
Emotion State Induction for the Optimization of Immersion and User
Experience in Automated Vehicle Simulator
Javier Silva
a
, Juan-Manuel Belda-Lois
b
, Sofía Iranzo
c
, Begoña Mateo
d
,
Víctor de Nalda-Tárrega
e
, Nicolás Palomares
f
, José Laparra-Hernández
g
and José S. Solaz
h
Instituto de Biomecánica de Valencia, Universitat Politècnica de València, València, Spain
nicolas.palomares@ibv.org, jose.laparra@ibv.org, jose.solaz@ibv.org
Keywords: Connected and Automated Vehicles, Human Factors, Emotion, Driving Simulator, Physiological Signals.
Abstract: Users’ acceptance is one of the predominant barriers of connected and automated vehicles (CAVS), which
should be addressed at the highest priority. Loss of control, perceived safety and therefore lack of trust are
some of the main aspects that lead to scepticism about the adoption of this technology. Addressing this issue,
the H2020 project SUaaVE seeks to enhance the acceptance of CAVS through understanding the passengers’
state and managing corrective actions in vehicle for enhancing trip experience. The research to understand
passenger emotions is mainly based on experimental tests consisting in immersive experiences with subject’s
participation in a simulated CAV, specifically adapted to SUaaVE research purposes. This paper present
different strategies to obtain realistic simulations with high levels of immensity in these tests using a dynamic
platform with the objective of studying the emotional reaction of the subjects in representative scenarios and
events within the framework of CAVs.
1 INTRODUCTION
The automation of driving is changing the role of
humans so that SAE levels L4 and L5 of automated
vehicles (SAE International, 2021) will take over all
control and monitoring tasks for specific applications
performed by humans in conventional motor vehicles
(Drewitz et al., 2020). However, the lack of control
can lead to lack of trust among users of fully
automated vehicles (Lee & See, 2004), identified as a
key issue in the acceptance and adoption of this
emerging technology (Bazilinskyy et al., 2015). In
this regard, trust in automation is strictly related to
”emotions on human-technology interaction, which is
a key factor for acceptance, but is also important for
safety and performance” (Lee & See, 2004). For this
reason, it should be a factor considered when
a
https://orcid.org/0000-0001-5115-1392
b
https://orcid.org/0000-0002-7648-799X
c
https://orcid.org/0000-0003-2579-7135
d
https://orcid.org/0000-0003-2633-8993
e
https://orcid.org/0000-0002-0988-341X
f
https://orcid.org/0000-0002-4523-341X
g
https://orcid.org/0000-0002-7121-5418
h
https://orcid.org/0000-0002-2058-9591
designing complex, high-consequenced systems like
Connected Automated Vehicles (CAVs) (Paddeu et
al., 2020).
With this situation, H2020 SUaaVE project
(SUpporting acceptance of automated VEhicle), aims
to enhance the acceptance of CAVs through the
formulation of ALFRED: A human centred artificial
intelligence to humanize the vehicle actions of the
CAV by understanding the passengers’ state and
managing corrective actions in vehicle for optimizing
trip experience. One of the main challenges in
SUaaVE, and in line with recent studies regarding
empathic vehicles (Braun et al., 2020), is the emotion
recognition of the vehicle occupants. It is also
important to consider mental stress in the
identification of these emotions in perception and
cognition in drivers above all due to the possible
affection of burn-out syndromes (Cuzzocrea et al.,
Silva, J., Belda-Lois, J., Iranzo, S., Mateo, B., de Nalda-Tárrega, V., Palomares, N., Laparra-Hernández, J. and Solaz, J.
Emotion State Induction for the Optimization of Immersion and User Experience in Automated Vehicle Simulator.
