
Asguard: Adaptive Self-guarded Honeypot
Sereysethy Touch
a
and Jean-No
¨
el Colin
b
InfoSec Research Group, NaDI Research Institute, University of Namur, Rue de Bruxelles 61, 5000 Namur, Belgium
Keywords:
Adaptive Honeypot, Multiple-objective Honeypot, Reinforcement Learning, Intelligent Honeypot.
Abstract:
Cybersecurity is of critical importance to any organisations on the Internet, with attackers exploiting any se-
curity loopholes to attack them. To combat cyber threats, a honeypot, a decoy system, has been an effective
tool used since 1991 to deceive and lure attackers to reveal their attacks. However, these tools become in-
creasingly easy to detect, which diminishes their usefulness. Recently, adaptive honeypots, which can change
their behaviour in response to attackers, have emerged: despite their promise, however, they still have some
shortcomings of their own. In this paper we survey conventional and adaptive honeypots and discuss their
limitations. We introduce an approach for adaptive honeypots that uses Q-learning, a reinforcement learning
algorithm, to effectively achieve two objectives at the same time: (1) learn to engage with attacker to collect
their attack tools and (2) guard against being compromised by combining state environment and action to form
a new reward function.
1 INTRODUCTION
As computer systems become more open and more
complex, security is still a growing challenge faced
by every organisation on the Internet. Considerable
effort has been exerted and deception techniques (Co-
hen, 2006) have been used to collect and analyse se-
curity logs to study the attacker’s behaviour in hopes
of understanding how an attack unfolds, and to build a
threat modeling (Schneier, 1999). Profiling attacker’s
behaviour requires the examination of actions taken
by attackers and the sequence in which they were exe-
cuted (Ramsbrock et al., 2007). One of the techniques
that has existed since early 1991 is to use a decoy
computer system known as a honeypot which poses
as a vulnerable machine to capture the attack and also
helps to detect an ongoing attack. Since then, several
critical problems have arisen that dramatically reduce
the effectiveness of existing honeypots.
Firstly, during a probe, their presence can be
easily fingerprinted by automated tools or bots due
to their recognisable responses and predictable be-
haviours as pointed out in (Vetterl and Clayton, 2018;
Morishita et al., 2019; Surnin et al., 2019). These au-
thors demonstrated that by studying their responses
and signatures, it is certain that the system behind an
IP address is a honeypot. The detection has been car-
a
https://orcid.org/0000-0003-4657-7131
b
https://orcid.org/0000-0003-4754-7671
ried out on the most widely adopted protocols such
as SSH, Telnet and HTTP. There are also websites
1
that scan the Internet and classify whether an IP ad-
dress is a honeypot. This problem is very critical, as
this undermines the usage of the honeypot and lim-
its adversely how attack data can be collected when
attackers know that they are being watched.
Some systems avoid detection by providing the
expected response, but this can only fool amateur
hackers; experienced ones can still sense that they are
interacting with dummy systems by inspecting certain
aspects of its environment such as the default file sys-
tem, short response time, available tools, limited con-
nectivity, unusual number of open ports and running
services. Attackers can also use an already controlled
system to send out attacks to other computers and
check whether any communications have been altered
or have failed to reach their target. Conventional hon-
eypots try to defer or substitute outgoing messages to
contain them or reduce their effectiveness.
Given these limitations, honeypots deserve more
attention and need more improvement in order to ad-
dress those shortcomings. For that purpose, we pro-
pose a smart honeypot called Asguard that balances
the goals of maintaining the connection with the at-
tacker alive and collecting as much information about
the attack as possible, while avoiding being compro-
mised. Our contribution is two-fold:
1
https://honeyscore.shodan.io/, www.zoomeye.org
Touch, S. and Colin, J.
Asguard: Adaptive Self-guarded Honeypot.
DOI: 10.5220/0010719100003058
In Proceedings of the 17th International Conference on Web Information Systems and Technologies (WEBIST 2021), pages 565-574
ISBN: 978-989-758-536-4; ISSN: 2184-3252
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
565

• A new adaptive self-guarded honeypot using SSH
protocol, that leverages a reinforcement learning
algorithm by combining state and action to form
a new reward function. This allows for a trade-off
between two contradictory objectives: (1) capture
attacker’s tools and (2) guard against malicious at-
tacks.
• A prototype implementation of the proposed ap-
proach by using a fake botnet attack simulator
using real attack data. The experimental results
show that the honeypot can effectively learn the
intended behaviour.
The paper is organised as follows: first, we survey the
honeypot landscape, highlighting the strengths and
weaknesses of the various systems; then, we present
our approach and learning model. Section 4 presents
the experimental setup, its overall architecture and the
results obtained. Section 5 discusses the obtained re-
sults. Finally, we provide a conclusion and future
work.
2 BACKGROUND AND RELATED
WORKS
A honeypot is “a security resource whose value lies in
being probed, attacked, or compromised” (Spitzner,
2003). Different honeypots have been designed and
created for different purposes. There are works in
(Seifert et al., 2006; Mokube and Adams, 2007; Ng
et al., 2018; Nawrocki et al., 2016) that have been
done extensively to cover different types of honeypots
and propose different classifications of these honey-
pots. One of the classifications that is usually found
in the literature is based on their interaction lev-
els. They are low-interaction honeypot (LiHP), high-
interaction honeypot (HiHP) and medium-interaction
honeypot (MiHP).
