
Viscoelastic Fluid Simulation based on the Combination of Viscous and
Elastic Stresses
Nobuhiko Mukai
1,2,3
, Ren Morooka
1
, Takuya Natsume
2
and Youngha Chang
1,2
1
Computer Science, Tokyo City University, 1-28-1 Tamazutsumi, Setagaya, Tokyo, Japan
2
Graduate School of Integrative Science and Engineering, Tokyo City University,
1-28-1 Tamazutsumi, Setagaya, Tokyo, Japan
3
Institute of Industrial Science, the University of Tokyo, 4-6-1, Komaba, Meguro, Tokyo, Japan
Keywords:
Particle Method, Viscoelastic Fluid, Spinnability, Cauchy’s Equation of Motion, Constitutive Equation.
Abstract:
It is one of the challenging issues to simulate and visualize liquid behavior, especially the behavior of the
viscoelastic fluid because it has both characteristics of viscosity and elasticity. Although Newtonian fluid,
which sharing stress is proportional to the velocity gradient, is often analyzed with the ordinal governing
equations that are Navier-Stokes equation and the equation of continuity, viscoelastic fluid behavior is so
complex that there are no established governing equations, especially for the constitutive equation. Then,
some studies used the Finite Element Method, and others developed a point-based method. In addition, the
viscoelastic fluid has a unique characteristic called “Spinnability”. The fluid is stretched so long like a string
and shrinks very fast when it is ruptured. Therefore, we have been performing viscoelastic fluid simulations
based on Cauchy’s equation of motion by devising the stress term in the constitutive equation. In this paper,
we report a viscoelastic fluid simulation based on the combination of viscous and elastic stresses.
1 INTRODUCTION
Computer graphics can visualize almost all of the
things from artificial objects to natural phenomena.
However, the visualization has no meaning without
precise simulations. One of the most difficult and
challenging issues is to simulate and visualize liquid
behavior precisely, because the liquid shape changes
dynamically and its boundary is very clear. In the
liquid simulations, Newtonian fluid is comparatively
simple since the relation between the shearing stress
and the velocity gradient is linear.
However, there are many non-Newtonian fluids
in the world, and one of them is called “viscoelas-
tic fluid” that has two characteristics of viscosity and
elasticity, and the relation between the shearing stress
and the velocity gradient is not linear. The behav-
ior is so complex that there are no established gov-
erning equations, especially for the constitutive equa-
tion. There are some studies that use FEM (Finite
Element Method) or SM (Spring Mass) model, and
others employ several kinds of methods such as a
point-based method. In addition, the viscoelastic fluid
has a unique characteristic called “spinnability”. The
fluid can be stretched so long as if it is a string, and
then it shrinks very fast when it is ruptured. There is
no previous work that can represent the behavior of
spinnability.
Then, we have been trying to simulate and visu-
alize the behavior of spinnability based on Cauchy’s
equation of motion. In the equation, there is a term
of “deviatoric stress”, which should be composed of
viscous and elastic stresses, because the viscoelastic
fluid has two characteristics of viscosity and elastic-
ity. In our previous works, we treated the deviatoric
stress as a linear combination of viscous and elastic
stresses, where the sum of the coefficients for viscos-
ity and elasticity equals to 1.0.
On the other hand, the behavior of the viscoelastic
fluid suddenly changes at the rupture point when
it begins to be ruptured. Therefore, in this paper,
we decide the coefficients of the linear combination
of viscous and elastic stresses experimentally, and
show the comparison of the simulation results for
several kinds of parameters with real viscoelastic
fluid behavior.
172
Mukai, N., Morooka, R., Natsume, T. and Chang, Y.
Viscoelastic Fluid Simulation based on the Combination of Viscous and Elastic Stresses.
DOI: 10.5220/0010615901720178
In Proceedings of the 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2021), pages 172-178
ISBN: 978-989-758-528-9
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 RELATED WORKS
Related to Newtonian fluid works, there is a survey
that shows two types of studies: hydrodynamic theory
based research and experimental based works (Mould
and Yang, 1997), and also there is another investi-
gation published during the 1980s and 1990s (Igle-
sias, 2004). In addition, there is a survey on com-
puter graphics based ocean simulations and the ren-
dering (Darles et al., 2011), which shows two types
of methods: physics based methods using Navier-
Stokes equation and empirical law based oceano-
graphic methods.
