
Partitioned Reconstruction of Contact Forces in Tactile Sensor
Arrays for Robotic Sensing Systems
María-Luisa Pinto-Salamanca
a
and Wilson-Javier Pérez-Holguín
b
Doctoral Program in Engineering with an emphasis in Electronics Engineering, School of Electronic Engineering, GIRA
Research Group, Universidad Pedagógica y Tecnológica de Colombia UPTC, Colombia
Keywords: Tactile Sensing, Contact Forces Reconstruction, Tactile Sensor Array, Force Sensors, Robot Sensing Systems.
Abstract: The reconstruction of contact forces is essential for the performance of robotic manipulation systems from
the information captured by tactile sensors. This work explores the implementation of a model-driven
approach for the triaxial reconstruction of contact forces in tactile sensor arrays using a partition algorithm
that estimates forces in smaller subarrays on a flat and rigid surface. The validation of the presented approach
depends on a prior verification of compliance with the centroids of traction and compression for each analysed
subarray. Considering the force estimation errors, the proposed approach shows a better behaviour than
similar works for single contacts in the force reconstruction for multiple contact events and when using large
size sensors arrays. In addition, the application of the partitioning approach demonstrates a significant
decrease in response time by reducing the number of operations that are needed for the force reconstruction
calculation. Although the relative errors are still significant, the results obtained allow verifying a clear
contribution to the reconstruction of contact events under processing time restrictions for sensor arrays
ranging from small to large scale, that favors the development of electronic skin in robotic applications.
1 INTRODUCTION
The feedback of forces and the perception of contact
events in real-time play a fundamental role in the
planning of the robot's interactions with the
environment (Lambeta et al., 2020) as well as in the
grip or slip control loops (Masoumian et al., 2020).
Likewise, forces estimation is essential for robotic
manipulation and human-robot interaction since the
obtained force components allow a complete
description of a contact phenomenon (Ciotti et al.,
2019).
To replicate the human sense of touch, tactile
sensing systems employ a tactile sensor layer, an
electronic interface layer, and a tactile data decoding
system (Dahiya, et al., 2010), (Ibrahim et al., 2017).
Tactile sensing systems allow performing tasks as
tactile exploration, object identification, and object
grasping and movement. Tactile perception
contributes to expanding the capabilities of robotic
manipulators, humanoid robots, and biomedical
devices, among other applications. An example of
a
https://orcid.org/0000-0002-2089-0683
b
https://orcid.org/0000-0001-5238-4470
that is the combination of robotics with tactile sensing
systems, which provides emulation functions of
fingers perception in sophisticated manipulation of
dexterous grippers in hand robots or manipulators (Y.
Li et al., 2019).
Considering the contact medium, tactile sensors
can be continuous or discrete. In particular, discrete
tactile sensors are usually organized as arrays of
individual sensors that can simultaneously be
activated in response to a contact event (Mohammadi
et al., 2019).
The basic unit in tactile sensor arrays is known as
‘taxel’, which is in charge of measuring a contact
event in a single point (Dahiya et al., 2010). Tactile
sensors can also be configured as arrays of taxels to
cover flat areas (Seminara et al., 2015), hard or soft
surfaces (Yuan, et al. 2017), or deformable areas
(Ciotti et al., 2019). Some sensor arrays offer three or
six-axis force estimation with sensing areas up to
4.7mm × 4.7mm with 24 taxels (XELA Robotics Inc).
However, most sensor arrays measure stress or
normal force. In such cases, additional processing
steps are required to decode triaxial forces.
182
Pinto-Salamanca, M. and Pérez-Holguín, W.
Partitioned Reconstruction of Contact Forces in Tactile Sensor Arrays for Robotic Sensing Systems.
DOI: 10.5220/0010716200003061
In Proceedings of the 2nd International Conference on Robotics, Computer Vision and Intelligent Systems (ROBOVIS 2021), pages 182-189
ISBN: 978-989-758-537-1
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

The contact forces reconstruction process allow
obtaining the force distribution on a surface from
tactile sensor measures (Seminara et al., 2015) using
analytical models based on physical laws (model-
driven), machine learning frameworks (data-driven)
(Wasko et al., 2019), and mixed approaches. Sensors
employed with such approaches comprehend vision-
based, piezoresistive, magnetic, piezoelectric, Hall
Effect, and biomimetic technologies.
Some applications of forces estimation in the
robotics field include shape-recognition in robot-
objects interaction (X. Li et al., 2020), wearable assist
robots (Ito et al., 2019), grasping object in robotic
hands (Mohammadi et al., 2019), human-robot
interaction (Cirillo et al., 2016), robotic skin (Trueeb
et al., 2020), and soft artificial skin (Duong & Ho,
2021), among others.
In tactile sensing systems, there are different
contact sensing areas for electronic skin applications
covering from small to large scales, depending on the
resolution and number of taxels in the sensor array.
Seminara et al. (2015) cover an area close to 36mm ×
36mm using a 3mm thick elastomer layer and a sensor
grid of 10×10 piezoelectric taxels. Duong & Ho
(2021) pose a vision-based model using a FEM
analysis to establish the relationship between nodal
displacements of the markers and external forces
achieving to cover an area of 49763mm
2
. However,
in the case of works focused on vision, the sensors’
size, and the dependence on complex image
processing algorithms, make it difficult to extend its
use to large artificial skin development in portable
robotics or biomedical applications.