DOI: 10.5220/0010722700003060
In Proceedings of the 5th International Conference on Computer-Human Interaction Research and Applications (CHIRA 2021), pages 251-257
ISBN: 978-989-758-538-8; ISSN: 2184-3244
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
251

2013). The measurement of these emotions is based
on the obtention of arousal (level of intensity) and
valence (level of pleasantness). These values can be
estimated from physiological signals:
Electrocardiogram (ECG), heart rate (HR), galvanic
skin response (GSR), skin temperature (T) and facial
electromyogram (EMG) from the corrugator and
zygomatic muscles (Shu et al., 2018). Other
approaches could also include additional behavioral
parameters (facial expression according to
landmarks, blinking, etc.) (Suja et al., 2014).
In order to understand the passenger emotions, the
research is mainly based on experimental tests
consisting in immersive experiences with subject’s
participation in a simulated CAV, specifically
adapted to SUaaVE research purposes. This enables
to monitor the subjects’ reactions in different
situations and contexts within the framework of
automated vehicles.
This paper describes the experimental design for
the first test of the project in a driving simulator. The
aim is to provide and immersive experience to the
participants with the objective of eliciting relevant
and characteristic emotions in the framework of
automated vehicles while gathering their
physiological reaction.
2 METHODS
2.1 Experimental Design
The main objective of the experimental tests was to
analyse the subject’s response to different on-board
situations and circumstances on an automated
vehicle.
According to that purpose, we defined a set of
scenarios required to validate the emotional model.
These scenarios were designed to elicit the most
representative emotions that passengers can feel in
the framework of automated vehicles, thus can be
represented by different values of arousal and
valence. These emotions are: Fear, hope, pity,
satisfaction, distress, anger, relief and joy. The
elaboration of these relevant and critical scenarios
was defined in a previous study within SUaaVE using
people-oriented innovation techniques and with the
participation of 592 subjects from different EU
countries by means of online qualitative research
tools and surveys (Belda et al., 2021).
A total of seven scenarios were generated through
an open-source simulator for autonomous driving
research (CARLA) with a duration between 3 and 5
minutes. The first scenario is a manual driving. The
purpose of this one was to get to know the dynamics
of the platform, the simulated dimensions of the car,
visual perspective, sounds and in general to get
familiarized to the simulation environment. Five
more scenarios were designed in order to simulate full
automated driving (L5), whereas one more scenario
simulates automated driving (L4+) with a car failure,
requiring to take over the vehicle (manual driving due
to an electronic failure in the vehicle). Within this
scenario, several options can be taken. For example,
before a highway exit during autonomous mode from
vehicle, the participant is requested to take over the
car to drive inside an urban area. In case the
participant does not take over, the vehicle stops safely
after the new lane entrance. In Figure 1, a screenshot
of one of these scenarios is depicted.
Figure 1: Example screenshots of some scenarios used in
the test.
The experimental session has been designed in
order not to exceed the duration of two hours.
2.2 Immersion Methods for
Participants
The tests were performed in The Human Autonomous
Vehicle (HAV) at IBV, shown in Figure 2, a complete
dynamic driving simulator (six degrees of freedom)
that allows to emulate the behaviour of a vehicle with
different degrees of autonomy enabling fully
immersive driving experience.
It is composed by 3 large screens to facilitate the
immersion and includes steering wheel and pedals for
simulating low levels of automation. The simulator
provides surrounding sounds to the participants
representing engine sounds (emulating the sound of
an electric car), the road and other cars passing by.
HAV includes an instrument panel that provides
complete information of the vehicle to the participant,
including speed, regenerative braking, battery level,
information trip (expected time of arrival) and
information failure. Both trip and failure information
are also notified redundantly through audio messages.
SUaaVE 2021 - Special Session on Research Trends to Enhance the Acceptance of Automated Vehicles
252

Figure 2: Example of HAV simulating the behaviour of an
autonomous vehicle in a highway.