LiHP refers to a honeypot which uses an emula-
tor to emulate some known vulnerabilities of a sys-
tem, or mimics a limited number of functionalities
of a service or a system. One of the historical and
popular systems is Honeyd, which can emulate vir-
tual hosts and network services by emulating their
network stacks and it can redirect network packets to
real systems (Provos, 2003). Napenthes is used to col-
lect malware by emulating some vulnerabilities in a
service (Baecher et al., 2006). Another well-known
system, meant to be the successor of Napenthese is
Dionaea, which can emulate many popular protocols:
FTP, HTTP, Memcache, MongoDB, MySQL, MQTT,
MSSQL, SMB, etc., (Dionaea, 2015). Conpot is an
Industrial Control Systems honeypot (ICS) designed
to be easy to deploy, modify and extend. Its aim is to
collect intelligence about attacks on the ICS protocols
such as Modbus, IPMI, BACnet, etc., (conpot, 2018).
A HiHP consists of using a full-fledged operating
system or a real application with known or unknown
vulnerabilities. Among those systems, Sebek, one of
the Honeynet projects, is built as a Linux kernel mod-
ule used to capture system calls and keystrokes. The
project is no longer maintained and updated, but its
source code is still available on Github repository as
an archive (Honeynet, 2021). Argos relies on QEMU,
a virtual machine environment, to execute operating
systems as a guest system to detect attacks. It does so
by tracking incoming network data (marked as tainted
data) and detecting any vulnerabilities by using dy-
namic taint analysis. For example, it can detect any
invalid use of jump instruction that triggers the exe-
cution of code supplied by an attacker (Portokalidis
et al., 2006).
In contrast to the two extremes, a MiHP provides
more functionalities compared to the LiHP, but is still
limited compared to HiHP. Examples of such sys-
tems are Kippo (Kippo, 2014) and Cowrie (Ooster-
hof, 2014) its successor. These systems written in
Python can emulate SSH and Telnet protocols that al-
low attackers to login and execute some Linux com-
mands. They can capture shell interactions performed
by the attacker and also save all downloaded files.
They also provide a fake file system that allows at-
tackers to execute file system related commands. IoT-
Pot emulates Telnet protocol which is primarily used
by IoT devices. It relies on a module called Fron-
tend Responder that acts as different IoT devices and
it also handles TCP connection requests, banner in-
teractions, authentication, and command interaction
based on a device profile (Pa et al., 2015).
These conventional systems are widely used by
security researchers and practitioners to collect vari-
ous attack intelligence and attack statistics. The ad-
vantage of the LiHP and MiHP is that their devel-
opments are simple, and they are easy to deploy and
maintain, but their main disadvantage is that they can
be easily identified by attackers due to their simplic-
ity, limited functionalities and predictable behaviour.
The HiHP, however, is useful to collect good qual-
ity attack data, but generally they are very complex
in their design and implementation; for this reason,
they are more difficult to develop, maintain and de-
ploy. Another main drawback is that they are prone to
be compromised by attackers if they are not properly
monitored. Another common problem that is seen
in these conventional honeypots is that they do not
evolve despite the constant changes of attack land-
scape.
DMMLACS 2021 - 2nd International Special Session on Data Mining and Machine Learning Applications for Cyber Security
566

2.1 Adaptive Honeypots
Facing these constantly evolving attacks, we have
seen another new class of honeypots called adap-
tive honeypot which was first introduced in 2011 by
(Wagener et al., 2011b). These systems can adap-
tively modify their behaviour with respect to differ-
ent attack patterns. To engage with attackers, adap-
tive honeypots use different machine learning tech-
niques notably a reinforcement learning (RL) (Sutton
and Barto, 2018) to learn to interact with their envi-
ronment (attackers) to achieve their learning objec-
tives.
Heliza uses SSH protocol as an entry point to let
ill-intent people attack a remotely vulnerable Linux
system (Wagener et al., 2011a). The Linux system
was modified so that the attacker’s commands can be
intercepted and acted upon. It uses four actions: al-
low, block, substitute and insult to control Linux com-
mands executions; for instance, when an attacker sub-
mits a command, it can decide whether the command
should be allowed to execute or blocked. Command
execution can be substituted using pre-determined re-
sults. Heliza can also insult the attacker in the event
that attacker submits some random commands. To
drive this decision making process, it uses SARSA,
an RL algorithm (Sutton and Barto, 2018) to learn to
engage with attackers and achieve its goal. Heliza can
be configured to achieve either (1) to collect attack
tools, or (2) to keep the attacker busy. Heliza shows
that to collect attack tools, the command wget, sudo
and downloaded custom tools should be allowed, and
to keep the attacker busy, the commands such as wget
and tar should be substituted with an error message,
while the command sudo should be blocked instead.
Other improvements over Heliza are RASSH
(Pauna and Bica, 2014) and QRASSH (Pauna et al.,
2018), but in place of using a real Linux system,
they first used Kippo (Kippo, 2014) and later Cowrie
(Oosterhof, 2014) to emulate SSH server and Linux
shell. These systems add a new action delay to slow
down command execution. They respectively use
SARSA (Sutton and Barto, 2018) and DQN (Mnih
et al., 2013) to decide on actions. The same approach
is applied but with a reduced action set to conceal the
honeypot from automated tools which are indifferent
to insults (Dowling et al., 2018).
IoTCandyjar is a honeypot of IoT devices. It
builds the intelligent system IoT-Oracle which learns
to map the attackers query and responses obtained by
scanning IoT devices on the Internet. To choose the
best response to a query, it uses two strategies: firstly,
a random one is used to build the initial knowledge of
the response selection, and then, it uses Q-learning al-
gorithm (Watkins and Dayan, 1992) to learn to choose
among them the best response (Luo et al., 2017).
2.2 Limitations
Despite the promising results of these adaptive sys-
tems, they still present some drawbacks.
• Firstly, systems like Heliza are prone to be com-
promised even thought they can use the action
block to halt the execution of malicious com-
mands. The reason is that it is a HiHP which has a
high risk of being compromised, and another rea-
son is that it simply cannot detect that it is being
compromised.
