
Generating Synthetic Training Data for
Deep Learning-based UAV Trajectory Prediction
Stefan Becker
1 a
, Ronny Hug
1 b
, Wolfgang Huebner
1 c
,
Michael Arens
1 d
and Brendan T. Morris
2 e
1
Fraunhofer Center for Machine Learning, Fraunhofer IOSB, Ettlingen, Germany
2
University of Nevada, Las Vegas, U.S.A.
Keywords:
Unmanned-Aerial-Vehicle (UAV), Synthetic Data Generation, Trajectory Prediction, Deep-learning,
Recurrent Neural Networks (RNNs), Training Data, Quadrotors.
Abstract:
Deep learning-based models, such as recurrent neural networks (RNNs), have been applied to various se-
quence learning tasks with great success. Following this, these models are increasingly replacing classic
approaches in object tracking applications for motion prediction. On the one hand, these models can cap-
ture complex object dynamics with less modeling required, but on the other hand, they depend on a large
amount of training data for parameter tuning. Towards this end, we present an approach for generating syn-
thetic trajectory data of unmanned-aerial-vehicles (UAVs) in image space. Since UAVs, or rather quadrotors
are dynamical systems, they can not follow arbitrary trajectories. With the prerequisite that UAV trajectories
fulfill a smoothness criterion corresponding to a minimal change of higher-order motion, methods for plan-
ning aggressive quadrotors flights can be utilized to generate optimal trajectories through a sequence of 3D
waypoints. By projecting these maneuver trajectories, which are suitable for controlling quadrotors, to image
space, a versatile trajectory data set is realized. To demonstrate the applicability of the synthetic trajectory
data, we show that an RNN-based prediction model solely trained on the generated data can outperform clas-
sic reference models on a real-world UAV tracking dataset. The evaluation is done on the publicly available
ANTI-UAV dataset.
1 INTRODUCTION
The rise of unmanned-aerial-vehicles (UAVs), such
as quadrotors, in the consumer market has led to con-
cerns about associated potential risks for security or
privacy. The potential intended or unintended mis-
uses pertain to various areas of public life, includ-
ing locations, such as airports, mass events, or public
demonstrations (Laurenzis et al., 2020). Thus, auto-
mated UAV detection and tracking have become in-
creasingly important for security services for antici-
pating UAV behavior. Video-based solutions offer the
benefit of covering large areas and are cost-effective
to acquire (Sommer et al., 2017). The basic compo-
nents of such a video-based approach are the appear-
ance model and the prediction model which is tradi-
a
https://orcid.org/0000-0001-7367-2519
b
https://orcid.org/0000-0001-6104-710X
c
https://orcid.org/0000-0001-5634-6324
d
https://orcid.org/0000-0002-7857-0332
e
https://orcid.org/0000-0002-8592-8806
tionally realized with Bayesian filter. The prediction
model tasks within detection and tracking pipelines,
among others, are the prediction of the object be-
havior and bridging detection failures. Following the
success of deep learning-based models in various se-
quence processing tasks, these models become the
standard choice for object motion prediction. A sig-
nificant drawback of deep learning models is the re-
quirement of a large amount of training data.
In order to overcome the problem of limited train-
ing data in the context of UAV tracking in image se-
quences, this paper proposes to utilize methods from
planning aggressive UAV flights to generate suitable
and versatile trajectories. The synthetically generated
3D trajectories are mapped into image space before
they serve as training data for deep learning predic-
tion models.
Despite the increasing number of trajectory
datasets for object classes like pedestrians (e.g., Tra-
jNet++ dataset (Kothari et al., 2021)) or vehicles
(e.g., InD dataset (Bock et al., 2020)), datasets with
Becker, S., Hug, R., Huebner, W., Arens, M. and Morris, B.
Generating Synthetic Training Data for Deep Learning-based UAV Trajectory Prediction.
DOI: 10.5220/0010621400003061
In Proceedings of the 2nd International Conference on Robotics, Computer Vision and Intelligent Systems (ROBOVIS 2021), pages 13-21
ISBN: 978-989-758-537-1
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
13

UAV trajectories and UAV in general are very lim-
ited. For the aforementioned object classes of pedes-
trians and vehicles, mostly RNN-based deep learning
models are successfully applied for trajectory predic-
tion (Alahi et al., 2016). Independent of the existing
deep learning variants for trajectory prediction relying
on generative adversarial networks (GANs) (Amirian
et al., 2019; Gupta et al., 2018), temporal convolu-
tion networks (TCNs) (Becker et al., 2018; Nikhil and
Morris, 2018), and transformers (Giuliari et al., 2021;
Saleh, 2020), an RNN-based prediction model is cho-
sen as reference. The reader is referred to these sur-
veys (Rasouli, 2020; Rudenko et al., 2020; Kothari
et al., 2021) for a comprehensive overview of current
deep learning-based approaches for trajectory predic-
tion.
Although the focus is on motion prediction and
not on appearance modeling for UAV detection and
tracking, we throw a brief glance at some of the
current approaches that rely on images or use other
modalities. Besides image-based methods, common
modalities for UAV detections are RADAR, acous-
tics, radio-frequencies, and LIDAR. Comparisons of
key characteristics of different deep learning-based
approaches on single or fused modality information
are presented in Samaras et al. (2019); Taha and
Shoufan (2019); Unlu et al. (2019). A review with the
focus on radar-based UAV detection methods is given
by Christnacher et al. (2016). Approaches for acous-
tic sensors are, for example, presented in the work of
Kartashov et al. (2020) and Jeon et al. (2017). An ex-
ample to detect and identify UAVs based on their ra-
dio frequency signature is the approach of Xiao and
Zhang (2019). For LIDAR, there exist, for exam-
ple, the approaches of Hammer et al. (2019, 2018).
Image-based approaches can be divided into using
electro-optical sensors or infrared sensors. Their ap-
pearance modeling, however, is very similar. A fur-
ther division can be made into one-stage strategies
or two-stage strategies. In one-stage strategies, a di-
rect classification and localization is applied. In two-
stage strategies, a general (moving) object detection
is followed by a classification step. For fixed cam-
eras, the latter strategy is preferred. Different image-
based approaches are, for example, presented in Schu-
mann et al. (2018); Schumann et al. (2017), Sommer
et al. (2017), M
¨
uller and Erdn
¨
uß (2019), and Rozant-
sev et al. (2017).