Proper emulation of the human sense of touch
involves meeting a strict time limit to detect contact
events and process them in less than 1 ms (Dahiya, et
al., 2010). A challenge for applications using a
discrete array of sensors is to achieve a reasonable
compromise between the execution speed and the
accuracy of the results, considering the need for
developing calibrating algorithms and parallel
process scenes of complex contact events in real-
time.
There are few works in the literature (Seminara et
al., 2015), (Cimino, 2016) centered on the real-time
implementation of force reconstruction algorithms
employing sensor arrays. These authors propose the
reconstruction of triaxial contact force distributions
on a soft layer surface from the normal stress data
retrieved from a piezoelectric sensor array. Although
this work could be used with other sensor arrays
whose taxels provide discrete stress data, its
application has not been generalized.
This work analyzes, at the simulation level, the
implementation of the model-driven proposed by
Seminara et al. (2015) to reconstruct contact forces in
tactile sensor arrays with a partitioned approach,
considering smaller subarrays. The partitioning
approach was applied to arrays of sensors of different
resolutions ranging from 10×10 to 48×48 taxels to
covering different contact areas. This approach is
aimed to reduce the computational load that allows
speeding up the calculation times required for the
reconstruction of forces. Although the errors obtained
are relatively high, it is expected that combining this
approach with a hardware implementation (FPGA-
like) will achieve compliance with the 1 ms limit in
tactile sensor applications using large arrays of
normal stress sensors.
2 MATERIALS AND METHODS
2.1 Contact Forces Estimation for
Tactile Sensor Arrays
The model-driven approach proposed by Seminara et
al. (2015) allows the estimation of the intensities and
directions of contact forces (three−dimensional force)
starting from normal stress data of a discrete tactile
sensor (single−dimensional data). This is relevant
because this approach would extend the application
of normal stress tactile sensors to the triaxial forces
estimation. The Seminara et al. (2015) model is based
on the solution to the inverse problem of the
Boussinesq equation for an elastic half-space
(Johnson, 1985). This model estimates force vectors
in the same taxels XY-coordinates, on the sensor cover
layer at a distance h on the z-axis (sensor thickness).
This model establishes that the triaxial forces
components (𝑥
force in x-axis, 𝑥
force in y-axis,
and 𝑥
force in z-axis) are defined as:
𝑥
𝑥
𝑥
=𝐶
𝑏+
I−𝐶
C
𝑤 (1)
where, b is a normal stress vector sensed by the taxels
in the sensor array, C is a matrix defined by the vector
distances given between the taxels coordinates and
the points where the force vectors are reconstructed,
𝐶
is the Moore-Penrose pseudo-inverse matrix of C
(Albert, 1972), and w is a vector that depends both on
two continuous scalar variables µ
1
and µ
2
, as well as
on the geometry and the sensor input data.
Partitioned Reconstruction of Contact Forces in Tactile Sensor Arrays for Robotic Sensing Systems
183
The values for µ
1
and µ
2
are defined to maximize
an Π objective function that simultaneously fulfils
three physical restrictions: i) compressive normal
forces, ii) tangential forces and normal forces
similarly distributed over the contact area, and iii) no
pinch.
The Seminara et al. (2015) model proposes two
stages to define the objective function (called
preparative phase) and find the optimal solution
(called iterative phase). The preparative phase
includes calculating the matrices, reading the data
from the tactile sensor, and calculating the centroids
required to establish the physical constraints and the
objective function. The iterative phase allows finding
the values of µ1 and µ2 that optimize the Π function.
By a comparison between a FEM simulation and the
analyzed model, the maximum estimated errors were
about 13% in the resultant tangential forces for
Hertzian contacts and 43% of the resultant force in
the x-axis for non-Hertzian contacts (Seminara et al.,
2015).
