
Acceptability and Acceptance of Connected Automated Vehicles: A
Literature Review and Focus Groups
Jorick M. M. Post
1a
, Janna L. Veldstra
1b
and A. Berfu Ünal
1,2 c
1
Faculty of Behavioural and Social Sciences, Rijksuniversiteit Groningen, Groningen, The Netherlands
2
Faculty of Campus Fryslan, Rijksuniversiteit Groningen, Groningen, The Netherlands
Keywords: Connected Automated Vehicles, Autonomous Driving, Acceptance, Acceptability.
Abstract: A lot of resources and manpower are being allocated to develop Connected Automated Vehicles (CAV). CAV
are Automated Vehicles (AV) with vehicle connectivity abilities to further increase road safety and user
convenience. For a successful implementation of CAV, the psychological factors that predict its acceptance
have to be researched. The present paper provides a literature review of the individual differences and
perceived characteristics that could influence CAV's acceptance. Additionally, we report the results of several
focus groups that were held in 4 European countries to highlight additional factors not reported in the literature
yet.
1 INTRODUCTION
In the near future Connected Automated Vehicles
(CAV) will be introduced to public roads. CAV are
fully self-driving vehicles, which can share data with
other vehicles and transportation systems. The
traditional driver will take the role of a passenger in
CAV. Major players in the automotive industry have
already invested in designing vehicles with full
automation, and many have started pilot testing these
vehicles in designated test areas (SAE International,
2018).
At present, Automated Vehicles (AV) already
exist and are allowed on public roads in some
countries. However, AV sensing technologies are
currently limited, and unreliable under extreme
weather or road conditions (He et al., 2019). To
illustrate, at least three Tesla drivers have died in
crashes in which autopilot failed to detect obstacles
on the road since 2016 (Boudette, 2021), with
several crashes still under investigation. CAV
improves upon existing AV by including vehicle
connectivity abilities to communicate with other
vehicles and transportation networks, enhancing the
situational awareness. For example, they can share
the vehicles speed, heading, and brake status to
a
https://orcid.org/0000-0001-9048-1423
b
https://orcid.org/0000-0002-1604-5321
c
https://orcid.org/0000-0002-0221-0656
increase road safety (Eskandarian, Wu, & Sun,
2019). Moreover, they could help in improving
traffic flow and plan the most efficient road,
enhancing the vehicle’s convenience. Lastly, more
efficient driving and CAV’s ability to platoon may
reduce traffic CO
2
emissions, potentially making it
more environmentally friendly than AV or
traditional cars.
A lot of resources and manpower are being
allocated to realize the goal of connected fully
automated vehicles. However, whether these efforts
will be successful depends on whether the public
would accept and adopt CAV. The addition of
vehicle connectivity may lead to improved safety
and convenience over AV, but could also increase
the public’s concerns about for example data sharing
and possible hacking of the vehicle. In this paper we
explore which psychological factors are important
for the acceptability and acceptance of CAV. We
first conducted a literature review to answer this
question. Additionally, we held several focus groups
to discover other factors that could influence the
acceptance of CAV that are missing or lacked
attention in the literature.
Post, J., Veldstra, J. and Ünal, A.
Acceptability and Acceptance of Connected Automated Vehicles: A Literature Review and Focus Groups.
DOI: 10.5220/0010719200003060
In Proceedings of the 5th International Conference on Computer-Human Interaction Research and Applications (CHIRA 2021), pages 223-231
ISBN: 978-989-758-538-8; ISSN: 2184-3244
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
223

2 LITERATURE REVIEW
In the literature acceptability and acceptance are
sometimes used interchangeably. However, in this
paper we disentangle the two constructs and reason,
in line with Schade & Schlag (2003), that
acceptability refers to one’s attitudes and evaluations
before one has experienced CAV, whereas
acceptance refers to one’s attitudes, evaluations, and
behaviour after having experienced CAV.
Acceptability could be expressed as an attitudinal
evaluation or intention (e.g. the willingness to ride
CAV), while acceptance could both be expressed as
an attitude, as well as actual behaviour (e.g.
purchasing CAV). As those people that have had
experience with CAV mostly had those experiences
in an experimental setting and not in real-life, the
present literature review will cover acceptability and
not acceptance in the majority of the reviewed
studies.
Few studies have researched the acceptance of
fully automated vehicles (e.g. Kyriakidis et al., 2015;
Distler et al., 2018). Previous studies have mainly
focused on Advanced Driver Assistance Systems
(ADAS), partially automated vehicles, public
exposure to automated vehicles in the media such as
Google car and Tesla, or slow-driving automated
public transport shuttles. As such, we will extrapolate
results from these studies to CAV.
2.1 Individual Differences
Innate demographic differences have often been
analysed in an attempt to see whether they affect the
acceptability of automated vehicles (AVs; e.g.
Howard & Dai, 2014; Becker & Axhausen, 2017).
Individual differences may be interesting to examine
to be able to tailor CAV to specific needs of different
user groups. However, previous research has shown
that effects of individual differences on acceptability
of CAV are often small, and sometimes contradictory
(e.g. Becker & Axhausen, 2017 and Rödel et al.,
2014).
