
Towards Acceptance of Automated Driving Systems
Samantha Jamson
1
, Konstantinos Risvas
2
, Roi Naveiro
3
, David R
´
ıos Insua
3
,
Konstantinos Moustakas
2
, Mikolaj Kruszewski
4
, Aleksandra Rodak
4
and Alessandro Barisone
5
1
Institute for Transport Studies, University of Leeds, U.K.
2
Electrical and Computer Engineering Department, University of Patras, Greece
3
Institute of Mathematical Sciences (ICMAT-CSIC), Madrid, Spain
4
Motor Transport Institute, Warsaw, Poland
5
algoWatt S.p.A, Italy
{mikolaj.kruszewski, aleksandra.rodak}@its.waw.pl, alessandro.barisone@algowatt.com
Keywords:
Automated Driving Systems, Trust and Acceptance, Request to Intervene, Decision Support, Human Machine
Interfaces.
Abstract:
The acceptance of Automated Driving Systems is of key importance since it will determine whether they
will actually be used. This presentation describes contributions in this broad area from the perspective of the
Trustonomy project with a focus on ethical decision support, human machine interfaces and trust assessment,
aimed at enhancing the experience of drivers and passengers in such vehicles.
1 MOTIVATION
Automated driving systems (ADS) are poised to con-
stitute a major technological innovation reshaping
transportation as we know it. Recent breakthroughs
in Artificial Intelligence (AI), coupled with advances
in computational hardware, have had a revolution-
ary effect on ADS allowing cutting-edge control al-
gorithms to be executed in real time. Despite these
advances, it is generally recognised that ADS tech-
nology will not be widely deployed in the immediate
future: its incorporation onto global roadways will be
a gradual process (Mahmassani, 2016). Combined
with the electrification of vehicles and a change in
the concept of car ownership, ADS would conform
a future in which we would expect fewer accidents,
less pollution, less wasted travel time, and increased
traveling possibilities for many collectives, including
the elderly (Burns and Shulgan, 2019). This paper
presents contributions from the Trustonomy project
(https://h2020-trustonomy.eu/) in the areas of
ethical decision support, human machine interfaces
and human factors geared towards increasing trust and
acceptance in ADS so as to accelerate their adoption.
2 CONTEXT
A gradual progression from manned vehicles (MV)
to ADS is widely expected. Its stages are shown in
the SAE six-level driving automation taxonomy, with
level 0 describing vehicles with no automated capac-
ity, and levels 1 through 5 representing vehicles with
increasing automated features culminating in fully au-
tomated, level-5 ADS. Over the last decade, manufac-
turers have begun to produce vehicles of higher au-
tomation levels, in particular level-1 and -2. However,
many crucial limitations related to ADS safety and
operational robustness will likely restrict automated
vehicles on roads to, at best, levels 3 and 4 over the
next decade.
Figure 1 integrates relevant impacts of ADS
through a diagram illustrating the interconnected na-
ture of numerous factors related to their adoption.
Dotted nodes refer to positive impacts; light grey
nodes, to negative ones; white nodes, to other im-
pacts, not necessarily positive or negative, that need
to be addressed. Dark grey nodes refer to contextual
factors (e.g., trust in ADS) that might have a major
influence on the massive deployment of ADS.
Many factors in Figure 1 can be indeed read-
ily assumed as positive. For example, provided that
the driving error of human operators exceeds that
232
Jamson, S., Risvas, K., Naveiro, R., Insua, D., Moustakas, K., Kruszewski, M., Rodak, A. and Barisone, A.
Towards Acceptance of Automated Driving Systems.