In order to adjust and validate the procedure
protocol for the test, a pre-pilot test with 6
participants was conducted. Participants were internal
IBV staff and also external participants (to avoid
potential bias in their results). According to the
preliminary results obtained, we designed and
implemented an extra set of strategies to optimize the
user experience enhancing the realism to improve the
participants’ attention during the test. These strategies
are defined next:
Initial context: Imagination is one of the simplest
emotion induction techniques, so in the
beginning of each scenario, we needed the
participants to imagine situations that elicit
emotions. At first, the technician in charge of the
tests informed the participants that they were in
a hurry to reach the destination. We noticed that
films, more than any other art forms, have a way
of drawing viewers into a situation that helps
people empathize and identify themselves with
characters. After that, we recorded videos with
professional actors reading a script that later
were played before the scenario. With emotions
and personality expressions hidden in the voice
of the actor and a detailed storytelling we can
elicit an initial cognitive load in the participant.
Thus there are more examples in literature in
which the formulation of methods to augment the
construction of predictive models with domain
knowledge can provide support for producing
understandable explanations for prediction, as it
is one of the future objectives of this
experimentation (Holzinger & Kieseberg, 2020).
Feedback during scenario: In each scenario,
visual and audible information was provided
through a Human-Machine Interface (HMI) in
the HAV central console and audio messages
were played as if it was an AI virtual assistant,
providing time to destination, vehicle status and
other trip information. A screenshot of the HMI
is shown in Figure 3.
This information lets the participant know the
driving mode (sportive, eco, etc.) weather
conditions that could affect the vehicle’s
roadmap (like cloudy, rainy or windy), status of
traffic (like good fluency or jams in several
locations on the way) and more pills that could
affect the emotional state of the passenger of an
autonomous vehicle circulating in both urban and
intercity trips. Results of a metanalysis on 32
studies with a total of 2468 participants showed
that the success-failure manipulation through
real time feedback is a reliable induction
technique to evoke both positive and negative
affective reactions (Nummenmaa & Niemi,
2004).
Figure 3: Detail of the HMI.
Embodiment: It can be a powerful tool to elicit
cognitive emotion to participants. For instance,
in one of the designed scenarios we force
postural change in order to catch a smartphone
ringing with a call that asks you to finish a certain
office task (while making eye contact with the
simulated road). This obliges the user to take a
similar attitude than when there is a stressful
situation at work.
In order to gather the subjective assessment of the
subjects, after each scenario, the participants reported
the emotions felt regarding every specific event of the
journey conducted in the scenarios through the scales
of Arousal and Valence from the Self-Assessment
Manikin (SAM) (Bradley & Lang, 1994). The value
of valence in a scale from 1 to 9 refers to the negative
or positiveness of the emotion felt. In the same way,
arousal refers to the intensity of the emotion in terms
of calmness or excitation, as seen in Figure 4. A
number of 30 events were evaluated including all
scenarios.
Emotion State Induction for the Optimization of Immersion and User Experience in Automated Vehicle Simulator
253

Figure 4: SAM questionnaire.
2.3 Participants
A total of 50 volunteers integrated the subject sample
in the test. This sample is composed of car drivers
between 25 and 55 years old, aged and BMI balanced.
The sample has an equal distribution of males and
females.
Exclusion conditions regarding the requirements
of the participants were simple. They do not have to
suffer visual & hearing impairment (wearing glasses
was allowed) and generally not suffering motion
sickness in transport. Thus, they had to come without
drowsiness, alcohol or drug issues in previous hours.
The participants’ physiological signals were
continuously monitored and synchronized with the
simulator. The synchronization is needed to associate
the scenario events with the onset of the participants’
emotional reactions.
The test was approved by the Ethical Committee
of the Polytechnic University of Valencia (UPV).
2.4 Acquisition instrumentation
We used different equipment to gather biosignals and
behaviour of the participants during the test. The
equipment used to gather the biometrics,
physiological data acquisition, were:
Biosignalsplux©. This equipment, shown at left
in Figure 5, allows high-quality physiological
signals acquisition by placing electrodes over
the skin with a high-resolution sample
frequency. This device gives accurate
measurements and it is very flexible for
synchronizing with other devices, like, for
instance, the software of the driving simulators.
Empatica E4© wristband (see right part in Figure
5). A non-invasive equipment and the only
wearable on the market to combine
Electrodermal Activity (EDA)
Photoplethysmography (PPG) and Temperature
sensors, simultaneously enabling the
measurement of the duality between sympathetic
vs parasympathetic nervous system activity.