The mentioned model was evaluated through a
software implementation conducted in Matlab®
R.2020b, by varying the sensor parameters, the taxels
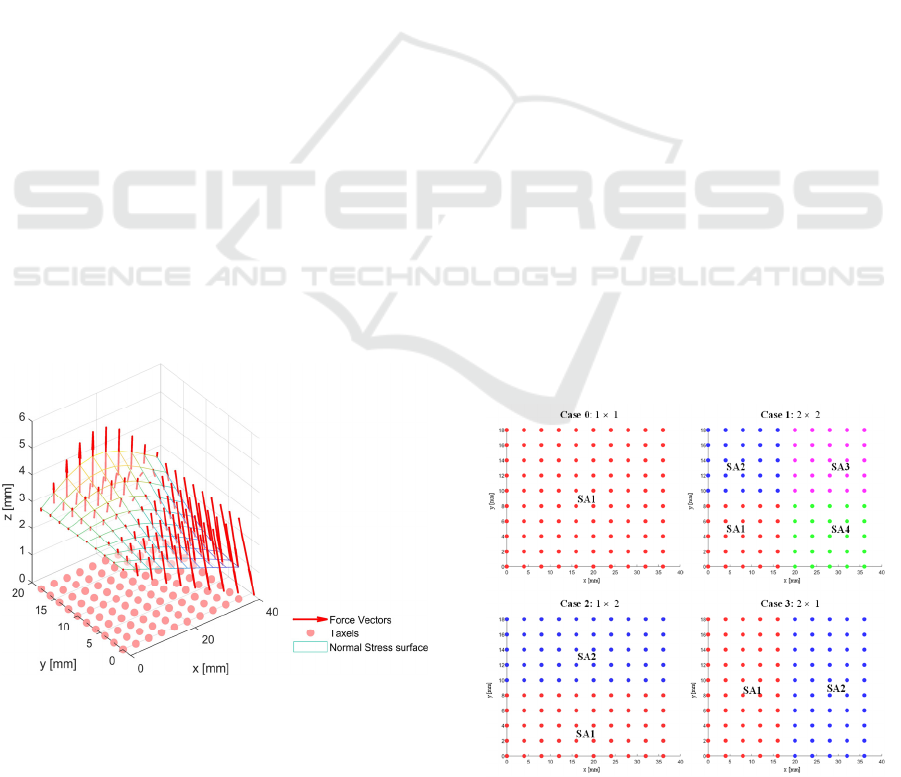
data and the force coordinates. Figure 1 shows a case
of force reconstruction for a tactile sensor array of
10×10 taxels with 4mm×2mm resolution in the XY-
plane and 3mm thickness. For this example, the
normal stress data values read by the sensor are
between -36000 [N/m
2
] to 20912 [N/m
2
]. These were
obtained experimentally by applying the function:
𝑆
𝑥,𝑦
=1x10
∗
𝑦 Sin
100𝑥
+𝑥 Cos
100𝑦
(2)
Figure 1: Contact forces reconstruction applying the model-
driven proposed by (Seminara et al., 2015). Scale factors:
Fx=10000[N/mm], Fy=10000 N/mm], Fz=1 [N/mm],
Normal stress surface = 0.003 + S*20000 [N/m2].
2.2 Partitioning Approach to the
Forces Estimation
The partitioning approach proposed involves
sectioning the tactile sensor array into subarrays of
equal size and applying the force reconstruction
algorithm proposed by Seminara et al. (2015) in each
subarray as if they were independent sensors. Then,
these are grouped together to obtain the overall
response of the force estimates.
Although it is clear that the principle of
superposition cannot be applied to a non-linear
model, the sharp decrease in the size of the operations
of the matrix and its consequent decrease in the
system's response time justify the evaluation of the
proposed approach. This approach should be used
considering the accuracy requirements for force
estimation, which may vary in each case.
The algorithm to implement the model-driven of
Seminara et al. (2015) has a computational
complexity of 𝑂𝑑
order, where d is the size of the
tactile sensor array (Wasko et al., 2019). The model
application implicates matrix operations of
3
𝑛
×
𝑛
×3
𝑛
× 𝑛
order, where 𝑛
and 𝑛
are the
number of horizontal and vertical taxels in the array.
Hence, if the size of the array decreases, the
calculation time also decreases. Figure 2 shows four
partition cases to be considered in the proposed
approach that include:
Case 0: the reconstruction of forces in a sensor
array without a subarray (SA0 1×1)
Case 1: mix of the cases above with four subarrays
SA1-SA4 (2×2 subarrays).
Case 2: two vertical subarrays SA1-SA2 (1×2)
Case 3: two horizontal subarrays SA1-SA2 (2×1)
Figure 2: Partition Cases Analyzed in the Contact Force
Reconstruction Approach.
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
184
The performed tests comprise four tactile sensor
arrays whose characteristics are described in Table 1.
For the cases of 10 × 10 taxel matrices, normal stress
data corresponding to Hertzian and non-Hertzian
contact events were the same used by (Seminara et
al., 2015). In the 20×20 taxel array, the sensor input
data were combinations of Hertzian and non-Hertzian
contacts. The input data for the 48×48 array were
obtained with an FSR Matrix Array Sensor for the
plantar pressure measurement systems (PPMs)
described in (Castro et al., 2020).
Table 1: Included Sensors for the implementation of the
partitioned approach.
Tactile
Sensor
Taxels Array
𝑛
× 𝑛
Size
[mm
× mm × mm]
Taxels
Separation
Resolution
[mm × mm]
Sensor 1 10 × 10 20 × 40 × 3 4 × 2
Sensor 2 10 × 10 40 × 40 × 3 4 × 4
Sensor 3 20 × 20 20 × 40 × 3 4 × 2
Sensor 4 48 × 48 384 × 384 × 0.91 8 × 8
The search for the optimal parameters µ1 and µ2
was carried out using the Matlab® function fmincom.
The objective function Π is conditioned for the
centroids of the contact event (Centroids Condition)
such that: the data detected in the matrix must include
positive and negative values to calculate the
compression and tension centroids simultaneously.
Consequently, the partitioning approach initially
checks for this condition on the data in the subarray.
If this condition is met, the approach try to perform as
much partitionings as possible.
In the proposed approach the preparatory phase of
each partitioning case comprises: i) separate stress
data from each partition, ii) redefine the coordinates
of the taxels and the force estimation, iii) calculate the
C matrix and the 𝐶
pseudo-inverse matrix for each
subarray, iv) determine the centroids of tension and
compression for each subarray, and finally v)
evaluate the Π functions.
The iterative phase for each analyzed partition
includes two stages: i) find the optimal values to the
parameters µ1 and µ2 for each analyzed subarray, and
ii) compare the minimum forces obtained with an
established threshold. Finally, the algorithm groups
the reconstructed forces to present a force vector for
each taxel.