• The systems which are based on MiHP such as
RASSH, QRASSH and Dowling et al.’s systems
can be easily fingerprinted due to their limited
number of implemented shell commands. As
pointed out by (Surnin et al., 2019) in their detec-
tion methods, despite an invalid command input,
the system always returns zero as exit status.
3 OUR PROPOSED APPROACH
In this section, we will describe our new honeypot
approach that aims at addressing the limitations ex-
posed earlier; it leverages reinforcement learning to
learn how to achieve two opposing objectives: engag-
ing with attacker to collect attack data while keeping
safe of deep system compromise. To do that, we com-
bine environment’s state and action taken by a learn-
ing agent in the RL setting to form a reward function.
3.1 Problem Formulation
Our honeypot poses as a vulnerable Linux system that
attackers can access through SSH server. The honey-
pot allows them to authenticate using any usernames
and passwords. Once authenticated, they can exe-
cute Linux shell commands either by submitting com-
mands to execute without requesting a shell session
or by first opening a shell session. But rather than let-
ting the system be freely compromised, we also want
it to learn to guard against a deep system compro-
mise, hence the name adaptive self-guarded honey-
pot or Asguard. As in Heliza (Wagener et al., 2011a),
our honeypot is a learning agent in the reinforcement
learning problem, in which the agent observes its state
environment, decides on which action to take and re-
ceives a reward signal. We distinguish the learning
phase from the operational phase. At the learning
phase, the agent uses the received reward signal to
Asguard: Adaptive Self-guarded Honeypot
567

calculate state-action values and the objective of the
agent is to find an optimal policy to maximise these
values, whereas in the operational phase, the agent se-
lects action from the learned state-action values (Sut-
ton and Barto, 2018).
3.2 Reinforcement Learning
Formally, a reinforcement learning problem is repre-
sented by a Markov Decision Process (MDP), which
is defined by a tuple
hS, A, P, ri, (1)
where S is a set of discrete finite states representing
the environment, A is a set of actions that the agent
can perform when visiting a state, a probability tran-
sition matrix P(s, a, s
0
) of reaching a next state s
0
from
a state s taking an action a, and r : hs, ai 7→ R is a
reward function when the agent is in a state s ∈ S
and taking an action a ∈ A. In RL, we differentiate
two groups of learning methods: model-based and
model-free methods. The model-based methods such
as dynamic programming and heuristic search require
the model of the environment to be completely de-
fined and available to search for an optimal policy,
whereas the model-free methods such as Monte Carlo
and temporal-difference like SARSA or Q-Learning,
rely only on the experiences through interacting with
its environment and collecting rewards to find the op-
timal policy (Sutton and Barto, 2018). In our case, we
will use a model-free method because we do not have
access to the model of attacks.
3.3 Environment
In our approach, similarly to Heliza (Wagener et al.,
2011a), the state of the environment is defined as the
attacker’s command input. In a typical attack, attack-
ers will input a sequence of these commands, and
each command can be mapped to the following set
of commands:
• L : a set of shell commands and some other in-
stalled programs during the system setup, some
example of commands are cd, pwd, echo, cp, . . .
• D: a set of download commands that are used to
download programs from external servers, for in-
stance we have wget, curl, ftpget, etc., Heliza
does not separate D from L.
• C a set of custom commands which are the com-
mands that attackers have to download from exter-
nal servers before they can be executed, all com-
mands of this type will be mapped to an element
custom, hence C = {custom}.
• U: a set of other inputs that cannot be mapped
to any other above set, it can be an empty string,
ENTER keystroke, hence U = {unknown}.
So the final states of the environment is
S = L ∪ D ∪C ∪U (2)
3.4 Actions
We only select a subset of actions A =
{allow, block, substitute} from Heliza (Wagener
et al., 2011a). That is, allow is to execute the com-
mand, block is to deny its execution, and substitute
is to fake its execution. The reason is that block can
make the attacker change their attack behaviour or
have recourse to different commands when they are
not available on the system, which will result in more
command transitions. Another reason is that block
can protect the honeypot from being compromised
by preventing the execution of malicious commands.
And substitute can also increase command transitions
facing new or unknown programs. However, insult is
not included, because insulting an attacker seems like
an obvious way to advertise the honeypot presence to
attackers. Furthermore, delay from RASSH (Pauna
and Bica, 2014) is not included either, since delaying
the execution of a simple or known command also
raises a suspicion of a honeypot.
3.5 Reward Function
The reward function allows the agent to learn the be-
haviour in an environment; normally the purpose of
the honeypot is to let attackers freely attack the sys-
tem, to capture the attack intelligence; however, with
an additional objective, we also want the honeypot
to avoid being deeply compromised and to adaptively
learn how to best react to an attack. In this regard, the
desired behaviour is (1) to capture attacker’s tools
via download commands, and (2) to allow the hon-
eypot to guard against the risk of being compro-
mised by preventing the execution of custom com-
mands, because we assume that attackers will use
their downloaded custom commands to compromise
the honeypot and use it to attack other systems.
Contrarily to the other systems (Wagener et al.,
2011a; Pauna and Bica, 2014; Dowling et al., 2018)
which can only have one objective and whose reward
functions only depend on the state environment which
is the shell command from the attacker. For our case,
not only do we use the state environment, which is
as well the shell command from the attacker, but
also the action taken by the agent to form a new
reward function. So when an attacker transitions to
DMMLACS 2021 - 2nd International Special Session on Data Mining and Machine Learning Applications for Cyber Security
568
a download command D, and the taken action is al-
low, the agent is then rewarded 1, but when the at-
tacker makes a transition to a custom command C and
the chosen action is allow, it gets a penalty of −1.