Figure 5: Left: biosignalsplux©. Right: Empatica E4©
wristband.
The aim of measuring with both equipment is to
have a more complete overview of physiological
changes as a result of the fight between sympathetic
and parasympathetic systems. On one hand, the
Biosignals Plux allows a deeper analysis of the
physiological reactions in a more accurate way. On
the other hand, Empatica E4 allows to measure the
signals in a much less invasive way, so it could be
used in latter stages of tests (being easier to wear by
the test subjects) once the signals are better
characterized.
In general, the signals collected through these
sensors are involuntary and subconscious, and then,
they are hardly falsifying, so they can be used to
assess emotional states in a continuous way and they
are non-disruptive to the performance of the task.
Through different processing and analysis we could
obtain comparable outputs among them. The
information about the physiological signals acquired
is described in the following section.
Regarding the study of the participant’s physical
behaviour, a camera was placed in front of the driving
simulator to gather the facial gestures and understand
the participant’s reactions. There are several
software-based tools in the market able for analysing
facial expression such as the Affectiva Affdex
emotion recognition by iMotions© or Rekognition
service by Amazon Web Services©. These software
toolboxes detect changes in key face features (i.e.,
facial landmarks such as brows, eyes, and lips) and
generates data representing the basic emotions of the
recorded face. A photo of this sensor in the HAV and
the image acquired is depicted in Figure 6. More
information about the parameters calculated is
described in the following section.
This experimental data (physiological signals,
SAM questionnaires, labels with emotion type,
arousal, valence and facial videos) are the input to
generate the emotional model.
SUaaVE 2021 - Special Session on Research Trends to Enhance the Acceptance of Automated Vehicles
254

Figure 6: Left: camera placed in the driving simulator.
Right: Example of facial landmarks of Affectiva.
2.5 Data Gathered
The set of physiological signals acquired and
visualized in real time for each participant during the
whole test are detailed next:
Electrocardiogram (ECG) sensor (in case of
biosignalplux) and Blood Volume Pulse (BVP)
sensor (in case of Empatica) to obtain the heart
rate (HR) and heart rate variability (HRV).
Skin conductance sensor to record the electro
dermal activity (EDA).
Two facial electromyography (EMG) sensors to
record recruitment activity of zygomaticus
major and corrugator supercilia muscles.
Infrared thermopile sensor to gather the
peripheral skin temperature (only available in
Empatica E4© wristband).
Regarding behavioural data, we are able to
calculate the following parameters using facial
landmarks analysis:
Basic emotions: Calmness, Joy, Anger,
Surprise, Fear, Sadness, Disgust and Contempt;
with probability scores on a 0-100% scale.
Valence (measure of how positive or negative
the expression is).
Engagement: A general measure of overall
engagement or expressiveness.
Attention. Measure of point of focus of the
subject based on the head position.
Interocular Distance: the distance between the
two outer eye corners.
Pitch, Yaw, & Roll: x, y, & z rotation of the
head.
The physiological signals and the videos are
synchronized with the time of each scenario using
UNIX timestamps.
Besides objective measures, as mentioned before,
the subjective opinion of participants was also
collected.. It was gathered through:
Socio-demographic profile form: Age, gender,
driving experience and preferences.
SAM questionnaire (Geethanjali et al., 2017).
Appraisal of the emotional state of the
participant (level of arousal and valence) with
regards to different events on road.
Survey to assess acceptability and acceptance
from the perspective of automated vehicles and
developed in SUaaVE by the University of
Groningen (Post et al., 2020).
Since each physiological signal has its own
representation, all of them requires to be set in the
same proper scale. As we aim at having a continuous
representation of the emotional state of the
participants (in the domain of valence and arousal),
physiological signals are calibrated with a self-
reported emotional status at some specific times.
