
Unmanned Aerial Vehicle Attack Detection using Snort
Shahzad Mujeeb
1
, Sunil Kumar Chowdhary
1
, Abhishek Srivastava
1
, Rana Majumdar
1
and Manoj Kumar
2
1
Amity University Uttar Pradesh, Noida, India
2
School of Computer Science, University of Petroleum and Energy Studies, Dehradun, India
wss.manojkumar@gmail.com
Keywords: Unmanned, Attack, Snort, Detection, Aerial, UAVs.
Abstract: In recent times, security issues relating to unmanned aerial vehicles (UAVs) and drones have anticipated a
staid attention from research communities in various domains in the form of networking, communication,
and civilian as well as in defence zone. It has its widespread functionality in the area of agriculture,
commerce, and transportation, the use of unmanned aerial vehicles (UAVs)/ drones, is increasing. The
ground control systems (GCS) are used to remotely monitor UAVs over the network. Since UAVs are
vulnerable to security risk, they become the targets of various attacks such as GPS spoofing, jamming
attack, network attacks and many other forms so to tackle with such issues the prime concern will be to
identify these attacks followed by to prevent the UAVs or drones from UAV attacks. On contrary network-
controlled UAVs however are equally vulnerable to threats like DOS attacks, GPS spoofing etc. In this
work a network surveillance approach is projected for UAV attack detection system by means of Snort.
Snort uses a set of guidelines and rules set by the user itself to help in identifying the malicious network
behaviour and to locate packets that fit them and create user warnings with those rules. It is an open-source
tool that records traffic analysis and packets in real time.
1 INTRODUCTION
An unmanned aerial vehicle UAVs commonly
known as drones has become the most imperative
device in today’s technology era which exhibits its
presence in various areas such as disaster
monitoring, boarder surveillance, and relay
communication. An automatic aircraft on board
basically targets for reducing the deployment
complexity, with low maintenance and acquirement
cost. It aims to work with in conjunction with
minimum user interaction in collaboration with
UAV communication system ensuring robustness.
The vehicular applications are used for connecting
various multiple smart aerials over networks in order
to meet the time critical missions. The only
limitation to these unmanned aerial vehicles is they
have limited data payload and energy. A remote-
control mechanism is used to control the flights plan
using software. Navigation refers to the process of
accurately determining position, plans and path
based on the given path.
Hence, drone navigation is the new research
capacities that emphasis on developing system
which help in measuring path plan and the position
of various drones. It is the key to develop the next
generation autonomous drones. These UAVs are
functional almost ubiquitously in surveillance,
transportation, monitoring, agriculture, farming,
forestry, and environment protection. UAVs play an
important and crucial role in military services where
the UAVs are used for carrying small missiles and
other weapons. These UAVs carry weapons; various
missiles are being dropped at the intended positions
controlled remotely from ground base stations and
control stations. A large number of farmers may use
these drones to check their fields, farms and crops as
well in order to check irrigation systems, these
UAVs can also be used in determining the areas of
crops are impaired, damaged, broken so to make
proper treatment accordingly. Retailers like
Amazon, Flip-kart are using these drones to deliver
various products. These UAVs are also used in film
industries to take the beautiful cinematic shots
nowadays; it is easily available for everyone to
18
Mujeeb, S., Chowdhary, S., Srivastava, A., Majumdar, R. and Kumar, M.
Unmanned Aerial Vehicle Attack Detection using Snort.
DOI: 10.5220/0010789700003167
In Proceedings of the 1st International Conference on Innovation in Computer and Information Science (ICICIS 2021), pages 18-24
ISBN: 978-989-758-577-7
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

purchase and access at low prices to boot. Due to
high mobility and flexibility more and more UAVs
are being employed in civil applications, although it
suffers from potential risk. Various threats that are
associated with drones are the source of some risks;
it may get collide with buildings, aircrafts or other
objects, even it may get involved with potential
terrorist acts as well.