Hence, the reward function r
a
at a time-step t is given
as follows:
r
a
(s
t
, a
t
) =
1 if s
t
∈ D and a
t
∈ {allow}
−1 if s
t
∈ C and a
t
∈ {allow}
0 otherwise
(3)
3.6 Learning Algorithm
To decide which action to take in a particular state,
the agent will estimate a state-action value function
q : hs, ai 7→ R. To learn this q-function, we use an
algorithm based on a temporal-difference called Q-
learning (Watkins and Dayan, 1992). This algorithm
is an off-policy algorithm because it uses experiences
derived from a different policy to learn and evaluate
its own policy; it is also a model-free algorithm be-
cause it only relies on its interaction with its environ-
ment without knowing the real dynamics of the en-
vironment (Sutton and Barto, 2018). The update of
q-function of a state s taking an action a, observing a
reward r and reaching a state s
0
by taking an action a
0
is given as follows
q(s, a) = q(s, a) + α
r + γ max
a
0
q(s
0
, a
0
) − q(s, a)
(4)
where α ∈ [0, 1] is a learning rate and γ ∈ [0, 1] is a
discount factor. It has been proved that if the agent
keeps visiting all state-actions indefinitely, it will con-
verge to an optimal policy. To help the agent learns,
we use an ε-greedy policy that will balance between
exploration and exploitation. That is, the agent will
choose to (1) explore by randomly selecting action for
a probability of ε, and (2) exploit its learned policy for
1 − ε probability. The ε should be gradually decayed
to allow the agent to favor its learned q-values. The
algorithm 1 gives a pseudo code of the Q-learning.
4 EXPERIMENT
In this section, we detail the experimental setup used
to validate our approach. The attacker is simulated by
a simple botnet simulator using real attack data. The
purpose of this experiment is to demonstrate a proof-
of-concept of our proposed honeypot that can learn
the correct behaviour policy using the learning algo-
rithm in order to reach its two objectives as defined by
the reward function in equation 3.
Algorithm 1: Q-Learning algorithm (Sutton and Barto,
2018; Watkins and Dayan, 1992).
Initialise q(s, a) for all states s and actions a;
foreach episode do
Initialise state s;
repeat
Choose a from s using ε-greedy policy derived
from q;
Take action a, observe r, s
0
;
q(s, a) =
q(s, a) + α [r + γ max
a
0
q(s
0
, a
0
) − q(s, a)];
Replace s with s
0
;
until s is terminal;
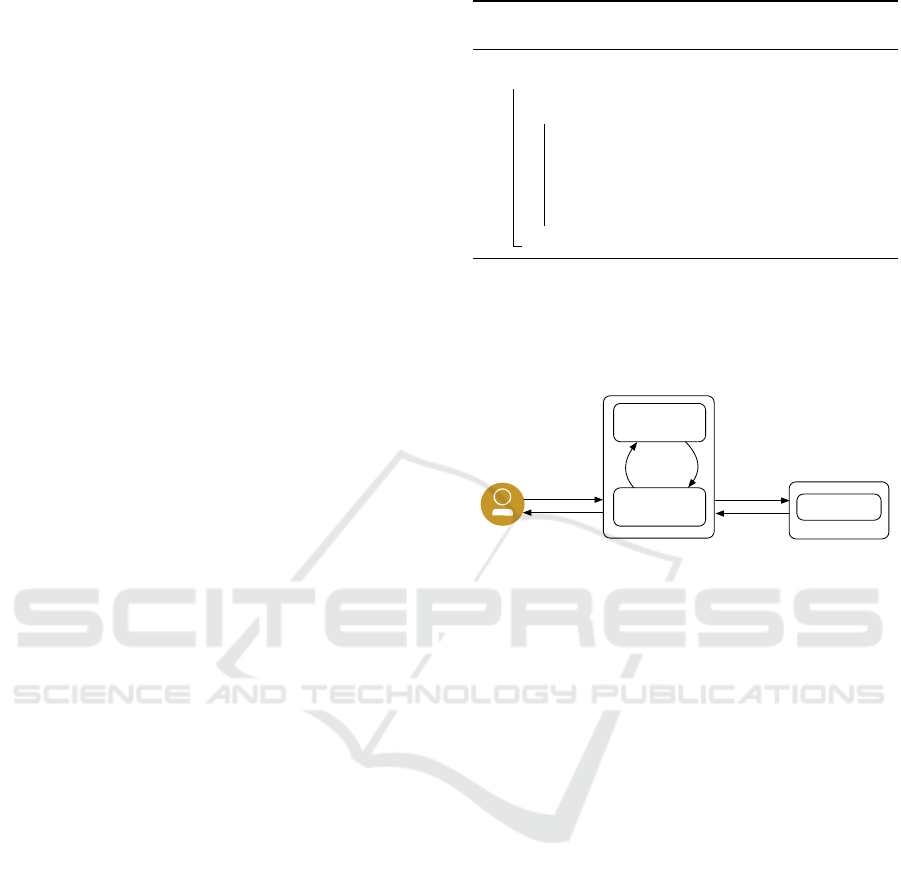
4.1 Architecture
The system is built using a proxy as shown in the fig-
ure below.
Attacker
Proxy
input
command
Linux server
Docker
(1)
Decision Maker
(2)
(3)
forward
command
return
result
return
result
(4)
(5)(6)
query action
return action
Figure 1: The architecture of proxy based honeypots.
