSE DC
ARIMA model 51.1 33.89 22.06 0.203
MGF model 72.9 19.47 13.40 0.801
Grey dynamic model 86.4 12.40 8.09 0.893
DenseNet model 100 6.39 6.18 0.937
According to the order of ARIMA model, MGF
model, 𝐺𝑀 1,𝑛 model and DenseNet model, it
can be seen from table 4 and Figure 9 that the
predicted qualified rate and DC coefficient are
getting larger and larger, the values of MAPE and
RMSE are getting smaller and smaller, and the
fitting degree between the predicted value series and
the measured value series is getting better and better.
Therefore, among the four models, ARIMA model
has the worst prediction effect. However, it can
basically show the trend of runoff series with large
error. The prediction effect of mean MGF model is
general. The prediction effect of Grey Dynamic
prediction model is better, and the prediction effect
of DenseNet model is the best. The prediction
qualified rate and DC coefficient of the prediction
results of DenseNet model are the largest, and
MAPE and RMSE are the smallest, showing obvious
advantages in all aspects. Therefore, for the annual
runoff prediction of Shaanxi section of Hanjiang
River, DenseNet model is the most suitable for the
annual runoff prediction of this area.
6 CONCLUSION
In this study, ARIMA, MGF model, Grey dynamic
prediction model and DenseNet model are used to
predict the annual runoff of Shaanxi section of
Hanjiang River. Through analysis and comparison,
the runoff prediction model most suitable for
Shaanxi section of Hanjiang River among the four
models is selected, which can improve the accuracy
of prediction results.
(1) Comprehensive comparative analysis of the
prediction results of the four models shows that
compared with ARIMA model, MGF model and
Grey Dynamic model, DenseNet model has the
highest prediction qualification rate, up to 100%, the
average relative error and root mean square are the
smallest, and the fitting effect is the best. It is most
suitable for the research of runoff prediction in
Shaanxi section of Hanjiang River.
(2) DenseNet model is the most suitable runoff
prediction model for the Shaanxi section of Hanjiang
River in this study. It is a runoff prediction model
based on neural network theory. In recent years,
some new theories have emerged in the field of
neural networks, such as Meshk (Huang, 2015)
theory. Densenet model can be used as a simple
template for creating neural network runoff
prediction model, and provide a reference for future
research.
(3) Appropriate runoff prediction models for
different regions can improve the accuracy and
rationality of runoff prediction, and provide
scientific and reasonable runoff prediction for
solving water problems such as water shortage,
water pollution, frequent flood disasters and urban
waterlogging. At the same time, it can also provide
basis for water conservancy departments to carry out
water regulation and rational allocation of water
resources, and provide guidance for reservoir
operation management and prevention Put forward
guidance on flood and drought relief, water
conservancy and power generation, agricultural
irrigation, etc.
ACKNOWLEDGMENTS
This research was funded by the Natural Science
Basic Research Program of Shaanxi Province (Grant
No. 2017JQ5076, 2019JLZ-16), Science and
Technology Program of Shaanxi Province (Grant
No.2019slkj-13, 2020slkj-16), the Scientific
Research Plan Program of Educational Department
Shaanxi Province (Grant No.17JK0558) and the
Program of Introducing Talents to Universities
(Grant Nos. 104-451016005 and 2016ZZKT-21).
The authors thank the editor for their comments and
suggestions.
REFERENCES
Cui, J. S., & Ye, L. (2009). Prediction analysis of annual
runoff of Harbin station based on stepwise regression
mean generation function model. Heilongjiang
Hydraulic Science and Technology, 37(04), 7-9.
Research on Annual Runoff Forecast of Shaanxi Section of Hanjiang River Based on Multi-model
387

Deng, J. L. (1982a). Control problems of grey systems.
Systems & Control Letters, 1(5), 288-294.
Deng, J. L. (1982b). The Grey Control System. Journal of
Huazhong University of Science and Technology
(Natural Science Edition), 3, 9-18.
Du, Y., & Ma, R. Y. (2018). Application of Different
Improved ARIMA Models in the Prediction of
Hydrological Time Series. Water Power, 44(04),
12-14,28.