DOI: 10.5220/0010721300003060
In Proceedings of the 5th International Conference on Computer-Human Interaction Research and Applications (CHIRA 2021), pages 232-239
ISBN: 978-989-758-538-8; ISSN: 2184-3244
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
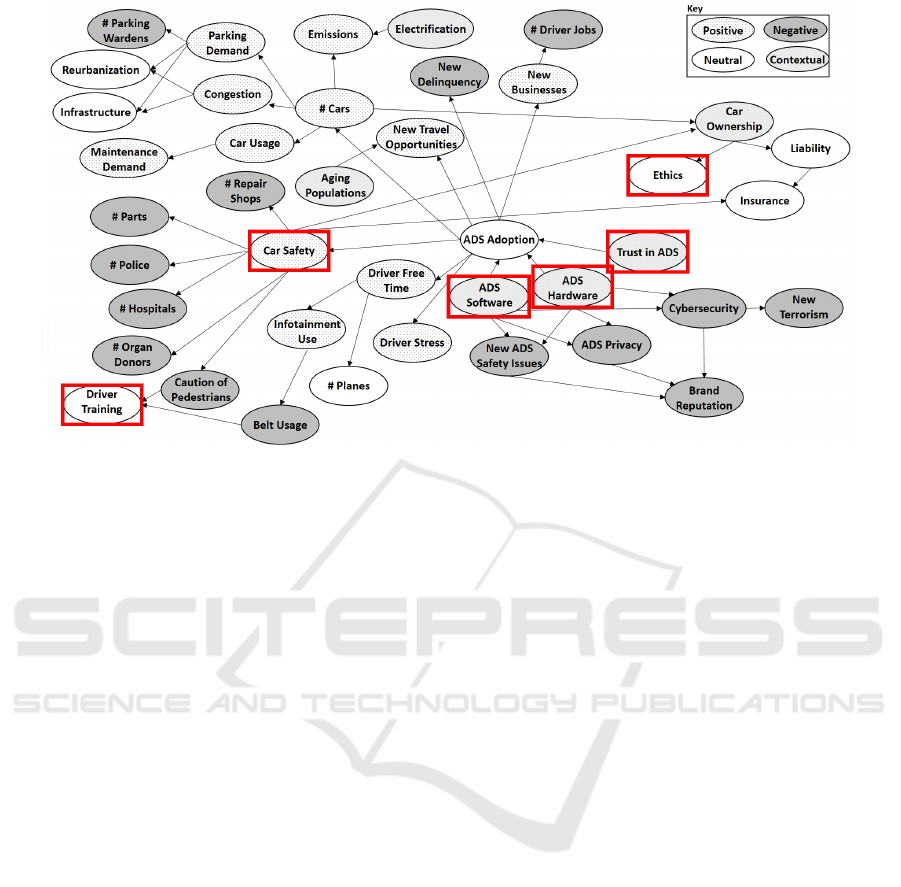
Figure 1: ADS Impacts on Society. Adapted from (Caballero et al., 2021b).
of ADS technology, roadway safety can be expected
to increase. However, other impacts are perceived
negatively: although some professions may be re-
envisioned using ADS, others may be at risk, like e.g.,
taxi drivers, as a consequence of the availability of
competitive automated taxis. Similarly, the elimina-
tion of human error does not imply the elimination of
machine error. As a consequence, third parties manu-
facturing ADS safety systems will face greater vulner-
ability to liability lawsuits and reputation risk. Other
impacts associated with the massive adoption of ADS
will require a major re-definition of the current status
quo, without necessarily having positive or negative
connotations. For example, driver training will need
to evolve.
Despite the major benefits that massive adoption
of ADS will bring, a core issue with these new tech-
nologies is the need to build acceptance and trust in
society to facilitate ADS adoption. This is the core
objective of the Trustonomy project which drives our
discussion here. Trustonomy involves 16 partners
across Europe covering 4 pilots in Poland/Finland,
UK, Italy and France. It is framed according to six
pillars related with: (1) driver state monitoring (DSM)
systems assessment; (2) curricula for driver training
in ADS; (3) driver intervention performance assess-
ment (DIPA); (4) ethical automated decision support
framework, covering liability and risk assessment; (5)
Human Machine Interfaces (HMI) assessment; and
(6) measuring trust and acceptance. The related nodes
in Figure 1 are marked with a red rectangle. For space
reasons, we focus on the last three topics.
3 ETHICAL DECISION SUPPORT
FOR ADS
For reasons outlined above, level -3 and -4 vehicles
are the primary focus of Trustonomy. Such ADS
require human intervention when operating outside
of their specified operational design domain (ODD).
That input is solicited through an HMI via a request to
intervene (RtI) operation, which is core in the project.
Until level-5 vehicles predominantly populate global
roadways, RtI decisions and their management will
remain a crucial, safety-related issue. Relatively few
studies focus on the RtI management. This section
sketches a solution.
Consider a level-3 or -4 ADS for which several
driving modes are available (typically, automated,
manual and emergency). A decision-analytic frame-
work is utilized to manage the RtI operations as in
Figure 2. The main workflow can be summarized
as follows. At each time t, the environmental and
DSM systems observe both the state of the environ-
ment and the driver. Based on past observations, a
forecast of future states is produced and the planned
trajectory is updated. If the forecasts indicate that it
is very likely that the vehicle will be outside its ODD
limits in the near future, an RtI should be executed.
