
Accurate 6D Object Pose Estimation and Refinement in Cluttered Scenes
Yixiang Jin
a
, John Anthony Rossiter
b
and Sandor M. Veres
c
Department of Automatic Control Systems and Engineering, University of Sheffield, U.K.
Keywords:
6D Pose Estimation, 3D Robotic Vision, 3D Object Detection.
Abstract:
Estimating the 6D pose of objects is an essential part of a robot’s ability to perceive their environment. This
paper proposes a method for detecting a known object and estimating its 6D pose from a single RGB im-
age. Unlike most of the state-of-the-art methods that deploy PnP algorithms for estimating 6D pose, the
method here can output the 6D pose in one step. In order to obtain estimation accuracy that is comparable to
RGB-D based methods, an efficient refinement algorithm, called contour alignment (CA), is presented; this
can increase the predicted 6D pose accuracy significantly. We evaluate the new method in two widely used
benchmarks, LINEMOD for single object pose estimation and Occlusion-LINEMOD for multiple objects
pose estimation. The experiments show that the proposed method surpasses other state-of-the-art prediction
approaches.
1 INTRODUCTION
Accurate 6D pose estimation of objects is impor-
tant in many real-world applications of computer vi-
sion, including augmented reality, robot manipula-
tion and advanced autopilot operations on aerial and
ground vehicles. Currently the majority of accurate
6D pose estimation methods rely on RGB-D informa-
tion (Brachmann et al., 2014; Brachmann et al., 2016;
Michel et al., 2017; Xiang et al., 2017; Wang et al.,
2019). However, the depth sensor exposes several
practical limitations such as high power consumption,
limited working range, and sensitivity to the environ-
mental effects. Such impediments mean that accurate
6D detection is not normally deployed on monocular
cameras and mobile devices. The goal of this paper is
to present a precise 6D detection method that works
from a single RGB image and relies on the use of deep
neural networks.
Traditionally, the 6D pose estimation issue is ad-
dressed by pairing feature points between 2D images
and to obtain the corresponding 3D object models
(Lowe, 2004) from the resulting cloud point. How-
ever, such approaches have failed to address texture-
less targets. By contrast, the template-matching
method (Hinterstoisser et al., 2011; Hinterstoisser
et al., 2012) is more robust than feature-matching,
a
https://orcid.org/0000-0001-6286-278X
b
https://orcid.org/0000-0002-1336-0633
c
https://orcid.org/0000-0003-0325-0710
but it leads to low pose detection accuracy in environ-
ments full of occluded objects. Although dense fea-
ture learning approaches (Kendall and Cipolla, 2017;
Krull et al., 2017) present good performance in oc-
clusions, they fail to resolve the case of symmetric
objects.
The emergence of deep learning techniques, es-
pecially CNN-based category detectors, have shown
excellent outcomes for object detection (Krull et al.,
2017; Ren et al., 2015) and object segmentation(He
et al., 2017). Recently, there is an increasing number
of works (Kehl et al., 2017; Tekin et al., 2018; Hu
et al., 2019; Hodan et al., 2020), which employ deep
learning for 6D pose estimation. Most of these ap-
proaches follow a similar paradigm: first they use a
neural network to detect the eight 3D bounding box
vertices associated with the target objects, then they
perform an Perspective-n-Point (PnP) (Lepetit et al.,
2009) algorithm calculating the orientation and trans-
lation. However, this paradigm suffers from a severe
shortcoming in terms of low detection accuracy. The
reason is that the key points are often not on the sur-
face of the object, so there is some inaccuracy in the
detection. As the PnP algorithm continues to accu-
mulate these errors, an Iterative Closest Point (ICP)
processing is executed in several steps to refine the
pose.
The goal of this paper is to resolve the above lim-
itations by training a deep neural network that can ac-
curately predict 6D pose from an RGB image in a sin-
Jin, Y., Rossiter, J. and Veres, S.
Accurate 6D Object Pose Estimation and Refinement in Cluttered Scenes.
DOI: 10.5220/0010654500003061
In Proceedings of the 2nd International Conference on Robotics, Computer Vision and Intelligent Systems (ROBOVIS 2021), pages 31-39
ISBN: 978-989-758-537-1
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
31

gle step. Compared with previous works, our method
can estimate the object pose directly without a PnP
iterative process. In addition, we design a contour
alignment (CA) refinement algorithm to replace the
ICP processing that requires depth information. Due
to the use of CA, our system only needs RGB infor-
mation to run.
In this paper, we propose a two-stage convolution
neural network inspired by Mask RCNN (He et al.,
2017). This network takes a single RGB image as
an input and can output the object class, 2D bound-
ing box, the object mask and object rotation simulta-
neously. Following these, the lateral position of the
object is calculated by a reverse projection algorithm.
In order to obtain estimation accuracy comparable to
RGB-D, we propose an efficient algorithm to align the
object 2D projection and the object mask contour.
We evaluate our approach on the LINEMOD
dataset(Hinterstoisser et al., 2012) (a single object
6D pose estimation dataset) and on the Occluded-
LINEMOD dataset (Brachmann et al., 2014) (a mul-
tiple objects dataset). Additionally, we compare our
result with some recent work. Furthermore, to com-
pletely evaluate our algorithm, we perform some tests
on objects in the real world.
In summary, the main contributions of this paper
are:
• We propose a novel 6D pose estimation method
which can detect objects, segment instances and
predict 6D pose simultaneously without any PnP
process.