3 RESULTS
A preliminary analysis confirmed the hypothesis of
providing a higher immersive user experience with
the strategies aforementioned. This was observed by
the comparison of the physiological signals of the
participants performing the test with the strategies
and without them (in the pre-pilot test). More
concretely, it was noticed a more variable interval
within heart and breathing rate and a higher quantity
of responses generated by the sympathetic nervous
system (shown by the number of peaks detected in the
electrodermal activity signal of participants) in the
test with the strategies.
The emotional reactions and their variation are
also seen in the subjective assessment indicated by
the subjects after the end of each scenario through
SAM questionnaire. Figure 7 and Figure 8 show an
example of the mean values of arousal and valence
reported in two selected scenarios in the test with
strategies. As it can be seen, there are different events
in the scenarios where the interval relative to the
range in Arousal and Valence is higher than 2.5 points
in the scale, confirming the variation in the emotion
felt by the subjects. This means high intensity with
negative feeling of emotion load.
Regarding arousal, the mean values reached 7
points in events where the car gets closer to another
vehicle circulating at high speeds in the highway (3
rd
event in scenario 2) and 6 points while raining and the
participant witnesses an accident of other vehicle (3rd
event in scenario 4). Having in mind the complete
scale is from 1 to 9, these values in the upper third
part of intensity of emotion proves a good immersion
into the scenarios feeling the events with enhanced
intensity.
Emotion State Induction for the Optimization of Immersion and User Experience in Automated Vehicle Simulator
255
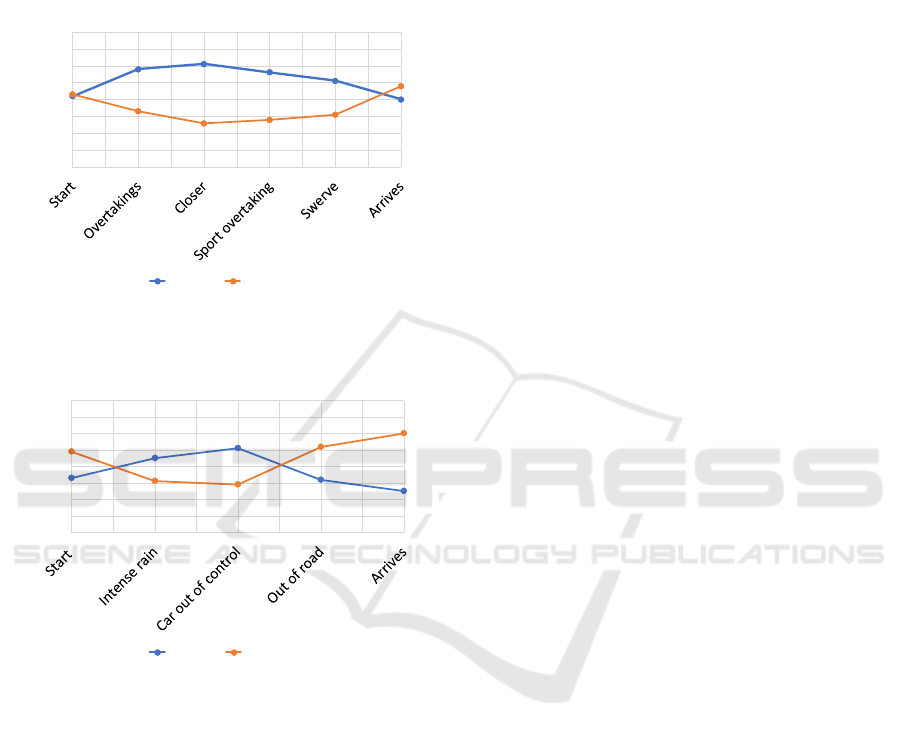
We can observe the same behaviour in valence
values reported in these events, where the values
nearly reach 3.5 points in both cases. Furthermore, in
the final event from scenario 4, participants agree in
arriving with a low emotional load in terms of arousal
with a positive feeling in terms of valence (around 7).
Figure 7: Mean SAM results in questionnaires from
scenario 2 per event.
Figure 8: Mean SAM results in questionnaires from
scenario 4 per event.