2.1.1 Gender and Age
Most studies included gender and age in their
analyses and examined whether innate demographic
differences exist in acceptance of AV. Some gender
differences surfaced. In general male drivers are
reported to be less concerned to be a passenger in a
fully automated vehicle than women (Schoettle &
Sivak, 2014; Becker & Axhausen, 2017). Howard &
Dai (2014), for example, reported that women and
men differed in the concerns they have with regard to
being a passenger in a fully automated AV. Women
were more concerned with low control over the
vehicle, while men were more concerned with
potential liability issues. Differences between men
and women in willingness to use an automated
vehicle could be partially explained by emotions that
they assign to automated driving. Women tend to
assign more negative emotions to automated driving,
and anticipate both less pleasure and more anxiety
than men (Hohenberger, Spörrle, & Welpe, 2016).
Comparisons between age groups are less
equivocal in the literature. Some studies reported that
young people were more positive about automated
vehicles than older drivers (Becker & Axhausen,
2017), while other studies report that older people
were more interested in using an automated vehicle
than younger people (Rödel et al., 2014). Gold et al.
(2015) reported that older people tend to rate the
potential safety gains of automated driving higher
than younger people. Likewise, Regan at al. (2017)
reported that younger people have a higher level of
trust in CAV than older people, but they also have
higher levels of concerns about their performance
than older people have. Ease of technology use may
be a moderating factor in the relationship between age
and willingness to use CAV. For example, Schaefer
et al. (2014) reported that higher self-reported ease of
technology use among older people had positive
effects on willingness to use AVs, and expected
benefits from using AVs. Additionally, Souders &
Charness (2016) found that reduced concerns related
to AVs had positive effects on willingness to use
them. As such, instead of focusing on differences in
acceptance based on age, it may be better to focus on
the ease of technology use.
2.1.2 Experience with Technology
Having no experience with an innovation can trigger
a negative response to it, especially among people
who are not open to new technology. On the other
hand, having positive experiences with an innovation
can increase willingness to use it. To illustrate, in a
simulation study conducted by Gold et al. (2015), the
researchers found that perceived trust and intention to
use an AV increased after exposure to it (Gold et al.,
2015). This means that even a simulated experience
with the technology can benefit the relationship to it.
In another study initial perceptions of highly
automated vehicles were assessed, followed by letting
participants experience the AV in a driving simulator,
and finally letting them experience it on a test track.
Acceptance, trust, satisfaction, and perceived
SUaaVE 2021 - Special Session on Research Trends to Enhance the Acceptance of Automated Vehicles
224

usefulness of the AV increased significantly after
experiencing the driving simulator compared to the
initial attitudes (Hartwich et al., 2018). Moreover,
these positive ratings remained stable over time after
they had experienced the AV on a test track. Also, Qu
et al. (2019) reported that self-reported familiarity
with AVs is positively correlated with the expected
benefits of AVs, and negatively correlated with
concerns. These studies indicate that experience with
the technology, even in a simulator, can significantly
increase the acceptance of CAV.
However, direct experience with CAV may not be
necessary to increase acceptability. Positive
experiences with automated features in cars, such as
automatic lane keeping, automated parking, or
adaptive cruise control may enhance willingness to
make the step to fully automated driving. Indeed,
Sener, Zmud, & Williams (2019) found that intention
to use AVs was higher among people who had
experience with automated features in cars than
people who did not have experience with features like
this. These results indicate that having people
experience driving with some automated functions
could increase the acceptability of CAV and in turn
acceptance.
2.1.3 Motives
Aside from previous experience with technology,
examining people’s motives for using cars could
prove useful in determining which factors are
important for acceptance of CAV. Most people will
come up with all kinds of practical arguments when
asked why they drive a car. Innovators generally also
stress these commonly named instrumental
advantages of AVs to promote their use. However,
research into motives for private car use has shown
that a car is much more for people than just a means
of transportation (Steg, 2005). Aside from
instrumental motives, symbolic and affective motives
influence current private car use (Gatersleben, 2007;
Steg, 2005). Symbolic motives for private car use
include being able to express one’s high status or
identity by driving an expensive or luxurious car.
Affective motives for car use include the joy of
driving and seeing driving itself as a positive and
enjoyable activity.
Although to date no research has extrapolated the
motives for traditional private car use to intentions for
the use of CAV, these findings have been replicated
in the purchase intention of electric vehicles (Noppers
et al., 2014). Participants indicated that instrumental
aspects of electric vehicles were the most important
for their purchasing intention, but purchasing
intentions were actually better predicted by the
evaluation of the symbolic aspects of the vehicle.
More specifically, the purchase intention of an
electric vehicle was mostly associated with gaining
status. Especially the early adoption of new mobility
choices may be driven by the association of high
status (Egbue & Long, 2012). Extrapolating these
findings to the intention to use CAV, CAV may
benefit from being presented as a luxurious product at
its launch to enhance acceptance.