• We introduce Contour-Alignment, an efficient al-
gorithm for pose refinement in an RGB image.
This paper consists of five sections. After describ-
ing the related prior work, the paper introduces the
new methodology. This is then followed by presenta-
tion of a range of experiments and finally conclusions
are drawn.
2 RELATED WORK
In this section, we review published 6D pose esti-
mation methods, ranging from traditional feature and
template matching approaches to state-of-art CNN-
based methods.
Early object 6D pose estimation approaches
mainly used feature matching (Lowe, 2004) and tem-
plate matching (Hinterstoisser et al., 2011; Hinter-
stoisser et al., 2012). These works were primarily ap-
plicable to objects with rich texture However, many
objects are texture free in the real world and industry.
Consequently, these traditional approaches often fail
in severely occluded and cluttered environments.
In recent years, there are an increasing number of
6D pose estimation works which involve the use of
CNNs. CNN-based approaches can be classified in
terms of input data into RGB based methods (Kehl
et al., 2017; Tekin et al., 2018; Hu et al., 2019;
Rad and Lepetit, 2017) and RGB-D based methods
(Michel et al., 2017; Xiang et al., 2017; Wang et al.,
2019). As for the RGB-D inputs, a common strat-
egy is to establish correspondences between 3D scene
points and 3D model points (Park et al., 2019), and
then estimate the 6D pose of the object by solving
a least-squares problem. Some authors (Brachmann
et al., 2014) proposed a system to predict dense object
coordinates that can compute object pose from dense
correspondences, while others (Wang et al., 2019)
embed and fused RGB pixel and point clouds at a per-
pixel level as training data.
Methods for the RGB image pose detection can
be divided into two groups. Methods in the first
group detect 3D bounding box vertices for objects
and then compute 6D pose by solving the PnP prob-
lem (Kehl et al., 2017; Tekin et al., 2018; Hu et al.,
2020). This is currently the most popular compu-
tational paradigm. The second type of RGB-based
pose estimation treats 6D pose estimation as a re-
gression issue (Do et al., 2018). However, the per-
formance of these approaches is not comparable to
RGB-D based works owing to the lack of an effec-
tive pose refinement procedure using RGB images
only. Additionally, to make estimation more precise,
some researchers focus on refinement methods for
pose correction after the initial calculation. For ex-
ample, Deep-IM (Li et al., 2018) proposes an iterative
matching network and Fabian et al. (Manhardt et al.,
2018) introduce ”visual loss” to improve the initial
pose.
In this paper we propose an end-to-end network,
which can not only detect and segment but also esti-
mate the 6D pose from an RGB image. We also in-
troduce a novel refinement technique, called contour-
alignment, which is applied as post-processing in the
presented RBG based 6D pose estimation method.
3 METHODOLOGY
In this section we will introduce our novel 6D pose es-
timation algorithm and refinement approach. We first
describe our network architecture, then we present
our method to estimate object pose. After that, we
detail our CA refinement algorithm before finally in-
troducing the set up for training and inference.
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
32
3.1 Network Architecture
We propose an architecture inspired by Mask-RCNN
and goes beyond Mask-RCNN in capability. Our
network contains two stages: i) it starts with the
ResNet101 (He et al., 2016) backbone that extracts
features over the entire image and then ii) the Re-
gion of Interest (ROI) is extracted by a Region Pro-
posal Network (RPN) that feeds its results to the head
branches. In our system we have five parallel head
branches as follows:
1. class regression branch
2. box regression branch
3. segmentation head branch
4. orientation head branch
5. corner head branch
The combined network with the Mask-RCNN can
achieve classification, segmentation, and estimation
of 6D pose of object instances simultaneously.
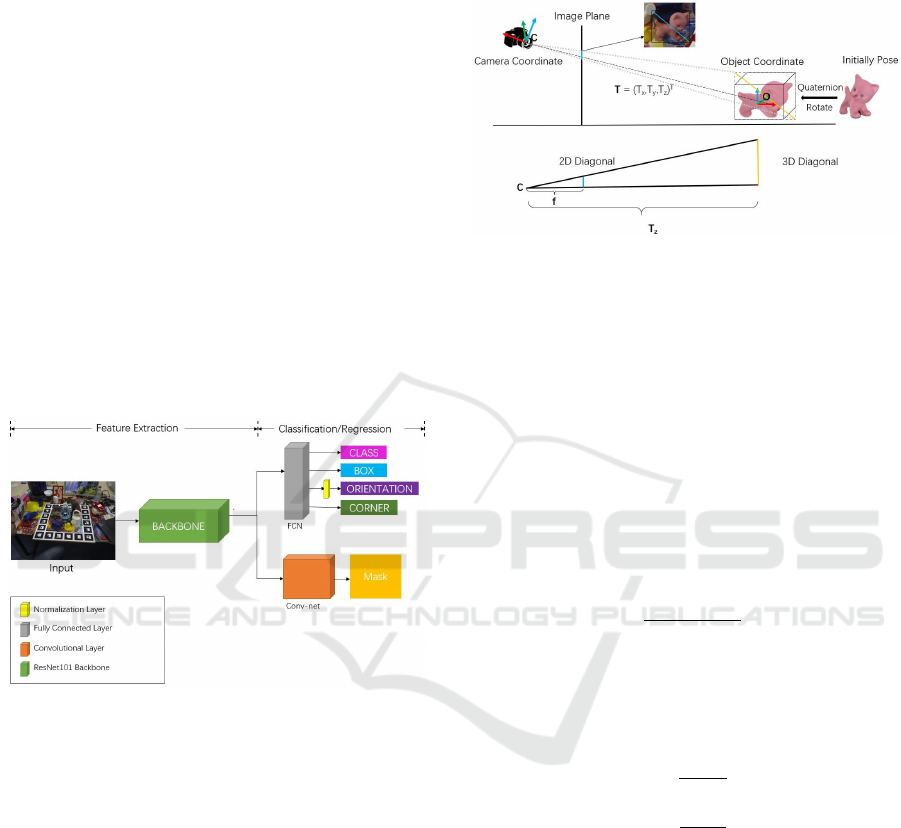
Figure 1: The neural network architecture. The shape of
fully connected layers are two 4096 × 1 × 1 layer and the
size of convolutional layer is 7 ×7 × 512.