Some people employed a mesh modeling to rep-
resent ocean waves (Hinsinger et al., 2002), irregular
long crest waves (Cui et al., 2004), and vast ocean
scene (Dupuy and Bruneton, 2012), because ocean
waves have continuous smooth surfaces. The draw-
back of the mesh modeling is re-meshing that takes
a lot of time and is necessary when the topology
changes. Then, others utilized a particle method. SPH
(Smoothed Particle Hydrodynamics) is one of the par-
ticle methods, and they presented water pouring into
a glass (M
¨
uller et al., 2003) and river flowing (Kipfer
and Westermann, 2006).
As for the fluid behavior simulations, there are
two kinds of methods: Eulerian (grid based) and La-
grangian (particle based) methods. There are some
studies that utilized Eulerian method to propose an
optimized grid for GPU (Graphics Processing Unit)
(Chentanez and M
¨
uller, 2010a) and to represent freez-
ing ice with air bubbles (Nishino et al., 2012). On
the other hand, there are other studies that employed
semi-Lagrangian method to represent viscous liq-
uids interacting with 3D objects (Foster and Fedkiw,
2001) and to represent bubbles with Voronoi diagram
(Busaryev et al., 2012).
Moreover, other people used a hybrid method of
Eulerian and Lagrangian to represent bubbles in wa-
ter (Hong et al., 2008) and spray or splash (Chentanez
and M
¨
uller, 2010b). There is also a method to animate
viscous fluid with collision between particles and ob-
stacles (Miller, 1989), and a parallel particle render-
ing system that allows to treat particles with different
shapes, sizes, colors and transparencies (Sims, 1990).
In addition, some studies proposed particle level-set
algorithms to visualize many kinds of bubble shapes
(Greenwood and House, 2004) and fine splash parti-
cles (Geiger et al., 2006). There are also some works
that employed a level set method to present bubbles in
liquid and gas interaction (Kim et al., 2007), and that
also used a particle level set method for dense liquid
volume and utilized a particle method for the diffused
regions (Losasso et al., 2008).
For the simulations of the viscoelastic fluid, some
people used a spring-mass system to visualize an egg
dropping on the floor (Tamura et al., 2005), and others
employed Finite Element methods to represent large
plastic deformation of solid materials and to simulate
the complex elastic and plastic behavior of viscoelas-
tic materials (Bargtei et al., 2007) (Wojtan and Turk,
2008). These utilized Eulerian method.
On the other hand, there is a study that employed
a particle based method for a viscoelastic fluid sim-
ulation (Clavet et al., 2005); however, the method
also added springs to accomplish elastic and non-
linear plastic effects. The other research proposed a
new method called “Material Point Method” to sim-
ulate foams and sponges, and employed Oldroyd-B
model to preserve the plastic volume (Ram et al.,
2015). There is also another method that developed a
constrained dynamics solver by extending a position
based dynamics method to represent whipped cream
and strawberry syrup (Barreiro et al., 2017). These
methods are particle methods or hybrid methods, and
these studies do not obey Navier-Stokes equation as
the governing equation, although some works employ
the conservation of mass and momentum.
In addition, there is a research that used a grid
based method with level set to animate viscoelastic
fluids such as mucus, liquid soap, and so on (Goktekin
et al., 2004). On the other hand, there is another work
that utilized SPH based method to visualize melting
and flowing of the viscoelastic fluid (Chang et al.,
2009). Although these studies used different meth-
ods, they both employed Navier-Stokes equation as
the governing equation, because the viscoleastic fluid
has the characteristics of liquid and Navier-Stokes
equation is the established governing equation to an-
alyze fluid behavior. In addition, they added viscosity
and elasticity terms to Navier-Stokes equation as the
external term.