After a deep analysis of the data, the expected
result is the database of physiological signals in the
different autonomous driving situations and their self-
appraisal of the emotion felt. This database is used to
generate the dimensional emotional model. To this
purpose, the most appropriate classificatory system is
selected. These include: Artificial Neural Networks
(ANN), Convolutional Neural Networks (CNN),
Recurrent Neural Networks such as the bidirectional
Long Short Term Memory (BLSTM) or
Transformers, Support Vector Machines (SVM),
Relevance Vector Machine (RVM), Linear
Discriminant Analysis (LDA) and others (Bong et al.,
2013; Jang et al., 2012; Mohamad, 2005; Shu et al.,
2018).
In these preliminary analyses, the initial results
also show that the emotions felt varies from events
according to the scenario and it is also gender
dependent (variations in sentiment whether the
participant was a female or a male). However, the
emotion is independent of the achievement (on time
or not) of the task of the different scenarios.
4 DISCUSSION
SUaaVE seeks to integrate the human component in
CAVs through understanding the emotional state of
the occupants. In this regard, the immersion strategies
defined in this study are a key aspect for studying the
occupants reactions in a realistic way in a driving
simulator.
This study means the first step to generate a model
so as to characterise drivers and passengers in L4+
CAVs from their physiological signals, to study the
factors that might influence their emotional reactions
during the trip. In fact, a better estimation of the
occupants state can be used for the identification,
together with vehicle sensors (cameras, radar,
and LiDAR), of those factors that influence their
emotional state, such as the vehicle dynamics (ride
comfort), the environmental conditions (traffic
density, behaviour other vehicles, presence of VRUs,
etc.), or the interior ambient conditions & design. It
also enables to consider the human factor in the
development of advanced driver assistance systems
(ADAS) as well as to support the artificial
intelligence of the CAV by adjusting the decision-
making algorithms of vehicles in terms of dynamics
and itinerary for a comfortable and safe ride. In short,
understand how we feel in a CAV and use such
information to make system more empathic,
responding to the occupant emotions in real time.
5 CONCLUSIONS
This paper addresses different strategies to enhance
the immersivity and engagement of subjects while
conducting tests in a driving simulator in the
framework of automated vehicles.
The results of the test performed with these
strategies showed that participants felt immerse in the
simulation and that they could evaluate the events in
the different scenarios as if they were real, with
intense emotions noted both in objective and
subjective feedback obtained from them, as it is the
physiological signals, which were continuously
monitored and by questionnaires respectively.
The following steps in SUaaVE, using as a basis
the data base obtained from the tests with subjects
(physiological signals and subjective assessment) is
1
2
3
4
5
6
7
8
9
LevelofValence
/
Arousal
EventsinScenario2
Arousal Valence
1
2
3
4
5
6
7
8
9
LevelofValence/Arousal
EventsinScenario4
Arousal Valence
SUaaVE 2021 - Special Session on Research Trends to Enhance the Acceptance of Automated Vehicles
256

the generation of an emotional model aimed to
estimate the passengers state from their physiological
signals.
ACKNOWLEDGEMENTS
This work were funded by the European Union’s
Horizon 2020 Research and Innovation Program
SUaaVE project: “SUpporting acceptance of
automated Vehicles”; under Grant Agreement No.
814999.
REFERENCES
Bazilinskyy, P., Kyriakidis, M., & de Winter, J. (2015). An
international crowdsourcing study into people’s
statements on fully automated driving. Procedia
Manufacturing, 3, 2534–2542.
Belda, J.-M., Iranzo, S., Jimenez, V., Mateo, B., Silva, J.,
Palomares, N., Laparra-Hernández, J., & Solaz, J.
(2021). Identification of relevant scenarios in the
framework of automated vehicles to study the emotional
state of the passengers. 10th International Congress on
Transportation Research, Rhodes, Greece.
Bong, S. Z., Murugappan, M., & Yaacob, S. (2013).
Methods and approaches on inferring human emotional
stress changes through physiological signals: A review.