Our architecture in Fig.1, uses quaternions to rep-
resent rotation, so there is a normalization layer in
front of a rotation layer. We also use the fully-
convolutional layer to predict a pixel-wise instance
segmentation by up-sampling the feature map to 28 ×
28.
3.2 Pose Estimation
The object pose usually includes a rotation matrix and
a translation vector. The rotation matrix is estimated
using quaternion regression from the neural network.
As for the translation vector, instead of predicting it
from neural networks directly, we have designed a
fast and simple algorithm to calculate it. The reason
why we deprecate regression of translation is that the
neural network can’t handle camera intrinsic matrix
changes. It is impossible to train a network for each
type of camera. So our network predicts object rota-
tion and translations separately.
Figure 2: Illustrating the relationship between the object
coordinate system and the camera coordinate system. The
3D translation is calculated by a projection principle.
As shown in Fig.2, the translation vector T =
[T
x
, T
y
, T
z
] defines the coordinates of the object center
in the camera coordinate system and the cat model is
under the current orientation. The crucial step to esti-
mate the 3D translation is calculating T
z
. The camera
projection is a 3D-to-2D perspective projection and
we utilize the reverse projection principle to recover
the depth T
z
. As illustrated in Fig.2, a 2D diagonal
(the blue line obtained from neural network) and a 3D
diagonal (the yellow line calculated from 3D model)
can be used to derive the T
z
:
T
z
=
3Ddiagonal
2Ddiagonal
∗ f (1)
where f denote the focal lengths of the camera. We
assume that the focal lengths in horizontal f
x
and ver-
tical f
y
directions are equivalent. The same procedure
can be easily adapted to obtain T
x
and T
y
:
T
x
T
y
=
u − c
x
f
x
∗ T
z
v − c
y
f
y
∗ T
z
(2)
where [u, v] is the object center, which predicts from
the neural network. [c
x
, c
y
] expresses the principal
point, which would be theoretically in the centre of
the image.
3.3 Pose Refinement
Though the estimated object poses are already pre-
cise, they can still be improved by a further refine-
ment. For the RBG-D data, the detection usually fol-
lows by ICP processing. In this paper, we propose
an edge-based refinement algorithm by aligning the
object instance contours and 2D projection contours.
Accurate 6D Object Pose Estimation and Refinement in Cluttered Scenes
33

We call it a contours alignment (CA) algorithm. This
method can be adapted to any CNN-based 6D pose
estimation framework to improve accuracy.
Algorithm 1: Position Refinement.
Input: Initialise object pose P
0
; Object mask M
0
pre-
dicted by neural network; 3D-2D projection func-
tion f ; Object model;
Output: Refine object pose P
n
1: Calculate contour C
0
for object mask M
0
.
2: Set C
0
as reference points.
3: Compute 2D projection pro j with current pose
P
0
, pro j = f (P
0
)
4: Extract contour C
1
from pro j.
5: Apply a closest point pairs algorithm between C
0
and C
1
to obtain C
3
.
6: Compute residual error: d f = C
3
−C
1
.
7: Calculate Jacobian matrix J of f , so d f = Jdx.
8: Solve dx using pseudo inverse dx = (J
T
J)
−1
J
T
dy,
and update pose P
0
.
9: Repeat steps 3-8 until reach threshold; return P
0
.
In Algorithm 1, we extract contours by using
the ”find contours” function from the skimage mod-
ule(Van der Walt et al., 2014), that is an image pro-
cessing module in python. The ”find contours” func-
tion uses the “matching squares” and linearly inter-
polated approach to obtaining the iso-valued contours
of the input 2D array for a specific value. The closest
points pairing process employs a kd-tree search from
the ”sklearn.neighbors” module (Pedregosa et al.,
2011). The closest point pairs guarantee that two con-
tour arrays have the same shape so that we can per-
form arrays subtraction.
In order to achieve an appropriate balance be-
tween accuracy and efficiency, we only optimize the
translation because the error in translation is more
dominant than rotation. the Jacobian matrix J is:
J = [
∂ f
∂T
x
,
∂ f
∂T
y
,
∂ f
∂T
y
] (3)
we approximate the derivatives to obtain:
J ≈
f (T + [ε, 0, 0]) − f (T )
ε
f (T + [0, ε, 0]) − f (T )
ε
f (T + [0, 0, ε]) − f (T )
ε
T
(4)
where T denotes the translation vector and ε is a tiny
number. In this paper we choose ε = 0.0000001 to
guarantee the size of projection points is constant.