2.2 Perceived Characteristics
Several models that aim to explain acceptance of
technology or innovations include system and design
features as predictors of acceptance (e.g. the
Technology Acceptance Model; Davis, 1993),
indicating that perceived characteristics of CAV may
play a major role in its acceptance. We will, therefor,
discuss the perceived characteristics of CAV that are
mentioned the most often in the literature relating to
acceptance below, namely perceived safety, pleasure,
convenience, comfort, trust, and control.
2.2.1 Perceived Safety
A lot of individual variation exists when it comes to
perceptions regarding the safety of automated
vehicles. For instance, while some people associate
full automation with high safety (Brell et al., 2019),
others associate it with low safety (Zmud et al., 2016).
A large-scale survey by Schoettle & Sivak (2014)
with over 1500 participants revealed that a large
portion of the respondents believed that fewer
accidents will happen in the future thanks to
automated vehicles, indicating they expected a high
safety increase.
It seems people immediately think of safety when
discussing AVs. In one questionnaire, more than half
of the participants chose ‘highest possible level of
safety’ as their greatest priority for automated cars
(Lustgarten & Le Vine, 2018). The greatest concerns
regarding the safety of automated driving people
seem to have are about equipment failure, vehicle
performance in unexpected situations, software
hacking, and data misuse (Kryriakidis et al., 2015;
Schoettle & Sivak, 2014). In short, people expect both
safety gains, but are concerned about safety as well.
Additionally, Zoellick et al. (2019) reported that
perceived safety correlated strongly with acceptance
and was a solid predictor of intention to use
automated vehicles in a study where potential users
experienced a vehicle with high automation on the
road. This indicates perceived safety may be a
Acceptability and Acceptance of Connected Automated Vehicles: A Literature Review and Focus Groups
225

predictor of both acceptance of and intention to use
CAV. In a different study it was found that the more
driving experience respondents had, the more often
they drove, and subsequently the more likely they had
been involved in a conventional car-based crash,
which made them view automated vehicles as a safer
alternative (Montoro et al., 2019).
2.2.2 Perceived Pleasure
As said above, a significant percentage of drivers do
not view driving as just a means of transportation, but
enjoy the driving in itself, feeling it is thrilling,
pleasurable, and adventurous (Steg, 2005). Driving in
CAV could pose a threat to driving pleasure, in
particular for those who associate driving with fun as
it takes away the driving task of the driver. In turn this
could affect the acceptability and acceptance of CAV.
Indeed, Rödel et al. (2014) reported that the expected
fun of driving was lower for higher automation,
compared to lower automation. Intention to use these
vehicles was also lower for higher automation levels.
Certain aspects of driving in CAV could also
increase driving pleasure, though. For example,
engaging in manoeuvres that are seen as difficult,
such as reverse parking, could decrease the driving
pleasure of a traditional car. When driving in CAV
there is no need to deal with such hassles. In support
of this reasoning, Bjørner (2017) found that people
expect the highest pleasure with AVs in situations of
parallel parking or in a traffic jam. In short,
perceptions of pleasure regarding being a passenger
in CAV could both be positive or negative. Future
research needs to investigate if and how these
perceptions influence the acceptability and
acceptance of CAV.
2.2.3 Perceived Convenience and Comfort
Convenience appears to be an important factor
associated with fully automated driving (Howard &
Dai, 2014). The possibility of being able to work,
socialise, or relax despite being stuck in a traffic jam
is very appealing to some. Some benefits potential
users imagine are (1) the ability to multitask, such as
reading or working while travelling, (2) extended
comfort (e.g. the ability to adjust the seat to a relaxing
position; integrated multimedia applications)
compared to a traditional vehicle (Pfleging et al.,
2016), and (3) enhancing the mobility of those
currently unable to drive or in situations in which
driving manually is undesirable, such as after
drinking or when one is fatigued (Jeon et al., 2018).
In fact, in a study examining the prioritization of
benefits of AVs, more than half of the respondents
expressed willingness to pay more, as well as a
willingness to accept slower travel in exchange for
greater comfort while travelling in an AV (Lustgarten
& Le Vine, 2018). Perceived convenience has been
linked to acceptance of both partially automated
vehicles and fully automated vehicles (Lee et al.,
2018).
The level of automation seems to affect perceived
convenience, though. Potential users believe fully
autonomous driving would be easier for them than
manual driving, while partially autonomous driving is
seen as more difficult (Kyriakidis et al., 2015). The
higher the level of automation, the more potential
users would intend to rest, watch movies, or read
while travelling.
2.2.4 Perceived Trust
In an international survey almost half of the
respondents indicated that trust is the biggest barrier
for accepting AVs (Jeon et al., 2018). Perceived trust
can be defined as the belief that CAV will function as
intended and without posing any danger to its
passengers as well as to other road users. When one
does not believe CAV will function as intended, one
has low trust in CAV. Low trust may even lead to
physiological responses among users. For example, in
a simulation study participants with less trust in AVs
experienced an additional increase in
psychophysiological stress when the vehicle drove
autonomously, compared to when the participant was
in control of the vehicle (Morris et al., 2017). As such,
enhancing trust in CAV should be a priority to
enhance acceptance. Two factors may influence trust:
previous experiences, and system transparency.
