
POOF: Efficient Goalie Pose Annotation using Optical Flow
Brennan Gebotys, Alexander Wong and David Clausi
Systems Design Engineering, University of Waterloo, Waterloo, Canada
Keywords:
Computer Vision, Neural Networks, Pose Estimation, Optical Flow, Annotation.
Abstract:
Due to the wide range of applications for human pose estimation including sports analytics and more, research
has optimized pose estimation models to achieve high accuracies when trained on large human pose datasets.
However, applying these learned models to datasets that are from a different domain (which is usually the
goal for many real-world applications) usually leads to a large decrease in accuracy which is not acceptable.
To achieve acceptable results, a large number of annotations is still required which can be very expensive. In
this research, we leverage the fact that many pose estimation datasets are derived from individual frames of
a video and use this information to develop and implement an efficient pose annotation method. Our method
uses the temporal motion between frames of a video to propagate ground truth keypoints across neighbouring
frames to generate more annotations to provide efficient POse annotation using Optical Flow (POOF). We find
POOF achieves the best performance when used in different domains than the pretrained domain. We show
that in the case of a real-world hockey dataset, using POOF can achieve 75% accuracy (a +15% improvement,
compared to using COCO-pretrained weights) with a very small number of ground truth annotations.
1 INTRODUCTION
There are numerous applications for human pose es-
timation including sports analytics, sign language
recognition and more. Specifically, in sports analyt-
ics for hockey, extracting accurate poses can lead to
greater insight into players performance including the
player’s form (e.g, skating with or without the correct
form), classification of specific actions (e.g, slapshot,
wrist shot, etc.), and the quantification of the proba-
bility of scoring (or probability of saving a shot, in
the goalie’s case). These insights can then be used to
improve the team or help develop a plan against an
upcoming opponent.
Because of the wide range of applications, pose
estimation models have been researched extensively
(Li et al., 2019; Newell et al., 2016; Lin et al.,
2014). This research has resulted in most pose es-
timation models achieving high accuracies when they
are trained on large datasets. However, when transfer-
ring these learned models to other visually different
datasets (which is the case for many real-world appli-
cations), usually, the model accuracy significantly de-
creases and leads to unsatisfactory results. To obtain
satisfactory results, large amounts of labelled pose
data from the new dataset are still required. However,
for some labs/companies, this is not possible due to
Figure 1: An example of a predicted goalie pose from the
NHL goalie dataset used throughout the experiments.
resource and time constraints. This leads to the prob-
lem of performing sufficiently accurate pose estima-
tion with only a small number of annotations.
A common theme of human pose datasets is that
each example is a frame that has been extracted
and annotated from a corresponding video. In this
research, we leverage the inherent motion found
in videos and use optical flow estimation between
frames to propagate annotations from one frame to
its neighbouring frames. Doing so results in a mul-
tiplicative increase in pose annotations with no addi-
tional cost. We call this method, POOF (POse anno-
tation using Optical Flow).
116
Gebotys, B., Wong, A. and Clausi, D.
POOF: Efficient Goalie Pose Annotation using Optical Flow.
DOI: 10.5220/0010657000003059
In Proceedings of the 9th International Conference on Sport Sciences Research and Technology Support (icSPORTS 2021), pages 116-122
ISBN: 978-989-758-539-5; ISSN: 2184-3201
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

To investigate POOFs performance, we run ex-
tensive experimental studies on an NHL (National
Hockey League) goalie-pose dataset which contains
many similar features to real-world datasets includ-
ing but not limited to: dataset-specific poses which
are not common in the large datasets, joint occlusions
caused by hockey players skating in front of the cam-
era, and image blurriness caused from camera move-
ment. Also, to further investigate how POOF gener-
alizes in other settings, we perform ablation studies
across a variety of pretrained weights and hyperpa-
rameters.
2 RELATED WORK
In this section, we describe research that investigates
how to perform pose estimation with a small number
of examples and how the research relates to POOF.