If the RtI is accepted, the intervention will be as-
sessed via a DIPA. This approach emphasizes a man-
agement by exception principle (West and Harrison,
2006) wherein a group of models is used for infer-
ence, prediction and decision support under standard
Towards Acceptance of Automated Driving Systems
233
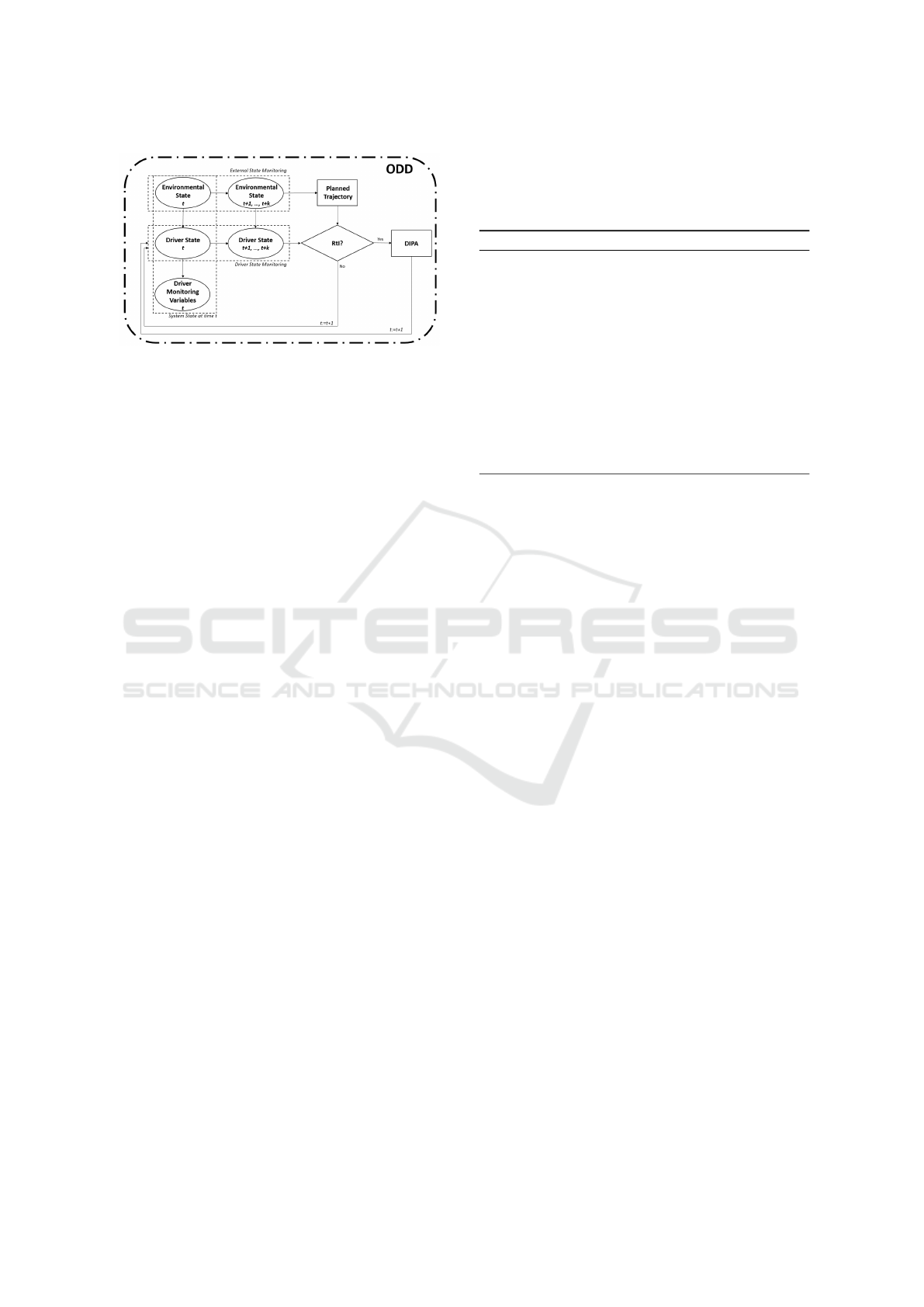
Figure 2: Decision support for ADS.
driving circumstances until an exception arises that
triggers an RtI. The approach incorporates warnings
to raise driver awareness which can be modulated in
two directions: (1) several alert levels (e.g., warning
and critical) can be introduced; (2) if an alert must be
issued repeatedly, the HMI system can successively
amplify the alert (e.g., increase volume of subsequent
warnings).
To integrate and update information from key
sources in a coherent manner, a Bayesian approach
is utilized based upon observed system behavior. D
t
will designate the data set available up to time t in-
corporated from the ADS sensors. Typically, most
ADS maneuvers, tasks and local trajectory planning
are scheduled a few steps ahead, e.g., k = 10 time in-
tervals of 0.5 seconds, depending on driving condi-
tions but at a minimum covering the driver’s reaction
time plus some safety buffer.