To start with the first factor, a simulation
experiment with partially automated vehicles found
that positive experiences enhanced trust in the
vehicle, while negative experiences (such as a crash)
decreased trust (Gold et al., 2015). Likewise, false
alarms and errors might decrease trust in automated
systems (Schaefer et al., 2016). Possibly, as CAV
takes over all driving tasks, users may attribute the
negative experiences such as crashes to CAV’s
computer system, while in a traditional car they may
attribute a crash to other road users’ behaviour or their
own driving. The attribution of blame in case of
crashes or errors with CAV still needs further
research. It will be crucial to build CAV so that it can
operate as error-free as possible, as people will be less
forgiving of a machine than a human (Zhang et al.,
2021).
Secondly, system transparency (the degree to
which users can predict and understand the operating
SUaaVE 2021 - Special Session on Research Trends to Enhance the Acceptance of Automated Vehicles
226
of the vehicle), as well as the perception of the
vehicle’s performance have been found to have
positive effects on trust in AVs in a survey applying
the Technology Acceptance Model to AVs (Choi &
Ji, 2015). Moreover, greater trust is associated with a
greater intention to use AVs. Perhaps explaining
clearly and in an easy-to-understand manner how
CAV functions could improve its acceptance.
2.2.5 Perceived Control
Another potential barrier towards the acceptance of
CAV is the feeling of low control associated with
fully automated driving. The higher the automation
level of a vehicle, the less likely people are to prefer
that vehicle over a vehicle with lower automation
(Schoettle & Sivak, 2016). The majority of the
current drivers indicate that they still would like to
have some control over the pedals and the steering
wheel. Current drivers would like AVs to have the
option to be able to drive manually whenever they
desire to do so (Liljamo et al., 2018). Lack of control
is rated as the least attractive feature of fully
automated driving (Howard & Dai, 2014). Full
automation could pose a threat to the basic need of
feelings of control, especially for those who enjoy
car-use and value their car as a luxury possession.
On the other hand, when people believe that
CAVs are capable to drive safely by having external
control of the road situation at all times, they are also
more likely to be accepting of CAV. For example,
Dixon et al. (2020) reported that the more people
perceived that an AV itself had control over and could
avoid possible hazardous situations, the more they
supported AVs. However, where these beliefs stem
from is not clear. It could be that those who already
have positive experiences with automation assign
more external control to the car. For instance, drivers
who already use adaptive cruise control indicate to be
more comfortable about driving without a steering
wheel than those who do not currently use adaptive
cruise control (Kyriakidis et al., 2015). In short,
perceived control does appear to play a role in the
acceptance of CAV, but what the antecedents of
perceived control of CAV are remains unclear.
3 FOCUS GROUPS
The literature review highlighted some important
psychological factors that could influence the
acceptability of CAV. The aim of the focus groups
was to assess if other psychological factors could play
a role in the acceptability of CAV that were not found
or received little attention in the literature. To this end
we conducted a total of 8 focus groups in Spain, Italy,
France, and the Netherlands. They took place from
late 2019 to early 2020.
3.1 Sample
In each country the focus group(s) targeted middle
aged drivers (aged 31-55). Additionally, the focus
groups were held to target specific groups: (1)
cyclists, (2) pedestrians, (3) anxious drivers / low
frequency drivers, (4) high frequency drivers, (5)
older drivers (aged 56-75), (6) younger drivers (aged
18-30), and (7) persons with physical disabilities.
The total sample consisted of 70 participants, with
a mean age of 40.8. The majority was male (61.4%),
and held a university degree (47.1%). For an
overview of the total sample per category, please refer
to Table 1 below. Please note some participants may
fall into multiple categories.
Table 1: Sample overview focus groups.
Participant type N
Young drivers (18-30) 21
Middle aged drivers (31-55) 32
Older drivers
(
56-75
)
17
Low fre
q
uenc
y
drivers 26
Hi
g
h fre
q
uenc
y
drivers 32
Vulnerable road users (pedestrians, cyclists,
and
p
ersons with a disabilit
y)
21
3.2 Procedure
A script and questionnaires were prepared beforehand
in English, and then translated to Spanish, Italian,
French, and Dutch by native speakers. The focus
groups followed the method of Focus Group based on
Collective Questionnaire Sessions developed by
Bellet et al. (2018), allowing for both qualitative and
quantitative data collection.
Participants were first given an information form,
which detailed the aims of the study and what was
expected of them, as well as an informed consent
form. After signing the informed consent form,
participants completed a short questionnaire about
demographics, driving behaviour, and interest in
technology individually. After everyone completed
the questionnaire, participants introduced themselves
and were asked what comes to mind when thinking
about CAV. They were then shown a short videoclip
(3 minutes) that showed what driving in CAV is like
and received a textual description of CAV. After this,
participants individually filled out short questionnaires
on various topics, alternated with rounds of discussion.
Acceptability and Acceptance of Connected Automated Vehicles: A Literature Review and Focus Groups
227
The topics discussed were: (1) acceptability, (2) safety,
risk, and trust, (3) convenience, pleasure, and comfort,
(4) perceived benefits and costs, and motives, and (5)
ethical and legal issues.