Navier-stokes equation is the established govern-
ing equation of fluid, and the viscoelastic fluid has
two characteristics of viscosity and elasticity. Viscos-
ity is a feature of fluid, while elasticity is another fea-
ture of elastic body that is a kind of continuum. Then,
the governing equation of the viscoelastic fluid should
be Cauchy’s equation of motion, which is the funda-
mental equation of Navier-Stokes equation including
“deviatoric stress” that has both viscous and elastic
stresses.
Therefore, we have been trying to simulate the be-
havior of the viscoelastic fluid by introducing a linear
combination of viscosity and elasticity for deviatoric
stress term of Cauchy’s equation of motion, and to
evaluate the stretched length of the viscoelastic fluid
to visualize spinnability (Mukai et al., 2010) (Mukai
Viscoelastic Fluid Simulation based on the Combination of Viscous and Elastic Stresses
173

et al., 2018) (Mukai et al., 2019). In the previous
work, the sum of the coefficients of the linear com-
bination of viscosity and elasticity was 1.0, since the
deviatoric stress is composed of viscous and elastic
stresses.
However, the behavior of the viscoelastic fluid
changes dynamically between before and after the
rupture. When the fluid is ruptured after being
stretched, it shrinks very fast. In the behavior of the
viscoelastic fluid, the effect of viscosity is larger than
that of elasticity all the time; however the effect of
elasticity becomes a little bit larger after it is ruptured
because the fluid shrinks very fast and the character-
istics of elasticity appear. Then, in this simulation,
the coefficients of the linear combination of viscos-
ity and elasticity are decided experimentally, and we
show the simulation results with the different coeffi-
cients and the comparison of them with real viscoelas-
tic fluid behavior.
3 METHOD
We employ MPS (Moving Particle Semi-implicit)
method for the simulation, which is one of parti-
cle methods and was developed by Koshizuka and
Oka for incompressible fluid analysis (Koshizuka and
Oka, 1996). In this research, the governing equations
are the equation of continuity (Eq.(1)) and Cauchy’s
equation of motion (Eq.(2)), which are described in
the following.
Equation of continuity:
dρ
dt
= 0 (1)
Cauchy’s equation of motion with surface tension:
ρ
dv
v
v
dt
= ∇ · σ
σ
σ + g
g
g + f
f
f = (−∇pI
I
I + ∇· τ
τ
τ) + g
g
g + f
f
f (2)
where, ρ is the density, t is time, v
v
v is the velocity, σ
σ
σ
is the stress tensor, g
g
g is the gravity, f
f
f is the external
force, p is the pressure, I
I
I is the unit matrix, and τ
τ
τ is
the deviatoric stress.
The target is the viscoelastic fluid that has two
characteristics of viscosity and elasticity. Then,
τ
τ
τ should have two characteristics of viscosity and
elasticity and can be written as follows (Eqs.(3)-(8)).
τ
τ
τ = ατ
τ
τ
v
+ βτ
τ
τ
e
(3)
τ
τ
τ
v
= 2η
0
D
D
D (4)
D
D
D =
1
2
(L
L
L + L
L
L
t
), L
L
L = ∇V
V
V (5)
V
V
V = (u
u
u,v
v
v,w
w
w) (6)
∇V
V
V =
∂u
u
u
∂x
∂u
u
u
∂y
∂u
u
u
∂z
∂v
v
v
∂x
∂v
v
v
∂y
∂v
v
v
∂z
∂w
w
w
∂x
∂w
w
w
∂y
∂w
w
w
∂z
(7)
τ
τ
τ
e
= 2µε
ε
ε, µ =
E
2(1 + ν)
(8)
where, τ
τ
τ
v
and τ
τ
τ
e
are viscous and elastic terms of de-
viatoric stress, respectively, and α and β are the linear
combination coefficients. η
0
is zero shear viscosity,
V
V
V is the particle velocity, ε
ε
ε is the distortion tensor, E
is Young’s modulus and ν is Poisson’s ratio.
In our previous study (Mukai et al., 2019),
α + β = 1 because viscoelastic stress is composed of
viscous and elastic stresses. However, the behavior
of viscosity and elasticity is different, and the effect
of viscosity is dominant all the time, while the ef-
fect of elasticity becomes a little bit larger after the
fluid is ruptured since it shrinks very fast like a rub-
ber, which shows the characteristics of elasticity and
is called “spinnability”. Then, in this research, we de-
cide the parameters of α and β experimentally. The
value of α is larger than that of β all the time, because
the effect of viscosity is dominant. On the other hand,
the value of β depends on the density of the narrowest
part of the fluid, because the fluid shrinks very fast at
the middle part of it. Then, β can be calculated with
the following equation (Eq.(9)).