Researchers show their concerns and choose this
area as their research and presented their thoughts in
various forms. Yuliya Averyanova, Lyudmila
Blahaja in their works focuses on identifying UAV
risks and vulnerabilities in order to better implement
the risk-oriented approach of integrated UAVs into
the airspace safely and improving the security of
unmanned aerial systems. Nature, economic
engineering, and vulnerabilities and threats specific
to humans are quickly taken into account and certain
potential approaches to reduce vulnerabilities and
threats are also addressed in the paper.
Menaka Pushpa Arthur talks about various
possible cyber and physical risks that could emerge
from the use of UAVs, and then investigate multiple
methods of identifying, monitoring, and interdicting
hostile drones by utilizing techniques that focus on
UAV-emitted ambient radio frequency signals,
radars, acoustic sensors, and UAV-detection
computer vision techniques. Yuliya Averyanova,
Lyudmila Blahaja showed their concers about
durability of such vehicles. H. Shakhatreh, A.H.
Sawalmeh, A.I. Al-Fuqaha, Z. Dou, E.K. Almaita,
I.M. Khalil emphasis on key research challenges in
this area that need to be addressed properly. A.A.
Zhilenkov, I.R. Epifantsev talks about trajectories
planning in navigation system. H. Sedjelmaci, S. M.
Senouci and N. Ansari depicted that UAVs or drones
have been vulnerable to multiple malware attacks
such as the jamming attack since FANET.
The paper proposes a security framework for
FANET for Federated Learning-based on-device
jamming attack detection. It concludes that GPS
Jamming and Spoofing concentrate on UAV-related
research to address cybersecurity risks but avoids
assaults on the stream of controls and data
communications. L. Xiao, C. Xie, M. Min and W.
Zhuang [8] discussed the practicality of using
Identity Based Encryption in the UAV resource
restriction network. A major architecture challenge
when encryption is applied is the space limitation
existence of such WiFi-based UAV networks as
elaborated by Park, K. J., Kim, J., Lim, H., & Eun,
Y. It also discusses the practicality and performance
of IBE Identity Based Encryption in the UAV
network and thus provides an important wireless
UAV network resource limited security system.
From literature review it has been observed that
most of the failures are due to:
• Technical breakdown.
• Human factor.
• Adverse weather.
• Other factors.
However, in some intricate surroundings, UAV
cannot sense the environment parameters due to
limited communication and traditional sensor
perception capabilities. Despite many efforts to
overcome these weaknesses, it is essential to
develop more efficient and effective method in order
to perform more stability, predictability, and
security. Therefore, high performance independent
navigation is of great importance to develop the
application of UAV is of great importance. The
control of each drone falls on pilot to use visual
tracking to determine position and orientation. More
advanced drones use global positioning system
(GPS) receivers to play a significant role, that is,
navigation and control loop. Some smart features
include drone memorization to track the position
track. The trajectory of the drone can be
predetermined to establish GPS waypoints. When
this function is executed, the drone will use autopilot
to follow this path.
There exist various forms of UAV attacks; the
initial stages of UAV attack start with affecting the
physical configuration and the loss of mobility
which is also known as manoeuvrability. It is very
much difficult to detect, and to prevent or
countermeasure which includes the proper capturing
of vulnerabilities. On the basis of certain factors,
UAV attack can be categorized into four major parts
which are named as, UAV freezing, waypoint
alterations, enforced collision, and UAV hijacking.
These various attacks are as follows:
• UAV freezing: This attack starts with the
failure of node which is caused due to
modification in physical configuration of
unmanned armed vehicles which leads to loss
in mobility of UAV. These mobility losses
result in network failures. Intrusion, signal
jamming, and session hijacking are the main
cause to this attack.
• Waypoint alterations: Another major threat to
fully functional UAVs is waypoint
modifications. This attack leads to
overlapping of mobility patterns which in
turn results in enforced collision. This is a
Unmanned Aerial Vehicle Attack Detection using Snort
19
very fatal attack, also very difficult to detect,
identify and trace their effect.
• Enforced clustering: This attack is opposite to
waypoint alterations, in this attack UAV
adjust itself forming sub-clusters, and also
create the own sub-network that works and
operates opposite to the existing networks. It
can be used in getting various significant
details regarding configurations and patterns
of existing UAVs.