The paper is structured as follows. Section 2
presents the proposed methods for generating realis-
tic UAV trajectory data in image sequences. Section
3 briefly introduces the used RNN-based UAV trajec-
tory prediction model. In addition to an analysis of
the diversity of the synthetically generated data, sec-
tion 4 includes an evaluation on the real-world ANTI-
UAV dataset (Jiang et al., 2021). Finally, a conclusion
is given in section 5.
2 SYNTHETIC DATA
GENERATION
In this section the proposed approach for generating
realistic, synthetic trajectory data is presented.
Minimum Snap Trajectories (MST): UAVs can not
fly arbitrary trajectories due to the fact that they are
dynamical systems with strict constraints on achiev-
able velocities, accelerations and inputs. These con-
straints determine optimal trajectories with a series
of waypoints in a set of positions and orientations
in conjunction with control inputs (Mellinger, 2012).
Thus, the goal of trajectory generation in control-
ling UAVs is to generate inputs to the motion con-
trol system, which ensures that the planned trajec-
tory can be executed. Here, we apply an explicit
optimization method that enables autonomous, ag-
gressive, high-speed quadrotor flight through com-
plex environments. In the remainder of this paper, the
terms quadrotor and UAV are used interchangeably,
although there exist various other UAV concepts. The
principle procedure can be adapted to all other de-
signs. Since we are only interested in the trajectory
data, the actual control design can, to some extent, be
neglected as long as the planned target trajectory is
suitable for control.
Minimum snap trajectories (MST) have proven
very effective as quadrotor trajectories since the mo-
tor commands and attitude accelerations of the UAV
are proportional to the snap, or the fourth derivative,
of the path (Richter et al., 2016). Of course, the
difference between the target trajectory and the exe-
cuted trajectory depends on the actual controller and
physical limitations (e.g., maximum speed) of a UAV.
Firstly, physical constraints can be considered in plan-
ning. Secondly, in most cases, a well-designed con-
troller can closely follow the target trajectory. For
our purpose, the trajectory of the actual flight can, in
a way, be seen as only a slight variation of the tar-
get trajectory. However, quadrotor dynamics relying
on four control inputs (i
1
,··· ,i
4
) for nested feedback
control (inner attitude control loop and outer position
control loop, see for example Michael et al. (2010))
are differential flat (Mellinger and Kumar, 2011). In
other words, the states and the inputs can be written as
functions of four selected flat outputs and their deriva-
tives. This facilitates the automated generation of tra-
jectories since any smooth trajectory (with reasonably
bounded derivatives) in the space of flat outputs can
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
14
zoomed-in detail
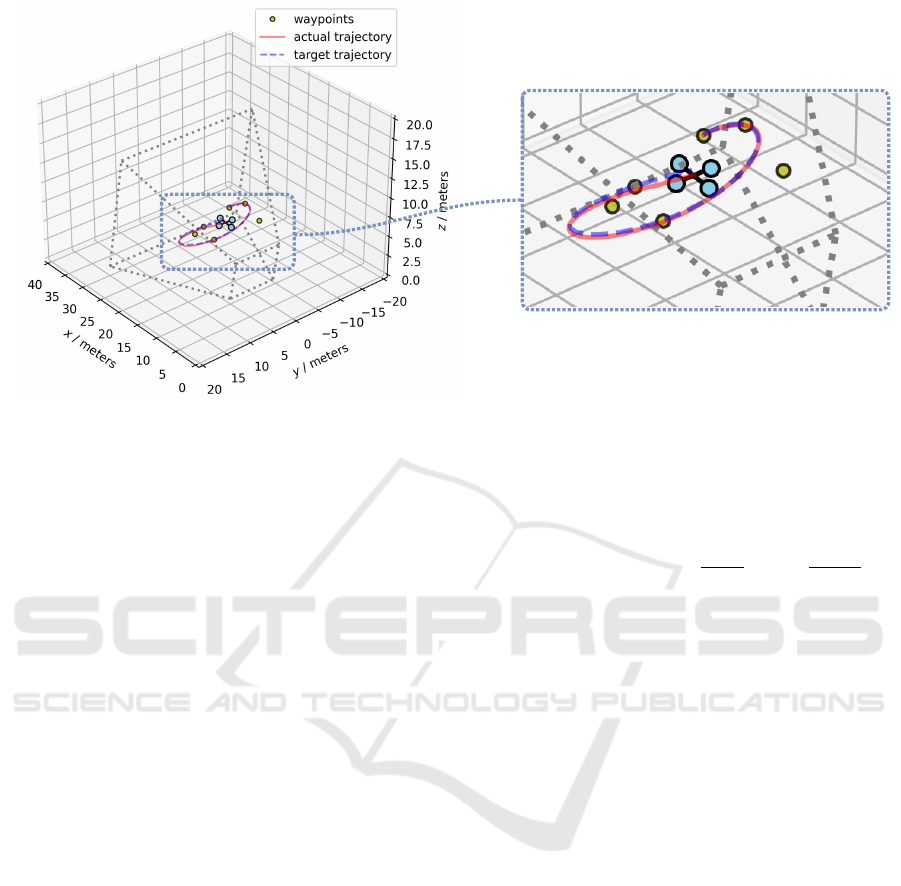
Figure 1: Visualization of a generated MST (target trajectory) along waypoints in the viewing frustum of a camera. The MST
is highlighted in purple. The sampled waypoints in the viewing frustum of the camera are shown in yellow. The corresponding
UAV flights with a PD controller as proposed from Michael et al. (2010) are shown in red.
be followed by the quadrotor. Following Mellinger et
al., the flat outputs are given by p = [r
|
,ψ]
|
, where
r = [x,y, z]
|
are the coordinates of the center of mass
in the world coordinate system and ψ is the yaw an-
gle. The flat outputs at a given time t are given by
p(t), which defines a smooth curve. A waypoint de-
notes a position in space along a yaw angle. Tra-
jectory planning specifies navigating through m way-
points at specified times by staying in a safe corridor.
