
Manipulating Deformable Objects with a Dual-arm Robot
St
´
ephane Caro
1 a
, Christine Chevallereau
1 b
and Alberto Remus
2
1
Centre National de la Recherche Scientifique (CNRS), Laboratoire des Sciences du Num
´
erique de Nantes (LS2N),
44300 Nantes, France
2
´
Ecole Centrale de Nantes, 44300 Nantes, France
Keywords:
Deformable Models, Dual-arm Robot, Manipulation, Stability Analysis.
Abstract:
Competition in all sectors requires companies to be increasingly flexible to market changes and the assembly
industry is no exception. The impact of this work concerns aircraft production, as well as other fields. The
main focus is on modelling and control techniques to carry out assembly tasks involving deformable parts, by
exploiting a multi-robot system. Specifically, two robot arms are used to move a light and deformable part in
order to adapt its shape for an assembly operation. A vision system is used, assisted by markers. Furthermore,
the stability of the proposed controller is analyzed and experimental results are given.
1 INTRODUCTION
Assembly process is one of the cornerstones of in-
dustry because it allows to couple parts together
in order to get a sub-product or a finished product
(Marvel et al. (2018)). This work investigates the
added value brought by a robotic system composed
by robots, which have to cooperate in order to per-
form an assembly task involving deformable objects.
Manipulation of flexible objects has been consid-
ered in prior work with different control approaches
such as impedance control (Sun and Liu (1997))
and (Erhart and Hirche (2013)), force control (Sun
and Liu (2001)) or sliding mode control (Tavasoli
et al. (2009)). Visual approaches have also been
used in several studies (Smolen and Patriciu (2009)),
(Hirai and Wada (2000)),(Wada et al. (2001)) us-
ing a theoretical model of the object deformation
or with an adaptive model of deformation built on-
line (Navarro-Alarcon et al. (2016)). Here a visual
approach is investigated as well, but a constant model
of the beam deformation is used since the results
of stability analysis show that an adaptive model is
not required to manipulate the object at hand. Sev-
eral papers are dedicated to more compliant objects
such as tissues (Berenson (2013); Jia et al. (2018)).
Under some assumptions, many parts to be assem-
bled in industry can be modelled as planar flexible
beams (Bertelsmeier et al. (2017)) and this greatly
a
https://orcid.org/0000-0002-8736-7870
b
https://orcid.org/0000-0002-1929-5211
simplifies the modelling and control, which is com-
mon in industry like aircraft production (Al-Yahmadi
and Hsia (2007)). To reproduce an assembly task,
the work cell used in the framework of this research
work is endowed with a fixture coupled to a flexible
beam. A new modelling technique is presented based
on the elastic properties of the beam, which can be ex-
ploited to measure its deformation. The control aspect
and the use of vision are essential because of the un-
certainties in the flexible object modelling (Navarro-
Alarcon et al. (2016)).
Several robots cooperating and manipulating the
same object amount to a closed-loop mechanism with
a deformable beam. Such a system is under-actuated
due the infinite number of degrees of freedom induced
by the flexible beam. Here some key points are lo-
cated on the beam to ease the control of the over-
all system. Contrary to methods that use a phys-
ical model of the deformable object and its stable
equilibrium (Bretl and McCarthy (2014)),(Sintov et
al. (2020)), very simple deformation models adapted
to our control strategy will be used. Moreover, this
first-order model can be built experimentally based on
visual information.
The main contribution of this paper, essentially
methodological, lies in the use of the model estima-
tion for the motion control of a deformable beam and
the stability analysis of the proposed controlled law. It
should be noted that the proposed approach is based
on a classical position control available on all indus-
trial robots, and a high level loop based on vision
48
Caro, S., Chevallereau, C. and Remus, A.
Manipulating Deformable Objects with a Dual-arm Robot.
DOI: 10.5220/0010707600003061
In Proceedings of the 2nd International Conference on Robotics, Computer Vision and Intelligent Systems (ROBOVIS 2021), pages 48-56
ISBN: 978-989-758-537-1
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
feedback. The approach does not require force mea-
surement or force control. Besides, it is simpler than
the one introduced in (Navarro-Alarcon et al. (2016))
because it is based on a non-adaptive model and
defined from the desired object pose thanks to a
detailed stability analysis. Furthermore, it is well
suited to industrial applications and manipulation of
large objects, but less flexible than those considered
in (Navarro-Alarcon et al. (2016)) and (Lagneau et
al. (2020)).
The paper is organized as follows. Section 2
presents the experimental setup and its parameteriza-
tion. Section 3 introduces the kinematic sensitivity
Jacobian matrix associated with the beam shaping and
displacement in a plane. Section 4 describes the pro-
posed control law of the dual-arm robot and its per-
formance in terms of stability and accuracy. Finally,
conclusions are drawn in Section 5.
2 EXPERIMENTAL SETUP
The section describes the robotic cell and its main
components used in the framework of the research
work presented in the paper. Besides, a simplified
model of the multi-robot system and the four spaces
at stake used for its control are explained.