Therefore, in Algorithm 1, the two contour arrays C
1
and C
3
can subtract.
(a) 2D Projection contour
without refinement.
(b) 2D Projection contour af-
ter refinement.
(c) Translation error under
different iteration times.
(d) Pixel error under different
iteration times.
Figure 3: Improvement of our refinement algorithm for 6D
pose estimation. In (a) and (b), green lines show the ground
truth contour, yellow lines present the predicted mask con-
tour and red lines indicate 2D projection using the current
pose.
In Fig. 3 one can observe that the projection con-
tour extracted by refinement of pose (red line) coin-
cides with the ground truth contour (green line). This
shows that our algorithm can improve pose accuracy
significantly. Furthermore, we can see that in the first
refinement iteration, both the translation and pixel er-
rors are reduced by nearly 60%, and that this tends to
converge after the second refinement iteration. There-
fore, our algorithm can refine object pose quickly and
effectively.
3.4 Training and Inference
We have implemented our system in Python3 using
the TensorFlow library(Abadi et al., 2016). The input
to the neural network was an RGB image with size
640 × 480. Our training data consisted of three parts:
i) first is the RGB image; ii) second is a binary mask
image and iii) the third part is a label. Unlike other
approaches using eight corner annotations or 6D pose
annotations, we adopt a new annotation method based
on a quaternion and two corner points as shown in
the Fig.4, because such an annotation can fit our pose
estimation algorithm better.
In training, we define a multi-task loss to jointly
train the classification, bounding box regression, in-
stance segmentation, quaternion regression and cor-
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
34

Figure 4: Comparing with different annotation method.
ner point regression. Formally, the total loss function
is defined as follows:
L = α
1
L
cls
+ α
2
L
box
+ α
3
L
mask
+ α
4
L
quat
+ α
5
L
cor
(5)
where α
1
, α
2
, α
3
, α
4
, α
5
are loss weights, which in-
dicate the importance of each loss component. In our
experiments, we set α
1
= α
2
= α
5
= 1, α
3
= 10 and
α
4
= 2. L
cls
is softmax loss, L
box
and L
cor
are smooth
L1 loss, L
mask
is binary cross-entropy loss, and L
quat
is a derivation of L2 Loss, defined as follows:
L
quat
=
n
∑
i=1
(βr
i
− β¯r)
2
n
(6)
where r
i
denotes the predicted quaternion and ¯r is the
ground true quaternion. The four parameters of the
quaternion are all between 0 and 1, so we apply a
magnification factor β (β = 10 in our experiments).
We train our network on a Tesla V100 GPU for 90
epochs. The first 20 epochs train network heads with
a 0.002 learning rate. Then, using the same learning
rate, we fine tune the layers from ResNet stage 4 in
the next 10 epochs. After that, we train all layers for
30 epochs. In the following 10 epochs, the learning
rate is decreased by 10 until we train all the layers.
Lastly, we change the learning rate to 0.00002 to fine
tune all the layers in the final 10 epochs.
At the inference phase, we select object instances
which have their detection scores higher than 0.9. Our
pose estimation algorithm and refinement method are
then applied to the detected objects to obtain accurate
6D pose matrices.
4 EXPERIMENTS
We conduct our experiments on two standard data sets
including a single object pose data set LINEMOD,
and a multiple objects pose data set Occlusion-
LINEMOD to evaluate our method for 6D pose es-
timation. We compare our work against some widely
used state-of-the-art 6D pose estimation approaches.
We also prove that our method can apply to real-world
custom objects.
4.1 Evaluation Metrics
Our work has been evaluated under the average dis-
tance (ADD) metric (Hinterstoisser et al., 2012). The
average distance calculates the mean of pairwise dis-
tances between 2D projections of the 3D models, cal-
culated utilizing the estimated pose and ground truth
pose:
ADD =
1
m
∑
x∈M
min
M
k(R
R
Rx
x
x + T
T
T ) − (
¯
R
R
Rx
x
x +
¯
T
T
T )k (7)
where R
R
R, T
T
T ,
¯
R
R
R, and
¯
T
T
T are ground true rotation,
ground true translation, estimated rotation and esti-
mated translation, respectively. M denotes the vertex
set of the 3D model, and m means the number of 3D
points. evaluation is based on the widely used metric
ADD-0.1d and REP-5px, where the estimated pose
is considered to be correct if the average distance is
below 10% of the object’s diameter or smaller than a
5 pixels threshold.
4.2 Single Object Pose Estimation
We first test our method on the LINEMOD data set,
which contains 15 objects with poor texture in a clut-
tered environment. In common with other papers in
the literature, we evaluate methods on 13 of these ob-
jects. We adopt similar settings with (Tekin et al.,
2018) to randomly select 30% of the images as train-
ing data and the rest of images as test data. Only RGB
images are however used in the training and testing
phase.
Table 1: Comparison of our method with state-of-the-art
work on LINEMOD data set in terms of ADD-0.1 met-
ric. We present percentages of correctly estimated pose and
highlight the best result among those by bold numbers.