Trivial trajectories such as straight lines lead to dis-
continuities in higher-order motion. Thus, such tra-
jectories are undesirable because they include infinite
curvatures at waypoints, which require the quadro-
tor to stop at each waypoint. The differentiability of
polynomial trajectories makes them a natural choice
for use in a differentially flat representation of the
quadrotor dynamics. Thus, for following a specific
trajectory p
T
(t) = [r
|
T
,ψ
T
(t)]
|
(with controller for a
UAV), the smooth trajectory p
T
(t) is defined as piece-
wise polynomial functions of order n over m time in-
tervals:
p
T
(t) =
∑
n
i=0
p
T
i1
(t
i
) t
0
6 t 6 t
1
∑
n
i=0
p
T
i2
(t
i
) t
1
6 t 6 t
2
.
.
.
∑
n
i=0
p
T
im
(t
i
) t
m−1
6 t 6 t
m
(1)
The goal is to find trajectories that minimize func-
tionals which can be written using these basis func-
tions. These kinds of problems can be solved with
tools from the calculus of variations and are standard
problems in robotics (Craig, 1989). Hence, in order to
find the smooth target trajectory p
T
(t)
tar
, the integral
of the k
r
th
derivative of position squared and the k
ψ
th
derivative of yaw angle squared is minimized:
p
T
(t)
tar
= arg min
p
T
(t)
Z
t
m
t
o
c
r
d
k
r
r
T
dt
k
r
2
+ c
ψ
d
k
ψ
ψ
T
dt
k
ψ
2
dt
(2)
Here, c
r
and c
ψ
are constants to make the inte-
grand non-dimensional. Continuity of the k
r
deriva-
tives of r
T
and k
ψ
derivatives of ψ
T
is enforced as a
criterion for smoothness. In other words, the conti-
nuity of the derivatives determines the boundary con-
ditions at the waypoints. As mentioned above, some
UAV control input depends on the fourth derivative
of the positions and the second derivative of the yaw.
Accordingly, p
T
(t)
tar
is calculated by minimizing the
integral of the square of the norm of the snap (k
r
= 4),
and for the yaw angle, k
ψ
= 2 holds.
The above problem can be formulated as a
quadratic problem QP (Bertsekas, 1999). Thereby,
p
T
i j
= [x
T
i j
,y
T
i j
,z
T
i j
,ψ
T
i j
]
|
are written as a 4nm × 1
vector~c with decision variables {x
T
i j
,y
T
i j
,z
T
i j
,ψ
T
i j
}:
min ~c
|
Q~c +
~
f
|
~c
subject to A~c ≤
~
b. (3)
Here, the objective function incorporates the mini-
mization of the functional while the constraints can
be used to satisfy constraints on the flat outputs and
their derivatives and thus constraints on the states and
the inputs. The initial conditions, final condition, or
intermediate condition on any derivative of the trajec-
tory are specified as equality constraint in 3. For a
more detailed explanation on generating MSTs, how
to incorporate corridor constraints, and how to calcu-
Generating Synthetic Training Data for Deep Learning-based UAV Trajectory Prediction
15
late the angular velocities, angular accelerations, to-
tal thrust, and moments required over the entire tra-
jectory for the controller, the reader is referred to the
work of Mellinger and Kumar (2011). Richter et al.
(2016) presented an extended version of MST gener-
ation, where the solution of the quadratic problem is
numerically more stable.
Training Data Generation: With the described
method, we can generate MSTs suitable to aggressive
maneuver flights for UAV control in a 3D environ-
ment. In order to generate versatile trajectory data
in image space, further steps are required. The over-
all generation pipeline is explained in the following.
Firstly, a desired camera model with known intrin-
sic parameters is selected. The selection depends on
the targeted sensor set-up of the detection and track-
ing system. In our case, we choose a pinhole cam-
era model without distortion effects loosely orientated
on the ANTI-UAV dataset (Jiang et al., 2021) with re-
gard to an intermediate image resolution (in pixels)
(1176 × 640) between the infrared (640 × 512) and
electro-optical camera (1920 × 1080) resolutions of
the ANTI-UAV dataset. In case all camera parame-
ters are known, the corresponding distortion coeffi-
cient should be considered. In the experiments the
focal length (in pixels) is set to 1240, the princi-
ple point coordinates (in pixels) are set to p
x
= 579,
p
y
= 212. For setting up the external parameters, the
camera is placed close to the ground plane sampled
from an uniform distribution Uni(1m,2m) to set the
height above ground. The inclination angle is sam-
pled from Uni(10°, 20°). Given the fixed camera pa-
rameters, the viewing frustum is calculated for a cho-
sen near distance to the camera center (d
near
= 10m)
and a far distance to the camera center (d
f ar
= 30m).
For generating a single MST, a set of waypoints in-
side the viewing frustum is sampled. The number
of waypoints is randomly varied between 3 and 7.
The travel time for each segment is approximated
by using the Euclidean distance between two way-
points and a sampled constant speed for the UAV
Uni(1m/s,8m/s). The resulting straight-line trajec-
tory serves as an initial solution of the MST calcu-
lation. The frame rate of the camera is sampled from
Uni(10 f ps,20 f ps) for every run. In our experiments,
we assumed a completely free space in the viewing
frustum. As mentioned, corridor constraints, which
can be used for simulating an object to fly through,
can be integrated with the method of Mellinger and
Kumar (2011). For the synthetic training dataset,
1000 MSTs are generated. The main steps for the
synthetic data generation pipeline of a single run are
as follows:
• Selection of a desired camera model with known
intrinsic parameters.
• Extrinsic parameters are sampled from the height
and inclination angle distribution.
• Calculation of the corresponding viewing frustum
with d
near
and d
f ar
.
• Sampling of waypoints inside viewing frustum.
• Estimation of the initial solution with fixed, sam-
pled UAV speed.
• MST trajectory generation using the method of
Mellinger and Kumar (2011).
• Projection of the 3D center of mass positions of
the MST to image space using the camera parame-
ters at fixed time intervals (reciprocal of the drawn
frame rate of a single run).