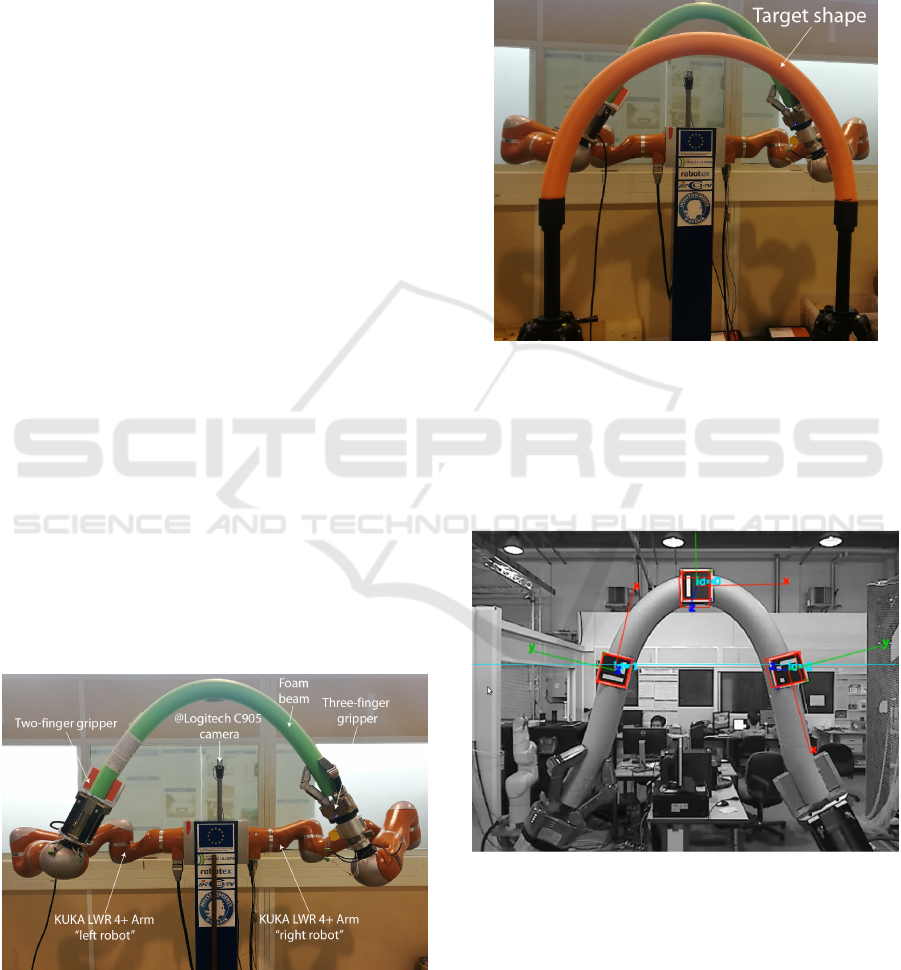
As shown in Figs. 1 and 2, the experimental setup
located at LS2N is composed of (i) two KUKA LWR
4+ 7-dof robotic arms, the left one being endowed
with a two-fingers gripper and the right one being
equipped with a three-fingers hand; (ii) one flexible
beam; (iii) one target, named target shape, for the
beam; (iv) one ®Logitech C905 camera, which is
used as a detection system to extract keypoints from
both the beam and the target shape.
Figure 1: A flexible beam grasped by two KUKA LWR 4+
7-dof robotic arms.
The two robots are position-based controlled.
Contrary to the geometric and kinematic models of
the robots, the model of the flexible beam is not
known beforehand. Therefore, a technique to obtain
this model is described in this paper based on some
ArUco Markers (Garrido-Jurado et al. (2014)) stuck
on the beam as illustrated in Fig. 3. The shape and
Figure 2: Target shape for the flexible beam.
position of the target shape are supposed to be still in
the workcell. Note that the flexible beam is initially
positioned by a human operator, due to the complexity
of the automatic detection and grasping of the flexible
beam.
Figure 3: Three ArUco Markers stuck on the flexible
beam and detected by a ®Logitech C905 camera through
OpenCV.
2.1 The Multi-robot System
The two serial robots and the flexible beam can be
seen as a planar closed-loop mechanism, which is in-
trinsically under-actuated due to the infinite number
Manipulating Deformable Objects with a Dual-arm Robot
49
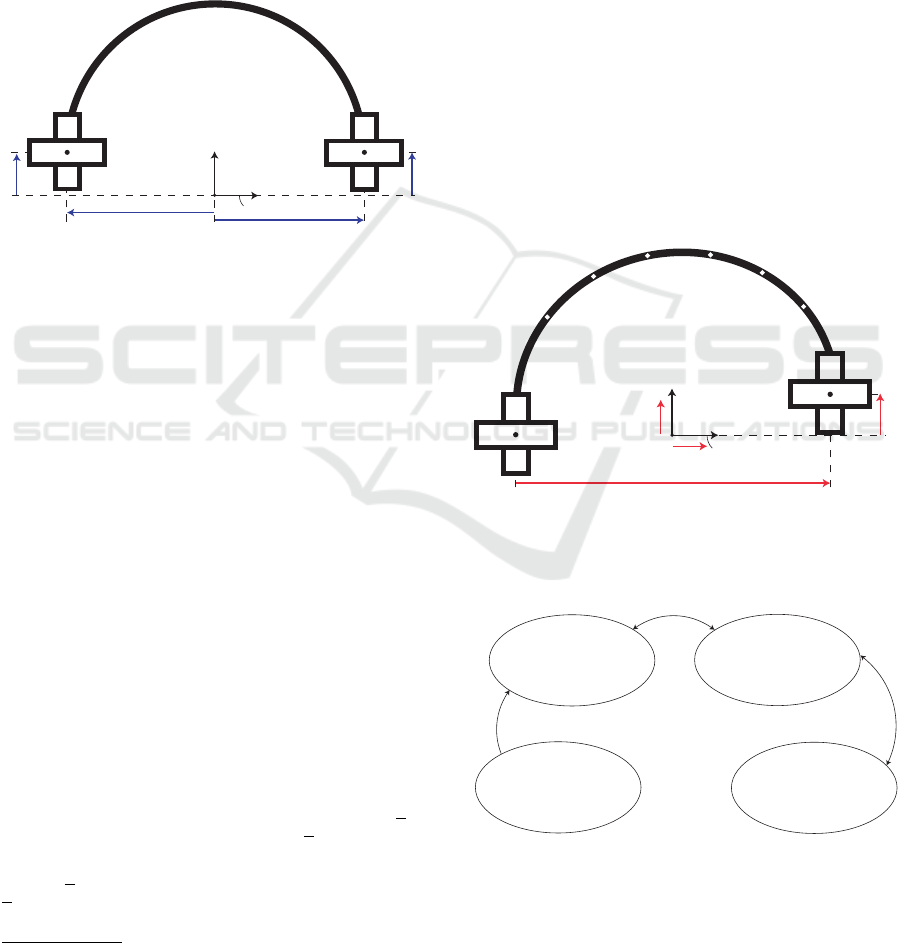
of degrees of freedom provided by the flexible beam
as depicted in Fig. 4. Without loss of generality, the
beam and its attachement points E
l
and E
r
with the
grippers are supposed to move in the plane passing
through point O and normal to x
b
, x
b
being normal
to both axes y
b
and z
b
. Thus, the beam does not
twist during its positioning and shaping in the base
frame F
b
of origin O and axes y
b
and z
b
. The planar
displacement of the left (right, resp.) robot is param-
eterized by the Cartesian coordinates y
l
and z
l
(y
r
and
z
r
, resp.) of point E
l
(E
r
, resp.) expressed in F
b
.