Qualitative results were obtained from the
recorded discussions, as well as any comments
participants left on the individual questionnaires after
each section. The group discussions were led by the
test leaders, who had received the script and several
discussion topics beforehand.
The focus group for the Dutch participants was
held online instead, due to the COVID-19 lockdown
in 2020. Dutch participants completed the same
questionnaires online, and discussion rounds were
omitted for this group.
3.3 Collective Questionnaire Sessions
We will discuss the outcome of the focus group
sessions for each separate section.
3.3.1 Acceptability and Demographics
Acceptability of CAV was assessed at three points:
(1) before participants watched the movie and read
the description of CAV, (2) right after watching the
movie and reading the description, and (3) after the
group discussion about acceptability.
We took the mean of all these measurement points
to assess their acceptability. We compared
acceptability based on participants’ gender, age group,
driving frequency, and interest in technology. To
compare low and high frequency drivers, we created
two subgroups in which low frequency drivers scored
below the average on driving frequency, while high
frequency drivers scored above the average. Likewise,
we created two subgroups for high and low interest in
technology, based on whether participants scored
above or below the average on interest in technology.
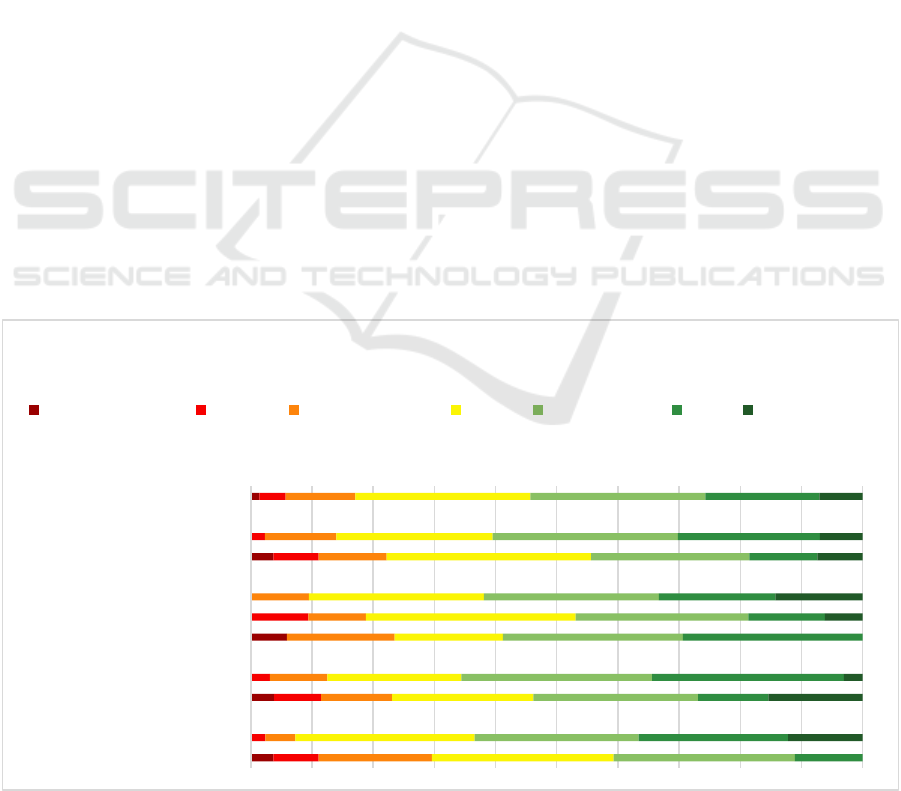
Overall, more than half of all participants viewed
CAV at least slightly positively. Men, younger and
older drivers, high frequency drivers, and those with a
high interest in technology were slightly more positive
than women, middle-aged drivers, low frequency
drivers, and those with low interest in technology.
Please refer to Figure 1 below for an overview.
3.3.2 Perceived Benefits and Costs, and
Motives
The two largest benefits participants expected from
CAV were reducing the traffic CO
2
emissions (70%
of participants), and reducing traffic congestion (65%
of participants). Only around half of the participants
thought CAV will facilitate their mobility, and around
60% of participants believed the introduction of CAV
could reduce car insurance rates.
3.3.3 Ethical and Legal Issues
Participants were separately asked who (the owner or
the manufacturer) would be morally and legally
responsible in case of an accident with CAV. Most
participants agreed that the manufacturer was morally
Figure 1: Acceptability of CAV in the focus groups.
0 102030405060708090100
Full sample
Men
Women
Ages 20-30
Ages 31-55
Ages 56-75
High driving frequency
Low driving frequency
High interest in technology
Low interest in technology
Acceptability of CAV
Strongly Disagree Disagree Slightly Disagree Neutral Slightly Agree Agree Strongly Agree
SUaaVE 2021 - Special Session on Research Trends to Enhance the Acceptance of Automated Vehicles
228

responsible (70% of participants), compared to the
owner (25% of participants). They also agreed that
the manufacturer would be legally responsible (70%
of participants), compared to the owner (25% of
participants). They were also asked who CAV should
protect in case of an accident. These questions proved
difficult, as participants agreed that CAV should both
protect the passengers at all costs (55% of
participants), as well as protect the other road users at
all costs (60% of participants).