The proxy plays the role of SSH server to the at-
tacker and also as a SSH client to a real Linux server
running as a Docker container. The proxy receives
the command from the attacker, and uses it to query
action from the decision making module which im-
plements the learning algorithm as described in the
Algorithm 1. If the action is allow, then the command
will be forwarded for execution in the Linux container
system. After the command is executed, its result is
sent back to the proxy which will return it to the at-
tacker. Alternatively, if the action is block, the proxy
will return a “command not found” message, and fi-
nally if the action is substitute, the command will not
be executed but the proxy will return an existing re-
sponse for that command.
Even though the proxy has been used in honey-
pots before in the HTTP protocol to detect web at-
tacks, or to defend web applications by using decep-
tive techniques (Han et al., 2017; Ishikawa and Saku-
rai, 2017; Fraunholz et al., 2018; Papalitsas et al.,
2018), it has never been used in SSH protocol to inter-
cept its traffic to control it. This proposed architecture
thus comes with several advantages over the existing
systems. Firstly, the proxy allows an independence
between our honeypot and the platform that we want
to use as a honeypot. It also solves some problems
seen in the HiHP, as it does not require the modifica-
tion of the platform, and avoids the need of using em-
Asguard: Adaptive Self-guarded Honeypot
569

ulators in LiHP and MiHP. Running systems or ser-
vices in a sandbox and a controlled environment such
as Docker can contain the risk of malicious attacks.
Another advantage is that the proposed architecture
can be easily applied to other protocols.
4.2 Implementation
The system is built by adding the proxy module with
the decision making module to the standard Cowrie
honeypot (Oosterhof, 2014). In fact, we can use
any programming languages/frameworks
2
to imple-
ment this proxy, but for convenience reasons, we
used Cowrie as it already has a usable authentica-
tion service for SSH server using the Python Twisted
Conch
3
. The decision making module is implemented
in Python3 and Numpy.
4.3 Data Collection
The data used in the experiment were sporadi-
cally collected using the standard Cowrie (Oosterhof,
2014) that emulates an OpenSSH server. Cowrie was
setup to run in a Docker container on a host run-
ning Linux Debian 9, and listened on port 22. We
modified its default configuration such as hostname,
OpenSSH version, and kernel information to match
that of the host system, to avoid detection. The sys-
tem was deployed on the public part of the university
network for the period between 12/2018 and 01/2021.
In total, we logged approximately 81 millions of raw
records, which contain the information related to the
attacks such as network connection, session number,
key exchanges algorithms, SSH client version, con-
nection time, username, password, input commands,
connection duration, downloaded files, etc. We then
group the records of the same session number into
a single collection called episode by combining all
the commands entered during the attack. We have
9 millions episodes but only 217K episodes were re-
lated to Linux commands, others were ports forward-
ing traffics. The 217K episodes were randomly split
respectively into a training (70%) and an evaluation
(30%) datasets using the train test split helper func-
tion from Scikit-Learn.
The figure 2 shows an example of an attack
episode in which the attacker was connected to our
SSH server using libssh2 1.8.0 as SSH client li-
brary. Once the connection was established, they
authenticated as the user root with the password
"!Q@W#E". During the connection, the attacker in-
put a list of commands in which they wanted to iden-
2
https://www.paramiko.org
3
https://twistedmatrix.com/
{
"sensor": "redacted",
"session": "302422f0962b",
"cowrie_session_connect": {
"dst_port": 22,
"src_port": 33550,
"protocol": "ssh",
"src_ip": "redacted",
"dst_ip": "redacted",
"time": { "$date": "2019-03-22T15:57:04.703Z" }
},
"cowrie_client_version": "b’SSH-2.0-libssh2_1.8.0’",
"cowrie_login_success": {
"username": "root",
"password": "!Q@W#E"
},
"cowrie_command_input": ["uname -a ; unset HISTORY
HISTFILE HISTSAVE HISTZONE HISTORY HISTLOG WATCH ;
history -n ; export HISTFILE=/dev/null ; export
HISTSIZE=0 ; export HISTFILESIZE=0 ;
killall -9 perl ; cd /tmp ; wget -q redacted/
wp-admin/images/yc || curl -s -O -f redacted/
wp-admin/images/yc ; perl yc ; rm -rf yc* ; "],
"duration": 2.0553934574127197
...
}
Figure 2: An example of an attack episode as a JSON ob-
ject shows the SSH connection information, username and
password, commands input, attack duration, etc.
tify the system by executing the command uname
-a, then to make sure that no execution trace was
kept, they unset the shell environment variables which
control commands history. After that, the command
killall is used to terminate all the processes perl
before a file named yc was downloaded from a com-
promised web server of a Wordpress application by
using the command wget or curl. The file was then
executed by using perl before it was deleted by the
command rm.
The below table shows the number of total
episodes, the total numbers of commands and the total
of unique episodes.
Table 1: The number of total (Tot.) episodes (Eps.), total
commands (Cmd.) and total unique episodes in the datasets.
Dataset Tot. Eps. Tot. Cmd. Tot. unique Eps.
Training 145,973 2,134,143 56,760
Evaluation 71,898 1,045,914 28,231
Tab. 2 displays the command lengths in each
dataset in which some have zero command due to the
syntax error in the command input. The average num-
ber of commands is 14.62 which consists in general of
the commands that try to fingerprint the honeypots,
DMMLACS 2021 - 2nd International Special Session on Data Mining and Machine Learning Applications for Cyber Security
570

followed by the commands to download files from
the Internet, before they were executed and then re-
moved from the server. Tab. 3 shows the information
related to different attack duration. By examining the
data, many attackers were connected to our system
and only executed a single command to identify the
system by executing the command uname, check the
uptime or run the command echo, and then were dis-
connected. There are some sessions which took very
long time to finish because there are some commands
that require the user interaction and Cowrie did not
implement those commands properly, as a result the
connection was kept open for a long period of time.