International Journal of Medical Engineering and
Informatics, 5(2), 152–162.
Bradley, M. M., & Lang, P. J. (1994). Measuring emotion:
The self-assessment manikin and the semantic
differential. Journal of Behavior Therapy and
Experimental Psychiatry, 25(1), 49–59.
Braun, M., Weber, F., & Alt, F. (2020). Affective
Automotive User Interfaces–Reviewing the State of
Emotion Regulation in the Car. ArXiv Preprint
ArXiv:2003.13731.
Cuzzocrea, A., Kittl, C., Simos, D. E., Weippl, E., & Xu, L.
(Eds.). (2013). Availability, Reliability, and Security in
Information Systems and HCI (Vol. 8127). Springer
Berlin Heidelberg. https://doi.org/10.1007/978-3-642-
40511-2
Drewitz, U., Ihme, K., Bahnmüller, C., Fleischer, T., La,
H., Pape, A.-A., Gräfing, D., Niermann, D., & Trende,
A. (2020). Towards user-focused vehicle automation:
The architectural approach of the AutoAkzept project.
International Conference on Human-Computer
Interaction, 15–30.
Geethanjali, B., Adalarasu, K., Hemapraba, A., Kumar, S.
P., & Rajasekeran, R. (2017). Emotion analysis using
SAM (self-assessment manikin) scale. Biomedical
Research.
Holzinger, A., Kieseberg, P., Tjoa, A. M., & Weippl, E.
(Eds.). (2020). Machine Learning and Knowledge
Extraction: 4th IFIP TC 5, TC 12, WG 8.4, WG 8.9, WG
12.9 International Cross-Domain Conference, CD-
MAKE 2020, Dublin, Ireland, August 25–28, 2020,
Proceedings (Vol. 12279). Springer International
Publishing. https://doi.org/10.1007/978-3-030-57321-8
Jang, E.-H., Park, B. J., Kim, S. H., & Sohn, J. H. (2012).
Emotion classification by machine learning algorithm
using physiological signals. Proc. of Computer Science
and Information Technology. Singapore, 25, 1–5.
Lee, J. D., & See, K. A. (2004). Trust in automation:
Designing for appropriate reliance. Human Factors,
46(1), 50–80.
Mohamad, Y. (2005). Integration von emotionaler
Intelligenz in Interface-Agenten am Beispiel einer
Trainingssoftware für lernbehinderte Kinder. RWTH
Aachen University.
Nummenmaa, L., & Niemi, P. (2004). Inducing affective
states with success-failure manipulations: A meta-
analysis. Emotion, 4(2), 207–214. https://doi.org/
10.1037/1528-3542.4.2.207
Paddeu, D., Parkhurst, G., & Shergold, I. (2020). Passenger
comfort and trust on first-time use of a shared
autonomous shuttle vehicle. Transportation Research
Part C: Emerging Technologies, 115, 102604.
Post, J. M. M., Ünal, A. B., & Veldstra, J. L. (2020).
Deliverable 1.2. Model and guidelines depicting key
psychological factors that explain and promote public
acceptability of CAV among different user groups.
H2020 SUaaVE project.
SAE International. (2021). J3016C: Taxonomy and
Definitions for Terms Related to Driving Automation
Systems for On-Road Motor Vehicles - SAE
International.
Shu, L., Xie, J., Yang, M., Li, Z., Li, Z., Liao, D., Xu, X.,
& Yang, X. (2018). A review of emotion recognition
using physiological signals. Sensors, 18(7), 2074.
Suja, P., Tripathi, S., & Deepthy, J. (2014). Emotion
Recognition from Facial Expressions Using Frequency
Domain Techniques. In S. M. Thampi, A. Gelbukh, &
J. Mukhopadhyay (Eds.), Advances in Signal
Processing and Intelligent Recognition Systems (pp.
299–310). Springer International Publishing.
https://doi.org/10.1007/978-3-319-04960-1_27
Emotion State Induction for the Optimization of Immersion and User Experience in Automated Vehicle Simulator
257