The key modules incorporated in our architecture
and utilized to manage transitions between driving
modes are: (1) an operational design domain moni-
toring system, (2) environment and DSM systems, (3)
a trajectory planning system, (4) a system for driving
mode assessment and finally (5) a module for DIPA
(details can be found in (Insua et al., 2021)). The core
system periodically issues predictive risk assessments
based on compliance with the ODD. If the predic-
tive probability of exceeding the ODD is sufficiently
large, the ADS alerts the driver, and assesses the au-
tomated and manual driving modes. If automated is
preferable, as the ADS is critically approaching its
design limits, the system should enter the emergency
mode and issue the appropriate alert. If manual mode
is preferred, an RtI is issued to the driver through the
HMI followed by a DIPA. If the driver performs too
poorly, as assessed from the DIPA model, the driver
is perceived not to be in good condition and the emer-
gency mode is triggered. Otherwise, the driver takes
back control until further notice.
Algorithm 1 summarises the complete ADS man-
agement procedure. There are three modes AUTO,
MANUAL, EMERG. Commands on the same line are
processed in parallel. The variables ψ
0
and ψ
1
desig-
nate the assessment (k steps ahead) of the AUTON
and MANUAL modes, respectively.
Algorithm 1: ADS controller.
Input: Priors for ODD, environment, driver state. Utility
function
Output: Trajectory from ORIGIN to DESTINY (and
implementation of commands when in AUTO or
EMERG modes).
while DESTINY not reached do
Read internal sensors. Read external sensors.
Forecast Environment k steps ahead. Forecast driver
..... state k steps ahead. Compute trajectory.
Assess driving modes (ψ
0
, AUTO; ψ
1
, MANUAL).
..... Issue WARNINGS.
Manage from DRIVING MODE. If DIPA pending,
.....resolve
end while
Our driving mode management framework is
rooted in statistical decision theory, (French and In-
sua, 2000). Therefore, the selected utility function
to assess driving modes and inform ADS’ decisions
is critical. One of the most contentious topics in
ADS research relates to their decision making in po-
tentially fatal situations, particularly the ethics as-
sociated with their automated decision making. As
is generally the case with revolutionary technolo-
gies, the widespread adoption of ADSs is accom-
panied by numerous moral uncertainties. Unfortu-
nately, in addressing these dilemmas, decision makers
are forced to grapple with unenviable ethical quan-
daries. Notably, (Awad et al., 2018) developed an on-
line experimental platform called the Moral Machine
wherein users repeatedly resolve trolley problems to
gain insight into societal ethical preferences. Alter-
natively, we propose using a generic multi-attribute
utility model for ADS management that would allow
designers, owners and policymakers to tailor ADS be-
havior according to their own ethical position. The
selected objectives, attributes and structure of the
multi-attribute utility determine the ethical perspec-
tive adopted and can accommodate multiple ethical
viewpoints as in (Keeney, 1984). Managing ADS de-
cisions in this way allows for ethical, operational, and
regulatory trade-offs to be developed and studied in a
computationally tractable manner. Moreover, this re-
search furthers the collective study of ADS ethics and
provides a means, in the far-term, to inform regula-
tion. Conversely, the near-term aim of this research
is the provision of decision-analytic support for ADS
design and operations. As these cover both short- and
long-horizon decisions in a dynamic environment, the
same set of objectives are considered in multiple de-
cision making contexts.
SUaaVE 2021 - Special Session on Research Trends to Enhance the Acceptance of Automated Vehicles
234
The ethics associated with a multi-attribute util-
ity function are primarily determined by (1) the pref-
erence model’s functional form, (2) the selected ob-
jectives, (3) the associated attributes, and (4) the ob-
jective weights utilized. The proposed objectives and
attributes are presented in Table 1, where we have
included natural, constructed and proxy attributes in
the standard decision analytic description. The pref-
erence model’s functional form follows the principles
of normative decision theory. As it is natural that the
preferences of most stakeholders will satisfy mutual
preference and utility independence (Keeney et al.,
1993), we propose using multiplicative multi-attribute
utility functions, see (Caballero et al., 2021a).
An interesting fact of managing ADS decisions
under a normative decision theoretic approach is that
the effect of objective weights on liability can be
readily observed, especially if weights are tailorable
by different stakeholders. Consider the following.
Should we assume that a normative framework is uti-
lized to model ADS preferences, then it is highly
likely that a government regulator would desire to
limit the range of objective weights specified in ADS
operations. Responding to this regulation, an ADS
manufacturer is likely to sell its vehicles with recom-
mended baseline weight settings, and it is conceiv-
able that the ADS operator would be empowered to
tailor these to their needs. However, by adapting the
weights, the operator may incur more liability, espe-
cially if the ADS’s algorithms are modified beyond
their legal limits. Indeed, a main advantage of the pro-
posed multi-attribute framework is that it sheds trans-
parency on the decision making process taken during
the design of ADSs. Utilizing this proposal, regu-
lators can undertake in-depth simulations of various
configurations until they arrive at socially acceptable
results. Such configurations can be mandated by law
or recommended as industry standards.