Object
Method
Zhao Yolo-6D SSD-6D Our
Ape 35.1 21.62 0 42.29
Benchvise 23.9 81.8 0.18 77.64
Cam 33.2 36.57 0.41 66.78
Can 21.0 68.80 1.35 74.09
Cat 30.6 41.82 0.51 57.89
Driller 28.6 63.51 2.58 70.45
Duck 27.9 27.23 0 37.81
Eggbox 38.9 69.58 8.9 64.5
Glue 31.2 80.02 0 44.51
Holepuncher 13.4 42.63 0.30 62.40
Iron 37.8 74.97 8.86 78.01
Lamp 34.5 71.11 8.20 84.5
Phone 19.9 47.74 0.18 65.27
Average 28.9 55.95 2.42 63.59
We compare our method with the state-of-the-art
approaches Yolo-6D(Tekin et al., 2018), Zhan(Zhao
et al., 2020) and SSD-6D (Kehl et al., 2017), which
Accurate 6D Object Pose Estimation and Refinement in Cluttered Scenes
35
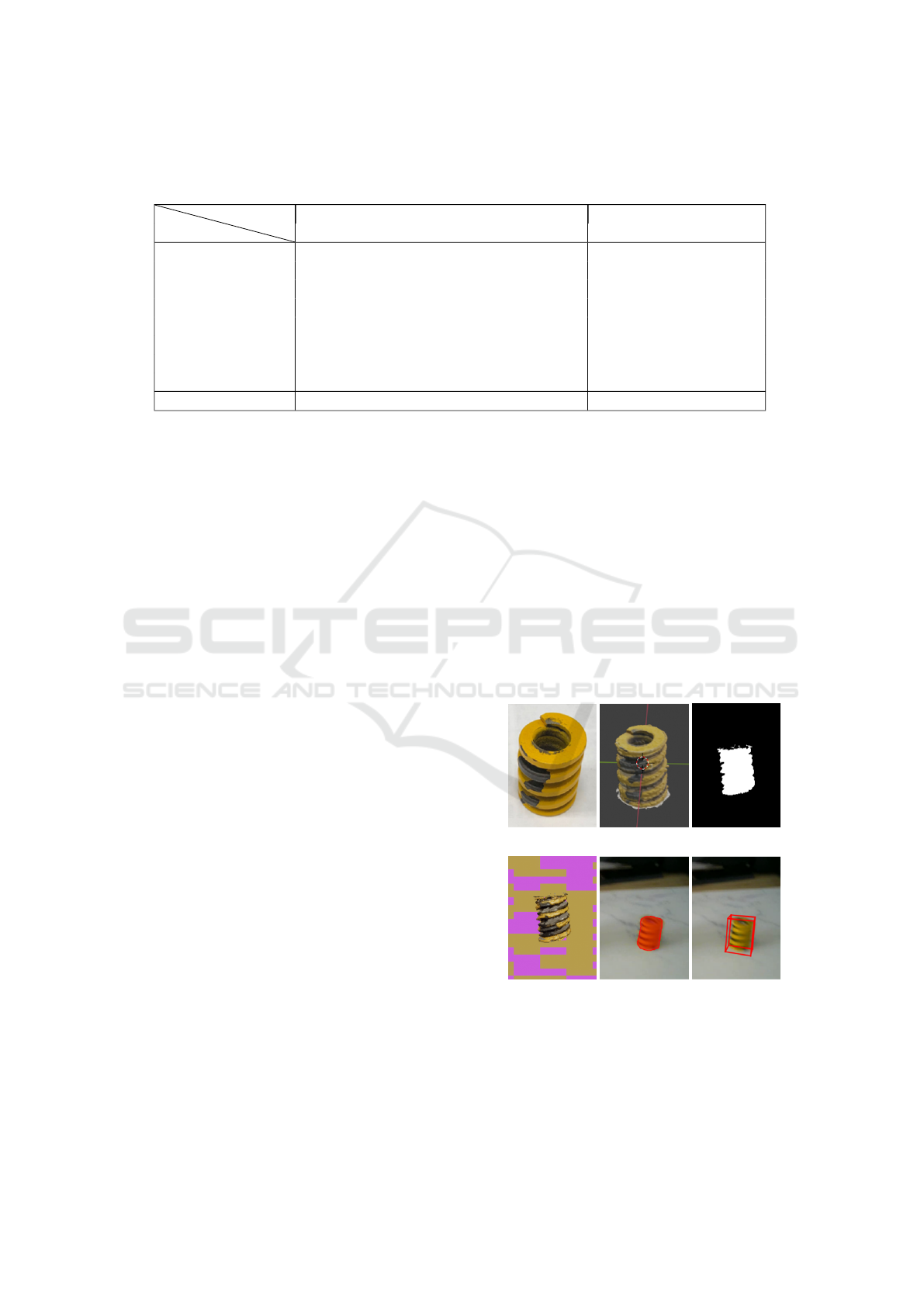
Table 2: Comparison of our method with state-of-the-art work on Occluded LINEMOD dataset in terms of ADD-0.1 metric
and REP-5px metric. We present percentages of correctly estimated pose and highlight the best result among those by bold
numbers.’-’ denote the results not in the original paper.