β =
1 −
n
k
n
0
C (9)
where, n
0
is the initial particle number density, n
k
is
the particle number density of the narrowest part at
the time k, and C is the dominant coefficient for elas-
ticity, which is decided experimentally.
4 HIGH PRECISION
CALCULATION
The original MPS method developed by Koshizuka
and Oka (Koshizuka and Oka, 1996) assumes that the
particles are regularly arranged. Then, the calculation
becomes unstable when the particle arrangement is
imbalanced. In this study, we adopt some high order
MPS methods to stabilize the calculation even when
the particle arrangement is imbalanced. One of the
stabilization is for the Poisson equation of pressure
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
174
calculation. We use the model with the velocity di-
vergence term, which was proposed by Tanaka and
Masunag (Tanaka and Masunaga, 2010).
The original Laplacian of pressure developed by
Kishizuka and Oka (Koshizuka and Oka, 1996) was
as folllows (Eq.(10)).
< ∇
2
P >
k+1
i
=
ρ
∆t
2
n
0
− n
k
i
n
0
(10)
where, < ∇
2
P >
k+1
i
is the Laplacian of the pressure
for a particle i at the time step k + 1, ∆t is the time
step, n
k
i
is the particle number density of a particle i
at the time step k. On the other hand, the Laplacian
of pressure is calculated as follows (Eq.(11)) by the
method proposed by Tanaka and Masunaga (Tanaka
and Masunaga, 2010).
< ∇
2
P >
k+1
i
=
ρ
∆t
∇ · u
u
u
∗
i
+ γ
ρ
∆t
2
n
0
− n
k
i
n
0
(11)
where, u
u
u
∗
i
is the provisional velocity vector of the par-
ticle i, and γ is the relaxation coefficient, which is set
depending on the problem. In this simulation, it is
set as 0.2 according to the pre-calculation result. For
an ideal incompressible fluid, ∇ · u
u
u equals to 0; how-
ever, in computer simulations, it does not equal to 0.
Then, Eq.(11) considers the term for the precise pres-
sure calculation.
The other stabilization is for the calculation of the
pressure gradient. For this purpose, we employ a high
order gradient model developed by Iribe and Nakaza
(Iribe and Nakaza, 2011). Moreover, in order to pre-
vent the excessive approach of particles, the model
developed by Monaghan (Monaghan, 2000) is used,
which considers the artificial repulsive force that is
added to the gradient model developed by Iribe and
Nakaza (Iribe and Nakaza, 2011). The original gradi-
ent of the pressure developed by Koshizuka and Oka
(Koshizuka and Oka, 1996) was as follows (Eq.(12)).
< ∇P >
i
=
d
n
0
∑
j6=i
P
j
−
ˆ
P
i
|r
r
r
j
− r
r
r
i
|
2
(r
r
r
j
− r
r
r
i
)ω(|r
r
r
j
− r
r
r
i
|) (12)
On the other hand, the high order pressure gradi-
ent is calculated with the method developed by Mon-
aghan (Monaghan, 2000) in the following (Eq.(13)).
< ∇P >
i
=
"
1
n
0
∑
j6=i
(r
r
r
j
− r
r
r
i
)
|r
r
r
j
− r
r
r
i
|
⊗
(r
r
r
j
− r
r
r
i
)
|r
r
r
j
− r
r
r
i
|
ω(|r
r
r
j
− r
r
r
i
|)
#
−1
"
1
n
0
∑
j6=i
P
j
−
ˆ
P
i
|r
r
r
j
− r
r
r
i
|
2
(r
r
r
j
− r
r
r
i
)ω(|r
r
r
j
− r
r
r
i
|)
#
(13)
where, ⊗ is the tensor product, and
ˆ
P
i
is the mini-
mum pressure in the radius of influence so that
ˆ
P
i
is
always lower than P
j
. Since P
j
−
ˆ
P
i
is always posi-
tive, the repulsive force is generated between particles
i and j Then, it is possible to prevent the excessive ap-
proach of particles due to the attraction. Eq.(13) en-
ables the calculation stable by replacing d in Eq.(12)
with the inverse matrix in Eq.(13). By the calculation
with Eq.(13), the pressure becomes stable even when
particles are not regularly arranged, and the inverse
matrix becomes a unit matrix when particles are reg-
ularly arranged. In this case, Eq.(13) is equivalent to
Eq.(12).
