
On Provisioning Procedural Geometry Workloads on Edge Architectures
Ilir Murturi
1 a
, Chao Jia
2 b
, Bernhard Kerbl
2 c
, Michael Wimmer
2 d
, Schahram Dustdar
1 e
and Christos Tsigkanos
1 f
1
Distributed Systems Group, TU Wien, Vienna, Austria
2
Research Unit of Computer Graphics, TU Wien, Vienna, Austria
Keywords:
Edge Architectures, Computational Workloads, Edge-cloud Continuum.
Abstract:
Contemporary applications such as those within Augmented or Virtual Reality (AR/VR) pose challenges for
software architectures supporting them, which have to adhere to stringent latency, data transmission, and
performance requirements. This manifests in processing 3D models, whose 3D contents are increasingly gen-
erated procedurally rather than explicitly, resulting in computational workloads (i.e., perceived as Procedural
Geometry Workloads) with particular characteristics and resource requirements. Traditionally, executing such
workloads takes place in resource-rich environments such as the cloud. However, the massive amount of data
transfer, heterogeneous devices, and networks involved affect latency, which in turn causes low-quality visual-
ization in user-facing applications (e.g., AR/VR). To overcome such challenges, processing elements available
close to end users can be leveraged to generate 3D models instead, and as such the edge emerges as a central
architectural entity. This paper describes such procedural geometry workloads, their particular characteristics,
and challenges to execute them on heterogeneous devices. Furthermore, we propose an architecture capable
of provisioning procedural geometry workloads in edge scenarios.
1 INTRODUCTION
Contemporary applications such as those within Aug-
mented or Virtual Reality (AR/VR) demand dedicated
software architectures, able to cope with stringent la-
tency, data transmission, and performance require-
ments. Those challenge the traditional cloud-centric
view, where computation and data reside in power-
ful cloud servers, but away from user-facing appli-
cations which may have to further overlay sensory
information obtained near user’s locations. The key
computational functionality within AR/VR consists
of processing high-quality 3D models, whose 3D con-
tents are increasingly generated procedurally rather
than explicitly, resulting in computational workloads
with particular characteristics and resource require-
ments. Visualizing and representing 3D models is
a resource-intensive process that involves both mas-
sive data transfer to user clients (in terms of both
volume and velocity), as well as demanding compu-
tation, with latency perceived by end users being a
a
https://orcid.org/0000-0003-0240-3834
b
https://orcid.org/0000-0003-2304-5976
c
https://orcid.org/0000-0002-5168-8648
d
https://orcid.org/0000-0002-9370-2663
e
https://orcid.org/0000-0001-6872-8821
f
https://orcid.org/0000-0002-9493-3404
major concern. In recent years, one prominent ap-
proach that has emerged to overcome latency delays
especially in pervasive applications suggests utilizing
computation entities in proximity to end users. Edge
Computing is a distributed computing paradigm that
places resources (e.g., compute and storage) at the
edge of the network (Shi and Dustdar, 2016). Edge
resources (i.e., perceived as edge devices) are typi-
cally resource-constrained and heterogeneous devices
that can process, store, and analyze data and deliver
efficient and low-latency user-facing services. Such
edge devices can support applications by i) running
decision functions close to data-producing end users,
ii) processing computational workloads, and iii) min-
imizing the need to transmit data to the cloud.
Accurate digital architectural models are essential
to various practical applications such as urban plan-
ning (Vanegas et al., 2009), 3D navigation (Hilde-
brandt and Timm, 2014), natural and social phe-
nomena simulation (Heuveline et al., 2011; Jund
et al., 2012) in urban environments. Employing such
3D representations in contemporary near real-time
applications requires their abstraction or simplifica-
tion (Visconti et al., 2021) to avoid storage and trans-
mission of the sheer volume of geometric informa-
tion that they include. One way to improve the user-
perceived quality of these visual models without mas-
354
Murturi, I., Jia, C., Kerbl, B., Wimmer, M., Dustdar, S. and Tsigkanos, C.
On Provisioning Procedural Geometry Workloads on Edge Architectures.