Left robot
Right robot
y
l
z
l
y
r
z
r
y
b
z
b
O
F
b
E
l
E
r
Figure 4: Planar closed-loop mechanism composed of a
flexible beam and two grippers.
The robots are assumed to behave like rigid sys-
tems with regard to the beam, the latter being much
more flexible. As a consequence, variables y
l
, z
l
,
y
r
and z
r
should be controlled to position and shape
the flexible beam in order to superimpose it the tar-
get shape for the beam shown in Fig. 2. Therefore,
a modelling and control strategy of the flexible beam
should first be developed based on the location of the
ArUco Markers expressed in F
b
and detected by the
®Logitech C905 camera.
2.2 Four Spaces
In order to reach its target shape shown in Fig. 2, the
flexible beam is deformed and displaced by the two
KUKA LWR 4+ 7-dof robotic arms, named left and
right robots respectively in what remains, endowed
with their own gripper as shown in Fig.1. It is note-
worthy that four spaces are at stake to deform and
move the beam in F
b
. Those four spaces are defined
as follows: (i) the robots joint space (R J S ) is the set
of robot revolute joint variables, namely,
R J S = {q = [... q
i j
.. .]
T
∈ R
14
: q
i j
≤ q
i j
≤ q
i j
,
i = l,r , j = 1,...,7} (1)
q
i j
and q
i j
being the lower and upper bounds of rev-
olute joint angle q
i j
and are given in
1
. l and r
1
https://www.kuka.com/en-de/products/robot-systems/
industrial-robots/lbr-iiwa
stand for the left and right robots, resp.; (ii) the end-
effector space (EES) is the set Cartesian coordinates
of points E
l
and E
r
expressed in F
b
satisfying the pla-
nar closed-loop shown in Fig. 4, namely,
EES = {p = [y
l
z
l
y
r
z
r
]
T
∈ R
4
:
(y
r
− y
l
)
2
+ (z
r
− z
l
)
2
≤ l
2
b
} (2)
l
b
being the length of the flexible beam; (iii) the de-
formation input space (DI S ) is the set of variables
associated to the positioning and shaping of the beam:
DI S = {u = [y
d
z
d
y
m
z
m
]
T
∈ R
4
: (5a)-(d) are satisfied}
(3)
variables y
d
, z
d
, y
m
, z
m
being depicted in Fig. 5;
(iv) the keypoint space (K S ) defines the location of
the ArUco Markers stuck on the flexible beam, i.e.,
K S = {x = [y
1
z
1
.. .y
N
z
N
]
T
∈ R
2N
} (4)
y
k
and z
k
being the Cartesian coordinates of key-
point P
k
expressed in F
b
, k = 1, .. .,N with N the num-
ber of keypoints as shown in Fig. 5.
Left robot
Right robot
y
d
z
d
y
m
z
m
y
b
z
b
O
F
b
P
1
(y
1
,z
1
)
P
2
(y
2
,z
2
)
P
k
(y
k
,z
k
)
P
N
(y
N
,z
N
)
E
l
E
r
Figure 5: Variables associated with DI S and K S .
The relationships between the four spaces are rep-
resented in Fig. 6.
Robots Joint Space
{q =[...q
ij
...]
T
∈ R
14
}
End-Effector Space
{p =[y
l
z
l
y
r
z
r
]
T
∈ R
4
}
Deformation Input Space
{u =[y
d
z
d
y
m
z
m
]
T
∈ R
4
}
Keypoint Space
{x =[y
1
z
1
...y
N
z
N
]
T
∈ R
2N
}
DGM
Eqs. (5a)-(d)
Flexible beam
sensitivity Jacobian
matrix – Eq. (6)
Figure 6: Relationship between the robots joint, end-
effector, deformation input and keypoint spaces.
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
50

3 BEAM DEFORMATION
The beam is displaced and shaped by controlling the
overall system in DI S. From Figs. 4 and 5, the vari-
ables y
m
, z
m
devoted to the positioning of the beam
in F
b
and the variables y
d
, z
d
related to its shaping
are defined as a function of Cartesian coordinates of
points E
l
and E
r
as follows:
y
d
= y
l
− y
r
(5a)
z
d
= z
l
− z
r
(5b)
y
m
= (y
l
+ y
r
)/2 (5c)
z
m
= (z
l
+ z
r
)/2 (5d)
It should be noted that the precision of the beam mod-
eling from the keypoint detection is a function of N.
The higher N, the better the precision. The maximum
number of keypoints to avoid an under-actuated sys-
tem is two. Indeed, if N = 2, the system will have as
many input variables as ouput variables. On the con-
trary, the number of input variables is lower than the
number of output variables, i.e., 2N, when N > 2. Fig-
ure 7 shows an example of a simulated under-actuated
system where with three keypoints are located both on
the beam and its target shape. Note that each keypoint
on the beam is assigned to its own keypoint on the tar-
get shape.
Figure 7: Three keypoints located both on the beam and its
target shape: the system is under-actuated.
3.1 Sensitivity Matrix
The variation δx in keypoint vector x, defined in (4),
can be expressed as a function of the variation δu in
input variable vector u, defined in (3), as follows:
δx = J(y
d
,z
d
)δu (6)
where J is a (2N × 4)-sensitivity Jacobian matrix, as
in (Caro et al. (2009)), taking the form:
J =
j
yd
j
zd
j
ym
j
zm
(7)
δy
m
and δz
m
correspond to a small displacement of the
whole beam, thus they affect the displacement of all
the keypoints with the same manner. However, they
do not affect the shape of the beam. Thus, the last two
columns j
ym
and j
zm
of matrix J are expressed as:
j
ym
=
1 0 1 0 .. . 1 0
T
(8)
j
zm
=
0 1 0 1 .. . 0 1
T
(9)
j
yd
and j
zd
are the first two columns of matrix J
and two 2N-dimensional vectors taking the form:
j
yd
=
.. . δy
k
/δy
d
δz
k
/δy
d
.. .