Table 2: The minimum (Min.), maximum (Max.) and aver-
age (Avg.) of number of commands (#cmd.) in the datasets.
Dataset Min. #cmd Max. #cmd Avg. #cmd.
Training 0 89 14.62
Evaluation 0 89 14.54
Table 3: The minimum (Min.), the maximum (Max.) and
the average (Avg.) of attack duration in seconds in the
datasets.
Dataset Min. duration Max. duration Avg. duration
Training 0.11 41619.46 66.03
Evaluation 0.12 184279.77 61.44
The figure below shows the distribution of com-
mand execution patterns that we manually identified
in the training dataset and it is shown in the log-scale.
The same distribution is also observed in the evalua-
tion dataset.
Figure 3: The distribution of command execution patterns
in the training dataset.
4.4 Fake Botnet Attack Simulator
To train and evaluate our honeypot using the data de-
scribed in Section 4.3, we built a simulator that sim-
ulates a simple fake botnet attack behaviour which is
similar to the one from (Dowling et al., 2018). For
each episode, the simulator iterates over commands
and changes its attack behaviour with respect to the
action taken by the honeypot on each command sub-
mitted to the honeypot. More precisely, when the ac-
tion is allow or substitute, it will continue to submit
the next command, if any. Only when two consecutive
actions are block, it will then terminate the episode
and move to the next one. This behavior can be modi-
fied to make it more complex over time, for example,
we can have a conditional execution between com-
mand executions. Currently, this fake botnet ignores
the result of the command execution, and just contin-
ues to the next command. The pseudo code of this
simple attack behavior is given below
Algorithm 2: Simple Fake Botnet Attack Behaviour.
foreach episode do
state = "continue";
foreach command do
Submit the command to the honeypot;
Get action for the command, taken by the honeypot;
if action == "allow" or
action == "substitute" then
state = "continue";
if action == "block" then
if state == "continue" then
state = "block";
else
if state == "block" then
state = "terminate";
if state == "terminate" then
terminate the episode;
4.5 Results
We ran the same experiment 10 times with these
hyper-parameters: ε = 0.5 and it is decayed by
0.99991 for each new episode until it reaches the min-
imum value of 0.1, α = 0.01, and γ = 0.99. How-
ever we can only show one instance of the experiment
result, because the obtained results could not be av-
eraged to a single q-value of each command-action
pair. The reason is that the value of q-value depends
on the actions randomly selected during the training
and as mentioned above, the fake botnet ignores the
result of the command execution, though the result
of the commands of interest determining the desired
behaviour appeared consistently the same for all the
experiments. Tab. 4 recapitulates an instance of fi-
nal q-values of some commands, in which the chosen
action for each command corresponds to its highest
q-value highlighted in bold. The result clearly indi-
cates that the action allow is chosen for the download
command wget which follows the first objective of
getting attack’s tools, but the action block is selected
instead for the command custom, which does match
Asguard: Adaptive Self-guarded Honeypot
571

the second objective of protecting the honeypot. For
the other commands, the selected actions are less sig-
nificant due to the randomness of the action selection.
Table 4: Final q-values of some commands of Asguard.
Command allow block substitute
tar 0.1015 0.0042 0.0064
sudo .0 .0 0.0076
chmod 0.1824 0.1398 0.1482
uname 0.0756 0.0763 0.0846
unknown 0.0992 0.2720 0.1536
custom -0.9250 0.0594 0.0457
ps 0.0896 0.0154 0.0206
wget 1.7083 0.4956 0.5095
bash 0.1092 0.1080 0.1212
4.6 Evaluation
In this section, we compare the performance of As-
guard with a newly developed system called Midgard.
Since we cannot compare the proposed solution side-
by-side with the other adaptive systems, because to
the best of our knowledge, this is the first time
that such system can learn to achieve two objectives
(Eq. 3), whereas the previous systems can only learn
to achieve a single objective. Midgard shares the
same objectives, architecture and implementation as
Asguard, except that its reward function only de-
pends on the state environment like in the existing
adaptive systems (Wagener et al., 2011b; Pauna and
Bica, 2014; Dowling et al., 2018). That is, when an
attacker transitions to a download command D, the
agent is rewarded 1 regardless of any actions taken,
and when an attacker transitions to a custom com-
mand C, it is given −1 for any actions taken. Thus, its
reward function at a time-step t is given below
r
m
(s
t
, a
t
) =
1 if s
t
∈ D and ∀a
t
∈ A
−1 if s
t
∈ C and ∀a
t
∈ A
0 otherwise
(5)
We conducted the same experiment (Section 4) 10
times for Midgard, and use its result as a baseline to
compare it with the Asguard’s result. To evaluate their
performances, we can consider our problem as a clas-
sification problem in Machine Learning. That is, the
command wget is allowed, and the command custom
is either blocked or substituted, they are considered as
True Positive. If the command wget is blocked or sub-
stituted, and the command custom is allowed, they
are considered as False Positive. We calculate aver-
age precision and recall over the 10 trained agents
by using the same fake botnet simulator on our eval-
uation dataset on two settings: exploration and no-
exploration. The former means that the agent still
randomly chooses some actions for a small constant
probability of ε = 0.1, and the latter means that the
agent fully exploits its learned policy.
Tab. 5 displays the average precision and recall
for the two commands custom and wget for both As-
guard and Midgard. The results show that in the two
evaluation settings, Asguard reaches the precision of
more than 93% in getting attacker’s tools, and 96%
in protecting itself, while Midgard only reaches ap-
proximately 68% for the two objectives. The recall
results also indicate that Asguard can recover more
than 91% of the available commands, compared to
less then 50% for Midgard.