DOI: 10.5220/0010687800003058
In Proceedings of the 17th International Conference on Web Information Systems and Technologies (WEBIST 2021), pages 354-359
ISBN: 978-989-758-536-4; ISSN: 2184-3252
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

sive storage overhead is to procedurally generate the
geometric data on the fly. Procedural modeling has
been well studied in the research area of computer
graphics and successfully applied in video games, the
movie industry, and AR/VR applications where com-
pelling and immersive virtual urban environments are
vital to the visual experience (Kim et al., 2018; M
¨
uller
et al., 2006). By recursively applying a set of rules
that represent spatial transformations on geometric
shapes, procedural modeling can generate highly de-
tailed geometry starting from a very basic primitive
shape called an axiom (e.g., a box or a quadrilateral).
For example, windows or doors on a wall can be cre-
ated by subdividing a rectangle and applying extru-
sion operations and different textures to the resulting
small rectangles. Analogously, details on windows or
doors can be generated with further subdivision, ex-
trusion, and texture mapping rules.
The expressiveness of procedural geometry allows
for a compact representation of complex 3D phys-
ical environments with minimal resources. More-
over, procedural geometry is highly flexible in that
the generation of geometric data can be tailored to
different requirements by controlling the set of rules
to be evaluated. Recently, efforts have also been
made to harness advances in parallel computing to
significantly speed up procedural geometry genera-
tion (Steinberger et al., 2014). These particular char-
acteristics enable the distribution of procedural geom-
etry workloads on a wide range of devices to raise
performance. Aside from data center-grade servers,
edge devices such as single-board computers (SBC)
equipped with low-cost processors and embedded
systems specialized in parallel processing can also be
leveraged for load balancing and latency reduction.
Edge-based infrastructures are heterogeneous and
dynamic environments consisting of various devices
featuring different capabilities; resources available
may differ in terms of computational capabilities (i.e.,
from low-powered devices to server-grade hosts).
Such heterogeneity poses several challenges from a
software architecture perspective when executing pro-
cedural geometry workloads since they have par-
ticular processing requirements and low-latency de-
mands. The key theme is that processing elements
close to end users can be leveraged to generate 3D
models, to avoid user-perceived latency. In this paper,
we identify the current trend towards distributed com-
puting for visualization tasks, describe such procedu-
ral geometry workloads, their particular characteris-
tics, and challenges to execute them. Furthermore, we
propose an architecture capable of provisioning pro-
cedural geometry workloads in edge settings. Finally,
we outline a research agenda.
2 PERVASIVE VISUALIZATION
With the arrival of ubiquitous network connectiv-
ity and affordable, consumer-grade smartphones and
tablets, 2D and 3D visualizations that depend on live
remote data (e.g., video streaming, games and sim-
ulations) have become available on mobile devices.
In many cases, the raw data that must be transferred
in real-time is either limited or can be sufficiently
compressed, and end-user devices are capable of de-
compressing and performing the necessary visualiza-
tion tasks themselves. However, the concept of the
thin client is progressively becoming more important
for high-end pervasive visualization: complex visual
applications (e.g., Triple-A games) increasingly rely
on cutting-edge or specialized hardware capabilities,
opening the door for cloud gaming services that re-
lieve end-user devices of these requirements. The es-
tablished capabilities for streaming video at high res-
olutions can be exploited to deliver visual content that
is entirely generated by dedicated cloud services, such
as NVIDIA’s GeForce Now, Microsoft’s XCloud or
Google’s Stadia. However, as has become evident
during the COVID-19 pandemic, constant streaming
of high-resolution image data takes a heavy toll on
the available internet infrastructure. With the immi-
nent availability of yet faster 5G connectivity (high
bandwidth, low latency, low range) in many areas,
the exploitation of edge nodes is a logical next step
to both improve user experience and relieve some of
the infrastructure stress. However, edge computing
is still a relatively young concept and in the process
of being developed. In contrast to cloud services,
performing visualization tasks with the help of edge
nodes enables a range of scheduling and distribution
strategies and encourages the development of special-
ized solutions for different use cases. Reasonable ap-
proaches that economize on the available resources
require careful analysis of the implied workloads and
the design of multi-tiered, dynamic architectures.
3 PROCEDURAL GEOMETRY AS
A COMPUTATIONAL
WORKLOAD
Online repositories such as Google Earth
1
or 3DC-
ityDB
2
provide 3D models for several metropolitan
cities. Those are particularly useful e.g., in navigation
applications that aim to assist end-users while roam-
ing inside a city. Unfortunately, the 3D representa-
1
Google Earth, https://www.google.com/earth
2
The CityGML Database, https://www.3dcitydb.org/
On Provisioning Procedural Geometry Workloads on Edge Architectures
355
tions of those architectural models used in everyday
applications are often oversimplified and lack in terms
of quality when requested in high-quality 3D due to
the high latency caused by network congestion. As
a result, applying the aforementioned methodologies
to applications like AR/VR may result in unexpected
user-perceived latencies. Thus, novel applications in
AR/VR require novel paradigms and software archi-
tectures to cope with demands on latency, resource
management, and computation requirements.