T
(10)
j
zd
=
.. . δy
k
/δz
d
δz
k
/δz
d
.. .
T
(11)
with k = 1,. .. ,N. δy
k
/δy
d
(δz
k
/δy
d
, resp.) denotes
the sensitivity of coordinate y
k
(z
k
, resp.) to varia-
tion δy
d
in variable y
d
. δy
k
/δz
d
(δz
k
/δz
d
, resp.) de-
notes the sensitivity of coordinate y
k
(z
k
, resp.) to
variation δz
d
in variable z
d
. Those sensitivity coef-
ficients are not a function of variables y
m
and z
m
.
The terms of the first two column vectors j
yd
and j
zd
of matrix J are identified either in simula-
tion as explained in Sec. 3.2 or experimentally as de-
scribed in Sec. 3.3 for a given shape of the beam,
i.e., for given y
d
and z
d
nominal values. The iden-
tification methodology aims at measuring the point-
displacements of keypoints P
k
, k = 1, .. ., N, namely,
the variations δy
k
and δz
k
in their Cartesian coordi-
nates for several small variations δy
d
and δz
d
.
3.2 Simulation
The robotic platform shown in Fig. 1 was simulated
thanks to Simscape Multibody
TM
and Simulink
TM
to
deal with modelling, control and visualization. The
beam was modeled based on the lumped parameters
method presented in (Miller et al. (2006)). The beam
was discretized in twelve mass unit, linked together
by revolutes joint endowed with a certain stiffness and
damping, whose parameters depend on the material
used. As far as the foam beam depicted in Fig. 1 is
concerned, its length l
b
and diameter d
b
are equal to
1.14 m and 0.064 m, respectively. The Young’s modu-
lus E and density ρ of the foam are equal to 0.005 GPa
and 50 kg/m
3
, respectively.
In what remains, three keypoints are supposed to
be equally spaced on the beam, i.e. N = 3, to match
with the three ArUco Markers shown in Fig. 3.
Figure 8 shows the variations δz
1
, δz
2
and δz
3
in the z-coordinates of points P
1
, P
2
and P
3
associ-
ated with small variations δy
d
as a function of y
d
, y
d
varying from 0.8 m to 1 m. It is apparent that the
higher y
d
, i.e., the larger the distance points E
l
and E
r
,
the more sensitive the z-coordinates of the keypoints
to small variations in y
d
. Besides, the z-coordinate of
the mid-keypoint P
2
is more sensitive to δy
d
than the
z-coordinates of the lateral keypoints P
1
and P
3
. The
Manipulating Deformable Objects with a Dual-arm Robot
51
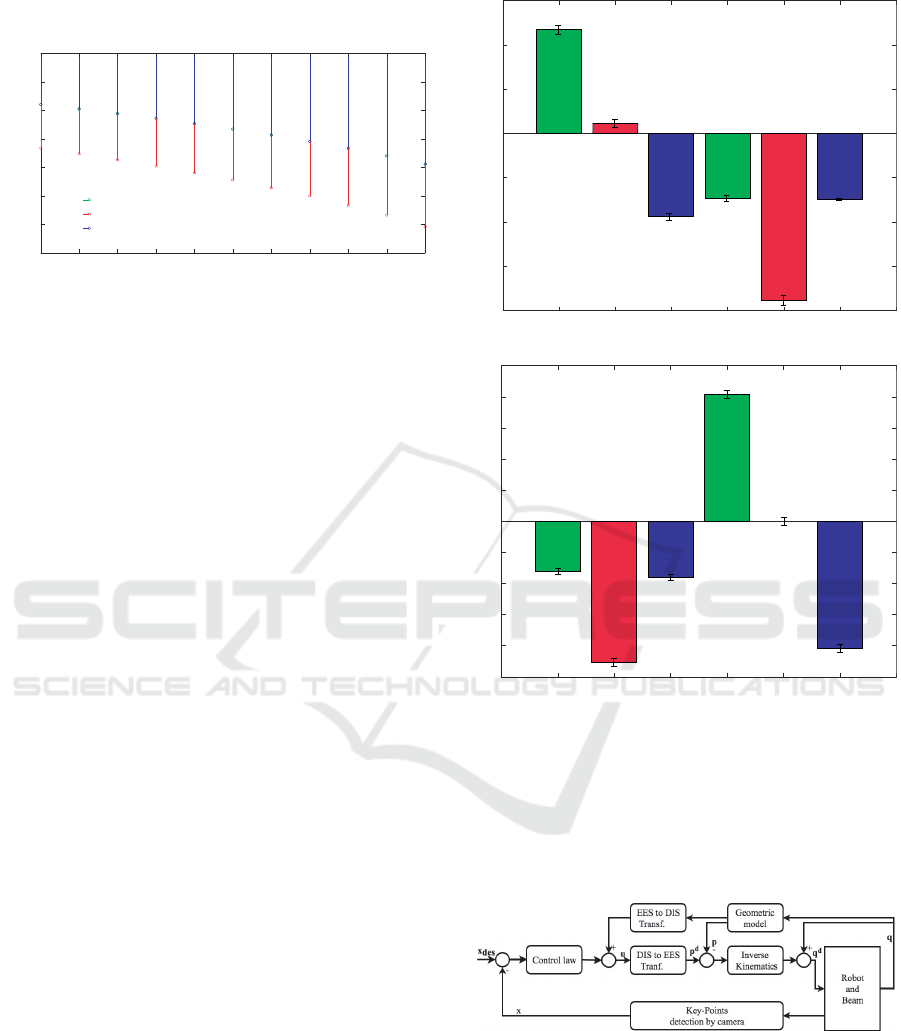
plots corresponding to P
1
and P
3
overlap because the
last two keypoints have the same sensitivity to δy
d
.