This procedure is repeated until the desired num-
ber of samples are generated. Note that sanity checks
and abort criteria for the trajectory are applied at the
end and during every run. For example, requirements
on the minimum and maximum length of consecu-
tive image points. In Figure 1, generated MSTs along
sampled waypoints in a 3D-environment are visual-
ized. The viewing frustum for a fixed inclination an-
gle of 15° is shown as a dotted gray line. The actual
flight trajectory of a UAV is realized with a propor-
tional–derivative (PD) controller as is proposed by
Michael et al. (2010). Although the controller de-
sign is relatively simple, the UAV can closely follow
the target trajectory. Thus, directly using the planned
MST seems to be a legitimate design choice.
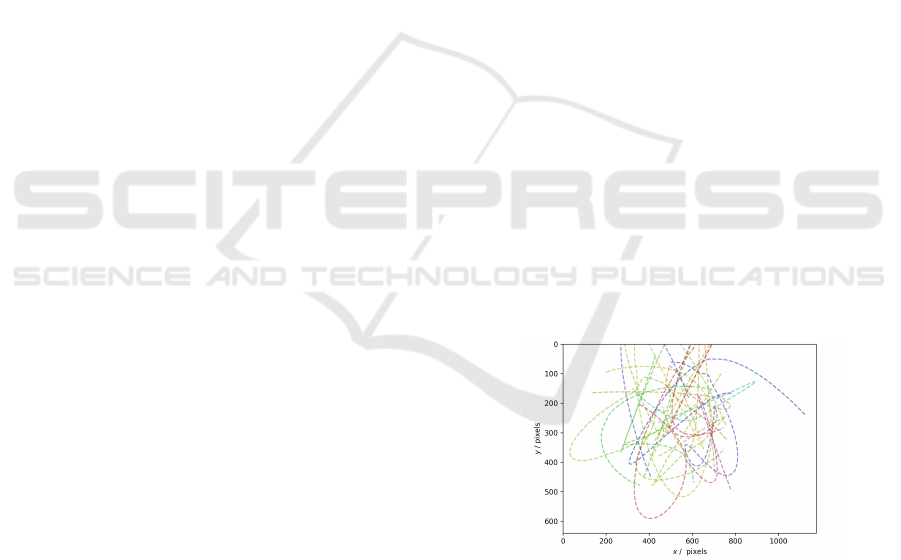
Figure 2: Visualization of generated UAV trajectories as ob-
served from the camera.
In Figure 2, exemplary generated training samples
are depicted. The figure illustrates the diversity in
the generated trajectory data reflecting several motion
prototypes present in trajectory data. A more detailed
analysis of the diversity and suitability of the gener-
ated synthetic data is given in section 4. Before that,
we will briefly introduce the deep learning-based ref-
erence prediction model.
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
16
2D image space
zoomed-in detail
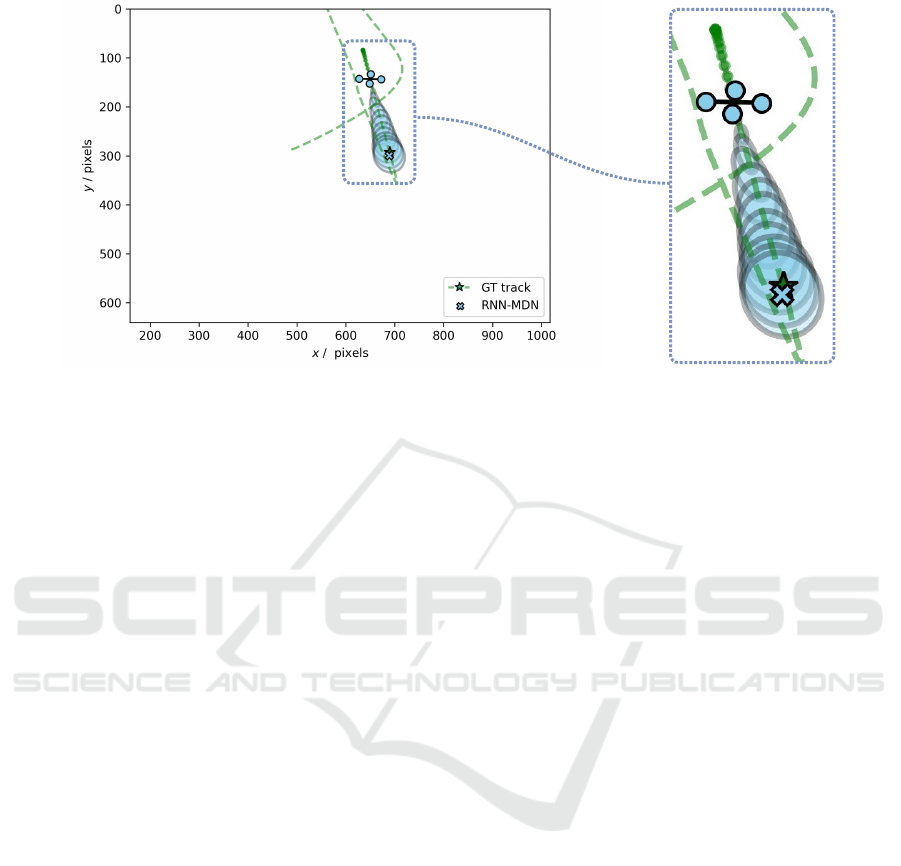
Figure 3: Visualization of the predicted distribution of an RNN-MDN on a synthetic UAV trajectory in image space for 12
steps into the future (on the left). A corresponding zoomed-in detail is shown on the right. The corresponding position of the
ground truth (GT) track is highlighted with a green star.
3 PREDICTION MODEL
For trajectory prediction, an RNN-based model is
considered, which predicts a distribution over the next
N image positions and is conditioned on the previ-
ous observations ~u
0:t
. ~u
0:t
are the image coordinates
from time 0 up to t. As mentioned above, RNN-based
models are a common choice from the variants of
deep learning-based models for trajectory prediction.