Cloud
275
o
E
2
E
3
E
4
E
1
Edge devices
2
Fog Node
Base station
275
o
E
5
Request
rendering
Result/Data
1
4
Users
Data
Exchange
Sensory data
Cloud Layer
Edge and Fog Layers
Subject Layer
Workload
Processing
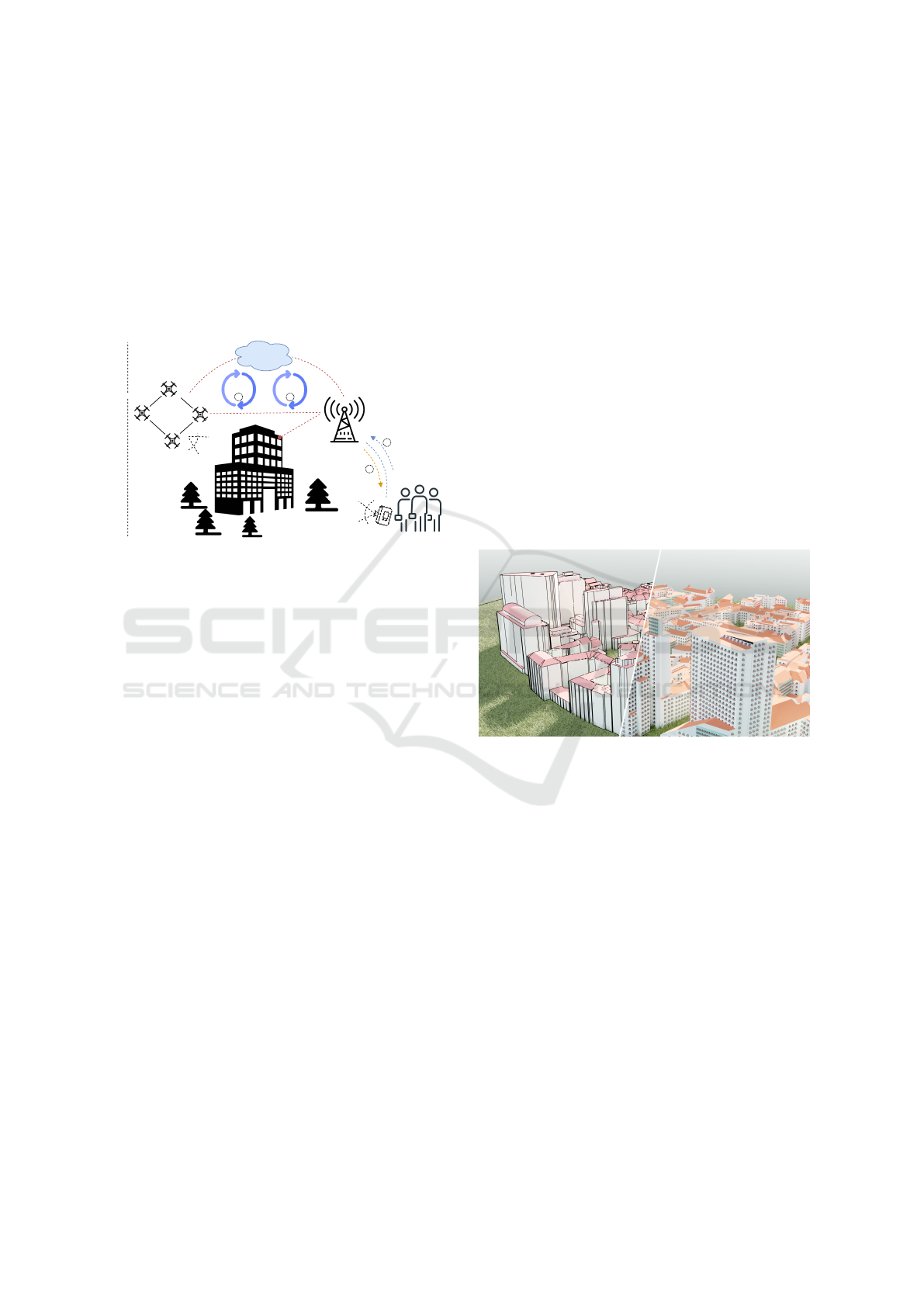
3
Figure 1: An example of an AR application reliant on high-
quality 3D data for use in civil engineering.