As an example, we illustrate how this framework
can be leveraged for liability concerns. Assume a reg-
ulator has set some safety criteria that must be met by
any ADS system to operate on public infrastructures.
The safety criteria does not distinguish between indi-
viduals inside and outside the vehicle (i.e., both are
equally weighted) and is expressed e.g. as follows:
Mean plus two standard deviations of number of in-
juries and fatalities per X kms should not be greater
than 1.4 and 0.25, respectively. From this criteria, the
regulator wishes to determine a recommended indus-
try standard for the ADS objective weights.
Simulating ADS operations, different values for
the weights of each component of the multi-attribute
utility function can be analyzed, and the regulator can
determine whether they met the criteria. Suppose the
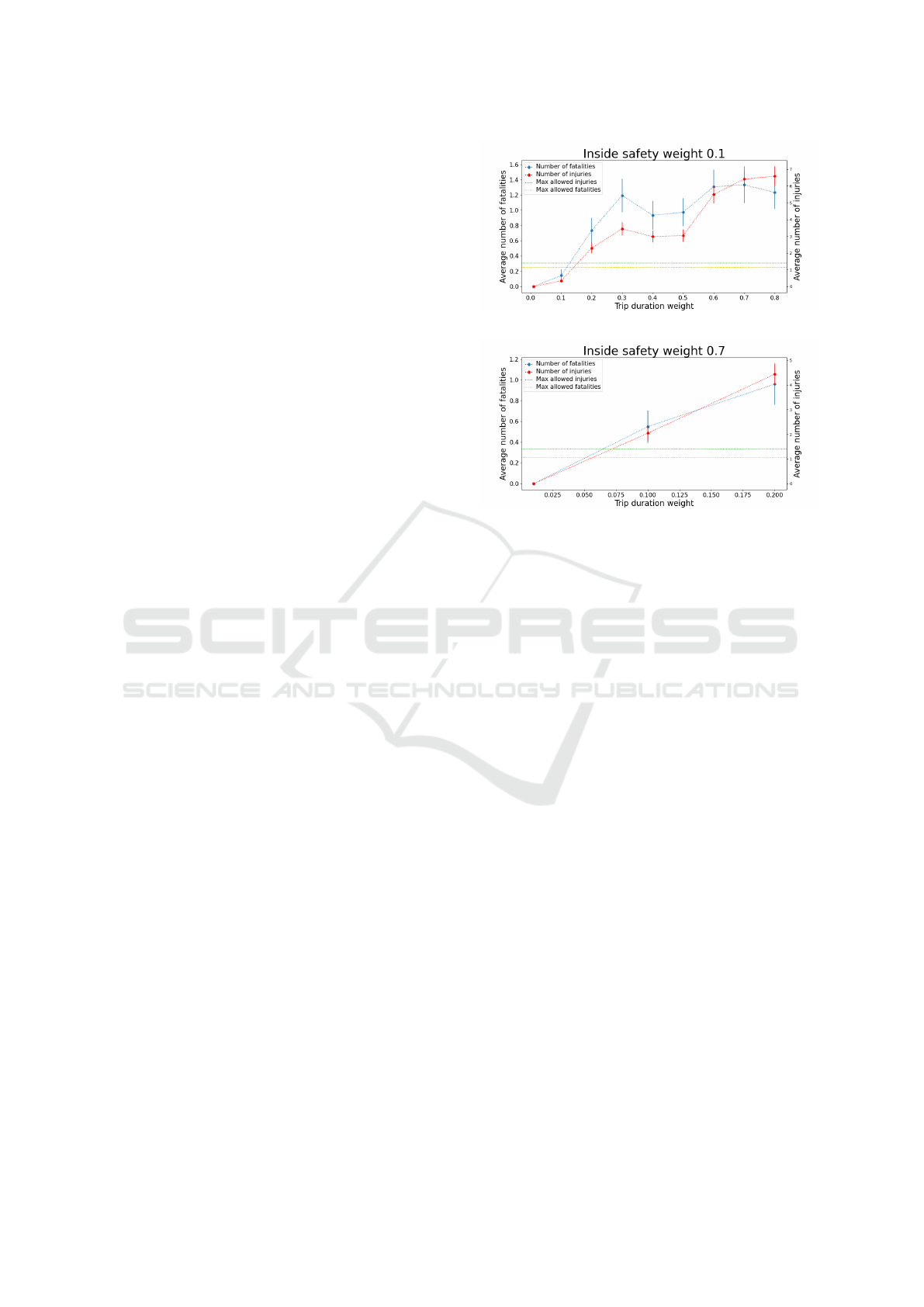
(a) Inside safety weight of 0.1
(b) Inside safety weight of 0.7
Figure 3: Average number of injuries and fatalities vs. trip
duration weight.
chosen objectives from Table 1 are trip duration and
inside and outside safety. Figure 3a shows that if
the inside safety weight is fixed at 0.1, trip duration
weights greater than or equal to 0.2 do not meet the
regulator’s criteria. Trip duration weights below 0.2
could be further explored in order to identify the max-
imum weight fulfilling the safety constraints. In this
particular case, a trip duration weight of 0.1 is admis-
sible.