Dutta, D., Welsh, W. D., & Vaze, J. (2012). A
Comparative Evaluation of Short-Term Streamflow
Forecasting Using Time Series Analysis and
Rainfall-Runoff Models in Water Source. Water
Resources Management, 26(15), 4397-4415.
Gu, H. Y. (2008). Study on the Forecasting of River
Runoff. Northeast Forestry University.
Huang, Q. L. (2015). Study on runoff prediction model of
Jinghe River Basin. Northwest A&F University.
Hsu, K. L., Gupta, H. V., & Sorooshian, S. (1995).
Artifical Neural Network Modeling of the
Rainfall-Runoff Process. Water Resources Research,
31(31), 2517-2530.
Labat, D., Godderis, Y., & Probst, J. L. (2004). Evidence
for global runoff increase related to climate warming.
Advances in Water Resources, 27(6), 631-642.
Lei, S. P., Ruan, B. Q., & Xie, J. C. (2003). Function of
Water Resource on Human Civilization Innovation
Mechanism. Journal of Northwest A&F University
(Social Science Edition), 3(6), 61-65.
Li, J., Wang, L., & Ma, G. W. (2008). Application of Least
Squares Support Vector Machines in Runoff Forecast.
China Rural Water and Hydropower, 5, 8-10.
Liang, H., Huang, S. Z., Meng, E. H., & Huang, Q. (2020).
Runoff prediction based on multiple hybrid models.
Journal of Hydraulic Engineering, 51(01), 112-125.
Liu, D. L. (2011). Study on ARIMA model prediction of
annual precipitation and soil and water conservation
in Zhengzhou. Research of Soil and Water
Conservation, 18(6), 249-251.
Liu, S. F., & Yang, Y. J. (2015). Advance in Grey System
Research (2004-2014). Journal of Nanjing University
of Aeronautics & Astronautics, 47(1), 1-18.
Liu, X. A., Wang, J. W., & Wang, H. W. (2006). Wavelet
Analysis-based ARIMA Method for Monthly Runoff.
Forecast Hydroprower and Pumped Storage, 4(04),
77-80.
Ministry of Water Resources of the People's Republic of
China. (2000). SL 250-2000 code for hydrological
information forecast. Beijing: China water resources
and Hydropower Press.
Schreider, S. Y., Jakeman, A. J., & Dyer, B. G. (1997). A
combined deterministic and self-adaptive
stochasticalgorithm for streamflow forecasting with
application to catchments of the Upper Murray Basin,
Australia. Environmental Modelling & Software,
12(1), 93-104.
Sun, H. Z. (2012). A Variety of Combination Forecasting
Method and Comparing of Medium and Long-term
Stream-flow. Northwest A&F University.
Sun, M., Kong, X. C., & Geng, W. H. (2013). Time series
analysis of monthly precipitation in Shandong
Province Based on ARIMA model. Journal of
Ludong University (Natural Science Edition), 29(3),
244-249.
Wei, F. Y., & Cao, H. X. (1990). The mathematical model
of long - term forecasting and its application. Beijing:
China Meteorological Press.
Xia, J., & Ye, S. Z. (1995). Grey System Approach
Applied to Flood and Runoff Forecasting. Water
Resources and Power, 3, 197-205.
Xiong, B. X., & Chen, F. (1987). Hydrological
Characteristics of the Upper Hanjiang River in
Shaanxi Province. Power System and Clean Energy,
1, 9-16.
Xu, J. X., Li, Z. Q., & Zhang, F. (2005). Application and
Research of Grey System Theory in Surface Runoff
Forecast. Journal of North China University of Water
Resources and Electric Power (Natural Science
Edition), 26(3), 1-3.
Zeng, W. B., & Lin, L. J. (2010). Prediction of Monthly
Runoff in the Upper Reaches of Qingyi River Based
on GM (1,1) Model Shaanxi. Journal of Agricultural
Sciences, 56(05), 92-94.
Zheng, S. W., & Shi, B. (2010). Study on annual runoff
prediction based on improved grey system theory.
Yellow River, 32(02), 40-41.
WRE 2021 - The International Conference on Water Resource and Environment
388