• UAV hijacking: This attack is capturing of
UAVs from remote location using connective
technology. Since UAVs are controlled
remotely from ground base station or control
stations so it becomes easy for the attacker to
hack in between and make the UAV work as
per their requirements and intentions. UAVs
operate initially under the control of the third
party to override the instructions if required.
The attacks are created based on the identified
vulnerabilities found in a system, in this case UAV
vulnerabilities which result in various number of
attacks such as attack to physical configuration,
waypoint alteration, UAV high-jacking, UAV
network attack such as DOS attack, GPS Spoofing
and so on. These attacks can affect a single node or a
single link between two nodes or it can also affect
the whole networks which could lead to huge loss.
These attacks can split up into three phases
which are named as, identification phase, creating
vulnerabilities/ session break, and attack phase. The
details of each phase are as follows:
• Identification phase: It is the first and the
initialisation phase starting with the network
to operate the entire network to fetch the data
in network using certain existing approaches
like session hijacking and so on.
• Session’s break/creating vulnerabilities:
Since all the networks are prone to network
attacks to acquire a session to launch any one
of the defined attacks. In this second phase, a
new set of codes can be used to launch cyber-
attack.
• Attack Phase: This is the final phase after the
attack is launched; the cyber-attack starts
with compromising the whole network to
revoke the session. The main objective of a
network controller is to prevent a network
from undergoing the state of cyber-attack
during network mission because once it is
initialised it becomes very difficult to detect
and prevent it.
The term vulnerability refers to the unreliability and
insecurity; but in the context of UAVs
vulnerabilities can be defined as the weakness in a
system that could lead to the misuse of that system
or loss such as system damage. In order to
comprehend and systemize these, which can be
revealed while UAV operation phase, a basic
general taxonomy was developed. It allows in
tracking certain possible vulnerabilities in UAV life
cycle though its stages, as well define their purposes,
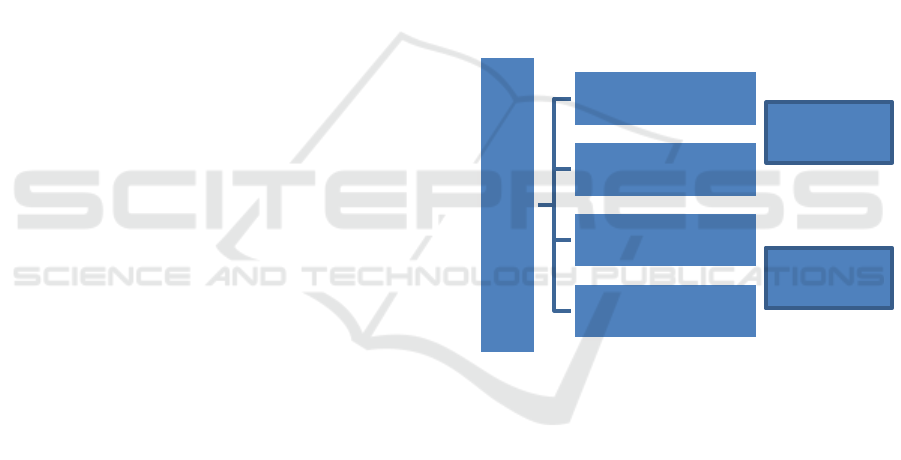
ways and subjects and so on. As it is shown in figure
below, these vulnerabilities can occur at four stages
of UAV life cycle: development and design phase,
manufacturing phase, operation phase and
maintenance phase. These vulnerabilities that can
occur at each stage of its lifecycle can further be
divided into incidental or intentionally which is
created for occasional or specific purpose.
Figure 1: Classification of Vulnerabilities Depending on
the Phase of UAV Lifecycle
2 METHODOLOGY
Snort is the world's leading Open-Source packet
analysis software. It was created in 1998 by Martin
Roesch, founder and former CTO of Sourcefire.
Snort is now developed by Cisco, which purchased
Sourcefire in 2013. Snort uses a set of guidelines to
help identify malicious network behaviour and to
locate packets that fit them and create user warnings
with those rules. It is used for performing real time
traffic analysis. A victim machine can use Ubuntu or
Windows operating system in which snort is
configured and using kali Linux an attack/scan is
performed. A configuration file in snort contains all
details about servers running in your network as
shown in the figure 2.