5 SIMULATION
Table 1 and 2 show the specifications of the PC and
the parameters used for the simulation, respectively.
Table 1: Specification of the PC used in the simulation.
OS Windows 10 Education 64 bit
CPU Intel Core i5-8400 2.8GHz
Main memory 8GB
GPU GeForce GTX 1660 SUPER with 6GB
memory
Table 2: Parameters used for the simulation.
Parameter Value Unit
Density ρ 1.16 × 10
−3
g/mm
3
Young’s modulus E 1.05 × 10
3
Pa
Poisson’s ratio ν 0.5
Zero shear viscosity η
0
28 Pa · s
Initial distance
of particles
(= Particle radius)
l
0
0.3 mm
Pulling velocity v
v
v 18 mm/s
Time step 4t 0.10 × 10
−3
s
Fig.1 shows the initial state of the particles, and
(a) shows the side view for all particles. In the side
view, the upper squared part of the particles is a solid
body that is pulled up with the pulling velocity. On
the other hand, the lower larger squared part of the
particles is a rigid body that does not move even if
other part of the particles moves. The middle cubed
part of the particles is the viscoelastic fluid that is
pulled according to the upper squared part of the
particles. On the other hand, Fig.1 (b) shows the
top view for only the viscoelastic fluid, which has
four side named S1, S2, S3 and S4, which side has
three particle width. In this research, we assume
that the viscoelastic fluid begins to be ruptured if the
particles enter in the radius of influence of the particle
Viscoelastic Fluid Simulation based on the Combination of Viscous and Elastic Stresses
175
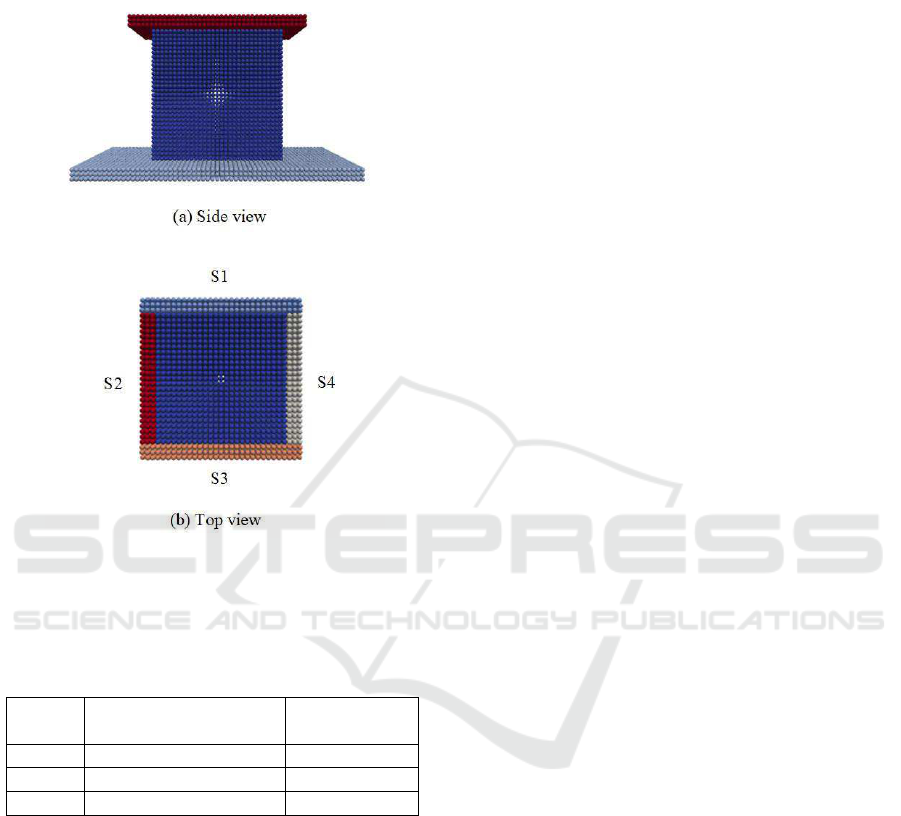
in the confrontation. For example, if the particle
in S1 enters in the radius of influence of the par-
ticle in S3, the viscoelastic fluid begins to be ruptured.
