
Development of a Simulation Environment for Automated Model
Configuration for the Design and Validation of AI-based Driving
Functions
Or Aviv Yarom
a
and Xiaobo Liu-Henke
Ostfalia University of Applied Sciences, Salzdahulmer Str. 46/48, 38302 Wolfenbuettel, Germany
Keywords: Autonomous Driving, Artificial Neural Networks, Matlab, Simulink, Deep Learning Toolbox.
Abstract: The further development of autonomous driving requires the increased use of innovative and intelligent
algorithms. In order to develop these effectively and efficiently, suitable development methods and tools are
required. Therefore, this paper presents the development of a simulation environment for automated model
configuration for the design and validation of AI-based driving functions. Based on the current state of the
art, the conception including requirement definition and realization of the simulation environment are
described in detail. In addition, the simulation environment is validated in an application for automated vehicle
guidance with Artificial Neural Networks.
1 INTRODUCTION
The innovation alliance autoMoVe (Dynamically
Configurable Vehicle Concepts for Use-Specific
Autonomous Driving), funded by the European
Regional Development Fund (ERDF), aims to
develop an autonomous, modular and electric vehicle
concept. By exchanging application specific modules
during runtime, a wide range of applications from
internal freight transport to passenger conveyance in
road traffic shall be realized autonomously. Within
the scope of this research project, the Ostfalia
subproject autoEVM (Holistic Electronic Vehicle
Management for Autonomous Electric Vehicles)
focuses on the model-based development of
innovative intelligent algorithms and functions for
autonomous driving.
Higher automation of driving operations is
accompanied by an increase in the requirements to be
met by the vehicle or the automated driving functions.
Current functions and algorithms based on methods
of control theory or classical information processing
can no longer fully meet these (Milz and Schrepfer,
2020). Therefore, artificial intelligence (AI)
represents a key technology in this project or for
many domains involved in the development and use
a
https://orcid.org/0000-0001-5627-4199
of intelligent, automated vehicles (Fayjie et. al.,
2018).
Regardless of the type of information processing,
modern vehicles and driving functions are complex
mechatronic systems with a high degree of internal
and external interconnection. In order to handle this
complexity in the development and validation
process, a design methodology that is well established
in mechatronics research is used. This consistent and
verification oriented methodology is based on digital
models and simulations to make the design and
validation process of complex mechatronic systems
in a crosslinked environment easier, faster and safer.
(Liu-Henke et. al., 2016)
The development and simulation environments
currently available for intelligent vehicle functions
are very extensive in general, but they concentrate
largely on conventional algorithms for information
processing. The use of AI functions in development
and validation is either not possible or only possible
with a great amount of effort. Conversely, current
development environments for AI algorithms do not
offer the advantages or the functional scope of tools
that are specifically designed for automated driving
functions. (Stančin and Jović, 2019)
This current incompatibility of the two worlds for
automated driving functions and AI is therefore now
Yarom, O. and Liu-Henke, X.
Development of a Simulation Environment for Automated Model Configuration for the Design and Validation of AI-based Driving Functions.
DOI: 10.5220/0010611901630171
In Proceedings of the 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2021), pages 163-171
ISBN: 978-989-758-528-9
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
163

inhibiting the research and development progress of
automated and autonomous driving. Consequently, in
order to realize the mobility transformation
envisioned in the projects and society, new methods
and tools are needed that can unite both worlds.
Therefore, this paper presents the development of a
simulation environment for automated model
configuration for the design and validation of AI-
based driving functions. On the one hand, this
simulation environment's scope of functions is geared
towards the development of automated driving
functions and, on the other hand, it offers the
possibility to use not only conventional but also AI
algorithms.
2 METHODOLOGY
The complexity of modern vehicles is constantly
increasing due to the higher degree of internal and
external networking and the growing number of
intelligent and efficient hardware and software
components. In order to handle the system
complexity and to avoid errors at an early stage in the
design of the information processing, a holistic design
methodology is indispensable. Therefore, the
continuous, verification-oriented, model-based
design methodology based on Rapid Control
Prototyping (RCP) and Model-in-the-Loop (MiL),
Software-in-the-Loop (SiL) and Hardware-in-the-
Loop (HiL) simulations has been established. (Liu-
Henke et. al., 2016)
The methodology is based on function-oriented
physical models of a controlled system. The control
function is then simulated depending on the system
behavior and validated in MiL simulations at an early
stage. To avoid manual programming, the model and
control function are developed in block diagram-
based programming languages. The subsequent
automatically generated function code is again tested
against the control system model in SiL simulations.