δz
1
/δy
d
δz
2
/δy
d
δz
3
/δy
d
0.82
0.86
0.9 0.94 0.98
-0.1
-0.2
-0.3
-0.4
-0.5
-0.6
-0.7
0
δz
k
/δy
d
[]
y
d
[m]
Figure 8: Sensitivity of the z-coordinates of keypoints P
1
,
P
2
and P
3
to small variations in y
d
obtained from simulation.
3.3 Experiments
As explained in Sec. 3.1, the terms of matrix J can
also be identified experimentally. Experiments were
carried out by gluing three ArUco Markers on the
foam beam as illustrated in Fig. 3 and by using a cal-
ibrated monocular camera to detect them. Robot Op-
erating System was used to control the robots.
Twenty tests were performed per set of y
d
and
z
d
nominal values to determine the mean and stan-
dard deviation of the sensitivity coefficients δy
k
/δy
d
,
δz
k
/δy
d
, δy
k
/δz
d
and δz
k
/δz
d
, k = 1,2,3. Figure 9
highlights the mean values of those coefficients for
y
d
= 0.8 m and z
d
= 0 m. Furthermore, Fig. 9 shows
the confidence intervals associated with the forego-
ing sensitivity coefficients and assessed experimen-
tally by considering the following sources of errors:
(i) camera calibration and placement errors; (ii) un-
certainties in the beam grasping; (iii) bad knowledge
of the beam characteristics; (iv) vibrations of the key-
points and slight scattering during trajectory execu-
tion.
It should be noted that the sensitiviy coefficients
identified experimentally differ slightly from the sim-
ulation results shown in Fig. 8. More confidence can
be given to experimental results because the confi-
dence intervals are quite small and the uncertainties in
the experimental setup and in the flexible beam model
are difficult to take into account in simulation.
4 CONTROL LAW
The objective of the control law is to bring the ArUco
Markers, i.e. the keypoints, stuck on the flexible
beam, as shown in Fig. 3, in front of the markers glued
on the target shape illustrated in Fig. 2. The closed
loop control law that defines the displacement of end-
δy
1
/δy
d
δy
2
/δy
d
δy
3
/δy
d
δz
1
/δy
d
δz
2
/δy
d
δz
3
/δy
d
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
(a)
δy
1
/δz
d
δy
2
/δz
d
δy
3
/δz
d
δz
1
/δz
d
δz
2
/δz
d
δz
3
/δz
d
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
0.4
(b)
Figure 9: Experimental mean values and confidence in-
tervals associated with the terms of (a) j
yd
and (b) j
zd
for
y
d
= 0.8 m and z
d
= 0 m.
effectors E
l
and E
r
in DI S is described in this section.
Then classical control of the robot is used with a low
level control in R J S as shown in Fig. 10.
(5)
(5)
Figure 10: Overall control scheme for position and shape
control.
The desired end-effector pose vector p is ex-
pressed from the deformation input vector u by
Eqs. (5a)-(d). Note that the KUKA LWR 4+ robotic
arm is kinematically redundant because it has seven
revolute joints. Therefore, the Moore-Penrose inverse
of the kinematic Jacobian matrix of each robotics
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
52

arm is used to compute δq, the variation in revolute
joint angle vector q as a function of a small displace-
ment δp of end-effectors E
l
and E
r
in F
b
. Then the
desired revolute joint angle vector q is deduced and
sent to the low level controller of the robot.
The control law used to define vector u is based on
visual servoing control in the task space (Chaumette
et al. (1991)). It should be noted that the sensitivity
Jacobian matrix (7) amounts to an interaction matrix.
From Eq. (7), the end-effector velocity
˙
x is expressed
as a function of the time derivative
˙
u of vector u as
follows:
˙
x = J
˙
u (12)
with x being defined in (4). Let x
des
denote the desired
keypoints coordinate vector expressed in F
b
. Thus,
the error e in K S takes the form:
e = x − x
des
(13)
The following equation should be met for e to de-
crease with an exponential rate:
˙
e = −λe (14)
with λ being a positive gain and
˙
e the time deriva-
tive of e. By substituting (13) into (14) and assuming
that x
des
is constant, we get:
˙
x = −λ(x − x
des
) (15)
Since the relation between x and u is not known,
it is estimated as,
˙
x =
ˆ
J
˙
u (16)
By combining (15) and (16) we obtain:
˙
u = −λ
ˆ
J
+
(x − x
des
) (17)
with
ˆ
J
+
being the Moore–Penrose inverse of the es-
timated sensitivity Jacobian matrix
ˆ
J. From (6), J is
a function of u. It means that several estimated ma-
trix
ˆ
J can be found. Here, the used estimated sen-
sitivity matrix named
ˆ
J
∗
is the matrix J assessed at
the final desired configuration u
d
of the beam, i.e., for
y
d
= 0.8 m and z
d
= 0 m. It will be shown in Sec. 4.2
that this choice is relevant in terms of control stability.
As a result, the control law is:
˙
u = −λ
ˆ
J
+
∗
(x − x
des
) (18)
Note that (18) provides a velocity in DI S whereas
the control law requires the variation δu. As a con-
sequence, a duration t
u
of motion is defined and the
control law becomes:
δu = −λt
u
ˆ
J
+
∗
(x − x
des
) (19)
Note that t
u
is about twenty times the sampling period,
the latter equals 5 ms, of the low level control of the
KUKA LWR 4+ robotic arms.
4.1 Stability Analysis
The stability analysis is useful to understand at first
glance the performance of the control law. First, a
Lyapunov function L based on the tracking error is
defined to study the stability:
L =
1
2
e
T
e (20)
The derivative of L is:
˙
L = e
T
˙
e (21)
Since the desired position and shape of the beam are
fixed, the evolution of the error
˙
e as function of the
control input can be expressed as:
˙
e =
˙
x = J(u)
˙
u (22)
With the proposed control law (18),
˙
e takes the form:
˙
e = −λJ(u)
ˆ
J
+
∗
e (23)
Using (23) in (21), we obtain
˙
L = −λe
T
J(u)
ˆ
J
+
∗
e (24)
If the matrix J(u)
ˆ
J
+
∗
is positive definite, the conver-
gence of e to zero will be insured. However this ma-
trix is a (2N × 2N)-matrix of rank ≤ 4. Thus this con-
dition cannot be met when N > 2.