UAVVulnerabilities
Design&
Development
Manufacture
Operation
Maintenance
Intentional
Incidental
ICICIS 2021 - International Conference on Innovations in Computer and Information Science
20

Figure 2: List of Servers in Snort.Conf.
Snort (Snort, 2018) can be configured in three main
modes: sniffer, packet logger, and detection mode.
• Sniffer Mode: This phase consists of several
processes such as reading of network packets
and displaying in the console.
• Packet Logger Mode: In this phase packet
logger mode is enabled and certain programs
are present to log packets to the disk.
• Detection System Mode: This is the last
phase in snort in which the detection mode is
on, monitoring of network packets and
analysing is done based on the rule set given
by the user. After detection the defined
actions are performed.
Snort is based on libpcap, a method that is
commonly used in TCP / IP traffic sniffers and
analysers (for library packet capture). Snort detects
attack techniques, including denial of service, buffer
overload, CGI attacks, stealth port checks, and SMB
probes, by protocol analysis and content scanning
and matching. Snort sends a real-time warning to
syslog, a separate 'alerts' file, or to a pop-up window
when unusual activity is observed.
Snort rules are used to identify the malicious
packet incoming in the network then using these
rules user define what he/she wants to do with
malicious packet identified i.e to discard it, dropt it,
log it .Snort rules are basically used to handle the
packets.
In snort one can even define his/her own
customise rules.
alert icmp $ETERNAL_NET any -> $HOME_NET
any (msg:”Shahzad message”; sid:314;rev:5;)
2.1 Process Adopted
Since IP address is a specific address for each device
which is used to transfer data or packets from one
network to the other network over the internet. There
is a message, data, source, destination address, and
much more in-packet. Three IP protocols for
suspicious behaviour are provided by Snort:
• The Transmission Control Protocol (TCP)
links and transfers data between two separate
hosts. HTTP, SMTP, and FTP are examples.
• User Datagram Protocol (UDP): Internet
broadcasts messages. Examples include
traffic via DNS.
• ICMP (Internet Control Message Protocol):
Transfers Windows error messages to the
network. Ping and Traceroute are examples.
A victim machine can use Ubuntu or Windows
operating system in which snort is configured and
using kali Linux an attack/scan is performed. Snort
rules are used to identify the malicious packet
incoming in the network then using these rules user
define what he/she wants to do with malicious
packet identified i.e., to discard it, drop it, log it.
Snort rules are basically used to handle the packets.
In snort one can even define his/her own customise
rules.
I. It starts with downloading and installing
Snort. Snort uses the common libpcap library,
winpcap (for Windows), which is the same
library used by tcpdump to sniff packets.
A single line must include the Snort rules. The snort
rule parser does not accommodate multi-line rules
unless you use a multi-line character \. It is normally
included in the configuration file for snort.conf.
Two rational pieces come with this:
• Rule header: Defines the behaviour of the
rules, such as alerts, register, transfer, trigger,
dynamic and CDIR block.
• Rule options: Define the warning messages
of the regulation.
II. The first variable $HOME_NET is changed
to machine IP address e.g. 192.168.50.8,
while the $EXTERNAL_ NET is left as it is
except for the $HOME_NET.
III. The next step is change in snort rule options,
so to the RULE_PATH, replace ../rules with
c:\Snort\rules and replace ../ so_rules with
c:\Snort\ so_rules. At last, replace../ preproc_
rules with c:\Snort\ preproc_ rules.
Unmanned Aerial Vehicle Attack Detection using Snort
21

Figure 3: HOME_NET IN SNORT.CONF FILE.
IV. Create a directory in snort rule of whitelist
directory same as blacklist directory.
V. Change the configuration of login directory
in a way #config logdir: to config
logdir:c:\Snort\log. It helps in presenting the
output in a particular location.