HiL simulations are used for further validation and
optimization of the information processing with real-
time capable simulation models and real
subcomponents of the system to be controlled.
The verification oriented and iterative approach
of this methodology also supports the development
process in the challenging task of validation. The
methodology addresses the weaknesses of classical
validation based on physical prototypes, such as a
high expenditure of resources or safety risks for
humans, machines and the environment. Due to their
virtual character, MiL, SiL and HiL simulations save
time and costs (Yarom et. al., 2020a). They enable
feasible and reproducible tests at any time without
direct dependence on physical prototypes, times of
day or human experts. Thus, simulation cycles, for
different functional variants or scenarios, can be
automated. This makes this methodology particularly
suitable for training AI algorithms. This is because,
with rare exceptions, machine learning is always
iterative.
Virtual design methods like these form the basis
for many intelligent systems, such as highly
automated vehicles. With prototype-based testing, the
hundreds of thousands of test kilometers required
would not be achievable in a reasonable amount of
time and at a reasonable cost. (Yarom et. al., 2020a)
3 STATE OF THE ART
3.1 Intelligent Driving Functions
In automated driving, individual driving tasks are
taken over from the human driver by so called
advanced driver assistance systems (ADAS). Such
ADAS, e.g. for speed control or lane keeping
assistance, have been available in series production
for some time (Kukkala et. al., 2018). ADAS process
the data collected by vehicle and environment sensors
and thus calculate driving commands, which are then
implemented by means of controlled actuators. With
an increasing number and interconnection of ADAS,
the human driver successively delegates driving tasks
to the vehicle until he finally becomes a passenger in
autonomous driving. Then we no longer speak of
ADAS, but of (automated) driving functions.
Increasing automation of the driving process
means an extreme increase in the requirements for the
driving functions. Not only more but also different
sensors are needed for environment perception,
whose inhomogeneous raw data must be processed
and implemented repeatedly, intensively and with the
highest real-time requirements. If information from
internal bus or external vehicle-to-everything (V2X)
communication is added, the complexity increases
even further. This pushes conventional algorithms for
control and data processing to their limits. (Milz and
Schrepfer, 2020) For this reason, AI algorithms are
already being used today for automated driving
functions. Artificial neural networks (ANNs) in
combination with machine learning (ML) are
particularly promising. Prominent applications are
image-based semantic segmentation of the driving
environment (Lyu et. al., 2019) or automated vehicle
guidance (Huang et. al., 2019). AI algorithms are
promising for the further development of autonomous
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
164

vehicles due to their performance, robustness and
adaptability (Kuutti et. al., 2021). There is also
potential for intelligent vehicle functions outside of
automated vehicle guidance, e.g., for battery
management (Alaoui, 2019). On the other hand,
conventional approaches are often still used at lower
levels of information processing, e.g. local control of
actuators (Milz and Schrepfer, 2020).
3.2 Fundamentals of Artificial Neural
Networks and Machine Learning
The term AI covers a variety of different methods and
algorithms that deal with the autonomous and
automated solving of problems (Togelius et. al.,
2018). ANNs and ML form a subfield of AI that has
been shown to be suitable in numerous problems in a
wide variety of domains, including autonomous
driving. Therefore, this paper focuses on this subfield.
The numerous positive properties of ANNs and ML,
such as adaptability, error resistance, versatility, and
above all learning ability, can be traced back to their
similarity to the structure and functioning of the
human brain.
Analogous to biology, (artificial) neurons are
processing units that accumulate input stimuli via
weighted connections and compute an output using an
activation function. The interconnection of several
neurons in at least two layers makes up the ANN.