Object
Method ADD-0.1 REP-5px
PoseCNN Heatmaps Seg-drive Our iPose Yolo-6D Our
Ape 9.6 16.5 12.1 18.87 24.2 7.0 54.69
Can 45.2 42.5 39.9 50.52 30.2 11.2 44.82
Cat 0.9 2.8 8.2 15.38 12.3 3.6 53.73
Driller 41.4 47.1 45.2 34.0 - 1.4 17.49
Duck 19.6 11.0 17.2 27.00 12.1 5.1 51.91
Eggbox 22.0 24.7 22 20.62 - - 41.37
Glue 38.5 39.5 38.5 26.43 25.9 6.5 43.72
Holepuncher 22.1 21.9 36.0 32.0 20.6 8.3 31.78
Average 24.9 25.8 27.0 28.1 20.8 6.2 42.43
run under a similar setting. In TABLE 1, the com-
peting methods are presented results. On average, our
method outperforms all the considered competitors by
a margin of at least 7% or more. We also find that
our algorithm is more effective for small-size objects.
For example, with the camera model whose diameter
is 17.24 cm, the estimated pose accuracy increases by
nearly 30%. Even when compared with some RBG-D
based methods such as SSD-6D, for which the aver-
age accuracy reaches 76.3%, our method is still com-
petitive. A possible reason that our method gives a
less accurate results than Yolo-6D for glue is related
to the shape of glue. The side of glue object is so
narrow that hard to extra accurate side counter.
4.3 Multiple Object Instance Pose
Estimation
The Occlusion-LINEMOD is a multi-objective esti-
mation benchmark which contains 8 objects and 1214
images. As its name shows, a few objects in the im-
ages are heavily occluded, which makes estimation
extremely difficult.
To create training data, we follow the same data
selection setting as in the previous evaluation. Due to
that every image contains several instances, we mod-
ify our training strategy: the training epoch increases
from 90 to 160. The first 20 epochs train network
heads with 0.004 learning rate. Then, using the same
learning rate, we fine tune layers from ResNet stage
4 and up during the next 10 epochs. After that, we
train all layers for 70 epochs. This initial learning
rate value can make training convergence quickly. In
the next 20 epochs, the learning rate is decreased by
10 in all layers. Finally, learning rate is set to 0.00004
in order to fine tune all layers in the final 20 epochs.
Through twice learning rate tuning, we can obtain a
minimize loss. This setting achieves excellent perfor-
mance in our experiments. In addition, the segmen-
tation loss weight α
3
changes to 40 in order to over-
come excessive occlusion in the image.
As can be seen from the TABLE 2, our work
outperforms other methods, such as PoseCNN(Xiang
et al., 2017), Heatmaps(Oberweger et al., 2018), Seg-
drive(Hu et al., 2019), iPose(Jafari et al., 2018), Yolo-
6D(Tekin et al., 2018), in both ADD-0.1d metric and
REP-5px metric. In Fig.7, we can notice that the esti-
mated pose is still accurate with partial occlusion. But
if the visibility of the object is too low, the estimation
will fail.
4.4 Application to Real-world Object
(a) (b) (c)
(d) (e) (f)
Figure 5: The application in real world object: (a) Real ob-
ject. (b) Object model. (c) Synthesis mask. (d) Synthesis
RGB image. (e) Detected mask. (f) Estimated pose.
The object models in the standard data set are precise,
and the annotations are accurate. However, in the real
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
36
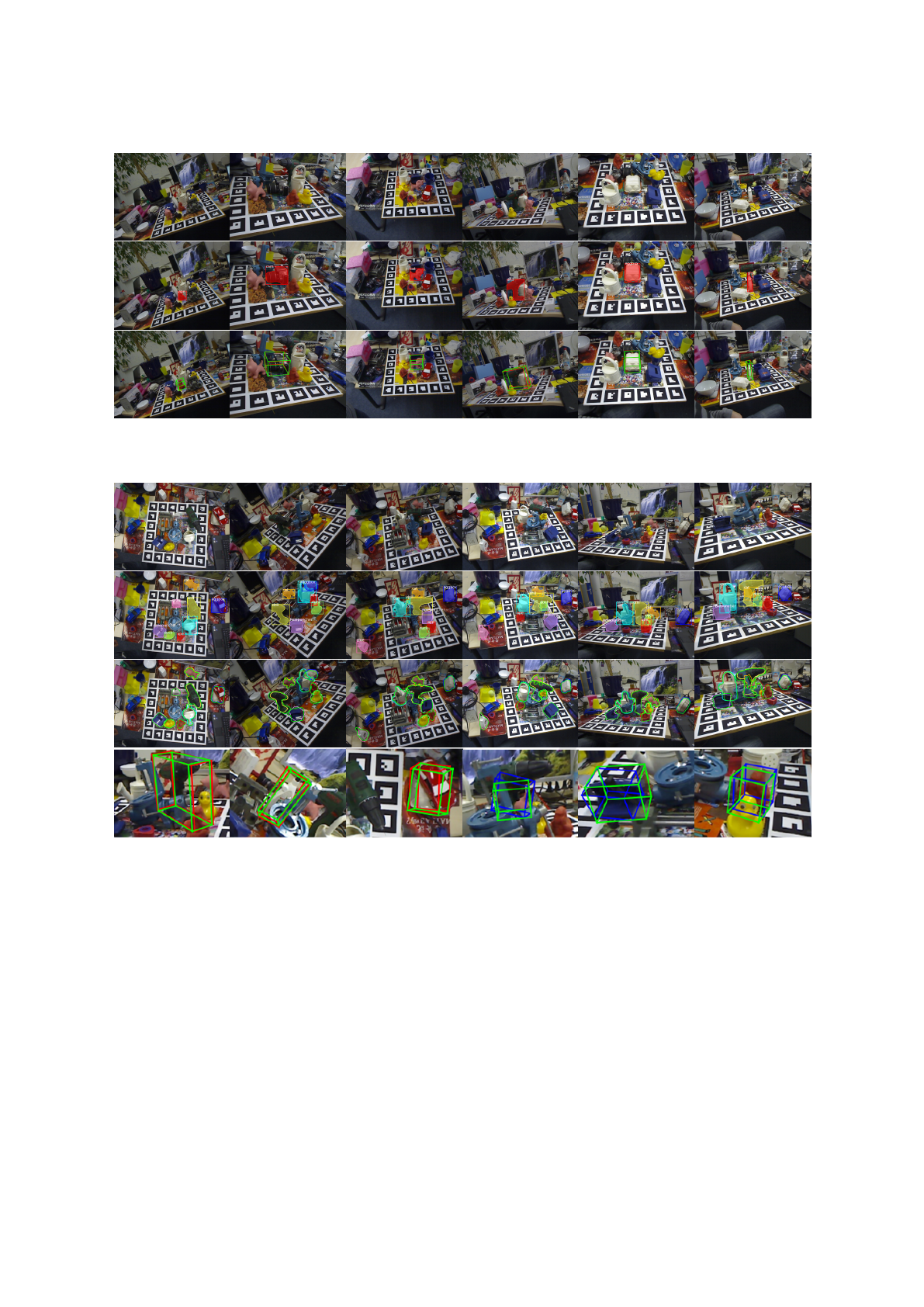
Figure 6: Qualitative results on LINEMOD. First row : the original images. Second row: the predicted object class, 2D
bounding box and segmentation. Third row: 6D pose represented by 3D bounding boxes which green is the ground truth and
the red is estimated.
Figure 7: Qualitative results on Occluded LINEMOD. First row : the original images. Second row: the predicted object