Figure 1: Initial state of particles.
Table 3 shows the specification of the particles
shown in Fig.1.
Table 3: Particle specification.
Part Size [mm]
(Width×Depth×Hight)
# of particles
Upper 12.3×12.3×0.9 5,043
Middle 9.3× 9.3×9.3 29,791
Lower 18.9×18.9×0.9 11,907
6 RESULTS
In the simulation, we used 0.97 and 0.95 as α for be-
fore and after the rupture of the stretched viscoelastic
fluid, respectively. The value of α is large because we
have found experimentally that the effect of viscosity
is larger than that of elasticity all the time. In addition,
if α is larger than 0.97, viscoelastic fluid behaves as if
it is Newtonian fluid, and it flows down on the floor.
It does not show the characteristic of elasticity if α is
larger than 0.97. In addition, the effect of elasticity
becomes a little bit larger after the rupture, because
the characteristics of elasticity appear and the fluid
shrinks very fast like a rubber. This means that the
characteristics of viscosity become a little bit lower
compared with that in the before. Then, the value of
α after the rupture is lower than that before the rup-
ture.
On the other hand, β is decided with Eq.(9), and
the maximum value is C when the particle number
density n
k
is 0, which means that stretched viscoelas-
tic fluid is completely ruptured. Then, we set 0.03,
0.05 and 0.07 as C. One reason is that 0.03+0.97=1,
which means that 0.03 is the complement of 0.97 that
is the value of α before the rupture. The second rea-
son is that 0.05+0.95=1, which means that 0.05 is the
complement of 0.95 that is the value of α after the rup-
ture. Setting 0.07 as C is the confirmation that the ef-
fect of viscosity is too strong for the viscoelastic fluid
to be stretched, because 0.07+0.95=1.02>1.0.
Fig.2 shows the three kinds of simulation images
after 750 steps and a real viscoelastic fluid named
“guar gum”.
In Fig.2 (a), (b), and (c), the middle part width be-
comes thinner as C becomes larger, because larger C
means the less effectiveness of viscosity and the more
effectiveness of elasticity. All the stretched lengths of
three images are shorter than a real viscoelastic fluid
shown in Fig.2 (d). Spinnability, which is a unique
characteristic of viscoelastic fluid, has three features:
1) it can be stretched very long, 2) the middle part
of it becomes very thin, and 3) it shrinks very fast
when it is ruptured. In the simulation results, it seems
that the feature 2) is satisfied; however, the feature
1) is not satisfied. All three stretched lengths are
shorter than the real viscoelastic fluid shown in (d).
In fact, the stretched length in the simulation using
C = 0.05 was 1.4[mm], while the real viscoelastic
fluid stretched length was 41.8[mm] that was mea-
sured in the movie. In the feature 3), the shrinking
time in the simulation using C = 0.05 was 500[ms],
while it was 4, 333[ms] in the real viscoelastic fluid,
which means that the viscoelastic fluid in the simu-
lation shrunk faster than the real fluid, although it is
partly due to the shorter stretching than that of the real
fluid. As a result, the effect of viscosity should be
stronger than that of elasticity to realize spinnability
in the viscoelastic fluid simulation. However, the too
large value of α makes the viscoelastic fluid behave
as if it is Newtonian fluid.