For generating the distribution over the next positions,
the model outputs the parameter of a mixture den-
sity network (MDN). Such RNN-MDNs are applied
to capture the motion of different object types. Orig-
inated from a model introduced by Graves (2014),
modified versions have been successfully utilized to
predict pedestrian (Alahi et al., 2016), vehicle (Deo
and Trivedi, 2018) or cyclist (Pool et al., 2021) mo-
tions. Although these modified versions also incor-
porate some contextual cues (e.g., interactions from
other objects), single objects motion is encoded with
such an RNN-MDN variant.
Given an input sequence U of consecutive observed
image positions ~u
t
= (u
t
,v
t
) at time step t along a tra-
jectory, the model generates a probability distribution
over future positions {~u
t+1
,...,~u
t+N
}. The model is
realized as an RNN encoder. With an embedding of
the inputs and using a single Gaussian component, the
model can be defined as follows:
~e
t
= EMB(~u
t
;
~
Θ
e
),
~
h
t
= RNN(
~
h
t−1
,~e
t
;
~
Θ
RNN
),
{
ˆ
~µ
t+n
,
ˆ
Σ
t+n
}
N
n=1
= MLP(
~
h
t
;
~
Θ
MLP
) (4)
Here, RNN(·) is the recurrent network,
~
h the hid-
den state of the RNN, MLP(·) the multilayer percep-
tron, and EMB(·) an embedding layer.
~
Θ represents
the weights and biases of the MLP, EMB, or respec-
tively of the RNN. The model is trained by maximiz-
ing the likelihood of the data given the output Gaus-
sian distribution. This results in the following loss
function:
L(U) = −
N
∑
n=1
−logN (~u
t+n
|
ˆ
~µ
t+n
,
ˆ
Σ
t+n
). (5)
Implementation Details: The RNN-MDN is imple-
mented using Tensorflow (Abadi et al., 2015) and is
trained for 2000 epochs using an ADAM optimizer
(Kingma and Ba, 2015) with a decreasing learning
rate, starting from 0.01 with a learning rate decay of
0.95 and a decay factor of
1
/10. The RNN hidden state
and embedding dimension is 64. For the experiments,
the long short-term memory (LSTM) (Hochreiter and
Schmidhuber, 1997) RNN variant is utilized.
An example prediction of the RNN-MDN on a syn-
thetically generated UAV trajectory in image space is
depicted in Figure 3. On the left, the predicted dis-
tribution for 12 steps into the future is shown in blue.
The corresponding ground truth position is marked as
a green star. On the right, the corresponding 3D UAV
trajectory is shown in green.
Generating Synthetic Training Data for Deep Learning-based UAV Trajectory Prediction
17
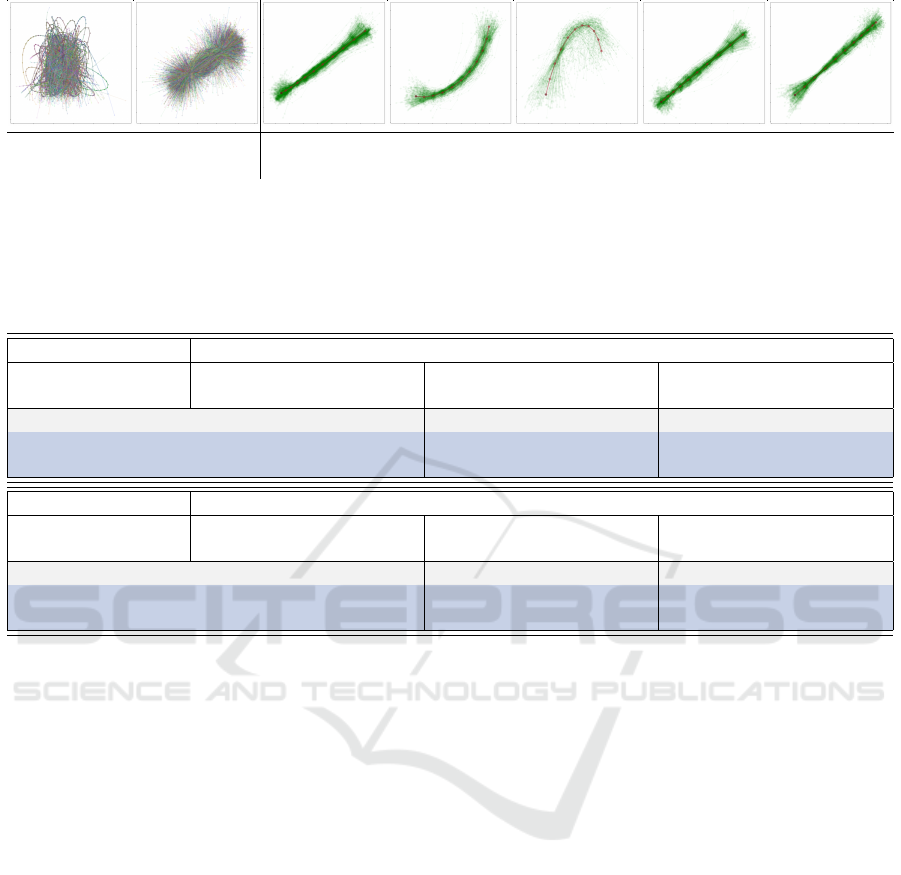
Data Aligned Data Constant Curve (l) Curve (r) Acceleration Deceleration
Prototypes
Figure 4: Data, aligned data and learned prototypes for the synthetic UAV trajectories projected to image space. The pro-
totypes represent different motion patterns (from left to right): Constant velocity, curvilinear motion (left and right curve),
acceleration and deceleration.
Table 1: Results for a comparison between the an RNN-MDN prediction model trained on the synthetic generated data, a
Kalman filter with CV motion model, and using linear interpolation. The prediction is done for 8, 10, and 16 frames into the
future.
EO (1920 × 1080)
8/8 8/10 8/12
Approach FDE/pixels σ
FDE
/pixels FDE/pixels σ
FDE
/pixels FDE/pixels σ
FDE
/pixels
RNN-MDN 60.304 35.202 82.780 46.124 121.453 55.489
Kalman filter (CV) 81.061 60.333 110.041 84.530 179.459 104.408
Linear interpolation 86.998 67.113 119.106 89.067 183.558 108.522
IR (640 × 512)
8/8 8/10 8/12
Approach FDE/pixels σ
FDE
/pixels FDE/pixels σ
FDE
/pixels FDE/pixels σ
FDE
/pixels
RNN-MDN 20.849 18.604 41.378 21.100 61.459 24.490
Kalman filter (CV) 22.340 24.630 43.172 32.522 68.012 37.047
Linear interpolation 24.235 26.517 45.434 35.837 69.665 37.714
4 EVALUATION & ANALYSIS
This section analyzes the diversity of the generated
synthetic data and the suitability for training deep-
learning prediction models.