The research solutions can be generally described as
either improving the annotation generation (similar to
POOF) or modifying the model directly.
(Neverova et al., 2019) used motion to extend key-
points to neighbouring frames for dense keypoint es-
timation. We extend this work by applying it to pose
estimation and investigate the performance on out-of-
domain and smaller datasets where POOF is deter-
mined to perform effectively. Furthermore, we show
POOF can lead to improved performance up to a ra-
dius of 10 frames whereas (Neverova et al., 2019)
only investigated using a radius of 3 frames. We find
this results in more than triple the number of labels
and further improved performance.
Rather than optimize the annotations, (Bertasius
et al., 2019) used a semi-supervised approach to learn
a model from sparse video annotations. However,
their approach requires annotations between every n-
th frame in a video (in their paper they used every
7-th frame), which our approach doesn’t require. By
removing this requirement our method significantly
reduces the number of annotations required.
(Romero et al., 2015) showed that it’s possible to
predict keypoints using only optical flow and Kalman
filters, without any ground truth labels. We further
extend this research by incorporating a small num-
ber of annotations that we believe are easy to col-
lect. Instead of using motion information, (Charles
et al., 2016) used visual features to propagate key-
points across neighbouring frames.
Pose estimation and optical flow have also been
shown to be very complementary. (Pfister et al., 2015)
developed a model which takes multiple frames and
optical flow estimation as input and showed an im-
provement in pose estimation accuracy. (Zhang et al.,
2018) used pose estimation to improve the represen-
tation of motion estimation for humans.
Rather than propagate keypoints, another way to
generate more annotations is to use synthetically gen-
erate data. (Doersch and Zisserman, 2019) found
that pasting generated humans in specific augmented
poses across a variety of background images can lead
to improved generalization performance for 3D pose
estimation. (Hinterstoisser et al., 2019) used a simi-
lar approach for object detection and found improved
performance. However, these techniques usually re-
quire additional data to get working (e.g, segmenta-
tion information of the poses to be able to paste on
different backgrounds) which can be costly.
3 METHODOLOGY
Before describing the methodology we first define a
few terms. We define a hyperparameter, R, as the
number of frames before and after the ground truth
annotation to which the keypoints will be propagated.
We define K
t
as a vector of x-y coordinates represent-
ing keypoints in the t-th frame.
We define M
i, j
as the optical flow estimation be-
tween the i-th and j-th frame represented as a A ×
B × 2 matrix where A × B is the size of each frame.
The coordinates (k, l) are referenced in M
i, j
using
M
i, j,(k,l)
, which represents how the pixels of the i-th
frame at coordinates (k, l) moved to the j-th frame in
terms of a change in the x and y coordinates.
The first step of our method requires collecting
ground truth annotations across a video. We aim
to have diverse annotations which cover a variety of
poses that are temporally far apart from each other.
Ideally, we want to select annotations that are at least
2 × R frames apart. This is because when we prop-
agate the ground truth keypoints to the nearest R
frames, if the ground truth keypoints frames are 2× R
apart, there will be no overlap in predictions and we
will maximize the amount of annotated data created.
For each ground truth annotation at time t, K
t
, we
use an optical flow estimation model to predict the
motion between consecutive frames to obtain M
t,t+1
∀t ∈ [t − R, t +R − 1].
We then predict the keypoints which surround the
ground truth annotation frame, K
t−1
and K
t+1
, using
the annotated keypoints K
t
and the motion between
the frames, M
t−1,t
and M
t,t+1
, as follows:
K
t−1
= K
t
− M
t−1,t,K
t
(1)
K
t+1
= K
t
+ M
t,t+1,K
t
(2)
POOF: Efficient Goalie Pose Annotation using Optical Flow
117

Figure 2: Visual description of the POOF method for R = 3. The annotated keypoints (shown in red) are propogated to
annotate the surrounding frame’s keypoints (shown in gold) using the optical flow between consecutive frames (images in the
top row).
where M
t,t+1,K
t
is M
t,t+1
indexed at the coordinates of
K
t
.