It should be noted that if
ˆ
J
+
∗
e = 0, i.e., if x−x
des
is
in the kernel of
ˆ
J
+
∗
, then the
˙
u command will be null
and the error e will not be reduced but will remain
constant. Knowing that the final error cannot always
be null since N ≥ 3 control points are used for four
available commands only, the evolution of the error
projected in the image of
ˆ
J
+
∗
is studied. Accordingly,
a new four-dimensional error vector is defined as
follows:
=
ˆ
J
+
∗
e (25)
The evolution of can be deduced by time derivation
of (25), namely,
˙ =
ˆ
J
+
∗
˙
e (26)
since
ˆ
J
+
∗
is a constant matrix. Using (23), and (25), ˙
can be expressed as:
˙ = −λ
ˆ
J
+
∗
J(u) (27)
From (27), a sufficient condition to ensure the sys-
tem stability is the matrix
ˆ
J
+
∗
J(u) to be positive defi-
nite (Zake et al. (2019a); Zake et al. (2019b)). Since
ˆ
J
+
∗
J(u) may not be symmetric, its definite positive-
ness is analyzed based on the eigenvalues of its asso-
ciated symmetric matrix . As a result, a sufficient
condition to ensure the system stability becomes:
= 1/2(
ˆ
J
+
∗
J(u))
T
+ 1/2(
ˆ
J
+
∗
J(u)) > 0,∀t (28)
Manipulating Deformable Objects with a Dual-arm Robot
53
Indeed, if this condition is satisfied, the error ˙ will
always decrease to finally reach 0. The results on lo-
cal stability of the proposed control law are given in
Sec. 4.2.
As far as the final error is concerned, if the posi-
tion x
des
of the target markers and the position x of
the markers stuck the beam are such that moving one
of the robot end-effectors to reduce a distance for one
marker to its target leads to an increase of a distance
from another marker to its own target, the controller
will have better do nothing. From (6), only the error
x −x
des
that belongs to the image of J can be reduced
by the control input. The part of the error that is in
the kernel of J(u)
+
cannot be cancelled. Since the
proposed control law is built based on sensitivity ma-
trix J estimated at the expected final pose and shape
of the beam, it leads to the smallest final error.
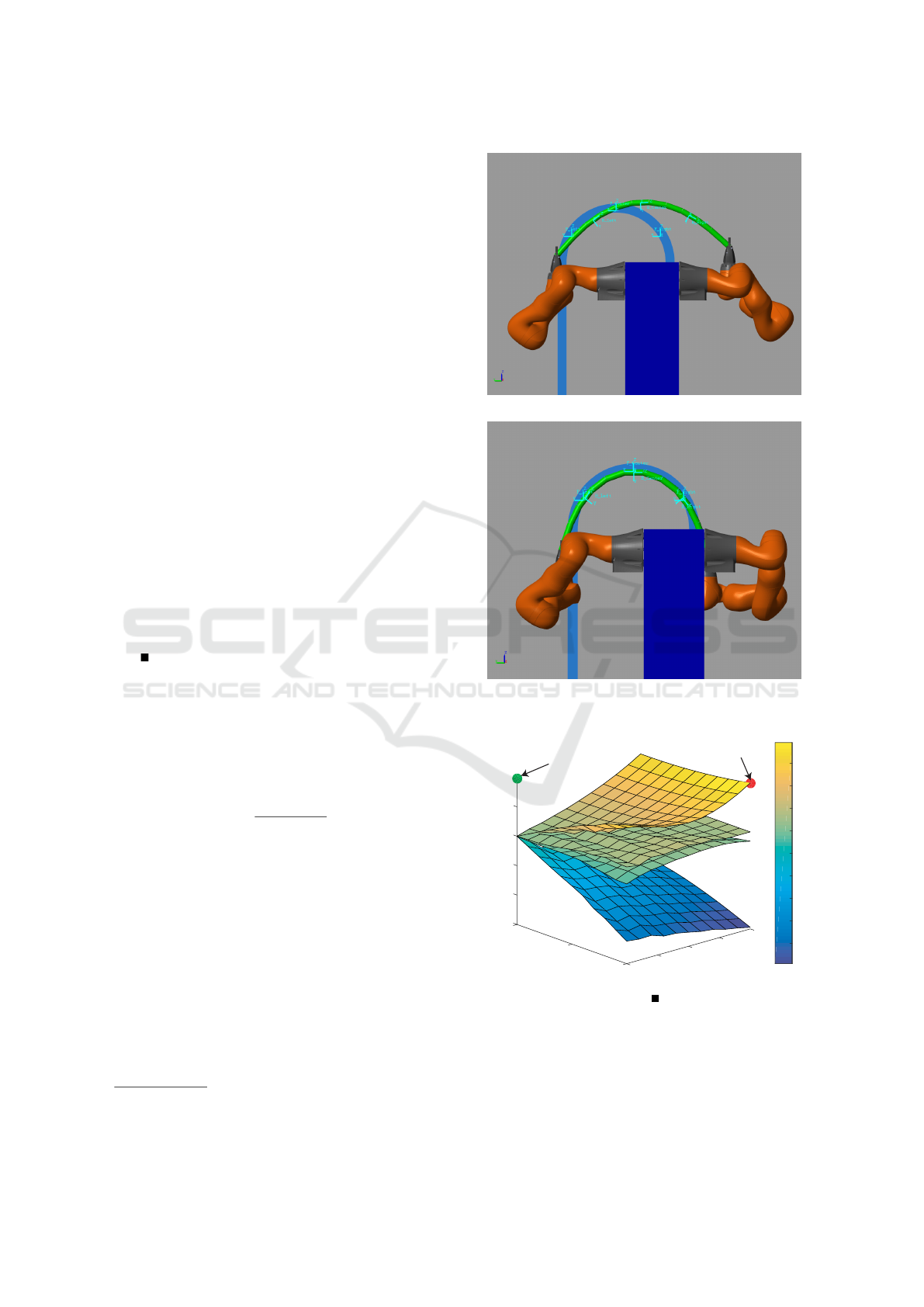
4.2 Simulation
The aforementioned method can be implemented by
means of Simscape Multibody
TM
and Simulink
TM
.