class, 2D bounding box and instance segmentation(different color means different class). Third row: 6D pose represented by
2D projection contour which green is the ground truth and the other color is estimated. Forth row: Area screenshot, the first
three columns is success cases and the last three columns is fail cases.
world, it is hard to obtain a perfect object model and
annotate poses on authentic images. We consider syn-
thetic images to train so that this method can apply
our method on a broader range of objects.
In our experiment, the object model shown in the
Fig.5(b) is obtained by structure from motion (SFM)
(Wu et al., 2011) method, which can reconstruct an
object model using the object images capturied from
different angles. Then, utilising the NVIDIA Deep
learning Dataset Synthesizer (NDDS) tool (To et al.,
2018) generates synthetic training data. Finally, we
feed the training data into the neural network. In this
way, the pipeline of 6D object pose estimation can be
more generic.
5 CONCLUSIONS
We have introduced a new method to detect an ob-
ject class, segment instance and estimate object 6D
pose simultaneously from a single RGB image. Our
method can predict object orientation and calculate
Accurate 6D Object Pose Estimation and Refinement in Cluttered Scenes
37

translation without a PnP process. What’s more, we
propose a novel pose refinement algorithm Contour-
Align by aligning the mask contour and the 2D pro-
jection contour for the single RGB image. This refine-
ment technique can be applied to most of the post-
processing of RBG based 6D estimation. Further-
more, the evaluation shows our work surpasses cur-
rent state-of-the-art methods. Therefore, our work is
encouraging because it indicates that it is feasible to
accurately predict the 6D pose object pose in a clut-
tered environment using RGB data only. An interest-
ing future work is to improve the estimation accuracy
when the CAD model is unavailable.
ACKNOWLEDGEMENTS
This work was supported by EPSRC Grant
No.EP/R026084/1, Robotics and Artificial Intel-
ligence for Nuclear (RAIN), UK.
REFERENCES
Abadi, M., Barham, P., Chen, J., Chen, Z., Davis, A.,
Dean, J., Devin, M., Ghemawat, S., Irving, G., Isard,
M., et al. (2016). Tensorflow: A system for large-
scale machine learning. In 12th {USENIX} sympo-
sium on operating systems design and implementation
({OSDI} 16), pages 265–283.
Brachmann, E., Krull, A., Michel, F., Gumhold, S., Shot-
ton, J., and Rother, C. (2014). Learning 6d object
pose estimation using 3d object coordinates. In Euro-
pean conference on computer vision, pages 536–551.
Springer.
Brachmann, E., Michel, F., Krull, A., Ying Yang, M.,
Gumhold, S., et al. (2016). Uncertainty-driven 6d
pose estimation of objects and scenes from a single
rgb image. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 3364–
3372.
Do, T.-T., Cai, M., Pham, T., and Reid, I. (2018). Deep-
6dpose: Recovering 6d object pose from a single rgb
image. arXiv preprint arXiv:1802.10367.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE international
conference on computer vision, pages 2961–2969.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Hinterstoisser, S., Cagniart, C., Ilic, S., Sturm, P., Navab,
N., Fua, P., and Lepetit, V. (2011). Gradient response
maps for real-time detection of textureless objects.
IEEE transactions on pattern analysis and machine
intelligence, 34(5):876–888.
Hinterstoisser, S., Lepetit, V., Ilic, S., Holzer, S., Bradski,
G., Konolige, K., and Navab, N. (2012). Model based
training, detection and pose estimation of texture-less
3d objects in heavily cluttered scenes. In Asian con-
ference on computer vision, pages 548–562. Springer.