We repeat equation 1 ∀t ∈ [t − R, t) and equation 2
∀t ∈ (t, t + R] to obtain keypoints ∀t ∈ [t − R, t + R].
Figure 2 shows a visual description of POOF for
R = 3. First, the optical flow is computed between
consecutive frames (images in the top row). The
ground truth annotated keypoint at time t (shown in
red) is then propagated to annotate the keypoints for
its neighbouring frames (shown in gold).
4 EXPERIMENTS
In the following section, we describe and report on
experiments using POOF. Specifically, we first define
the specific models and datasets used and then per-
form multiple ablation experiments to understand set-
tings where POOF performs the best.
4.1 Setup
Throughout the experiments, we used the publicly-
available code for MSPN (Li et al., 2019) and RAFT
(Teed and Deng, 2020) as pose and optical flow es-
timation models respectively. We trained our pose
estimation model for 10 epochs with a learning rate
of 0.01 and a batch size of 32. For the optical flow
estimation model, we used the publicly-available pre-
trained weights from the Sintel dataset (Butler et al.,
2012).
4.2 Metrics
We also record the validation accuracy of the model
and refer to it as “Accuracy” in the experiment tables.
We define a keypoint to be accurate if the mean ab-
solute error (MAE) between the predicted keypoint
and the ground truth keypoint is less than a thresh-
old of 20 pixels. We chose a threshold of 20 through
visual inspection of different MAE distances on dif-
ferent examples. We also perform experiments on dif-
ferent threshold values in Section 4.7.
4.3 Datasets
We perform our experiments on an NHL video broad-
cast dataset. This dataset was selected because it
includes common real-world pose estimation chal-
lenges such as dataset-specific poses which are not
common in large datasets, joint occlusions caused by
hockey players skating in front of the camera, and
image blurriness caused by camera movement. Fur-
thermore, the visual appearance of an NHL game
is much different compared to the images in larger