The control law minimizes the error between each
keypoint on the beam and its assigned marker on the
target shape as shown in Fig. 11 while considering
large position errors for the keypoints at the start con-
figuration.
Figure 12 shows that the four eigenvalues of ma-
trix are positive within the intervals 0.8 m < y
d
<
1 m and −0.2 m < z
d
< 0 m. From (28), the system
will be stable for any initial configuration (y
d0
,z
d0
)
taken in those intervals with the final configuration
(y
d f
,z
d f
) = (0.8 m,0 m).
In addition to stability analysis, the error ξ in K S
is considered as another performance index of control
law (18). ξ is the root-mean square error of the key-
point position:
ξ =
q
||x − x
des
||
2
/N (29)
Figure 13(a) shows the evolution of ξ with time
for the simulated system, N = 3. ξ decreases and sta-
bilizes at a small value as expected.
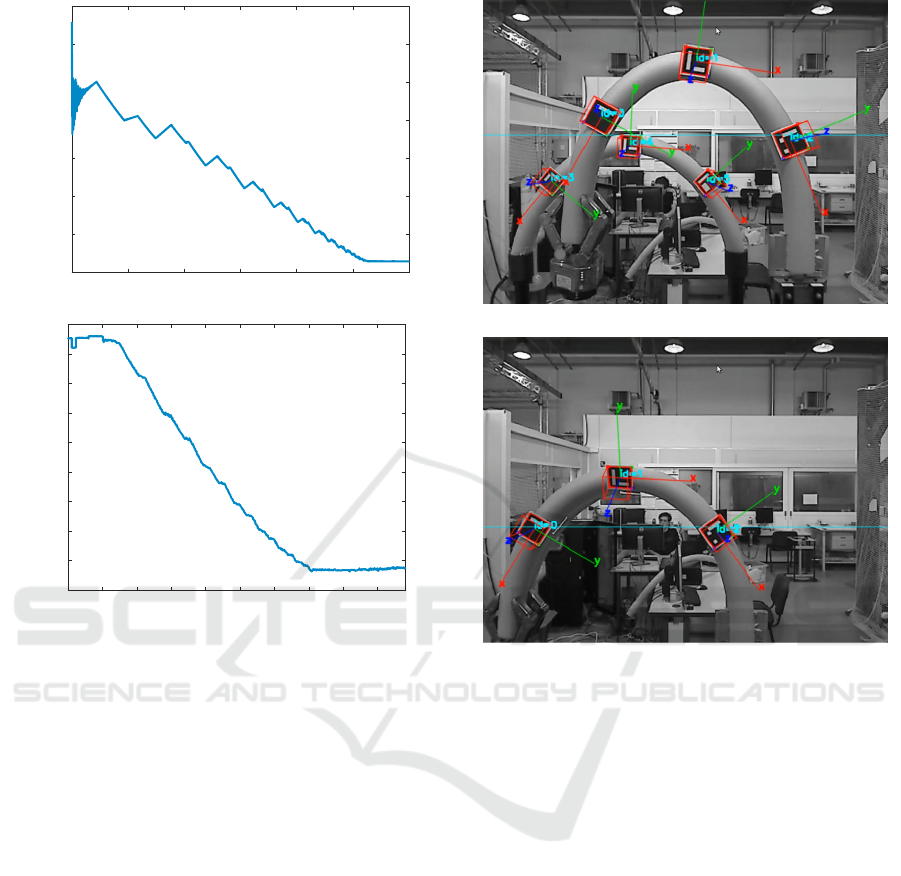
4.3 Experiments
Figure 14 and video
2
represent the task performed ex-
perimentally thanks to control law (18). The corre-
sponding values of ξ defined in (29) are depicted in
Fig. 13b. The experimental decrease of ξ is slower
than the simulated one because of the slow detection
of the ArUco markers by the low-cost camera used
and vibrations.
2
https://uncloud.univ-nantes.fr/index.php/s/
kZpNNAQ98PpBr9C
(a)
(b)
Figure 11: Start (a) and end (b) of the task in simulation.
0.7
0.8
0
0.9
1
1
1.1
0.95
1.2
-0.1
0.9
0.85
-0.2
0.8
0.75
0.8
0.85
0.9
0.95
1
1.05
1.1
1.15
z
d
[m]
y
d
[m]
Eigenvalues of Π
End config.
Start config.
Figure 12: The eigenvalues of as a function of y
d
and z
d
.
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
54
0
1
2
3
4
5
6
0.14
0.12
0.1
0.08
0.06
0.04
0.02
0
time [s]
ξ [m]
(a)
0
10
20
30
40
50
time [s]
0.18
0.16
0.14
0.12
0.1
0.08
0.06
0.04
0.02
0
ξ [m]
(b)
Figure 13: Root-mean square error of the keypoint position:
(a) simulation; (b) experiments.
5 CONCLUSIONS AND FUTURE
WORK
This paper dealt with a control law for manipulating
a flexible beam with a dual-arm robot. The approach
is characterized by the fact that a deformation model
of the object is not necessary since it is experimen-
tally constructed. This will be particularly useful if
the material is anisotropic or poorly identified. The
built model is adapted to the proposed control law be-
cause the elastic deformations induced by the beam
deformation provided by the robots are measured. A
fairly complete simulation study showed that it is pos-
sible to only use the deformation model of the flexible
object corresponding to its intended configuration for
manipulation by ensuring the stability of the control
through the whole task. Accordingly, an online esti-
mation as proposed in (Navarro-Alarcon et al. (2016))
is not required with the control approach presented in
this paper. Indeed an acceptable deformation model
of the beam is constructed experimentally. The contri-
bution of the paper is essentially methodological and
the results are illustrated with the planar deformation
(a)
(b)
Figure 14: Start (a) and end (b) of the task experimentally.
of a beam using markers. Later on, the proposed ap-
proach will be extended to the positioning, shaping
and assembling of three-dimensional flexible objects
with more than two robotic arms. The online detec-
tion of the beam deformation was performed thanks to
some markers as a proof of concept. Such a detection
can be extended by using points of interest extracted
from images.