AR/VR applications are increasingly being pur-
sued in a plethora of fields ranging from gaming and
immersive tourism to industrial applications. Con-
sider for instance an AR application within civil en-
gineering (Figure 1), which, using CityGML models,
enables visualization of buildings by rendering them
into users’ smart devices such as smartphones, tablets,
or 3D glasses. Use cases may involve users such
as city inspectors roaming in the analyzing energy
infrastructure (i.e., heating or cooling) (Kaden and
Kolbe, 2014). In such a case, 3D visualization com-
bined with real-time sensor data (e.g., energy con-
sumption) enables users to perceive energy demands
for each building on their smart devices.
However, to enable the interaction with high-
quality 3D visualization on the users’ smart devices,
one must update the geometry of the observed build-
ing(s) as the user moves. Procedural geometry gener-
ation is an intensive process, while representing high-
quality 3D visualizations on the user’s smart device
at interactive rates demands fast processing and low
latency. To meet these demands, a user’s smart de-
vice should take advantage of available computing re-
sources in proximity (i.e., server-grade fog devices)
to find the most suitable place to execute geometry
workloads (1); this may take place in single-board
computers, in server-grade fog nodes in mobile base
stations, or in the cloud. After a computation request
is made, various data is exchanged between compu-
tation entities and system components (2-3) to decide
where to compute the workload as well as to provide
the resulting geometry to the user’s device (at the sub-
ject layer).
The ever-growing demand for high fidelity graph-
ics and visualization applications entails processing
enormous geometry data consisting of numerous tri-
angles; for instance, around 1 million triangles are re-
quired to model an area of 0.05 km
2
with a moderate
level of detail (LOD) near the center of the city of Vi-
enna, resulting in at least 30 MiB of raw mesh data. In
contrast, an analogous procedural generation of raw
mesh data requires less than 0.1 MiB in input param-
eters that define the position, dimension and orien-
tation of each axiom shape, as well as style param-
eters upon which detailed geometries can be gener-
ated. These style input parameters can for instance be
extracted from high-quality imagery (aerial or drive-
through) and applied on top of CityGML models in
which buildings are represented by simple boxes that
serve as a geometric baseline for the procedural gen-
eration (Figure 2).
Figure 2: Illustration of procedural generation workload.
Starting from a CityGML baseline model (left), detailed ge-
ometry is generated and delivered to the end user (right).
Given the amount of required raw mesh data, pro-
cedural generation workloads typically involve very
intensive computation. This manifests as a trade-off
for the full 3D data that would be equivalently trans-
ferred. The automatic generation of 3D data is con-
figurable; one may compute a certain level of detail
only, do so dynamically and depending on computa-
tion or time budgets. The (configurable) level of de-
tail emerges naturally as another factor subject to opti-
mization. Moreover, since geometric details for areas
far away from the current point of view of the user are
insignificant, their computation can be omitted, and
rule evaluation can be terminated at a lower LOD for
those buildings, thereby greatly eliminating unneces-
sary computation. Finally, the generated mesh data
for areas that are frequently requested by end users
can be cached and reused.