benchmarks such as COCO (Lin et al., 2014), which
again, is the case for most real-world datasets.
Throughout the data, the hockey goalie has been
cropped out of the broadcast video and resized to
a 256 x 192 image. The ground truth training ex-
amples were manually selected to be sparse, non-
uniform, and contain a variety of poses across 6 dif-
ferent broadcast videos. The same approach was used
for the validation examples, but across 2 broadcast
videos (not included in the training set) and resulted
in 16 total labels. Throughout the experiments, we
used a radius of 10 (R=10) unless stated otherwise.
Figure 1 shows an example from the dataset as
well as the predicted pose from a model which has
been pretrained on the large pose estimation dataset,
COCO (Lin et al., 2014). We can see that the model
incorrectly classified the goalie’s pose. This is likely
because goalie images are visually different from ex-
icSPORTS 2021 - 9th International Conference on Sport Sciences Research and Technology Support
118
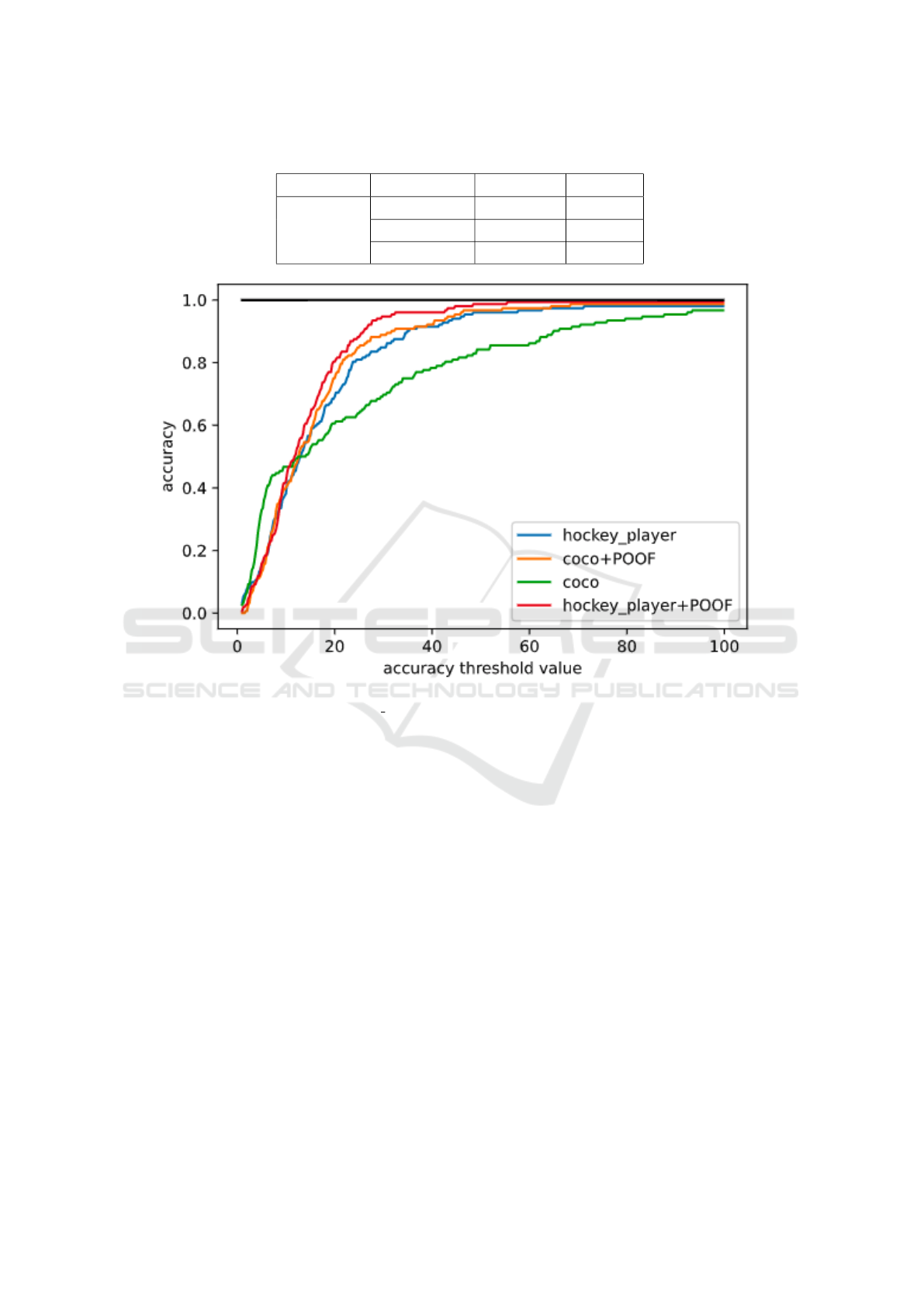
Table 1: Accuracy of different pose-estimation data for hockey goalie pose estimation.
Init Weights Training Data # Examples Accuracy
COCO
None 0 60.53
GT Labels 69 23.03
POOF 69 + 1314 75.66
Figure 3: Diagram with the accuracy on the y-axis and the accuracy threshold value on the x-axis. We compared results
using hockey player pretrained weights (hockey player), COCO pretrained weights (COCO) both with (+POOF) and without
POOF.
amples in the COCO dataset and the goalie is in a
dataset-specific pose (e.g, the hockey goalie is on his
knees).
4.4 POOF Ablation Study
Table 1 compares accuracies across different types
of training data using pretrained weights from the
COCO dataset. We compared three types of training
data: ‘None’ evaluates the pretrained model directly
on the dataset, ‘GT Labels’ finetunes the model on
the manually-annotated/ground-truth (GT) data, and
our proposed method ‘POOF’ trains the model on the
manually annotated data as well as the optical flow
propagated data.