Table 5: The average (Avg.) precision and recall of the
commands wget and custom of Asguard and Midgard.
Exploration No-Exploration
Asguard Midgard Asguard Midgard
wget
Avg. Precision 0.9353 0.4832 1 0.5
Avg. Recall 0.9180 0.4632 0.9874 0.4828
custom
Avg. Precision 0.9676 0.7866 1 0.8
Avg. Recall 0.9265 0.4321 0.9695 0.4119
The Fig. 4 illustrates an instance of the learning
curves of q-value of the two systems, in contrast to
Asguard which quickly converges to the correct q-
values, Midgard struggles to learn the correct val-
ues for the two commands. Tab. 6 shows the aver-
age percentage of the total commands across the ex-
periments, that are recovered during the evaluation.
Again, Asguard still performed better in recovering
the total commands compared to Midgard.
5 DISCUSSION
The experimental results show that what Asguard
learned matches the two learning objectives: allowing
download commands to execute will result in getting
attacker’s tools, while blocking or substituting their
executions will protect the honeypot from being fully
compromised. However, systematically preventing
the execution of all attacker’s tools also restricts our
ability to understand a more sophisticated attack be-
haviour, or Advanced Persistent Threat (APT) which
can take place in different time periods. Furthermore,
preventing the execution of the attacker’s downloaded
tools is not the only way that keeps the honeypot safe
because there are other methods that the attacker can
use to compromise it.
Using a proxy to the real system or service can
easily fool attackers into thinking that they are attack-
DMMLACS 2021 - 2nd International Special Session on Data Mining and Machine Learning Applications for Cyber Security
572

Figure 4: The learning curves of q-values for the commands wget and custom for Asguard and Midgard.
Table 6: The average (Avg.) percentage (per.) of the total
commands (cmd.) recovered for Asguard and Midgard.
Exploration No-exploration
Asguard Midgard Asguard Midgard
Avg. per. total
cmd. recovered
97.64% 82.97% 99.84% 98.65%
ing a real one; as shown in the evaluation result, the
agent can successfully “engage” with attackers by re-
covering more than 97% of the total commands, but
this experiment is limited by the fact that we only
used the attack simulator that exhibits a simple at-
tack pattern and currently, it completely ignores the
return of the command executions. Facing with real
human attackers or clever attackers, their behaviours
may be different and/or unpredictable, therefore, the
agent may take longer to learn the intended behaviour,
or it can fail entirely to learn, especially at the early
stage of the learning phase, as the agent relies on a
random policy to choose the actions and only receives
a reward to update its policy when reaching the goal
states. For example the attacker can try to execute
some basic shell commands like cd, ls or echo which
are supposedly available on all Linux systems, but the
agent can randomly decide to block them by returning
the error message of command not found instead,
this can be used to fingerprint the system, which will
considerably reduce the command transitions, hence,
the agent will never have the chance to interact longer
with attackers to learn their behaviour.
Another difficulty arisen from using the proxy to
intercept the command input to make decision is that
the attacker can hide all their commands in a shell
script and then execute it; in this case, the proxy may
not be able to intercept these hidden commands, the
only thing that it can catch is the script file. To remedy
this problem, the proxy will have to go one step fur-
ther by detecting the presence of the shell script and
analysing its content, which could require additional
development. But this is a trade-off between using the
proxy to intercept the attacker input to deceive attack-
ers to some extent, and diving deeper into a kernel
space to intercept system calls to make decision as in
the case of Heliza (Wagener et al., 2011a).
6 CONCLUSION AND FUTURE
WORK
In this paper, we proposed a new adaptive honeypot
for the SSH protocol, that can find a trade-off be-
tween two learning opposing objectives: engage with
attacker to collect information on attacks, and also
guard against the risk of being compromised seen in
high-interaction honeypots, as a result of the new re-
ward function that combines the state environment
and the action of the agent. This combination allows
us to define more complex learning objectives that
help the agent to learn faster, as opposed to the reward
function that only depends on the state. We also pro-
posed an implementation of our proposed approach
using proxy that makes it possible to separate between
our honeypot and the platform that we want to use as
a honeypot. This can avoid the need of modifying the
platform, a major problem of high-interaction honey-
pots, and using emulators, another limitation of low-
and medium-interaction honeypots.
As our next steps, we will deploy this system in
real environment and evaluate its performance and
quality in terms of data being collected. Another fu-
ture direction that we want to investigate is to con-
sider a more complex attack behaviour and a complex
state observation, that will see the state as a combi-
nation of command and its arguments, and the honey-
pot properties such as resources (CPU, memory) con-
sumption, network connections. . . We will also extend
the notion of risk of being compromised by defining it
as different risk levels that allow the agent to adapt ac-
cordingly, which was discussed in the above section.
REFERENCES
Baecher, P., Koetter, M., Holz, T., Dornseif, M., and Freil-
ing, F. (2006). The nepenthes platform: An effi-
cient approach to collect malware. In International
Workshop on Recent Advances in Intrusion Detection,
pages 165–184. Springer.
Cohen, F. (2006). The use of deception techniques: Honey-
pots and decoys. Handbook of Information Security,
3(1):646–655.
Asguard: Adaptive Self-guarded Honeypot
573

conpot (2018). conpot. https://github.com/mushorg/conpot.
[Online; accessed 13-July-2021].
Dionaea (2015). dionaea. https://github.com/DinoTools/
dionaea. [Online; accessed 13-July-2021].
Dowling, S., Schukat, M., and Barrett, E. (2018). Improv-
ing adaptive honeypot functionality with efficient re-
inforcement learning parameters for automated mal-
ware. Journal of Cyber Security Technology, 2(2):75–
91.