Having completed their analysis, the regulator sets
this weight combination as a standard (0.1, 0.1, and
0.8). However, an auto manufacturer determines it
can gain market share by allocating more weight
to inside safety while maintaining the trip duration
weight constant, thereby decreasing the outside safety
weight. Concretely, suppose that an inside safety
weight of 0.7 is selected. In this scenario, if an in-
jury or fatality occurs, a natural question would be
whether or not the auto manufacturer is liable. To
make this determination, a simulation of the partic-
ular weight configuration could be undertaken to as-
certain whether the results fall within the prescribed
safety bounds. Figure 3b shows that, in this particular
example, the selected weights do not meet the regula-
tor’s criteria and thus the manufacturer could reason-
ably be deemed liable.
As mentioned, the RtI would be communicated to
the driver through an HMI. Multiple authors have ex-
amined the effect of HMIs on RtIs e.g. (Walch et al.,
2015), (Eriksson and Stanton, 2017). We sketch now
Towards Acceptance of Automated Driving Systems
235
Table 1: General objectives and attributes for ADS management.
Objective
Natural
attribute
Constructed
attribute
Proxy
attribute
Min. fuel consumption Monetary
units
Min. trip duration Temporal
units
Monetary
units
Min. driver/passenger discomfort Yes ADS movement
Min. injuries of individuals inside (outside) ADS Number of
injuries
Yes No. in hospital
Min. fatalities of individuals inside (outside) ADS Number of
fatalities
VSL
Yes
Max. respect for inside (outside) ADS Probability of
death/injury
VSI
Yes
Min. damage to ADS Monetary
units
Min. infrastructure damage Monetary
units
Min. environmental impact (global/local) Monetary
units
Emissions
Min. harm to manufacturer reputation Yes Media salience
Min. harm to societal perceptions Yes Media salience
how we assess HMIs from the Trustonomy perspec-
tive.
4 HUMAN MACHINE
INTERFACES
HMIs are fundamental components of an automated
vehicle design and the main channels of information
between the vehicle and the driver. Since all automa-
tion levels between level -1 and -4 require at least sel-
dom driver interaction, the development of advanced
HMI designs is pivotal for establishing a smooth in-
teraction between the driver and the ADS. In particu-
lar, this is essential in RtI scenarios. The notifications
and information conveyed to the user should be clear
and understandable, and indicative of the occurring
driving situation. Thus, high quality HMIs capable
of generating the appropriate information are of great
importance in automated driving.
Road safety issues and the limited amount of in-
formation conveyed to the driver directed the focus
of automotive industry in developing human-centered
HMI design and assessment approaches. Many guide-
lines regarding HMI quality and assessment crite-
ria have been proposed e.g., (Naujoks et al., 2019),
(Carsten and Martens, 2019). Three fundamen-
tal features are usability, distraction and acceptance
(Franc¸ois et al., 2017). Towards this direction, the
vision of the Trustonomy project is to develop an
HMI assessment framework considering driver per-
formance, trust and acceptance.
The proposed assessment framework consists of
a time-based assessment approach, as well as an in-
novative in silico ergonomics evaluation. Validation
of the framework compels evaluating HMIs in suit-
able automotive environments (real ADS or simula-
tors) by a representative population sample with di-
verse characteristics (e.g., age, gender, driving ex-
perience) to achieve statistical significance. Driver
and vehicle data recorded during interactions between
the participants and the available HMI designs in the
project pilots will be used as input for both frame-
work modules. The time-based module aims to eval-
uate the impact of HMIs on driver performance and
the proposed methodology includes a collection of
subjective and objective measurements. Each trial
starts with an adaptation driving scenario and, at the
end of it, the participant completes a simulation sick-
ness questionnaire. Afterwards, the actual driving
scenario initiates including secondary tasks and RtIs,
signaled by different HMI modalities. During this
time period objective measures are collected such as
the time response to the HMI stimuli. At the end
of the driving scenario, a subjective assessment fol-
lows materialized through comprehension (question-
naire designed based on ISO9186), usability (tailored
questionnaires) and workload (modified NASA-TLX)
SUaaVE 2021 - Special Session on Research Trends to Enhance the Acceptance of Automated Vehicles
236

tests. Moreover, the influence of secondary visual-
manual tasks will be assessed using the surrogate ref-
erence task (SURT).