3 ANALYSIS OF RESULTS
The simulations carried out applying the proposed
approach generate the estimation errors presented in
Table 2, according to cases 0 to 3 described in the
previous section and the sensor parameters shown in
Table 1. The resulting forces correspond to the sum
of the estimated forces in each axis (𝑋
=
∑
𝑥
, 𝑋
=
∑
𝑥
, 𝑋
=
∑
𝑥
). The error was calculated as:
𝐸𝑟𝑟𝑜𝑟 =
𝑅𝑒𝑓.𝑣𝑎𝑙𝑢𝑒– 𝑅𝑒𝑠𝑢𝑙𝑡𝑎𝑛𝑡 𝐹𝑜𝑟𝑐𝑒
𝑅𝑒𝑓.𝑣𝑎𝑙𝑢𝑒
(3)
For the force reconstruction using sensors 1 and
2, the reference values for error estimation were
obtained by mean a FEM simulation developed in
COMSOL® by Seminara et al. (2015). In the analysis
carried out with sensors 3 and 4, the estimation error
was similar to those obtained for Case 0 (without
partitioning). Due to the application of Equation 3,
Table 2 contains some negative values for the error.
Table 2: Estimation errors obtained during the partitioning
approach validation.
Sensor
Analysis
Case
Estimation errors
X
1
X
2
X
3
1
0 12.84% 12.93% 7.54%
1 77.52% 65.69% -23.57%
2 46.32% 71.17% -15.15%
3 64.41% 5.60% -0.46%
2
0 -39% 16% -1%
1 17.52% 51.22% -11.60%
2 -97% 55% -5%
3 42% -1% -7%
3
0 0% 0% 0%
1 3.91% -12.67% -1.37%
2 0.11% 0.07% -1.15%
3 5.05% -12.05% -0.23%
4
0 0% 0% 0%
1 51.04% 68.98% -5.44%
2 49.10% -63.09% -5.21%
3 51.61% -67.72% -4.25%
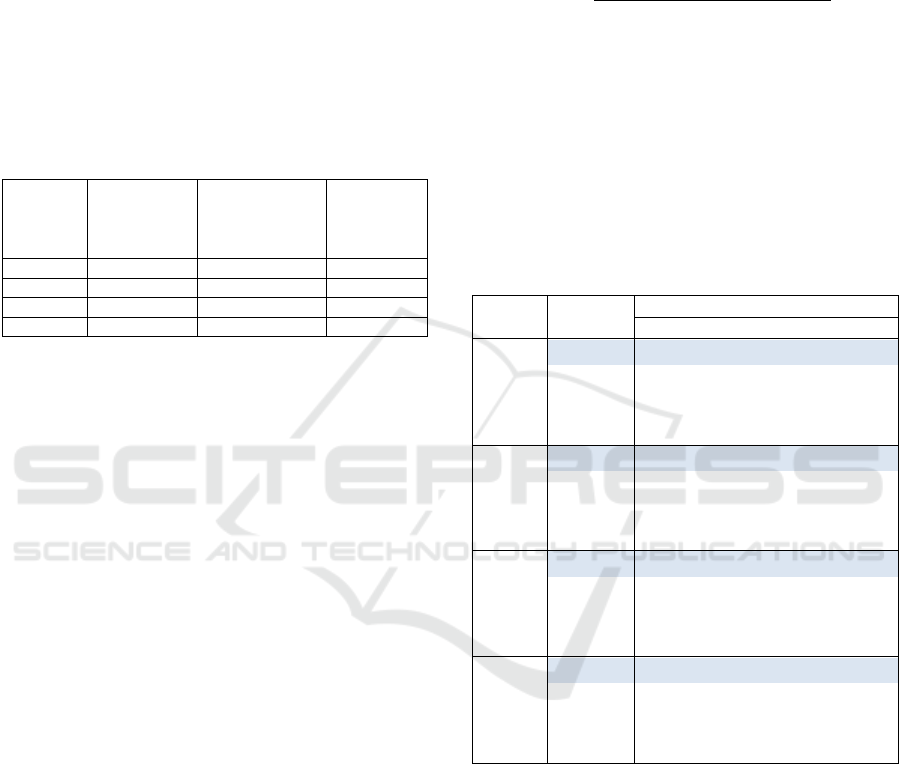
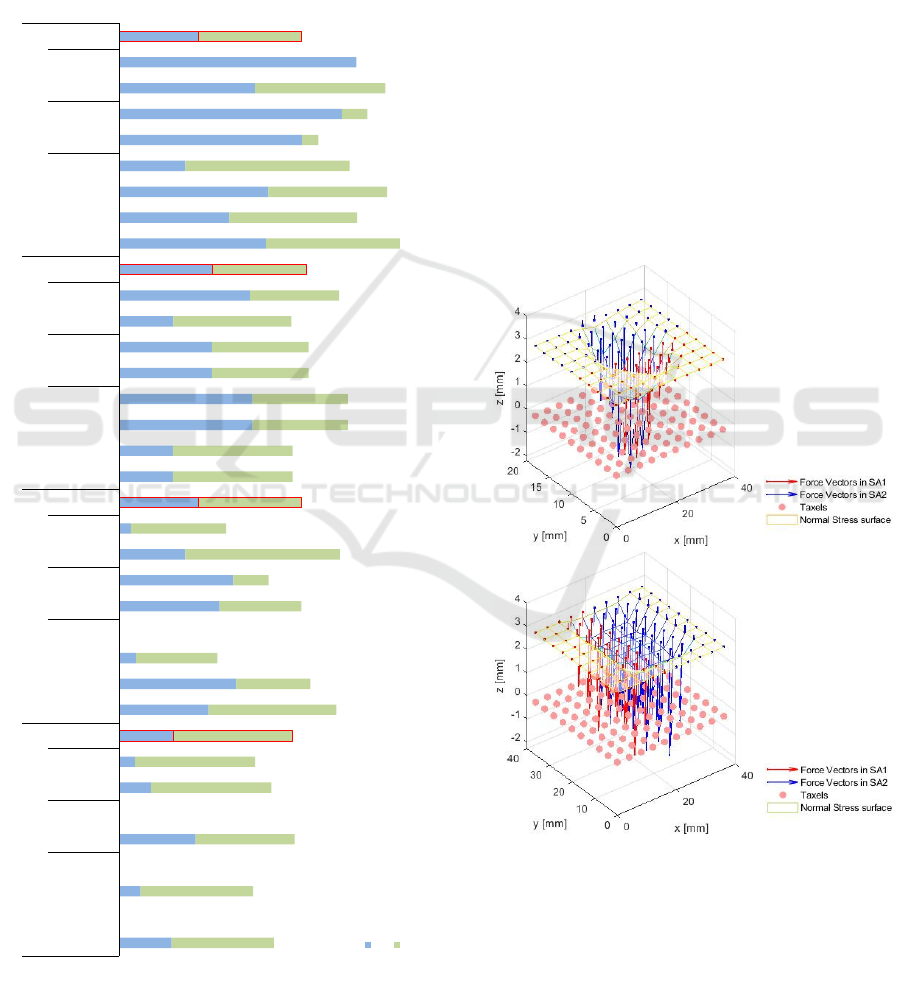
Figure 3 shows a comparison between the optimal
values µ1 and µ2 for each case. During the approach
validation, the µ values for the partition Case 0 is
taken as reference. For the partitions that do not meet
the centroid conditions, the values of µ1 and µ2 are
null. The response of the partitioning approach is
analyzed by classifying the contact events as ‘simple’
for sensors 1 and 2 and ‘multiple’ for sensors 3 and 4.
3.1 Single Contacts
Figure 4 shows the reconstruction cases when using