Diversity Analysis: For analyzing the diversity of the
synthetically generated data, we use the approach of
Hug et al. (2021). The approach learns a representa-
tion of the provided trajectory data by first employing
a spatial sequence alignment, which enables a subse-
quent learning vector quantization (LVQ) stage. Each
trajectory dataset can be reduced to a small number
of prototypical sub-sequences specifying distinct mo-
tion patterns, where each sample can be assumed to
be a variation of these prototypes (Hug et al., 2020).
Thus, the resulting quantized representation of the
trajectory data, the prototypes, reflect basic motion
patterns, such as constant or curvilinear motion,
while variations occur primarily in position, orienta-
tion, curvature and scale. For further details on the
dataset analysis methods, the reader is referred to the
work of Hug et al. (2021). The resulting prototypes
of the generated training data are depicted in Figure 4.
The learned prototypes show that the generated
synthetic data includes several different motion pat-
terns. Besides, the diversity of the learned prototypes
is visible. The dataset consists of, for example,
distinguishable motion patterns reflecting constant
velocity motion, curvilinear motion, acceleration,
and deceleration.
Suitability Analysis: In order to analyze the suitabil-
ity of the generated trajectory data, the RNN-MDN
is trained as an exemplary deep learning-based pre-
diction model according to section 3. For evaluation,
the real-world ANTI-UAV dataset (Jiang et al., 2021)
is used. The dataset consists of 100 high-quality,
full HD video sequences (both electro-optical (EO)
and infrared (IR)), spanning multiple occurrences of
multi-scale UAVs, annotated with bounding boxes.
As inputs for the prediction models, the center po-
sitions of the provided annotations are used. As clas-
sical reference models, a Kalman filter with a con-
stant velocity (CV) motion model and linear interpo-
lation are utilized. For the Kalman filter, the obser-
vation noise is assumed to be a white Gaussian noise
process ~w
t
∼ N (0,(1.5pixels)
2
). Thereby, the uncer-
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
18
IR Sequence: 20190925 183946 1 6 IR Sequence: 20190925 152412 1 1
EO Sequence: 20190925 131530 1 5 EO Sequence: 20190925 133630 1 7
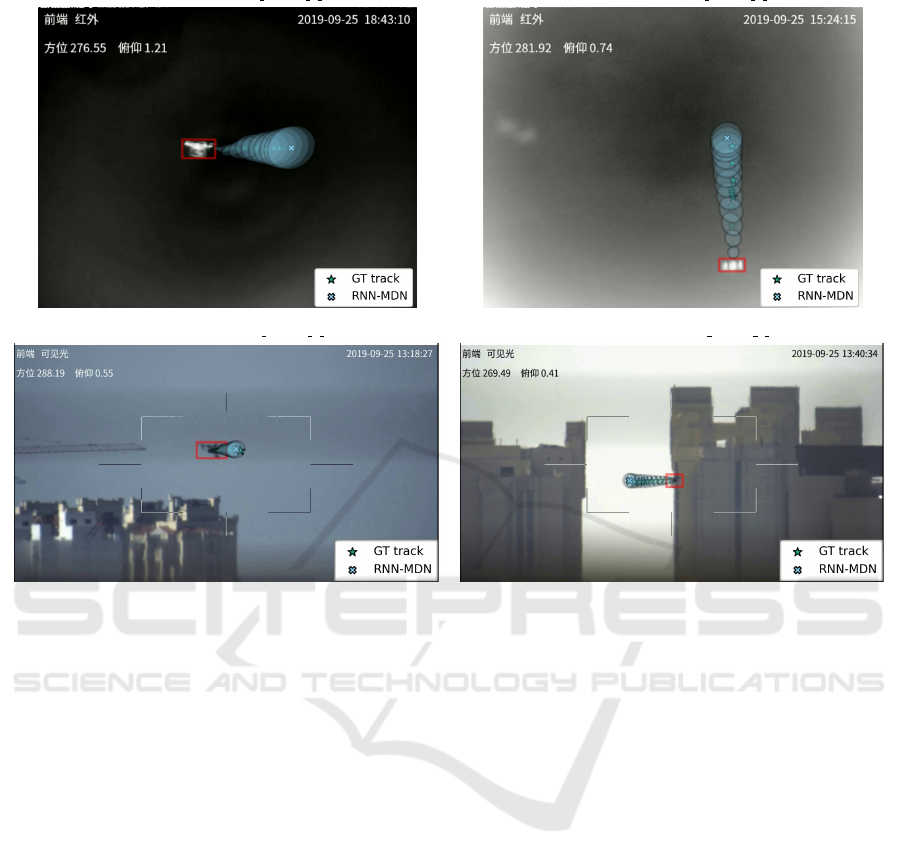
Figure 5: Example predictions for the Anti-UAV dataset Jiang et al. (2021). The top images show two samples from the IR
sequences. The bottom images depict two samples from the EO sequences.
tainty in the annotation is considered. The process
noise is modeled as the acceleration increment during
a sampling interval (white noise acceleration model
Bar-Shalom et al. (2002)) with σ
2
CV
= 0.5
pixels
/f rame
2
.
For dealing with the minor annotation uncertainty, a
small white Gaussian noise is added to the generated
trajectory positions corresponding to the assumed ob-
servation noise. Since RNN are able to generalize
from noisy inputs up to an extent (see for example
(Becker et al., 2018)), the noisy trajectories are used
for conditioning during training of the RNN-MDN.
The performance is compared with the final displace-
ment error (FDE) for three different time-horizons, in
particular, 8 frames, 10 frames, and 12 frames into
the future. The FDE is calculated as the average Eu-
clidean distance between the predicted final positions
and the ground truth positions.