Lastly, participants were asked some questions
about how the introduction of CAV could lead to
various changes. The majority of the participants
thought CAV cannot coexist with traditional vehicles
on public roads (55% of participants), and that both
the infrastructure has to change for CAV (70% of
participants), as well as that new legislation is needed
(70% of participants). Many participants were
worried that their privacy would not be protected in
CAV (55%). Finally, although CAV would be fully
automated, participants still thought a driving license
will be required to use it (60% of participants).
3.4 Focus Group Discussions
The greatest concerns participants had, as well as the
most intensely discussed topics will be reported
below.
There was no consensus on the safety of CAV.
Some participants believed CAV would be safer than
traditional vehicles under all conditions and will be
capable of detecting objects and other road users
sooner than a human could see them. After all, CAV
is never distracted or fatigued like a human driver.
Others were overconfident in their own driving skills.
For example, one participant commented that they
could see a pedestrian earlier than a sensor could
detect them. Some thought a human could react better
in uncommon situations, while CAV would drive
better in common situations. In common situations,
CAV's behaviour will always be similar and thus
CAV would be more predictable than a human driver.
This could help make other road users feel safe. This
indicates the predictability of CAV’s behaviour may
play a role in the perceived safety of CAV, as well as
in its acceptance.
Many other road users (cyclists and pedestrians)
wished to know which vehicle is driving
autonomously and which is driven manually. They
suggested a sticker or logo could be used for this.
Some participants indicated they want to receive
some sort of signal when CAV has detected them as
pedestrian or cyclist. Other participants disliked the
idea of being unable to communicate with the driver,
leading to feelings of unsafety. It seems some form of
communication between other road users and the
vehicle will be necessary to make CAV acceptable for
other road users.
Some drivers wanted to retain the option to drive
manually, even if the vehicle could drive
autonomously. Others pointed out a driving license
will be required if this option remains. This would
mean CAV cannot facilitate the mobility of those
currently unable to obtain a driving license. Others
also indicated to like the idea of CAV in cases they
normally would be unable to drive, such as when they
are fatigued or have been drinking. The discussion
showed a divide between current drivers who need
some degree of control over the vehicle for CAV to
be acceptable, while current non-drivers wanted CAV
to be as accessible as possible to enhance their
mobility. Drivers and current non-drivers may have
different requirements of CAV, potentially causing
differences in their acceptance of CAV.
In terms of legal issues, most participants thought
legislation has to drastically change to ensure legal
liability is clear. Without a clear legal framework,
CAV would not be acceptable. A few participants
suggested legal liability of the vehicle owner could
depend on maintenance. The owner would be legally
responsible if the vehicle was poorly maintained;
otherwise the manufacturer would be responsible.
One potential issue of CAV is the sharing of data.
Most participants believed that as long private data is
not shared, it will not be problematic. Only data
needed for the algorithms and anonymous data should
be shared. If privacy cannot be guaranteed, CAV may
not be acceptable to several participants.
In terms of environmental sustainability of CAV,
most participants did not know CAV may be able to
reduce CO
2
traffic emissions by platooning or by
reducing traffic jams through more efficient driving.
Electric cars would be more environmentally
friendly, they thought. Some feared an increase in
mobility will increase traffic and congestion, which
will in turn increase traffic CO
2
emissions. Several
participants suggested making all CAV electric. This
indicates that the perceived environmental
sustainability of CAV could influence its acceptance.
4 CONCLUSIONS
In the present paper we provide a literature review on
psychological factors that could influence CAV’s
acceptability and acceptance. Additionally, we
conducted several focus groups to uncover other
factors that could play a role in CAV’s acceptance
Acceptability and Acceptance of Connected Automated Vehicles: A Literature Review and Focus Groups
229

that were not mentioned or received little attention in
the literature.
In the literature review we found that individual
differences may play a role in the acceptability and
acceptance of CAV. Gender and age may have
limited effects, while experience with the technology
may be a more reliable predictor. Perceived
characteristics of CAV may be the most important
predictors of acceptance. We discussed perceived
safety, pleasure, convenience, comfort, trust, and
control as being particularly relevant.
The focus groups showed that the predictability of
CAV’s behaviour, perceived environmental
sustainability of CAV, existence of a clear legal
framework of liability, and capability of
communicating with other road users may be
additional factors that could influence CAV’s
acceptance. We also found that drivers and non-
drivers may have different requirements for CAV,
which could lead to differences in their acceptance
levels. The finding also points out that marketing
strategies should target different factors based on user
group characteristics and needs.
Future research should determine whether factors
influencing acceptance of AV can be extrapolated to
CAV. Additionally, what drives different perceptions
of CAV (for example whether one believes CAV is
safe or not) is currently unclear. If these questions
could be answered, we would have a better grasp on
what is needed to enhance CAV’s acceptance to
facilitate its implementation.