Fraunholz, D., Reti, D., Duque Anton, S., and Schotten,
H. D. (2018). Cloxy: A context-aware deception-as-a-
service reverse proxy for web services. In Proceedings
of the 5th ACM Workshop on Moving Target Defense,
pages 40–47.
Han, X., Kheir, N., and Balzarotti, D. (2017). Evaluation of
deception-based web attacks detection. In Proceed-
ings of the 2017 Workshop on Moving Target Defense,
pages 65–73.
Honeynet (2021). Sebek: kernel module based data capture.
[Online; accessed 13-July-2021].
Ishikawa, T. and Sakurai, K. (2017). Parameter manipula-
tion attack prevention and detection by using web ap-
plication deception proxy. In Proceedings of the 11th
International Conference on Ubiquitous Information
Management and Communication, pages 1–9.
Kippo (2014). Kippo. https://github.com/desaster/kippo.
[Online; accessed 13-July-2021].
Luo, T., Xu, Z., Jin, X., Jia, Y., and Ouyang, X. (2017). Iot-
candyjar: Towards an intelligent-interaction honeypot
for iot devices. Black Hat.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M.
(2013). Playing atari with deep reinforcement learn-
ing. arXiv preprint arXiv:1312.5602.
Mokube, I. and Adams, M. (2007). Honeypots: con-
cepts, approaches, and challenges. In Proceedings of
the 45th annual southeast regional conference, pages
321–326. ACM.
Morishita, S., Hoizumi, T., Ueno, W., Tanabe, R., Ga
˜
n
´
an,
C., van Eeten, M. J., Yoshioka, K., and Matsumoto, T.
(2019). Detect me if you. . . oh wait. an internet-wide
view of self-revealing honeypots. In 2019 IFIP/IEEE
Symposium on Integrated Network and Service Man-
agement (IM), pages 134–143.
Nawrocki, M., W
¨
ahlisch, M., Schmidt, T. C., Keil, C., and
Sch
¨
onfelder, J. (2016). A survey on honeypot software
and data analysis. arXiv preprint arXiv:1608.06249.
Ng, C. K., Pan, L., and Xiang, Y. (2018). Honeypot Frame-
works and Their Applications: A New Framework.
Springer.
Oosterhof, M. (2014). Cowrie. [Online; accessed 13-July-
2021].
Pa, Y. M. P., Suzuki, S., Yoshioka, K., Matsumoto, T.,
Kasama, T., and Rossow, C. (2015). Iotpot: analysing
the rise of iot compromises. In 9th {USENIX} Work-
shop on Offensive Technologies ({WOOT} 15).
Papalitsas, J., Rauti, S., Tammi, J., and Lepp
¨
anen, V.
(2018). A honeypot proxy framework for deceiving
attackers with fabricated content. In Cyber Threat In-
telligence, pages 239–258. Springer.
Pauna, A. and Bica, I. (2014). Rassh-reinforced adaptive
ssh honeypot. In Communications (COMM), 2014
10th International Conference on, pages 1–6. IEEE.
Pauna, A., Iacob, A.-C., and Bica, I. (2018). Qrassh-
a self-adaptive ssh honeypot driven by q-learning.
In 2018 international conference on communications
(COMM), pages 441–446. IEEE.
Portokalidis, G., Slowinska, A., and Bos, H. (2006). Argos:
an emulator for fingerprinting zero-day attacks for
advertised honeypots with automatic signature gen-
eration. ACM SIGOPS Operating Systems Review,
40(4):15–27.
Provos, N. (2003). Honeyd-a virtual honeypot daemon. In
10th DFN-CERT Workshop, Hamburg, Germany, vol-
ume 2, page 4.
Ramsbrock, D., Berthier, R., and Cukier, M. (2007). Pro-
filing attacker behavior following ssh compromises.
In Dependable Systems and Networks, 2007. DSN’07.
37th Annual IEEE/IFIP International Conference on,
pages 119–124. IEEE.
Schneier, B. (1999). Attack trees. Dr. Dobb’s journal,
24(12):21–29.
Seifert, C., Welch, I., and Komisarczuk, P. (2006). Taxon-
omy of honeypots. Technical report cs-tr-06/12, Vic-
toria University of Wellington, School of Mathemati-
cal and Computer Sciences.
Spitzner, L. (2003). Honeypots: Tracking Hackers, vol-
ume 1. Spitzner, Lance.
Surnin, O., Hussain, F., Hussain, R., Ostrovskaya, S.,
Polovinkin, A., Lee, J., and Fernando, X. (2019).
Probabilistic estimation of honeypot detection in in-
ternet of things environment. In 2019 International
Conference on Computing, Networking and Commu-
nications (ICNC), pages 191–196. IEEE.
Sutton, R. S. and Barto, A. G. (2018). Reinforcement learn-
ing: An introduction. MIT press.
Vetterl, A. and Clayton, R. (2018). Bitter harvest: Systemat-
ically fingerprinting low-and medium-interaction hon-
eypots at internet scale. In 12th {USENIX} Workshop
on Offensive Technologies ({WOOT} 18).
Wagener, G., Dulaunoy, A., Engel, T., et al. (2011a). He-
liza: talking dirty to the attackers. Journal in computer
virology, 7(3):221–232.
Wagener, G., State, R., Engel, T., and Dulaunoy, A.
(2011b). Adaptive and self-configurable honeypots.
In 12th IFIP/IEEE International Symposium on In-
tegrated Network Management (IM 2011) and Work-
shops, pages 345–352. IEEE.
Watkins, C. J. and Dayan, P. (1992). Q-learning. Machine
learning, 8(3-4):279–292.
DMMLACS 2021 - 2nd International Special Session on Data Mining and Machine Learning Applications for Cyber Security
574