In the second row of Table 1, we see that using
a small number of ground truth labels (69) leads to a
decrease in accuracy of -37% compared to using only
pretrained weights (from 60% to 23%). This shows
that using a small number of labels is worse than using
no labels.
We also see in the third row, using POOF, achieves
an increase of 15% accuracy (from 60% to 75%)
over using only pretrained weights while using the
same number of ground truth annotations as GT La-
bels. This shows that POOF can significantly improve
the performance compared to using only pretrained
weights with only a small number of annotations.
4.5 The Effects of Pretrained Weights
We also perform experiments to understand the effect
of using different pretrained weights. Table 2 shows
the results of using randomly initialized weights
(None), pretrained weights from the COCO dataset
(COCO), and pretrained weights from a very simi-
lar hockey player dataset which includes the hockey
players instead of the hockey goalies (Hockey Play-
ers).
We see in Table 2, from COCO pretrained
weights, POOF can significantly outperform the GT
Labels and pretrained weights. However, when using
POOF: Efficient Goalie Pose Annotation using Optical Flow
119

Table 2: Accuracy of different pose-estimation data for
hockey goalie pose estimation.
Init Weights Training Data Accuracy
None
None 0.00
GT Labels 0.06
POOF 38.82
COCO
None 60.53
GT Labels 23.03
POOF 75.66
Hockey Players
None 69.08
GT Labels 80.92
POOF 80.26
pretrained weights from the hockey player dataset, we
see POOF leads to about the same performance. From
these results, we hypothesize that when the domains
of the pretrained weights and the new dataset are simi-
lar, the performance improvement from POOF is min-
imal, however, POOF excels when the domains be-
tween the pretrained weights and the new dataset are
different. The minimal improvement finding agrees
with the results by (Neverova et al., 2019).
When not using pretrained weights (None), POOF
significantly outperforms training on ground truth la-
bels and increases the accuracy by 38% (from 0.06
to 38.82). This is very valuable in the case of anno-
tating new keypoints which are not included in large
benchmarks. Specifically, since keypoints that are
not included in the large pretraining benchmarks (e.g,
hockey stick keypoints, corner of goalie pads, etc.)
would not have any pretraining data, they would have
to use randomly initialized weights (None). Table 2
shows that POOF achieves a significant accuracy im-
provement for these new keypoints. This result was
not discovered in previous research.
4.6 Propagation Radius
Table 4 shows the accuracy achieved using different
values of R (which defines the number of neighbour-
ing frames). Note that the dataset used inverted key-
points to COCO (the left shoulder of COCO is the
right shoulder in this data, etc.) and so the accuracy
results are different from previous experiments.
Table 4 shows that the best accuracy is achieved
when R = 10 frames. We hypothesize that using R
= 5 resulted in lower performance due to having too
few labels. And we hypothesize that using a R = 20
results in too many incorrect annotations due to occlu-
sions (e.g, hockey players skating between the camera
and goalie), blurriness (e.g, from camera movement),
and small errors in close frames which result in larger
errors in frames further away.
We recommend, that in practice, R should be se-
lected based on the data. If occlusions and blurriness
are minimized throughout the dataset then keypoint
propagation should work better for a longer distance
and so a larger R value should be chosen. However,
if occlusions and blurriness occur often in the dataset,
then a lower R value should be chosen to reduce the
number of incorrect annotations.
4.7 Various Accuracy Thresholds
To further investigate the performance improvement
of POOF, we also investigated the results across dif-
ferent accuracy thresholds.
Figure 3 shows the accuracy (shown on the y-axis)
across different accuracy thresholds (shown on the x-
axis) which represents the maximum distance a key-
point can be from the ground truth and still be clas-
sified as correct. The black line is a straight line that
represents 100% accuracy. The steepness of the slope
is indicative of a better model.