ACKNOWLEDGEMENTS
This project has received funding from the European
Union’s Horizon 2020 research and innovation
programme under grant agreement No. 814999. The
content of this publication is the sole responsibility of
the authors, and in no way represents the view of
CINEA or European Commission.
REFERENCES
Becker, F., & Axhausen, K. W. (2017). Literature review
on surveys investigating the acceptance of automated
vehicles. Transportation, 44(6), 1293-1306.
Bellet, T., Paris, J. C., & Marin-Lamellet, C. (2018).
Difficulties experienced by older drivers during their
regular driving and their expectations towards
Advanced Driving Aids Systems and vehicle
automation. Transportation Research Part F: Traffic
Psychology and Behaviour, 52, 138-163.
Bjørner, T. (2017). Driving pleasure and perceptions of the
transition from no automation to full self-driving
automation. Applied Mobilities, 4(3), 1-16.
Boudette, N.E. (2021, July 5). Tesla Says Autopilot Makes
Its Cars Safer. Crash Victims Say It Kills. Retrieved
July 19, 2021, from https://www.nytimes.com/2021/
07/05/business/tesla-autopilot-lawsuits-safety.html
Brell, T., Philipsen, R., & Ziefle, M. (2019). sCARy! Risk
perceptions in autonomous driving: The influence of
experience on perceived benefits and barriers. Risk
Analysis, 39(2), 342-357.
Choi, J. K., & Ji, Y. G. (2015). Investigating the importance
of trust on adopting autonomous vehicle. International
Journal of Human-Computer Interaction, 31(10), 692-
702.
Davis, F. D. (1993). User acceptance of information
technology: System characteristics, user perceptions
and behavioral impacts. International Journal of Man-
Machine Studies, 38(3), 475-487.
Distler, V., Lallemand, C., & Bellet, T. (2018).
Acceptability and acceptance of autonomous mobility
on demand: The impact of an immersive experience. In
Proceedings of the 2018 CHI Conference on Human
Factors in Computer Systems (pp. 1-10). ACM, New
York, USA.
Dixon, G., Hart, P. S., Clarke, C., O’Donnell, N. H., &
Hmielowski, J. (2020). What drives support for self-
driving car technology in the United States?. Journal of
Risk Research, 23(3), 275-287.
Egbue, O., & Long, S. (2012). Barriers to widespread
adoption of electric vehicles: An analysis of consumer
attitudes and perceptions. Energy Policy, 48, 717-729.
Eskandarian, A., Wu, C., & Sun, C. (2019). Research
advances and challenges of autonomous and connected
ground vehicles. IEEE Transactions on Intelligent
Transportation Systems, 22(2), 683-711.
Gatersleben, B. (2007). Affective and symbolic aspects of
car use. In Threats from car traffic to the quality of
urban life: Problems, causes and solutions (pp. 219-
233). Emerald Group Publishing Limited, United
Kingdom.
Gold, C., Körber, M., Hohenberger, C., Lechner, D., &
Bengler, K. (2015). Trust in automation – Before and
after the experience of take-over scenarios in a highly
automated vehicle. Procedia Manufacturing
, 3, 3025-
3032.
Hartwich, F., Witzlack, C., Beggiato, M., & Krems, J. F.
(2018). The first impression counts; A combined
driving simulator and test track study on the
development of trust and acceptance of highly
automated driving. Transportation Research Part F:
Traffic Psychology and Behaviour, 65, 522-535.
He, J., Tang, Z., Fu, X., Leng, S., Wu, F., Huang, K., … &
Xiong, Z. (2019). Cooperative connected autonomous
vehicles (CAV): Research, applications and challenges.
In 2019 IEEE 27
th
International Conference on
Network Protocols (ICNP) (pp. 1-6). IEEE.
Hohenberger, C., Spörrle, M., & Welpe, I. M. (2016). How
and why do men and women differ in their willingness
to use automated cars? The influence of emotions
SUaaVE 2021 - Special Session on Research Trends to Enhance the Acceptance of Automated Vehicles
230

across different age groups. Transportation Research
Part A: Policy and Practice, 94, 374-385.
Howard, D., & Dai, D. (2014). Public perceptions of self-
driving cars: The case of Berkeley, California. In
Transportation Research Board 93
rd
Annual Meeting,
14, (4502) 1-16.
Jeon, M., Riener, A., Sterkenburg, J., Lee, J. H., Walker, B.
N., & Alvarez, I. (2018). An international survey on
automated and electric vehicles: Austria, Germany,
South Korea, and USA. In International Conference on
Digital Human Modeling and Applications in Health,
Safety, Ergonomics and Risk Management (pp. 579-
587). Springer, Cham, Switzerland.
Kyriakidis, M., Happee, R., & de Winter, J. C. (2015).
Public opinion on automated driving: Results of an
international questionnaire among 5000 respondents.
Transportation Research Part F: Traffic Psychology
and Behaviour, 32, 127-140.
Lee, J., Chang, H., & Park, Y. I. (2018). Influencing factors
on social acceptance of autonomous vehicles and policy
implications. In Portland International Conference
Proceedings on Management of Engineering and
Technology (pp. 1-6). IEEE, New York, USA.