sensors 1 and 2. In the case of the sensor 1 (Figure
4(a)), the input data corresponds to a single Hertzian-
Partitioned Reconstruction of Contact Forces in Tactile Sensor Arrays for Robotic Sensing Systems
185
type contact event. As shown in Figure 3, for Case 1,
two subarrays (SA2 and SA4) do not meet the
centroid conditions, so their optimal parameters were
null. Figure 3 also shows that Case 2 do not fully
comply with the contact conditions. During the test
with sensor 1 and Case 3 forces are estimated in the
two subarrays taking into account that µ1 and µ2 are
different to zero. However, it would be noted that this
case present a high estimated error (64.41%) in the
Figure 3: Flow diagram for implementation of the
partitioning approach for the contact forces reconstruction.
resulting forces on the x-axis, while the reference
(Case 0) gives a maximum estimation error of about
13% for the tangential forces. The results obtained
allow verifying that the proposed partition strategy
does not work correctly in the case of single contact
and Hertzian events.
For sensor 2, the input data corresponds to a non-
Hertzian contact (Figure 4(b)). For Case 1, it is
observed that the centroid condition is not fulfilled in
subarray SA4. For partitions with two subarrays, the
estimation errors for Case 3 show a better
performance than Case 2. If Case 3 is compared with
the reference (Case 0), the first one present a smaller
error in the resultant force on the y-axis (1%).
However, for these cases the forces estimation error
with respect to the z-axis is better for Case 0 (-1% vs.
-7%). Since the non-Hertzian contact is a simple
contact located in the center of the sensor, the
centroid condition is fulfilled more easily than in the
Hertzian case.
a.
b.
Figure 4: Results of partitioned force reconstruction.
a) Hertzian contact Case 2, b) Non-Hertzian contact Case 3.