Hodan, T., Barath, D., and Matas, J. (2020). Epos: estimat-
ing 6d pose of objects with symmetries. In Proceed-
ings of the IEEE/CVF conference on computer vision
and pattern recognition, pages 11703–11712.
Hu, Y., Fua, P., Wang, W., and Salzmann, M. (2020).
Single-stage 6d object pose estimation. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition, pages 2930–2939.
Hu, Y., Hugonot, J., Fua, P., and Salzmann, M. (2019).
Segmentation-driven 6d object pose estimation. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 3385–3394.
Jafari, O. H., Mustikovela, S. K., Pertsch, K., Brachmann,
E., and Rother, C. (2018). ipose: instance-aware
6d pose estimation of partly occluded objects. In
Asian Conference on Computer Vision, pages 477–
492. Springer.
Kehl, W., Manhardt, F., Tombari, F., Ilic, S., and Navab, N.
(2017). Ssd-6d: Making rgb-based 3d detection and
6d pose estimation great again. In Proceedings of the
IEEE International Conference on Computer Vision,
pages 1521–1529.
Kendall, A. and Cipolla, R. (2017). Geometric loss func-
tions for camera pose regression with deep learning.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 5974–5983.
Krull, A., Brachmann, E., Nowozin, S., Michel, F., Shot-
ton, J., and Rother, C. (2017). Poseagent: Budget-
constrained 6d object pose estimation via reinforce-
ment learning. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
6702–6710.
Lepetit, V., Moreno-Noguer, F., and Fua, P. (2009). Epnp:
An accurate o (n) solution to the pnp problem. Inter-
national journal of computer vision, 81(2):155.
Li, Y., Wang, G., Ji, X., Xiang, Y., and Fox, D. (2018).
Deepim: Deep iterative matching for 6d pose estima-
tion. In Proceedings of the European Conference on
Computer Vision (ECCV), pages 683–698.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International journal of computer
vision, 60(2):91–110.
Manhardt, F., Kehl, W., Navab, N., and Tombari, F. (2018).
Deep model-based 6d pose refinement in rgb. In Pro-
ceedings of the European Conference on Computer Vi-
sion (ECCV), pages 800–815.
Michel, F., Kirillov, A., Brachmann, E., Krull, A.,
Gumhold, S., Savchynskyy, B., and Rother, C. (2017).
Global hypothesis generation for 6d object pose esti-
mation. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition, pages 462–
471.
Oberweger, M., Rad, M., and Lepetit, V. (2018). Making
deep heatmaps robust to partial occlusions for 3d ob-
ject pose estimation. In Proceedings of the European
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
38

Conference on Computer Vision (ECCV), pages 119–
134.
Park, K., Patten, T., and Vincze, M. (2019). Pix2pose:
Pixel-wise coordinate regression of objects for 6d
pose estimation. In Proceedings of the IEEE Interna-
tional Conference on Computer Vision, pages 7668–
7677.
Pedregosa, F., Varoquaux, G., Gramfort, A., Michel, V.,
Thirion, B., Grisel, O., Blondel, M., Prettenhofer, P.,
Weiss, R., Dubourg, V., et al. (2011). Scikit-learn:
Machine learning in python. the Journal of machine
Learning research, 12:2825–2830.
Rad, M. and Lepetit, V. (2017). Bb8: A scalable, accurate,
robust to partial occlusion method for predicting the
3d poses of challenging objects without using depth.
In Proceedings of the IEEE International Conference
on Computer Vision, pages 3828–3836.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in neural information
processing systems, pages 91–99.
Tekin, B., Sinha, S. N., and Fua, P. (2018). Real-time seam-
less single shot 6d object pose prediction. In Proceed-
ings of the IEEE Conference on Computer Vision and
Pattern Recognition, pages 292–301.
To, T., Tremblay, J., McKay, D., Yamaguchi, Y., Leung,
K., Balanon, A., Cheng, J., and Birchfield, S. (2018).
Ndds: Nvidia deep learning dataset synthesizer.
Van der Walt, S., Sch
¨
onberger, J. L., Nunez-Iglesias, J.,
Boulogne, F., Warner, J. D., Yager, N., Gouillart, E.,
and Yu, T. (2014). scikit-image: image processing in
python. PeerJ, 2:e453.
Wang, C., Xu, D., Zhu, Y., Mart
´
ın-Mart
´
ın, R., Lu, C., Fei-
Fei, L., and Savarese, S. (2019). Densefusion: 6d ob-
ject pose estimation by iterative dense fusion. In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition, pages 3343–3352.
Wu, C. et al. (2011). Visualsfm: A visual structure from
motion system, 2011. URL http://www. cs. washing-
ton. edu/homes/ccwu/vsfm, 14:2.
Xiang, Y., Schmidt, T., Narayanan, V., and Fox, D. (2017).
Posecnn: A convolutional neural network for 6d ob-
ject pose estimation in cluttered scenes. arXiv preprint
arXiv:1711.00199.
Zhao, W., Zhang, S., Guan, Z., Luo, H., Tang, L., Peng,
J., and Fan, J. (2020). 6d object pose estimation via
viewpoint relation reasoning. Neurocomputing.
Accurate 6D Object Pose Estimation and Refinement in Cluttered Scenes
39