Combinations of up to several hundreds of neurons in
up to more than one hundred layers are common. Not
only arbitrary forward but also time-feedback
connections are possible in the ANN. (Skansi, 2018)
The optimal architecture of an ANN cannot be
determined analytically so far (Tirumala, 2020).
Therefore, experience and test series are necessary to
find a suitable architecture in the trade-off between
computational effort and performance. The number,
interconnection and weighting of connections
characterizes the "intelligence" of an ANN. Generally
speaking, more neurons and connections mean a
higher performance of the ANN, while at the same
time the computational effort increases.
Just like a human brain, the ANN must first learn
or train a task. These terms refer to the adaptation of
the connection weights. In the environment of
autonomous driving, supervised learning (SL) and
reinforcement learning (RL) are relevant for this. In
SL, the ANN is provided with input data and the
corresponding output. The ANN iteratively learns the
relationship between the two variables (Duriez,
Brunton and Noack, 2017). This learning procedure
is particularly suitable for image based object
recognition, for example (Lyu et. al., 2019). In RL,
the ANN successively learns the optimal strategy
from the experience of past sequences in terms of a
given reward function (Duriez, Brunton and Noack,
2017). This procedure is used when no training data
is available, e.g., in automated vehicle guidance
(Huang et. al., 2019). SL and RL are head categories
of learning procedures, with diverse concrete training
algorithms. Just like the ANN architecture, the
optimal training algorithms or their parameters
cannot be determined analytically. Thus, experience
and experimentation are required here as well.
3.3 Development Environments for
Intelligent Driving Functions
For the model-based design of automated driving
functions, several development and simulation
environments exist, such as MATLAB/Simulink with
toolboxes, dSPACE Automotive Simulation Models
(ASM), and IPG CarMaker, to name just a few. They
all differ in terms of their primary focus or their
specific advantages and disadvantages. All of them
offer extensive model libraries for traffic, vehicle
dynamics, component, sensor or even driver models.
They are specifically designed for the configuration
and reproducible simulation of a wide range of
driving scenarios and vehicle variabilities for the
purpose of vehicle development or validation. The
tools usually have integrated model configurators,
visualization, experiment environments, and in some
cases scenario and test managements. The tools listed
are suitable for the design methodology described in
section 2 using the RCP process. They enable not
only MiL simulations, but also real-time SiL and HiL
simulations through automatic code generation in
conjunction with MATLAB/Simulink. (Deter et. al.,
2021) However, the tools do not offer the possibility
to integrate ANNs into the respective simulation and
configuration tools without further effort, let alone to
train them.
The only exception here is MATLAB's Deep
Learning Toolbox (DLT). With this toolbox, any
ANN architecture can be configured and trained with
a large number of pre-implemented algorithms. The
DLT is basically compatible with Simulink and
automatic code generation. However, ANN
configuration is quite complicated and is usually done
manually for individual ANNs. As a result, it is not
very suitable in its native form for carrying out test
series with varying architectures, training parameters
or even different driving functions.
There are also specific development
environments for ANN training. Most of them are
based on the Python programming language.
Development of a Simulation Environment for Automated Model Configuration for the Design and Validation of AI-based Driving Functions
165

Prominent tools are, among others, TensorFlow,
PyTorch, Keras and Caffe. They all have comfortable
and extensive functionalities regarding the creation
and training of ANNs. However, there is only the
possibility of scripted programming. A clearer block
diagram-based programming suitable for the RCP
process is not available. (Stančin and Jović, 2019)
Therefore, it is difficult to design simulations with the
same accuracy, computation time and comfort with
the ANN-specific tools as with the tools for
automated driving functions. The effort for this is so
large that even computer games like Grand Theft
Auto (Wang et. al., 2019) or TORCS (Zhang and Cho,
2017) have been coupled for vehicle and traffic
simulations in combination with the mentioned ANN
tools. However, these approaches rather served the
investigation of ANNs and ML and do not meet the
requirements of accuracy, real-time capability,
reproducibility and variation possibility of a real
driving function development.
4 CONCEPTION OF THE
SIMULATION ENVIRONMENT
4.1 Deriving the Problem Statement
The findings from section 3 can be used to derive a
problem statement for pursuing the project goals
(section 2). The design of intelligent automated
driving functions requires the use of AI algorithms.