7 CONCLUSIONS
In this paper, we have adopted two high order cal-
culations of pressure to simulate the behavior of the
viscoelastic fluid precisely. One is for Laplacian of
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
176

Figure 2: Simulation results and a real viscoelastic fluid.
pressure that is used in the Poisson equation, and the
other is for the gradient of pressure, which prevents
the excessive approach of particles. In the simula-
tion of the viscoelastic fluid behavior, we have em-
ployed the idea of the combination for viscous and
elastic stresses of deviatoric stress; however, the coef-
ficients of the combination were decided experimen-
tally keeping the sum of coefficients equals to almost
1.0.
As the result of the simulation, one of the features
in spinnability was satisfied, and the middle part of
the fluid became very thin. However, the stretched
length in the simulation was shorter than that in the
real fluid, and the shrinking time in the simulation
was also shorter. One of the reasons is the shortage
of the particles used in the simulation to realize the
precise behavior of viscoelastic fluid. Although the
simulation results differed from the behavior of the
reawhich arel viscoelastic fluid “guar gum”, we have
confirmed that the combination of viscous and elastic
stresses can be one solution for the analysis of vis-
coelastic stress. In this paper, the linear combination
coefficients of α and β, and the elastic dominant co-
efficient of C were decided experimentally; however,
these coefficients shoud be decided theoretically with
some evidence.
In the future, we have to reconsider the combina-
tion way of viscous and elastic stresses in deviatoric
stress term to realize the two remaining characteristics
of spinnability, and we also have to use more particles
to simulate viscoelastic fluid behavior precisely.
REFERENCES
Bargtei, A., Wojtan, C., Hodgins, J., and Turk, G. (2007). A
finite element method for animating large viscoplastic
flow. ACM Transactions on Graphics, 26(3):Article
No.16.
Barreiro, H., Garc
´
ıa-Ferm
´
andez, I., Aldu
´
an, I., and Otaduy,
M. (2017). Conformation constraints for efficient
viscoelastic fluid simulation. ACM Transactions on
Graphics, 36(6):Article No.221.
Busaryev, O., Dy, T., Wang, H., and Ren, Z. (2012). An-
imating bubble interactions in a liquid foam. ACM
Transactions on Graphics, 31(4):63:1–63:8.
Chang, Y., Bao, K., Liu, Y., Zhu, J., and Wu, E. (2009).
A particle-based method for viscoelastic fluids anima-
tion. In ACM Symposiumon virtual reality software
and technology, pages 463–468.
Chentanez, N. and M
¨
uller, M. (2010a). Real-time simu-
lation of large bodies of water with small scale de-
tails. In ACM SIGGRAPH/Eurographics symposium
on computer animation, pages 197–206.
Chentanez, N. and M
¨
uller, M. (2010b). Real-time simula-
tion of large bodies of water with small scale details.
Clavet, S., Beaudoin, P., and Poulin, P. (2005). Particle-
based viscoelastic fluid simulation. In ACM SIG-
GRAPH/Eurographics Symposium on computer ani-
mation, pages 219–228.
Cui, X., Yi-cheng, J., and Xiu-wen, L. (2004). Real-
time ocean wave in multi-channel marine simulator.
In ACM SIGGRAPH international conference on vir-
tual reality continuum and its application in industry,
pages 332–335.
Darles, E., Crespin, B., Ghazanfarpour, D., and Gonzato,
J. (2011). A survey of ocean simulation and rendering
Viscoelastic Fluid Simulation based on the Combination of Viscous and Elastic Stresses
177

techniques in computer graphics. In Computer Graph-
ics Forum, volume 30, pages 43–60.
Dupuy, J. and Bruneton, E. (2012). Real-time animation and
rendering of ocean whitecaps. In SIGGRAPH Asia,
Technical Briefs, page Article No.15.
Foster, N. and Fedkiw, R. (2001). Practical animation of
liquids. In ACM SIGGRAPH, pages 23–30.
Geiger, W., Leo, M., Rasmussen, N., Losasso, F., and Fed-
kiw, R. (2006). So real it’ll make you wet. In ACM
SIGGRAPH Sketches, page Article No.20.
Goktekin, T., Bargteil, A., and O’Brien, J. (2004). A
method for animating viscoelastic fluids. ACM Trans-
actions on Graphics, 23(3):463–468.