VI. Now configure the dynamic loaded libraries.
At path to dynamic preprocessor libraries,
replace
usr/local/lib/snort_dynamicpreprocessor with
your dynamic preprocessor, which is
C:\Snort\lib\snort_dynamic -preprocessor.
Similarly, replace usr/
local/lib/snort_dynamicengine/libsf_engine.s
o with the base pre-processor engine, which
is C:\Snort\lib\snort_
dynamicengine\sf_engine.dll.
VII. Once the snort is configured with the
given set of rules, it starts capturing packets
as shown in the figure 4, which include the
alert packet, packet type, and the IP-address
and the priority. It starts monitoring against
the cyber-attacks.
Snort –A console – c/etc/snort/snort.conf.
VIII. As the packet start reaching the victim
machine, it is captured by snort with alert
message as well with the IP address of the
attacker machine.
IX. Now the snort rules come into play, as the
malicious packets has been identified, now
snort rules either discard the packets or log
the packets or to reject the packet based on
the user defined rules. The user can also
define customised rules as per requirement.
alert icmp $ETERNAL_NET any ->
$HOME_NET any (msg:” Shahzad
message”; sid:314; rev:5;).
Figure 4: Network Mapping Through Legion as an Attacking Machine.
ICICIS 2021 - International Conference on Innovations in Computer and Information Science
22
X. The next step is the attacking phase in which
kali linux with any penetration testing tool
like SPARTA or LEGION in which the IP
address of the attacked machine having snort
is input.
3 RESULTS AND DISCUSSIONS
Snort laws must be written so that they correctly
define any of the following events:
• Conditions in which a user assumes that the
network packet(s) is not the same as normal,
or that the packet identity is not authentic.
• Any infringement of the company's security
policies that could endanger the security of
the network of the company and other
sensitive details.
• Both well-known and famous attempts in the
company's network to manipulate the
vulnerabilities.
Based on the extent of the intrusion, the laws
defined by the system should be reasonably
compatible in order to respond promptly and take
the required corrective steps. The rules are not tested
by Snort in the order that they appear in the file of
snort rules. The sequence, by implication, is:
• Alert rules: Use the alert system to create an
alert.
• Log rules: After the alert is produced, the
packet is then logged.
• Pass rules: It refuses and drops the packet.
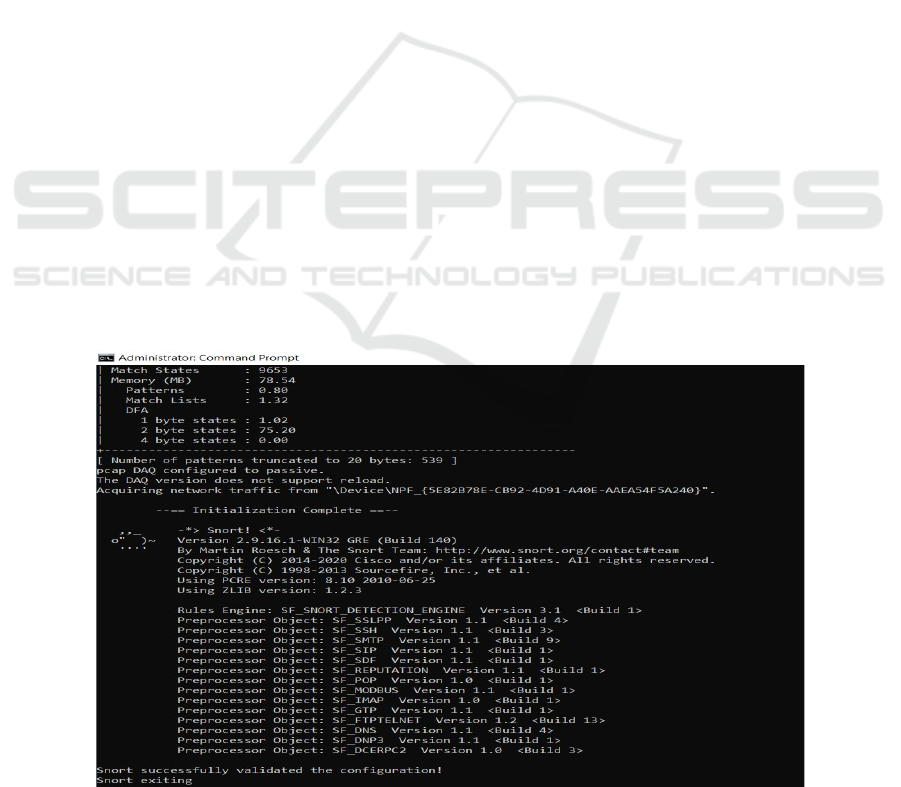
4 CONCLUSIONS
Security is obligation as the UAVs are used in every
aspect from the military operations to day-to-day
life, being controlled remotely from ground base
station and any intrusion to its network can cause
huge damage which could be uncountable. Here the
authors recommended the process of UAV attacks
identification implementing network management
and the packet analysis tool. The proposed method
using snort helped in detecting DOS attack, the GPS
spoofing attack as shown in figure 5 & 6. The
method of detection has the benefit of concurrently
identifying multiple threats using simulation. The
above method can be used and implemented for a
short overview and analysis of vulnerabilities and
threats that can become the source of the risks for
UAVs.