3.2 Multiple Contacts
Figure 5 and 6 present the results of applying some
cases of force reconstruction for sensors 3 and 4,
respectively. The input data used with sensor 3 (see
0,18
0
0,08
0
0,27
0
0,11
0,06
0,19
0,32
0,41
0,06
0
0,35
0,40
0,23
0,04
0,28
0,19
0,19
0,47
0,47
0,33
0,33
0,19
0,46
0,33
0,52
0,39
0,53
0,23
0,64
0,78
0,48
0,84
0,28
0,36
0
0,40
0
0,35
0
0,42
0,42
0,42
0,45
0,26
0,29
0
0,29
0,12
0,54
0,34
0,36
0,42
0,42
0,34
0,34
0,34
0,34
0,42
0,31
0,33
0,47
0,45
0,42
0,58
0,06
0,09
0,46
0,36
0,00 0,20 0,40 0,60 0,80 1,00
SA1
SA2
SA3
SA4
SA1
SA2
SA1
SA2
SA0
SA1
SA2
SA3
SA4
SA1
SA2
SA1
SA2
SA0
SA1
SA2
SA3
SA4
SA1
SA2
SA1
SA2
SA0
SA1
SA2
SA3
SA4
SA1
SA2
SA1
SA2
SA0
Case 1 Case 2 Case 3
Case
0 Case 1 Case 2 Case 3
Case
0 Case 1 Case 2 Case 3
Case
0 Case 1 Case 2 Case 3
Case
0
Sensor 1 Sensor 2 Sensor 3 Sensor 4
µ1 µ2
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
186
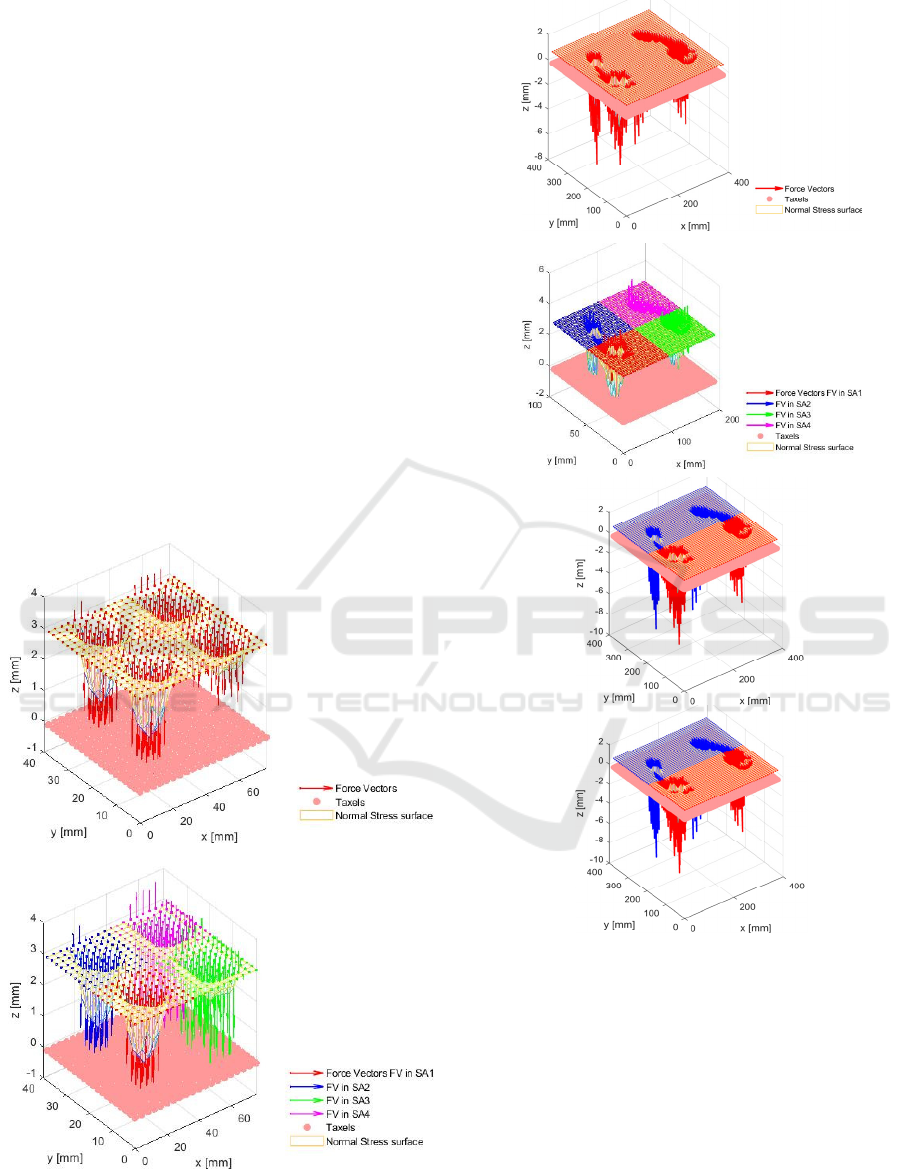
Figure 5) are combinations of two Hertian and non-
Hertzian contacts. Based on the estimation errors, the
input data for sensor 3 exhibits the best performance
for the partitioning approach. Although Case 1
fulfilled the centroid conditions for all partitions, the
errors given for Case 2 are lower, so Case 2 is the best
choice to be employed in the proposed approach with
the multiple Hertzian and non-Hertzian contact event.
Regarding the reconstruction of forces with
sensor 4 (see Figure 6), all the partition cases fulfilled
the centroid conditions. However, Case 3 present the
lowest estimation errors for the resulting force in the
z-axis (-4.25%), so this case is the best for the anlyzed
contact event with sensor 4. For this sensor, in each
case of analysis, the response times of the algorithm
were evaluated, obtaining the data presented in Figure
7. Executing the algorithm with one partition (Case 0)
requires 2705.33s, with two subarrays, Cases 2 and 3,
it takes 354.17s and 330.57s, respectively, while with
four subarrays (Case1) it only requires 109.63s.
Figure 7 also shows three tests for the same
partitioning case which generated similar response
times for each test.
Figure 5: Results of partitioned force reconstruction in
multiple contact events with Hertzian and non-Hertzian
events. Reconstruction cases a) Case 0. b) Case 1 (2×2).