Greenwood, S. and House, D. (2004). Better with bubbles:
Enhancing the visual realism of simulated fluid. In
ACM SIGGRAPH/Eurographics symposium on com-
puter animation, pages 287–296.
Hinsinger, D., Neyret, F., and Cani, M. (2002). Inter-
active animation of ocean waves. In ACM SIG-
GRAPH/Eurographics symposium on computer ani-
mation, pages 116–166.
Hong, J., Lee, H., Yoon, J., and Kim, C. (2008). Bubbles
alive. ACM Transactions on Graphics, 27(3):48:1–
48:8.
Iglesias, A. (2004). Computer graphics for water modeling
and rendering: A survey. Future Generation Com-
puter Systems, 20(8):1355–1374.
Iribe, T. and Nakaza, E. (2011). An improvement of accu-
racy of the mps method with a new gradient calcula-
tion model (in japanese). Journal of the Japan Society
of Civil Engineers(B2), 67(1):36–48.
Kim, B., Liu, Y., Llamas, I., Jiao, X., and Rossignac, J.
(2007). Simulation of bubbles in foam with the vol-
ume control method. ACM Transactions on Graphics,
26(3):98:1–98:10.
Kipfer, P. and Westermann, R. (2006). Realistic and interac-
tive simulation of rivers. In Graphics Interface, pages
41–48.
Koshizuka, S. and Oka, Y. (1996). Moving-particle semi-
implicit method for fragmentation of incompressible
fluid. Nuclear Science and Engineering, 123:421–
434.
Losasso, F., Talton, J., Kwatra, N., and Fedkiw, R. (2008).
Two-way coupled sph and particle level set fluid simu-
lation. IEEE Transsactions on Visualization and Com-
puter Graphics, 14(4):797–804.
Miller, G. (1989). Globular dynamics: A connected parti-
cle system for animating viscous fluids. Computers &
Graphics, 13(3):305–309.
Monaghan, J. (2000). SPH without a tensile instability.
Journal of Computational Physics, 159(2):290–311.
Mould, D. and Yang, Y. (1997). Modeling water for com-
puter graphics. Computers & Graphics, 21(6):801–
814.
M
¨
uller, M., Charypsr, D., and Gross, M. (2003). Particle-
based fluid simulation for interactive applications. In
ACM SIGGRAPH/Eurographics symposium on com-
puter animation, pages 154–159.
Mukai, N., Ito, K., Nakagawa, M., and Kosugi, M. (2010).
Spinnability simulation of viscoelastic fluid. In ACM
SIGGRAPH Posters, page Article No.18.
Mukai, N., Matsui, E., and Chang, Y. (2019). Investigation
on viscoelastic fluid behavior by modifying deviatoric
stress tensor. In SIMULTECH, pages 216–222.
Mukai, N., Nishikawa, T., and Chang, Y. (2018). Evaluation
of stretched thread lengths in spinnability. In ACM
SIGGRAPH Posters, page Article No.62.
Nishino, T., Iwasaki, K., Dobashi, Y., and Nishita, T.
(2012). Visual simulation of freezing ice with air bub-
bles. In SIGGRAPH Asia, Technical Briefs, page Ar-
ticle No.1.
Ram, D., Gast, T., Jiang, C., Schroeder, C., Sromakhin, A.,
Teran, J., and Kavehpour, P. (2015). A material point
method for viscoelastic fluids, foams and sponges. In
ACM SIGGRAPH/Eurographics symposium on com-
puter animation, pages 157–163.
Sims, K. (1990). Particle animation and rendering using
data parallel computation. In ACM SIGGRAPH, vol-
ume 24, pages 405–413.
Tamura, N., Tsumura, N., Nakaguchi, T., and Miyak, Y.
(2005). Spring-bead animation of viscoelastic ma-
terials. In ACM SIGGRAPH Sketches, page Article
No.64.
Tanaka, M. and Masunaga, T. (2010). Stabilization and
smoothing of pressure in mps method by quasi-
compressibility. Journal of Computational Physics,
229(11):4279–4290.
Wojtan, C. and Turk, G. (2008). Fast viscoelastic behavior
with thin features. ACM Transactions on Graphics,
27(3):Article No.47.
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
178