REFERENCES
J. Marvel, R. Bostelman, and J. Falco, Multi-Robot As-
sembly Strategies and Metrics, ACM Comput Surv.,
vol. 51(1), 2018. doi: 10.1145/3150225.
D. Sun, Y.H. Liu, Modeling and impedance control of
a two-manipulator system handling a flexible beam,
ASME J. Dyn. Syst. Meas. Control, vol. 119, no. 4,
pp. 736-742, Dec. 1997.
S. Erhart, and S. Hirche, Adaptive force/velocity con-
trol for multi-robot cooperative manipulation un-
der uncertain kinematic parameters, Proceedings of
the IEEE/RSJ International Conference on Intelligent
Manipulating Deformable Objects with a Dual-arm Robot
55

Robots and Systems, pp. 307-314, Nov. 2013, doi:
10.1109/IROS.2013.6696369.
D. Sun, Y.H. Liu, Position and force tracking of a two-
manipulator system manipulating a flexible beam, J.
Robot. Syst., vol. 18, no. 4, pp. 197-212, March 2001.
S. Hirai, T. Wada, Indirect simultaneous positioning of de-
formable objects with multi-pinching fingers based on
an uncertain model, Robotica, vol. 18, no. 1, pp. 3–11,
Jan. 2000, doi: 10.1017/S0263574799002362.
A. Tavasoli, M. Eghtesad, and H. Jafarian, Two-time
scale control and observer design for trajectory track-
ing of two cooperating robot manipulators mov-
ing a fexible beam, Robotics and Autonomous
Systems, vol. 57, no. 2, pp. 212 - 221, 2009,
https://doi.org/10.1016/j.robot.2008.04.003.
J. Smolen and A. Patriciu, Deformation Planning for
Robotic Soft Tissue Manipulation, in 2009 Second
International Conferences on Advances in Computer-
Human Interactions, pp. 199–204, Feb. 2009.
T. Wada, S. Hirai, S. Kawarnura, and N. Karniji, Robust
manipulation of deformable objects by a simple PID
feedback, in Proc. IEEE International Conference on
Robotics and Automation (ICRA), pp. 85–90, 2001.
D. Navarro-Alarcon et al., Automatic 3-D Manipulation
of Soft Objects by Robotic Arms With an Adap-
tive Deformation Model, in IEEE Transactions on
Robotics, vol. 32, no. 2, pp. 429-441, April 2016, doi
: 10.1109/TRO.2016.2533639
D. Berenson, Manipulation of deformable objects with-
out modeling and simulating deformation, 2013
IEEE/RSJ International Conference on Intelligent
Robots and Systems, Tokyo, pp. 4525-4532, 2013.
doi: 10.1109/IROS.2013.6697007.
B. Jia, Z. Hu, J. Pan and D. Manocha, Manipulating
Highly Deformable Materials Using a Visual Feed-
back Dictionary, 2018 IEEE International Conference
on Robotics and Automation (ICRA), Brisbane, QLD,
pp. 239-246, 2018. doi: 10.1109/ICRA.2018.8461264
F. Bertelsmeier, T. Detert, T.
¨
Ubelh
¨
or, R. Schmitt and
B. Corves, Cooperating Robot Force Control for Posi-
tioning and Untwisting of Thin Walled Components,
Advances in Robotics and Automation, vol. 3, no. 6,
Nov. 2017, doi: 10.4172/2168-9695.1000179.
A.S. Al-Yahmadi, and T.C. Hsia, Modeling and Control of
Two Manipulators handling a Flexible Beam, Interna-
tional Journal of Electrical and Computer Engineer-
ing, vol. 1, no. 6, pp. 934-937, Nov. 2007.
S. Garrido-Jurado, R. Mu
˜
noz-Salinas, F.J. Madrid-Cuevas,
and M.J. Mar
`
ın-Jim
´
enez. 2014. Automatic generation
and detection of highly reliable fiducial markers under
occlusion. Pattern Recogn. vol. 47, no. 6, pp. 2280-
2292, June 2014. DOI=10.1016/j.patcog.2014.01.005
S. Caro, N. Binaud, and P. Wenger, Sensitivity Analy-
sis of 3-RPR Planar Parallel Manipulators, ASME
Journal of Mechanical Design, vol. 131, pp. 121005-
1–121005-13, 2009.
S. Miller et al., Technical Paper at Mathworks, Modeling
Flexible Bodies with Simscape Multibody Software,
2006.
F. Chaumette, P. Rives, and B. Espiau, Positioning of a
robot with respect to an object, tracking it and esti-
mating its velocity by visual servoing, Proceedings.
1991 IEEE International Conference on Robotics and
Automation, Sacramento, CA, USA, vol. 3, pp. 2248-
2253, 1991.
Z. Zake, F. Chaumette, N. Pedemonte, and S. Caro, Vision-
Based Control and Stability Analysis of a Cable-
Driven Parallel Robot, in the IEEE Robotics and Au-
tomation Letters (RA-L), vol. 4, no. 2, pp. 1029-1036,
2019
Z. Zake, S. Caro, A.S. Roos, F. Chaumette and N. Pede-
monte, Stability Analysis of Pose-Based Visual Servo-
ing Control of Cable-Driven Parallel Robots. In: Pott
A., Bruckmann T. (eds) Cable-Driven Parallel Robots.
CableCon 2019. Mechanisms and Machine Science,
vol. 74. Springer, Cham.
A. Sintov, S. Macenski, A. Borum, T. Bretl, Motion Plan-
ning for Dual-Arm Manipulation of Elastic Rods.
IEEE Robotics and Automation Letters, vol. 5, N° 4,
October 2020.
T. Bretl, Z. McCarthy, ”Quasi-static manipulation of a
Kirchhoff elastic rod based on a geometric analysis of
equilibrium configurations”, Int. J. Robot. Res., vol.
33, no. 1, pp. 48-68, 2014.
R. Lagneau, A. Krupa and M. Marchal, Automatic Shape
Control of Deformable Wires based on Model-
Free Visual Servoing. IEEE Robotics and Automa-
tion Letters, IEEE 2020, 5 (4), pp. 5252-5259.
10.1109/LRA.2020.3007114
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
56