Figure 6: Results of partitioned force reconstruction contact
events for a PPMs application. Reconstruction cases a)
Case 0 (1×1). b) Case 1 (2×2). c) Case 2 (1×2). d) Case 3
(2×1).
4 DISCUSSION AND FUTURE
WORKS
The model-driven on which this work is based was
designed to reconstruct single contact events.
Considering this limitation, it is not possible to
guarantee the proper functioning of the proposed
a.
b.
a.
b.
c.
d.
Partitioned Reconstruction of Contact Forces in Tactile Sensor Arrays for Robotic Sensing Systems
187

partition approach for single contact events. This is
because when dividing the sensor, it is not feasible to
ensure that each subarray meets the centroid
conditions since a single contact produces only one
tension centroid and one compression centroid for the
entire sensor.
Figure 7: Response time for partitioning approach with a
48×48 taxels sensor.
Even for single contact events, the non-Hertzian
contact analyzed had better behavior than the
Hertzian one, since the first one allowed the
partitioning of the sensor into two subarrays. This
implies that non-Hertzian contacts have a greater
expectation of being processed adequately with the
proposed approach.
Applying the proposed approach shows a great
decrease in the time required to rebuild the contact
forces when the number of subarrays increases. This
is because the order of operations in the matrix
decreases for smaller subarrays, which improves the
temporal response. For instance, for a 48×48 taxel
matrix, without partitions (Case 0), the algorithm
requires (3 * 48 * 48) × (6912) matrix operations.
For Case 1 with four subarrays, the algorithm requires
(3 * 24 * 24) × (1728) operations, while in Case 2 and
Case 3, the algorithm involves (3 * 24 * 48 = 3456)
operations. This means that, despite the relatively
high estimation errors obtained for this partitioning
approach, its application for large tactile sensor arrays
becomes attractive, since it significantly reduces the
number of operations required.
The latency of the FPGA-based hardware
implementation of the no partitioned model proposed
by Seminara et al. (2015) is 1.6 × 10
-6
s for processing
an 8 × 8 size sensor. For its part, the software
implementation developed herein for the above-
mentioned model has a response time of 16.43 s,
using the normal stress input data generated by
applying Equation 3 and an 8×8 size sensor.
This allows us to infer that given the reduction in the
number of operations required for the proposed
partitioning approach, the response times of the
hardware implementation are expected to be even
lower than those reported by Seminara et al.
In multiple contact events, sensor 3 produces a
good reconstruction of forces because this
configuration allows meeting the centroid conditions
for each analyzed subarray. This allows obtaining the
optimal parameters µ1 and µ2, which enables to use
of this approach to properly model these contacts.
Future works include evaluating the
reconstruction of single contact events for force
feedback using the proposed partitioning approach on
a hardware implementation considering applications
such as electronic skin, manipulation tasks, and
human-robot interaction.
5 CONCLUSIONS
The application of the proposed partitioning approach
for a 48×48 taxel tactile sensor matrix shows a very
significant decrease in the execution time, which goes
from 2705.33 s to 109.63 s only, when performing the
forces estimation using four subarrays of 24×24
taxels. The proposed partitioning approach to the
contact force reconstruction in arrays of tactile
sensors facilitates the decoding of the properties of
the touched objects by considerably reducing the
response time required to process the information
provided by large tactile sensor arrays.
The validation of the partitioning approach
depends on a prior verification of compliance with the
centers of traction and compression for each analyzed
subarray. Therefore, the proposed partition approach
generates high errors for single contacts, while it
presents tolerable errors for multiple contact events
distributed in the subarrays.
Due to its characteristics of low computing power
required and high execution speed, the proposed
approach can be used in applications of human-robot
interaction and force control loops in robotic
manipulation, in which it is tolerable to work with an
approximated knowledge of the properties of the
touched object.
ACKNOWLEDGEMENTS
Authors thank the valuable support and collaboration
of researchers of the COSMIC group at University of
Genoa, Genova-Italy, and the VIE-UPTC for
providing the funds to the international mobility to
the University of Genoa.
0 500 1000 1500 2000 2500 3000
Case 0
Case 2
Case 3
Case 1
Response time [s]
Partitioning cases
TEST 3 TEST 2 TEST 1
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
188

REFERENCES
Albert, A. (1972). Regression and the Moore-Penrose
Pseudoinverse.
Castro, F., Savaris, W., Araujo, R., Costa, A., Sanches, M.,
& Carvalho, A. de. (2020). Plantar Pressure
Measurement System With Improved Isolated Drive
Feedback Circuit and ANN: Development and
Characterization. IEEE Sensors Journal, 20(19),
11034–11043. https://doi.org/10.1109/JSEN.2020.299
8700
Cimino, D. (2016). Implementazione Hardware dedicata di
Metodi di Data Processing per la Ricostruzione della
Distribuzione di Forze di Contatto in Applicazioni
Tattili.
Ciotti, S., Sun, T., Battaglia, E., Bicchi, A., Liu, H., &
Bianchi, M. (2019). Soft tactile sensing: retrieving
force, torque and contact point information from
deformable surfaces. 2019 International Conference on
Robotics and Automation (ICRA), 4290–4296.
https://doi.org/10.1109/ICRA.2019.8794087
Cirillo, A., Ficuciello, F., Natale, C., Pirozzi, S., & Villani,
L. (2016). A Conformable Force/Tactile Skin for
Physical Human–Robot Interaction. IEEE Robotics and
Automation Letters, 1(1), 41–48. https://doi.org/
10.1109/LRA.2015.2505061
Dahiya, R. S., Metta, G., Valle, M., & Sandini, G. (2010).