WEBIST 2021 - 17th International Conference on Web Information Systems and Technologies
356
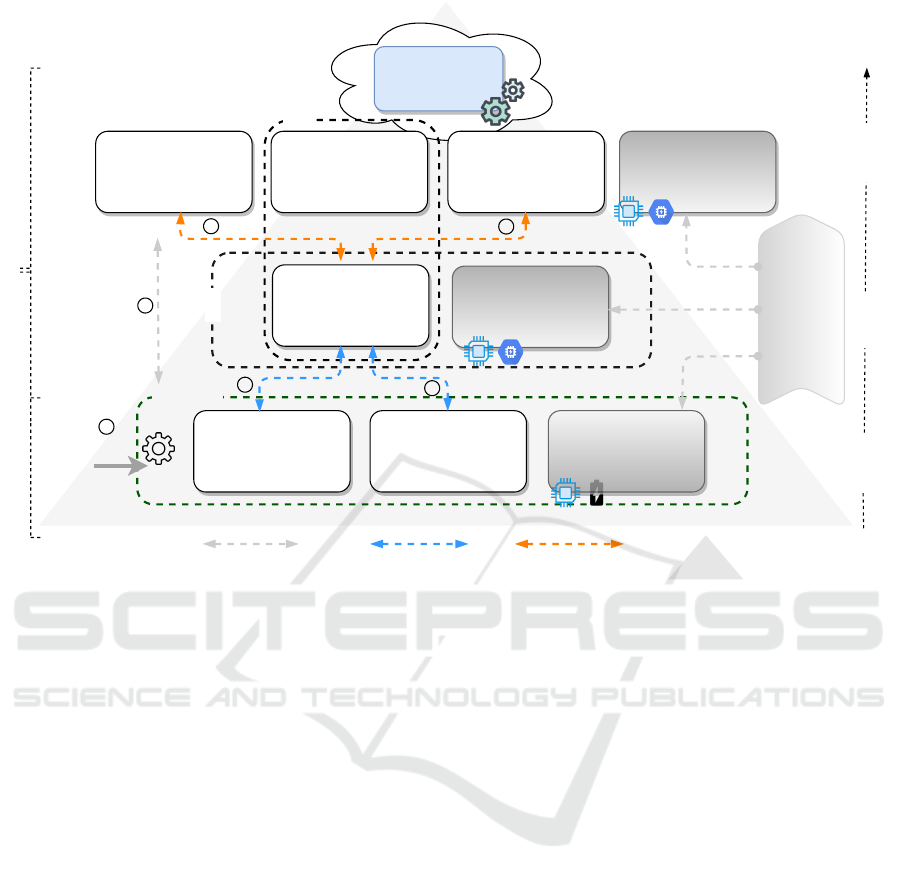
Runtime
Orchestration
PG Configuration
Management
Resource
Management
Workload
Processing
Smart City
3D Models
Procedural Geometry
Workload
GPU
CPU
5
4
Edge Layer
Latency (milliseconds)
< 30ms
< 5ms
< 10 ms
Legend:
4G / 5G network
connection
WAN
connection
Optional network
connection
Million of devices
Hundreds of devices
Adaptation
Management
Workload
Processing
PG Configuration
Manager
Monitoring
Workload
Processing
Edge Node
CPU Battery
Node
GPUCPU
Node
2
3
4
Request
1
Edge Layer
Edge
Application
Cloud Layer
Fog Layer
Figure 3: An overview of the proposed architecture and the interactions between layers.
4 SOFTWARE ARCHITECTURE
CONSIDERATIONS
Edge Computing is positioned as an important archi-
tectural layer between cloud and end users (Figure 1).
A platform for processing 3D models may leverage
the decentralized nature of such infrastructures, con-
sisting largely of three entities: first, the user that re-
quests 3D processing; second, the software compo-
nents that support finding the most suitable entity to
execute the procedural geometry workload and cope
with the dynamicity and uncertainty of the edge en-
vironment; and third, an orchestration layer, typically
located in the cloud and responsible for monitoring
the overall system and deployment of software com-
ponents in the Edge-Cloud infrastructure.
The cloud is a resource-rich environment and
provides advanced features for both service providers
and service consumers; thus, we advocate its role for
orchestration, performing 3D model generation, and
providing the required resource management. The
edge layer comprises devices placed in proximity
to end users with different characteristics and hard-
ware configurations, divided into sub-layers of i) fog
(i.e., powerful devices) and ii) edge (low-powered
devices).
The fog layer includes a set of stationary powerful
devices (i.e., physical or virtual) with different hard-
ware configurations (i.e., CPU, GPU, storage, etc.).
The role of the fog layer is interchangeable from exe-
cuting geometry workloads with low latency to an in-
termediary layer for managing, communicating, and
exchanging resources between different edge devices
and the cloud. In addition, fog devices may provide
storage for 3D models with different sizes (i.e., from
MB to GB). The edge layer consists of numerous de-
vices that can simultaneously request visualization;
those are usually resource-constrained devices (i.e.,
CPU-based and battery-powered) — however, often
with enough hardware capabilities to execute specific
geometry workloads (such as modern smartphones).
Figure 3 illustrates different architectural mani-
festations to execute procedural geometry workloads.
Edge applications operated by end users and hosted
on smart devices interact with other system compo-
nents deployed in the Edge-Cloud continuum. An
edge application internals view consists of three com-
ponents: i) procedural geometry configuration man-
ager, ii) monitoring, and iii) workload processing.