We can see that the lines which use POOF (orange
and red) are much steeper than the lines which don’t
(green and blue). Specifically, if we look at the or-
ange vs green and red vs blue lines, we see that the
improvement using POOF is significant across many
accuracy thresholds. This further confirms POOF im-
proves model performance.
4.8 Change in Per-joint Accuracy
Lastly, to further understand where the performance
improvement is coming from, we investigated the ac-
curacy improvement of each joint when using POOF.
Table 3 shows the accuracy across all the joints.
The joint names are formatted to have the side of
the body, followed by an underscore, followed by the
body part (e.g, the left shoulder keypoint is formatted
as L shoulder). The second column shows the results
of the initial weights used (without any training) (e.g,
COCO) and the third column (e.g, +POOF) shows the
results after applying POOF. Also, the same format is
in the fourth and fifth columns which are used to com-
pare using pretrained weights from the hockey player
dataset without POOF (e.g, HockeyPlayer) and with
POOF (e.g, +POOF). We show the percentage im-
provement achieved when using POOF in brackets.
We see that POOF consistently improves the ac-
curacy of most joints by a significant amount (e.g,
+40% L wrist in the COCO row). However, POOF
also sometimes results in poorer accuracy (e.g, -9%
R ankle in the HockeyPlayer row). We hypothesize
this could be due to the model overfitting the noise
icSPORTS 2021 - 9th International Conference on Sport Sciences Research and Technology Support
120
Table 3: Accuracy on specific joints with (+POOF) and without POOF using different pretrained weights (e.g, COCO and
HockeyPlayer). Change in accuracy using POOF in brackets.
Joint COCO +POOF HockeyPlayer +POOF
L shoulder 86 93 (+7) 80 93 (+13)
R shoulder 100 100 (+0) 100 100 (+0)
L elbow 50 64 (+14) 71 78 (+7)
R elbow 80 80 (+0) 90 90 (+0)
L wrist 26 66 (+40) 40 53 (+13)
R wrist 58 50 (-8) 33 58 (+25)
L hip 58 83 (+25) 66 91 (+25)
R hip 81 72 (-9) 63 72 (+9)
L knee 57 85 (+27) 57 85 (+28)
R knee 33 50 (+17) 66 75 (+9)
L ankle 66 80 (+14) 80 86 (+6)
R ankle 41 75 (+34) 91 83 (-8)
Mean 61 74 (+13) 69 80 (+11)
Table 4: Accuracy using different radius sizes while propa-
gating the labels with POOF.
R # Examples Accuracy
5 255 51.64
10 420 61.50
20 670 35.21
in the propagated keypoints. In practice, this could
be solved by using an ensemble of models where for
each keypoint the best performing model is used to
predict it.
5 FUTURE RESEARCH
In this section, we describe some limitations of POOF
and potential future research directions.
One limitation of our research is that we only
tested POOF on a single hockey goalie dataset. It
would be interesting to experiment across a wider va-
riety of datasets and to assess consistency across other
datasets. Specifically, it would be interesting to see if
the results held across different sports such as soccer
or basketball where the person’s motion and the video
characteristics are very different compared to hockey.
Another avenue for future research is to further in-
vestigate the effect of using different R values. In our
research, we only investigated three potential values,
but it would be interesting to test more values to fur-
ther understand their relationship to performance. As
well, ideally, we would want to reduce the importance
of selecting the correct hyperparameter so one could
investigate how to select R quantitatively rather than
qualitatively.
One of the main limitations with POOF is that the
optical flow estimation is unable to account for key-
points that start as visible and later become occluded
by either another object occluding the keypoints or
through the person rotating in a way that occludes
the keypoint. Furthermore, POOF is also unable to
account for keypoints that were labelled as occluded
but become visible later in the video. Different solu-
tions could be experimented with to solve this prob-
lem which could allow us to label longer sequences.