Tactile Sensing—From Humans to Humanoids. IEEE
Transactions on Robotics, 26(1), 1–20.
https://doi.org/10.1109/TRO.2009.2033627
Dahiya, R. S., Mittendorfer, P., Valle, M., Cheng, G., &
Lumelsky, V. J. (2013). Directions Toward Effective
Utilization of Tactile Skin: A Review. IEEE Sensors
Journal, 13(11), 4121–4138. https://doi.org/10.1109/
JSEN.2013.2279056
Duong, L. Van, & Ho, V. A. (2021). Large-Scale Vision-
Based Tactile Sensing for Robot Links: Design,
Modeling, and Evaluation. IEEE Transactions on
Robotics, 37(2), 390–403. https://doi.org/10.1109/
TRO.2020.3031251
Ibrahim, A., Pinna, L., & Valle, M. (2017). Interface
Circuits Based on FPGA for Tactile Sensor Systems.
2017 New Generation of CAS (NGCAS), 37–40.
https://doi.org/10.1109/NGCAS.2017.60
Ito, D., Funabora, Y., Doki, S., & Doki, K. (2019). Control
System Based on Contact Force Distribution for
Wearable Robot with Tactile Sensor. 2019 IEEE/SICE
International Symposium on System Integration, SII
2019, 259–263. https://doi.org/10.1109/SII.2019.870
0383
Johnson, K. L. (1985). Contact Mechanics.
https://doi.org/DOI: 10.1017/CBO9781139171731
Lambeta, M., Chou, P.-W., Tian, S., Yang, B., Maloon, B.,
Most, V. R. Calandra, R. (2020). DIGIT: A Novel
Design for a Low-Cost Compact High-Resolution
Tactile Sensor with Application to In-Hand
Manipulation. IEEE Robotics and Automation Letters,
5
(3), 3838–3845. https://doi.org/10.1109/LRA.2020.29
77257
Li, X., Li, W., Zheng, Y., Althoefer, K., & Qi, P. (2020).
Criminisi algorithm applied to a gelsight fingertip
sensor for multi-modality perception. 2020
IEEE/ASME International Conference on Advanced
Intelligent Mechatronics, AIM 2020, 2020-July, 190–
195. https://doi.org/10.1109/AIM43001.2020.9158799
Li, Y., Wang, B., Li, Y., Zhang, B., Weng, L., Huang, W.,
& Liu, H. (2019). Design and Output Characteristics of
Magnetostrictive Tactile Sensor for Detecting Force
and Stiffness of Manipulated Objects. IEEE
Transactions on Industrial Informatics, 15(2), 1219–
1225. https://doi.org/10.1109/TII.2018.2862912
Masoumian, A., Montazer, M. C., Valls, D. P., Kazemi, P.,
& Rashwan, H. A. (2020). Using the Feedback of
Dynamic Active-Pixel Vision Sensor (Davis) to
Prevent Slip in Real Time. 6th International
Conference on Mechatronics and Robotics
Engineering, ICMRE 2020, 63–67. https://doi.org/
10.1109/ICMRE49073.2020.9065017
Mohammadi, A., Xu, Y., Tan, Y., Choong, P., & Oetomo,
D. (2019). Magnetic-based soft tactile sensors with
deformable continuous force transfer medium for
resolving contact locations in robotic grasping and
manipulation. Sensors (Switzerland), 19(22).
https://doi.org/10.3390/s19224925
Seminara, L., Capurro, M., & Valle, M. (2015). Tactile data
processing method for the reconstruction of contact
force distributions. MECHATRONICS, 27, 28–37.
https://doi.org/10.1016/j.mechatronics.2015.02.001
Trueeb, C., Sferrazza, C., & D’Andrea, R. (2020). Towards
vision-based robotic skins: A data-driven, multi-camera
tactile sensor. 3rd IEEE International Conference on
Soft Robotics, RoboSoft 2020, 333–338.
https://doi.org/10.1109/RoboSoft48309.2020.9116060
Wasko, W., Albini, A., Maiolino, P., Mastrogiovanni, F., &
Cannata, G. (2019). Contact Modelling and Tactile
Data Processing for Robot Skins. SENSORS, 19(4).
https://doi.org/10.3390/s19040814
XELA Robotics Inc. (n.d.). XELA Robotics | Sensing for
the future. Retrieved April 19, 2020, from
https://www.xelarobotics.com/index?lang=en
Yuan, W., Zhu, C., Owens, A., Srinivasan, M. A., &
Adelson, E. H. (2017). Shape-independent hardness
estimation using deep learning and a GelSight tactile
sensor. 2017 IEEE International Conference on
Robotics and Automation, ICRA 2017, 951–958.
https://doi.org/10.1109/ICRA.2017.7989116
Zou, L., Ge, C., Wang, Z. J., Cretu, E., & Li, X. (2017).
Novel Tactile Sensor Technology and Smart Tactile
Sensing Systems: A Review. SENSORS, 17(11).
https://doi.org/10.3390/s17112653
Partitioned Reconstruction of Contact Forces in Tactile Sensor Arrays for Robotic Sensing Systems
189