Figure 5: Snort testing successful.
Unmanned Aerial Vehicle Attack Detection using Snort
23

Figure 6: Snort Detecting DDOS Attack.
REFERENCES
D. Muniraj and M. Farhood. Detection and mitigation of
actuator attacks on small, unmanned aircraft systems.
Control Engineering Practice, vol. 83, pp. 188–202,
Feb 2019.
Menaka Pushpa Arthur. Detecting Signal Spoofing and
Jamming Attacks in UAV Networks using a
Lightweight IDS. 978-1-7281-1374-6/19/$31.00 ,2019
IEEE.
Yuliya Averyanova, Lyudmila Blahaja. A Study on
Unmanned Aerial System Vulnerabilities for
Durability Enhancement. 978-1-7281-2592-
3/19/$31.00 2019 IEEE.
H. Shakhatreh, A.H. Sawalmeh, A.I. Al-Fuqaha, Z. Dou,
E.K. Almaita, I.M. Khalil, et al., Unmanned aerial
vehicles (UAVs): a survey on civil applications and
key research challenges, IEEE Access 7 (2019)
48572–48634.
A.A. Zhilenkov, I.R. Epifantsev, Problems of a trajectory
planning in autonomous navigation systems based on
technical vision and AI, in IEEE Conference of
Russian Young Researchers in Electrical and
Electronic Engineering, IEEE, 2018.
H. Sedjelmaci, S. M. Senouci and N. Ansari. A
Hierarchical Detection and Response System to
Enhance Security Against Lethal Cyber-Attacks in
UAV Networks. in IEEE Transactions on Systems,
Man, and Cybernetics: Systems, vol. 48, no. 9, pp.
1594-1606, Sept. 2018.
C. Li, Y. Xu, J. Xia and J. Zhao. Protecting Secure
Communication Under UAV Smart Attack With
Imperfect Channel Estimation in IEEE Access, vol. 6,
pp. 76395-76401, 2018.
L. Xiao, C. Xie, M. Min and W. Zhuang. User-Centric
View of Unmanned Aerial Vehicle Transmission
against Smart Attacks. in IEEE Transactions on
Vehicular Technology, vol. 67, no. 4, pp. 3420-3430,
April 2018.
Park, K. J., Kim, J., Lim, H., & Eun, Y.Robust Path
Diversity for Network Quality of Service in Cyber-
Physical Systems. IEEE Trans. Industrial Informatics,
10(4), 2204-2215.
Snort. Accessed on August. 27, 2018. [online] Available:
https://www.snort.org/
K. Huang and H. Wang. Combating the Control Signal
Spoofing Attack in UAV Systems. in IEEE
Transactions on Vehicular Technology, vol. 67, no. 8,
pp. 7769-7773, Aug. 2018.
Bakkiam David Deebaka, Fadi Al-Turjmanb. Aerial and
underwater drone communication: potentials and
vulnerabilities.TJCME(2018).
ICICIS 2021 - International Conference on Innovations in Computer and Information Science
24