This would further increase the number of annotations
while also reducing the amount of noise in the prop-
agated annotations. This would be likely to lead to
further improvement in model performance. One po-
tential solution could be to incorporate visual infor-
mation in the keypoint propagation stage similar to
(Charles et al., 2016).
6 CONCLUSION
In this paper, we introduced POOF, a data-efficient
pose annotation method that utilizes optical flow to
propagate ground truth annotations to neighbouring
frames. POOF improves on the previous work of
pose estimation solutions by removing data annota-
tion constraints such as requiring a ground truth key-
point every n-frames and shows it performs best when
transferring models between different domains (in Ta-
POOF: Efficient Goalie Pose Annotation using Optical Flow
121

ble 2). Using a hockey goalie dataset, we show that
POOF can improve performance with a very small
amount of labels. We also show POOF can achieve
significantly improved results over using pretrained
weights across various accuracy thresholds. Further-
more, we showed this performance improvement is
achieved across most individual joints and also sug-
gested multiple directions for future research. Over-
all, this research should significantly reduce the time
required for annotating pose data across different do-
mains without compromising model accuracy and al-
low pose estimation to be more easily applied to a
wide variety of domains.
ACKNOWLEDGEMENTS
This research is supported in part by grants from MI-
TACs and Stathletes, Inc.
REFERENCES
Bertasius, G., Feichtenhofer, C., Tran, D., Shi, J., and Tor-
resani, L. (2019). Learning temporal pose estimation
from sparsely-labeled videos. arXiv, (NeurIPS):1–12.
Butler, D. J., Wulff, J., Stanley, G. B., and Black, M. J.
(2012). A naturalistic open source movie for optical
flow evaluation. In European Conference on Com-
puter Vision, pages 611–625. Springer.
Charles, J., Pfister, T., Magee, D., Hogg, D., and Zisserman,
A. (2016). Personalizing human video pose estima-
tion. In Proceedings of the IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 3063–
3072.
Doersch, C. and Zisserman, A. (2019). Sim2real transfer
learning for 3d human pose estimation: motion to the
rescue. arXiv preprint arXiv:1907.02499.
Hinterstoisser, S., Pauly, O., Heibel, H., Marek, M., and
Bokeloh, M. (2019). An annotation saved is an anno-
tation earned: Using fully synthetic training for object
instance detection. arXiv preprint arXiv:1902.09967.
Li, W., Wang, Z., Yin, B., Peng, Q., Du, Y., Xiao, T., Yu,
G., Lu, H., Wei, Y., and Sun, J. (2019). Rethinking
on multi-stage networks for human pose estimation.
arXiv preprint arXiv:1901.00148.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Euro-
pean Conference on Computer Vision, pages 740–755.
Springer.
Neverova, N., Thewlis, J., Guler, R. A., Kokkinos, I., and
Vedaldi, A. (2019). Slim densepose: Thrifty learning
from sparse annotations and motion cues. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition, pages 10915–10923.
Newell, A., Yang, K., and Deng, J. (2016). Stacked hour-
glass networks for human pose estimation. In Euro-
pean Conference on Computer Vision, pages 483–499.
Springer.
Pfister, T., Charles, J., and Zisserman, A. (2015). Flow-
ing convnets for human pose estimation in videos. In
Proceedings of the IEEE international Conference on
Computer Vision, pages 1913–1921.
Romero, J., Loper, M., and Black, M. J. (2015). Flow-
cap: 2d human pose from optical flow. In German
Conference on Pattern Recognition, pages 412–423.
Springer.
Teed, Z. and Deng, J. (2020). Raft: Recurrent all-pairs field
transforms for optical flow. In European Conference
on Computer Vision, pages 402–419. Springer.
Zhang, D., Guo, G., Huang, D., and Han, J. (2018). Pose-
flow: A deep motion representation for understand-
ing human behaviors in videos. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 6762–6770.
icSPORTS 2021 - 9th International Conference on Sport Sciences Research and Technology Support
122