Liljamo, T., Liimatainen, H., & Pöllänen, M. (2018).
Attitudes and concerns on automated vehicles.
Transportation Research Part F: Traffic Psychology
and Behaviour, 59, 24-44.
Lustgarten, P., & Le Vine, S. (2018). Public priorities and
consumer preference for selected attributes of
automated vehicles. Journal of Modern Transportation,
26(1), 72-79.
Montoro, L., Useche, S. A., Alonso, F., Lijarcio, I., Bosó-
Seguí, P., & Martí-Belda, A. (2019). Perceived safety
and attributed value as predictors of the intention to use
autonomous vehicles: A national study with Spanish
drivers. Safety Science, 120, 865-876.
Morris, D. M., Erno, J. M., & Pilcher, J. J. (2017).
Electrodermal response and automation trust during
simulated self-driving car use. In Proceedings of the
Human Factors and Ergonomics Society Annual
Meeting 61 (pp. 1759-1762). SAGE Publications, Los
Angeles, US.
Noppers, E. H., Keizer, K., Bolderdijk, J. W., & Steg, L.
(2014). The adoption of sustainable innovations:
Driven by symbolic and environmental motives. Global
Environmental Change, 25, 52-62.
Pfleging, B., Rang, M., & Broy, N. (2016). Investigating
user needs for non-driving related activities during
automated driving. In Proceedings of the 15
th
International Conference on Mobile and Ubiquitous
Multimedia (pp. 91-99). ACM, New York, USA.
Qu, W., Xu, J., Ge, Y., Sun, X., & Zhang, K. (2019).
Development and validation of a questionnaire to assess
public receptivity toward autonomous vehicles and its
relation with the traffic safety climate in China.
Accident Analysis & Prevention,128, 78-86.
Regan, M., Cunningham, M., Dixit, V., Horberry, T., Bender,
A., Weeratunga, K., & Hassan, A. (2017). Preliminary
findings from the first Australian national survey of
public opinion about automated and driverless vehicles.
Australia and New Zealand Driverless Vehicle Initiative,
10.13140/RG.2.2.11446.80967.
Rödel, C., Stadler, S., Meschtscherjakov, A., & Tscheligi,
M. (2014). Towards autonomous cars: The effect of
autonomy levels on acceptance and user experience. In
Proceedings of the 6
th
International Conference on
Automotive User Interfaces and Interactive Vehicular
Applications (pp. 1-8). ACM, New York, USA.
SAE International (2018, November 11). SAE International
releases updated visual chart for
its “Levels of driving automation” standard for self-driving
vehicles. Retrieved from https://www.sae.org/news/
press-room/2018/12/sae-international-releases-updated
-visual-chart-for-its-%E2%80%9Clevels-of-driving-
automation%E2%80%9D-standard-for-self-driving-
vehicles.
Schade, J. & Schlag, B. (2003). Acceptability of urban
transport pricing strategies. Transportation Research
Part F: Traffic Psychology and Behaviour, 6(1), 45-61.
Schaefer, K. E., Chen, J. Y., Szalma, J. L., & Hancock, P.
A. (2016). A meta-analysis of factors influencing the
development of trust in automation: Implications for
understanding autonomy in future systems. Human
Factors, 58(3), 377-400.
Schoettle, B., & Sivak, M. (2014). A survey of public
opinion about autonomous and self-driving vehicles in
the US, the UK, and Australia. University of Michigan,
Ann Arbor, Transportation Research Institute.
Sener, I. N., Zmud, J., & Williams, T. (2019). Measures of
baseline intent to use automated vehicles: A case study
of Texas cities. Transportation Research Part F:
Traffic Psychology and Behaviour, 62, 66-77.
Souders, D., & Charness, N. (2016). Challenges of older
drivers’ adoption of advanced driver assistance systems
and autonomous vehicles. In International Conference
on Human Aspects of IT for the Aged Population (pp.
428-440). Springer, Cham, Switzerland.
Steg, L. (2005). Car use: Lust and must. Instrumental,
symbolic, and affective motives for car use.
Transportation Research Part A: Policy and Practice,
39(2-3), 147-162.
Zhang, Q., Wallbridge, C. D., Jones, D. M., & Morgan, P.
(2021, July). The blame game: Double standards apply
to autonomous vehicle accidents. In International
Conference on Applied Human Factors and
Ergonomics (pp. 308-314). Springer, Cham.
Zmud, J., Sener, I. N., & Wagner, J. (2016). Consumer
acceptance and travel behavior: Impacts of automated
vehicles (No. PRC 15-49 F). Texas A&M
Transportation Institute, USA.
Zoellick, J. C., Kuhlmey, A., Schenk, L., Schindel, D., &
Blüher, S. (2019). Amused, accepted, and used?
Attitudes and emotions towards automated vehicles,
their relationships, and predictive value for usage
intention. Transportation Research Part F: Traffic
Psychology and Behaviour, 65, 68-78.
Acceptability and Acceptance of Connected Automated Vehicles: A Literature Review and Focus Groups
231