On the other hand, the ergonomics module of
the HMI assessment framework undertakes a more
technical approach utilizing software tools to inves-
tigate the impact of the driver-HMI interactions on
the driver’s musculoskeletal system. A biomechan-
ical analysis is conducted using the OpenSim soft-
ware and appropriate musculoskeletal models that are
scaled to capture the anthropometric data of differ-
ent population classes. The pipeline requires mo-
tion capture (MoCap) data that are recorded during
the interactions between the driver and the HMI de-
sign. The ergonomics method distinguishes between
static and dynamic posture analysis. The former aims
to assess the installation position of distinct HMI de-
sign elements and the level of discomfort imposed to
the driver by estimating standard ergonomic indices
such as RULA, LUBA and NERPA. The latter evalu-
ates the entire set of interactions through the dynamic
evolution of ergonomics indices such as joint energy
and power, mean joint torque, angular impulse, and
range of motion (Kaklanis et al., 2013) (Risvas et al.,
2020). The results are displayed through heatmaps
and detailed plots and provide means of comparison
between different HMI designs.
The two proposed approaches work separately, yet
in a supplementary way, to provide assessment of the
various physical and cognitive factors that affect the
interactions between the driver and HMI design in
an automotive environment. The overall proposed
framework can be utilized by vehicle manufacturers
to improve their HMI designs. Moreover, the pro-
posed tools can be applied in simulator ADS environ-
ments, thus assisting in development of HMI proto-
types with human-centered high quality standards.
5 TRUST AND ACCEPTANCE
The concept of trust is fundamental to many of our
everyday interactions, and is especially critical when
there is uncertainty or incomplete information (Swan
and Nolan, 1985). The responses that humans demon-
strate towards technology are quite similar in some
respects to responses to other humans (Reeves and
Nass, 1996); we possibly use habits we have already
formed in interpersonal situations. Trust has been
identified as a key factor influencing acceptance and
reliance on ADS, and in particular in determining the
willingness of a human operator to rely on automa-
tion in situations of uncertainty (Lee and See, 2004).
The full safety and economic potential of ADSs will
not be reached if drivers do not accept or use them in
an appropriate way. Hence, understanding what fac-
tors associate with trust in ADSs is important in un-
derstanding and improving human interactions with
them. An individual’s personality, previous experi-
ence and the context in which they are driving are
factors that certainly influence trust in ADSs (Hoff
and Bashir, 2015). In addition, perceived ease of use,
usefulness, safety and privacy risks also mediate trust
(Zhang et al., 2019).
Within Trustonomy, and as a precursor to a driv-
ing simulator study, an online survey was carried out
to explore the “mood music” regarding trust in ADSs.
The general public may have heard media reports of
ADSs being involved in safety-critical incidents. Do
drivers have varying amounts of trust in ADSs as ex-
pressed by proxy measures such as willingness to re-
move their hands and feet from the controls, as well
as engage in tasks which direct their gaze away from
the road scene. And are there any general conclusions
that can be drawn with regards the residents of differ-
ent countries – are some more inclined to trust ADSs
in various situations than others?
Approximately 800 participants (drivers) were re-
cruited to take part in an online survey in the UK,
France, Italy and Poland. As well as ascertain de-
mographics, attitudes to automation and personal-
ity, respondents rated their trust in ADSs in eleven
road environments which varied by road type (ur-
ban/rural/motorway), complexity (links, curves or in-
tersections) and road users (present or absent). Re-
spondents were asked to “Imagine you are in the driv-
ing seat of an ADS and the ADS is in control. Be-
low are a number of driving scenarios and for each,
we would like to know how likely you would be to
take your hands off the steering wheel, rest your feet
away from the pedals, or take your eyes off the road
ahead for longer than you normally do e.g. a couple of
seconds or more.” An 11-point Likert-type scale from
0=Not at All Likely to 10=Extremely Likely was pre-
sented and levels of trust were compared across gen-
der, age, country and road scenario, see Figure 4.
Overall, respondents reported that they would re-
move their hands and feet from the controls of the
vehicle more readily than take their eyes off the road,
with males being more trusting than females. UK cit-
izens were least likely to disengage and Italians the
most likely. France and Poland were similar to each
other. As might be expected, drivers were less likely
to disengage on urban roads, compared to rural and
motorways and also when the road was complex in
design or had other road users present.
With the caveat of this being a self-report survey,
we tentatively suggest there may be between-country
Towards Acceptance of Automated Driving Systems
237

Figure 4: Sample of environments presented in the survey.
differences with regards trust, as gauged by proxy
measures of disengagement. In addition, there may
be (currently justified) reticence in trusting ADSs in
conditions where a human operator is perceived to
be performing an important monitoring and decision-
making role, such as in complex road layouts or
where other road users are present.