The results for the EO and the IR video sequences
are summarized in table 1. Although the RNN-MDN
is solely trained on the synthetically generated UAV
data, the model could outperform the traditional ref-
erence models on the EO and the IR sequences of the
ANTI-UAV dataset. It should be noted that no cam-
era motion compensation is applied. Thus, the re-
sults of all considered prediction models can be fur-
ther improved. For longer prediction horizons, all er-
rors are relatively high due to the maneuvering be-
havior of the UAVs. However, in case the predic-
tion model is utilized to bridge detection failures for
supporting the appearance model of the detection and
tracking pipeline, the number of subsequent failures
should be lower than the shown 12 frames time hori-
zon. Since the RNN-MDN relying on synthetic data
achieved better performance than the reference mod-
els, it is better suited to anticipate the short-term UAV
behavior. In Figure 5, the predicted distributions of
future positions are visualized for the EO sequences
or respectively IR sequences. The ground truth future
positions are highlighted as green stars. The covari-
ance ellipses around the predicted position are shown
in blue. The final predicted positions are marked as a
blue cross.
5 CONCLUSION
This paper presents an approach for generating syn-
thetic trajectory data of UAVs in image space. By
utilizing methods for planning maneuvering UAV
flights, minimum snap trajectories along a sequence
Generating Synthetic Training Data for Deep Learning-based UAV Trajectory Prediction
19

of 3D waypoints are generated. By selecting the de-
sired camera model with known camera parameters,
the trajectories can be projected to the observer’s per-
spective. To demonstrate the applicability of the syn-
thetic trajectory data, we show that an RNN-MDN
prediction model solely trained on the synthetically
generated data is able to outperform classic reference
models on a real-world UAV tracking dataset.
REFERENCES
Abadi, M. et al. (2015). TensorFlow: Large-scale machine
learning on heterogeneous systems. Software avail-
able from tensorflow.org. 5
Alahi, A., Goel, K., Ramanathan, V., Robicquet, A., Fei-
Fei, L., and Savarese, S. (2016). Social LSTM: Hu-
man Trajectory Prediction in Crowded Spaces. In
Conference on Computer Vision and Pattern Recog-
nition (CVPR), pages 961–971. 2, 5
Amirian, J., Hayet, J.-B., and Pettre, J. (2019). Social
Ways: Learning Multi-Modal Distributions of Pedes-
trian Trajectories With GANs. In Conference on
Computer Vision and Pattern Recognition Workshops
(CVPRW), pages 2964–2972. 2
Bar-Shalom, Y., Kirubarajan, T., and Li, X.-R. (2002). Esti-
mation with Applications to Tracking and Navigation.
John Wiley & Sons, Inc., New York, NY, USA. 7
Becker, S., Hug, R., H
¨
ubner, W., and Arens, M. (2018).
RED: A simple but effective Baseline Predictor for
the TrajNet Benchmark. In The European Confer-
ence on Computer Vision Workshops (ECCVW), vol-
ume 11131 of Lecture Notes in Computer Science,
pages 138–153. Springer. 2, 7
Bertsekas, D. (1999). Nonlinear Programming. Athena Sci-
entific. 3
Bock, J., Krajewski, R., Moers, T., Runde, S., Vater, L., and
Eckstein, L. (2020). The ind dataset: A drone dataset
of naturalistic road user trajectories at german inter-
sections. 2020 IEEE Intelligent Vehicles Symposium
(IV), pages 1929–1934. 1
Christnacher, F., Hengy, S., Laurenzis, M., Matwyschuk,
A., Naz, P., Schertzer, S., and Schmitt, G. (2016). Op-
tical and acoustical UAV detection. In Kamerman,
G. and Steinvall, O., editors, Electro-Optical Remote
Sensing X, volume 9988, pages 83 – 95. International
Society for Optics and Photonics, SPIE. 2
Craig, J. (1989). Introduction to Robotics: Mechanics and
Control. Addison-Wesley Longman Publishing Co.,
Inc., USA, 2nd edition. 3
Deo, N. and Trivedi, M. M. (2018). Multi-modal trajec-
tory prediction of surrounding vehicles with maneuver
based lstms. In 2018 IEEE Intelligent Vehicles Sym-
posium (IV), pages 1179–1184. 5
Giuliari, F., Hasan, I., Cristani, M., and Galasso, F. (2021).
Transformer Networks for Trajectory Forecasting.
In International Conference on Pattern Recognition
(ICPR), pages 10335–10342. 2
Graves, A. (2014). Generating sequences with recurrent
neural networks. 5
Gupta, A., Johnson, J., Fei-Fei, L., Savarese, S., and Alahi,
A. (2018). Social GAN: Socially Acceptable Trajec-
tories with Generative Adversarial Networks. In Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 2255–2264. 2
Hammer, M., Borgmann, B., Hebel, M., and Arens, M.
(2019). UAV detection, tracking, and classification by
sensor fusion of a 360° lidar system and an alignable
classification sensor. In Turner, M. D. and Kamerman,
G. W., editors, Laser Radar Technology and Applica-
tions XXIV, volume 11005, pages 99 – 108. Interna-
tional Society for Optics and Photonics, SPIE. 2
Hammer, M., Hebel, M., Laurenzis, M., and Arens, M.
(2018). Lidar-based detection and tracking of small
UAVs. In Buller, G. S., Hollins, R. C., Lamb, R. A.,
and Mueller, M., editors, Emerging Imaging and Sens-
ing Technologies for Security and Defence III; and
Unmanned Sensors, Systems, and Countermeasures,
volume 10799, pages 177 – 185. International Society
for Optics and Photonics, SPIE. 2
Hochreiter, S. and Schmidhuber, J. (1997). Long Short-
Term Memory. Neural Computation, 9(8):1735–
1780. 5
Hug, R., Becker, S., H
¨
ubner, W., and Arens, M. (2021).
Quantifying the complexity of standard benchmark-
ing datasets for long-term human trajectory predic-
tion. IEEE Access, 9:77693–77704. 6
Hug, R., Becker, S., H
¨
ubner, W., and Arens, M. (2020).