On Provisioning Procedural Geometry Workloads on Edge Architectures
357

The configuration manager enables users to express
their goals (e.g., visualizing based on the user’s lo-
cation and within a specified radius). Essentially, a
user configures spatial boundaries (i.e., a building or
a neighborhood), and the amount of detail desired to
represent the virtual world. The monitoring compo-
nent is responsible for observing internal hardware
resource states: i) internal hardware resources and
their utilization and ii) quality of the communication
link (i.e., status, latency, and bandwidth). The work-
load processing component is responsible for execut-
ing procedural geometry workloads (i.e., workloads
can be packaged into software containers within the
overall service-based architecture (Dustdar and Mur-
turi, 2021)). As illustrated in Figure 3, the process
starts (1) when a user expresses her goal via the edge
application. Then, the request with hardware infor-
mation is forwarded (2-3) to the adaptation manager
which interprets the goal and decides where to exe-
cute the workload.
The adaptation management component is respon-
sible for identifying devices needed to achieve a user
goal with the lowest possible latency. If the goal is
achievable on the user’s device, it forwards the re-
quired data to the host. If the goal is not achievable
locally, the adaptation component attempts to gener-
ate a deployment plan that maps the workload to other
available devices. As illustrated in Figure 3, procedu-
ral generation may occur in the cloud, fog, and edge
devices. To generate valid deployment plans, adapta-
tion must consider several factors such as device hard-
ware requirements, network metrics, and the time re-
quired to transfer (un)processed geometry. To gener-
ate optimal plans, the adaptation component requires
fine-grained information of the infrastructure (4).
The cloud part has a supportive role, which in-
cludes procedural geometry configuration manage-
ment, data storage (e.g., 3D models), resource man-
agement, geometry workload generation, and overall
orchestration. As illustrated in Figure 3, the user’s
request can be forwarded (5) directly to the cloud
as well if no other solution is feasible. The re-
source management component comprises a set of
functionalities from resource discovery (i.e., discov-
ering available edge devices) to context monitoring
(i.e., monitoring hardware infrastructure and updating
its status when changes occur). Orchestration entails
where the software components must be placed, aim-
ing for reliable and low-latency service to end users.
Recent developments in IoT-based systems have
shown that systems can be engineered, deployed, and
executed in Edge-Cloud infrastructures (Alkhabbas
et al., 2020). At the same time, software components
can easily self-adapt to dynamic changes in their de-
ployment topologies when the quality of their services
is degraded (Brogi et al., 2020). Finally, as shown
in Figure 3, software components can be placed on
different devices yielding different deployment con-
figurations. More specifically, software components
that face high requests from a particular region can
be placed in proximity to the end-users. For in-
stance, if the procedural geometry generation for a
particular city area occurs mostly on the user devices,
then the orchestration mechanism must instantiate the
data storage component with associated data (i.e., 3D
models) on the nearest fog devices to the users. As a
result, data can be forwarded faster to the end-users
from the edge layer rather than from the cloud via
WAN connection.
5 AN EMERGING RESEARCH
AGENDA
Satisfying the dynamic and stringent requirements of
contemporary applications such as those in AR/VR is
challenging for centralized cloud-based systems. Pro-
cessing 3D models and transferring vast amounts of
data to user-facing devices over the internet incur la-
tencies and result in user experience degradation. We
discussed aspects emerging from latency and compu-
tation requirements and how edge architectures can
address the requirements and support procedural ge-
ometry workloads. Thus, we sketched an architecture
capable of provisioning such workloads in edge com-
puting scenarios.
As future work, we aim at providing a complete
technical framework for the processing of geome-
try workloads on edge-based architectures; this in-
cludes both technical and architectural aspects. En-
capsulating procedural generation appropriately such
as it being able to execute on heterogeneous hardware
platforms is a challenging task, as such workloads
are required to take advantage of specialized hard-
ware (such as GPUs) when available, yielding dif-
ferent configurations. Subsequently, our vision en-
tails them to be containerized, such that a service-
based architecture emerges across the device-to-cloud
continuum. Performance aspects of different geome-
try workloads executed on state-of-the-art resource-
constrained and powerful devices need to be care-
fully considered. Besides that, assessing deployment
tradeoffs in terms of quality, performance, and cost
is highly desired. Regarding deployment, the edge
topology may not be static, and components may need
to be scaled or migrated to comply with other con-
straints like energy, latency, or device movement, in-
troducing dynamicity. Finally, we identify three main
WEBIST 2021 - 17th International Conference on Web Information Systems and Technologies
358

research challenges that must be further investigated
in the future:
• Procedural Geometry Workload Configura-
tion. A platform for the described scenarios needs
to hide operational complexity from application
end users and developers. In particular, devel-
opers should be able to express in a high-level
way the context in which particular procedural ge-
ometry executions are allowed to run. Thus, a
novel domain-specific language (DSL) for spec-
ifying the high-level constraints such as Quality
of Service (QoS) and hardware requirements re-
mains a critical task.