6 DISCUSSION
We have introduced some of the concepts that, from
an interdisciplinary perspective, are being developed
within the Trustonomy project to increase acceptance
of ADS. A framework to support ethical decisions
concerning RtIs was sketched; the entailed decisions
need to be properly communicated through appropri-
ate HMIs, demanding adequate assessment; these, in
turn, should increase trust and acceptance in ADS,
favouring their adoption and their entailed benefits.
ACKNOWLEDGEMENTS
Work performed in the context of the Trustonomy
project, which has received funding from the Euro-
pean Community’s Horizon 2020 research and inno-
vation programme under grant agreement No 815003.
REFERENCES
Awad, E., Dsouza, S., Kim, R., Schulz, J., Henrich, J.,
Shariff, A., Bonnefon, Jean-Franc¸ois, R., and Iyad
(2018). The moral machine experiment. Nature,
563(7729):59–64.
Burns, L. and Shulgan, C. (2019). Autonomy: The Quest to
Build the Driverless Car—And How It Will Reshape
Our World. ECCO.
Caballero, W. N., Insua, D. R., and Naveiro, R. (2021a).
Ethical and operational preferences automated driving
systems. Tech. Rep.
Caballero, W. N., Rios Insua, D., and Banks, D. (2021b).
Decision support issues in automated driving systems.
Int. Trans. Oper. Res.
Carsten, O. and Martens, M. (2019). How can humans un-
derstand their automated cars? hmi principles, prob-
lems and solutions. Cognition, Technology & Work,
21.
Eriksson, A. and Stanton, N. A. (2017). Takeover time in
highly automated vehicles: noncritical transitions to
and from manual control. Human factors, 59(4):689–
705.
Franc¸ois, M., Osiurak, F., Fort, A., Crave, P., and Navarro,
J. (2017). Automotive hmi design and participa-
tory user involvement: review and perspectives. Er-
gonomics, 60(4):541–552. PMID: 27167154.
French, S. and Insua, D. R. (2000). Statistical Decision
Theory. Edward Arnold.
Hoff, K. A. and Bashir, M. (2015). Trust in automation: In-
tegrating empirical evidence on factors that influence
trust. Human Factors, 57(3):407–434.
Insua, D. R., Caballero, W. N., and Naveiro, R. (2021).
Managing driving modes in automated driving sys-
tems. arXiv preprint arXiv:2107.00280.
Kaklanis, N., Moschonas, P., Moustakas, K., and Tzovaras,
D. (2013). Virtual user models for the elderly and dis-
abled for automatic simulated accessibility and ergon-
omy evaluation of designs. Universal Access in the
Information Society, 12.
Keeney, R. L. (1984). Ethics, decision analysis, and public
risk. Risk Analysis, 4(2):117–129.
Keeney, R. L., Raiffa, H., and Meyer, R. F. (1993). Deci-
sions with multiple objectives: preferences and value
trade-offs. Cambridge university press.
Lee, J. and See, K. (2004). Trust in automation: Designing
for appropriate reliance. Human Factors, 46(1):50–
80.
Mahmassani, H. S. (2016). 50th anniversary invited arti-
cle—autonomous vehicles and connected vehicle sys-
tems: Flow and operations considerations. Trans-
portation Science, 50(4):1140–1162.
Naujoks, F., Wiedemann, K., Sch
¨
omig, N., Hergeth, S., and
Keinath, A. (2019). Towards guidelines and verifi-
cation methods for automated vehicle hmis. Trans-
portation Research Part F: Traffic Psychology and Be-
haviour, 60:121–136.
Reeves, B. and Nass, C. (1996). The media equation: How
people treat computers, television, and new media like
real people. Cambridge University Press.
Risvas, K., Pavlou, M., Zacharaki, E., and Moustakas, K.
(2020). Biophysics-based simulation of virtual human
model interactions in 3d virtual scenes. 2020 IEEE
Conference on Virtual Reality and 3D User Interfaces
Abstracts and Workshops (VRW), pages 119–124.
Swan, J. E. and Nolan, J. J. (1985). Gaining customer trust:
a conceptual guide for the salesperson. Journal of Per-
sonal Selling Sales Management, 5(2):39–48.
SUaaVE 2021 - Special Session on Research Trends to Enhance the Acceptance of Automated Vehicles
238

Walch, M., Lange, K., Baumann, M., and Weber, M. (2015).
Autonomous driving: investigating the feasibility of
car-driver handover assistance. In Proceedings of the
7th international conference on automotive user in-
terfaces and interactive vehicular applications, pages
11–18.
West, M. and Harrison, J. (2006). Bayesian forecasting and
Dynamic Models. Springer.
Zhang, T., Tao, D., Qu, X., Zhang, X., Lin, R., and Zhang,
W. (2019). The roles of initial trust and perceived risk
in public’s acceptance of automated vehicles. Trans-
portation Research Part C, 98:207–220.
Towards Acceptance of Automated Driving Systems
239