A short note on analyzing sequence complexity in tra-
jectory prediction benchmarks. In Workshop on Long-
term Human Motion Prediction (LHMP). 6
Jeon, S., Shin, J., Lee, Y., Kim, W., Kwon, Y., and Yang,
H. (2017). Empirical study of drone sound detection
in real-life environment with deep neural networks. In
European Signal Processing Conference (EUSIPCO),
pages 1858–1862. 2
Jiang, N., Wang, K., Peng, X., Yu, X., Wang, Q., Xing, J.,
Li, G., Zhao, J., Guo, G., and Han, Z. (2021). Anti-
uav: A large multi-modal benchmark for uav tracking.
2, 4, 6, 7
Kartashov, V., Oleynikov, V., Koryttsev, I., Sheiko, S.,
Zubkov, O., Babkin, S., and Selieznov, I. (2020). Use
of acoustic signature for detection, recognition and
direction finding of small unmanned aerial vehicles.
In 2020 IEEE 15th International Conference on Ad-
vanced Trends in Radioelectronics, Telecommunica-
tions and Computer Engineering (TCSET), pages 1–4.
2
Kingma, D. and Ba, J. (2015). Adam: A method for
stochastic optimization. In International Conference
on Learning Representations (ICLR). 5
Kothari, P., Kreiss, S., and Alahi, A. (2021). Human trajec-
tory forecasting in crowds: A deep learning perspec-
tive. IEEE Transactions on Intelligent Transportation
Systems, pages 1–15. 1, 2
Laurenzis, M., Rebert, M., Schertzer, S., Bacher, E., and
Christnacher, F. (2020). Prediction of MUAV flight
behavior from active and passive imaging in complex
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
20

environment. In Laser Radar Technology and Ap-
plications, volume 11410, pages 10–17. International
Society for Optics and Photonics, SPIE. 1
Mellinger, D. (2012). Trajectory Generation and Control
for Quadrotors. PhD thesis, University of Pennsylva-
nia. 2
Mellinger, D. and Kumar, V. (2011). Minimum snap tra-
jectory generation and control for quadrotors. In In-
ternational Conference on Robotics and Automation
(ICRA), pages 2520–2525. 2, 4
Michael, N., Mellinger, D., Lindsey, Q., and Kumar, V.
(2010). The grasp multiple micro-uav testbed. IEEE
Robotics Automation Magazine, 17(3):56–65. 2, 3, 4
M
¨
uller, T. and Erdn
¨
uß, B. (2019). Robust drone detection
with static VIS and SWIR cameras for day and night
counter-UAV. In Counterterrorism, Crime Fight-
ing, Forensics, and Surveillance Technologies, vol-
ume 11166, pages 58–72. International Society for
Optics and Photonics, SPIE. 2
Nikhil, N. and Morris, B. T. (2018). Convolutional Neu-
ral Network for Trajectory Prediction. In The Euro-
pean Conference on Computer Vision Workshops (EC-
CVW), volume 11131 of Lecture Notes in Computer
Science, pages 186–196. Springer. 2
Pool, E., Kooij, J. F. P., and Gavrila, D. M. (2021). Crafted
vs. learned representations in predictive models - a
case study on cyclist path prediction. IEEE Transac-
tions on Intelligent Vehicles, pages 1–1. 5
Rasouli, A. (2020). Deep Learning for Vision-based Pre-
diction: A Survey. arXiv preprint arXiv:2007.00095.
2
Richter, C., Bry, A., and Roy, N. (2016). Polyno-
mial Trajectory Planning for Aggressive Quadrotor
Flight in Dense Indoor Environments, pages 649–666.
Springer, Cham. 2, 4
Rozantsev, A., Lepetit, V., and Fua, P. (2017). Detecting
flying objects using a single moving camera. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 39(5):879–892. 2
Rudenko, A., Palmieri, L., Herman, M., Kitani, K. M.,
Gavrila, D. M., and Arras, K. O. (2020). Human Mo-
tion Trajectory Prediction: A Survey. The Interna-
tional Journal of Robotics Research, 39:895 – 935. 2
Saleh, K. (2020). Pedestrian Trajectory Prediction using
Context-Augmented Transformer Networks. arXiv
preprint arXiv:2012.01757. 2
Samaras, S., Diamantidou, E., Ataloglou, D., Sakellariou,
N., Vafeiadis, A., Magoulianitis, V., Lalas, A., Dimou,
A., Zarpalas, D., Votis, K., Daras, P., and Tzovaras,
D. (2019). Deep learning on multi sensor data for
counter uav applications—a systematic review. Sen-
sors, 19(22). 2
Schumann, A., Sommer, L., Klatte, J., Schuchert, T., and
Beyerer, J. (2017). Deep cross-domain flying ob-
ject classification for robust uav detection. In Inter-
national Conference on Advanced Video and Signal
Based Surveillance (AVSS), pages 1–6. 2
Schumann, A., Sommer, L., M
¨
uller, T., and Voth, S. (2018).
An image processing pipeline for long range UAV de-
tection. In Emerging Imaging and Sensing Technolo-
gies for Security and Defence III; and Unmanned Sen-
sors, Systems, and Countermeasures, volume 10799,
pages 186–194. International Society for Optics and
Photonics, SPIE. 2
Sommer, L., Schumann, A., M
¨
uller, T., Schuchert, T., and
Beyerer, J. (2017). Flying object detection for auto-
matic uav recognition. In International Conference
on Advanced Video and Signal Based Surveillance
(AVSS), pages 1–6. 1, 2
Taha, B. and Shoufan, A. (2019). Machine learning-based
drone detection and classification: State-of-the-art in
research. IEEE Access, 7:138669–138682. 2
Unlu, E., Zenou, E., Riviere, N., and Dupouy, P.-E. (2019).
Deep learning-based strategies for the detection and
tracking of drones using several cameras. IPSJ
Transactions on Computer Vision and Applications,
11(1):7. 2
Xiao, Y. and Zhang, X. (2019). Micro-uav detection and
identification based on radio frequency signature. In
International Conference on Systems and Informatics
(ICSAI), pages 1056–1062. 2
Generating Synthetic Training Data for Deep Learning-based UAV Trajectory Prediction
21