• Resource Discovery across the Edge-cloud
Continuum. A fundamental aspect in described
scenarios is discovering resources such as edge
devices or IoT resources (e.g., sensors, actuators,
etc.) as they become available in the city’s envi-
ronment (Murturi and Dustdar, 2021). Thus, re-
source discovery in heterogeneous and dynamic
edge-based settings remain among the main re-
search challenges.
• Resilient Geometry Workload Runtime. The
end users and edge devices providing computa-
tional resources can be mostly mobile. As a result,
preserving optimal QoS in the face of client or
resource mobility is another prominent research
challenge that needs to be addressed in the future.
ACKNOWLEDGMENT
Research supported in part by the Research Cluster
“Smart Communities and Technologies (Smart CT)”
at TU Wien, the EU’s Horizon 2020 Research and
Innovation Programme under grant agreement No.
871525 and by Austrian Science Foundation’s (FWF)
project M 2778-N “EDENSPACE”.
REFERENCES
Alkhabbas, F., Murturi, I., Spalazzese, R., Davidsson, P.,
and Dustdar, S. (2020). A goal-driven approach for
deploying self-adaptive iot systems. In 2020 IEEE
International Conference on Software Architecture
(ICSA), pages 146–156. IEEE.
Brogi, A., Forti, S., Guerrero, C., and Lera, I. (2020). How
to place your apps in the fog: State of the art and
open challenges. Software: Practice and Experience,
50(5):719–740.
Dustdar, S. and Murturi, I. (2021). Towards IoT Processes
on the Edge, pages 167–178. Springer International
Publishing, Cham.
Heuveline, V., Ritterbusch, S., and Ronnas, S. (2011).
Augmented reality for urban simulation visualization.
Preprint Series of the Engineering Mathematics and
Computing Lab, (16).
Hildebrandt, D. and Timm, R. (2014). An assisting, con-
strained 3d navigation technique for multiscale virtual
3d city models. GeoInformatica, 18(3):537–567.
Jund, T., Kraemer, P., and Cazier, D. (2012). A unified
structure for crowd simulation. Comput. Animat. Vir-
tual Worlds, 23(3-4):311–320.
Kaden, R. and Kolbe, T. H. (2014). Simulation-based total
energy demand estimation of buildings using semantic
3d city models. International Journal of 3-D Informa-
tion Modeling (IJ3DIM), 3(2):35–53.
Kim, J., Kavak, H., and Crooks, A. (2018). Procedural city
generation beyond game development. ACM SIGSPA-
TIAL Special, 10(2):34–41.
M
¨
uller, P., Wonka, P., Haegler, S., Ulmer, A., and Gool,
L. V. (2006). Procedural modeling of buildings. ACM
Trans. Graph., 25(3):614–623.
Murturi, I. and Dustdar, S. (2021). A decentralized ap-
proach for resource discovery using metadata replica-
tion in edge networks. IEEE Transactions on Services
Computing.
Shi, W. and Dustdar, S. (2016). The promise of edge com-
puting. Computer, 49(5):78–81.
Steinberger, M., Kenzel, M., Kainz, B., M
¨
uller, J., Wonka,
P., and Schmalstieg, D. (2014). Parallel generation
of architecture on the GPU. Comput. Graph. Forum,
33(2):73–82.
Vanegas, C. A., Aliaga, D. G., Benes, B., and Waddell,
P. (2009). Interactive design of urban spaces using
geometrical and behavioral modeling. ACM Trans.
Graph., 28(5):111.
Visconti, E., Tsigkanos, C., Hu, Z., and Ghezzi, C. (2021).
Model-driven engineering city spaces via bidirec-
tional model transformations. Software and Systems
Modeling, pages 1–20.
On Provisioning Procedural Geometry Workloads on Edge Architectures
359