However, as described, these cannot easily be used in
the usual development environments. ANNs and ML
methods quickly become very complex and
confusing. A manual programming of different ANN
architectures with the associated calculation rules
would not only be error-prone but would also take a
lot of time. The same applies to the ML procedures,
which would have to be parameterized and adapted
for each ANN architecture. The fact that architecture
design, training and test processes are always
empirical and iterative requires many simulation
cycles and further worsens the situation.
The use of ANN-specific development
environments is also ruled out. If the automated
driving functions are to be designed under realistic
conditions, the depth of modeling must be sufficiently
precise. In the classical way of analytical physical
modeling, the mathematical equations and their
numerical solution methods would have to be
programmed independently in a script language. If
one now considers the number of subsystems of a
vehicle, further driving functions or other road users
that are to be simulated, a highly complex simulation
system results. In addition, there are different
variants, configurations, scenarios and, if necessary,
real-time requirements. Although the implementation
of such a project would be possible in principle, it
would be very error-prone and not very effective.
Finally, there are already resource-optimal simulation
environments for this purpose.
In summary, none of the currently available
simulation environments is suitable for the design and
validation of AI-based driving functions according to
the development methodology from section 2. The
conclusion is therefore that a separate simulation
environment must be developed for this design
methodology.
4.2 Definition of Requirements
To address the aforementioned challenges, the
requirements for the new simulation environment for
automated model configuration for the design and
validation of AI-based driving functions are defined
below:
R1 Usable for various driving functions
R2 Operation with Simulink and compatibility
with corresponding blocks and models
R3 Use of various existing or creation of own
models and functions with any modeling depth
R4 Easy creation and calculation of ANNs
R5 Automatic integration of ANNs into the
Simulink models
R6 Variation of model configuration
R7 Automatic model configuration
R8 Automated execution of simulation series
R9 Training by means of different ML methods
R10 Use for generation of training data for ML
R11 Visualization in 2D and 3D
R12 Operation with user interface or scripts
R13 High-performance computing times for large
simulation series and later real-time
applications
R14 Compatibility with dSPACE ASM for later
development of the simulation environment
R15 Possibility of automatic code generation
4.3 Concept Formation
The first step to fulfill the previously defined
requirements, is the realization of the simulation
environment in MATLAB and Simulink (R2). This
ensures compatibility with standard blocks and
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
166
existing models available in Simulink (R3).
Furthermore, any other models and automated driving
functions can be created (R1). In principle, toolboxes
can also be used for this purpose. It is only important
to ensure that these support automatic code
generation (R15). In this case, compatibility with
dSPACE ASM is also guaranteed (R14).
For the configuration and creation of ANNs, the
DLT is used. For this purpose, an additional ANN
generator is designed, which creates arbitrary ANNs
architectures automatically by simple user input via a
graphical user interface (GUI) or a script (R4) and
generates them directly into the simulation model
(R5). By using the DLT, several ML algorithms are
automatically available (R9). Several algorithms are
already usable for SL, given that one has generated
training data (R10). RL algorithms are available in the
RL toolbox of MATLAB. Alternatively, it is possible
to implement custom training algorithms for both SL
and RL, since the DTL provides convenient access to
the connection weights.
With a scenario generator, different simulation
scenarios can be configured with respect to the route
and the road participants (R6). This configuration is
then automatically transferred to the simulation
model. In order to better interpret the events in the
scenario during and after the simulation, an additional
rudimentary visualization is implemented. The 2D
and 3D visualization is based on the Bird's-Eye Scope
and the plot function of MATLAB (R11).
The configuration and creation of the scenario is
also done by a GUI or a script (R12). With the
possibility of script-based scenario and ANN
generation, simulation sequences can be automated
(R8). The corresponding model parameters are
automatically configured and updated (R7). Just as
with the developed driving functions and models, a
lean and computationally optimized programming
must also be taken into account for the realization of
the scenario and ANN generator as well as the
automation mechanisms (R13).
5 REALIZATION OF THE
SIMULATION ENVIRONMENT
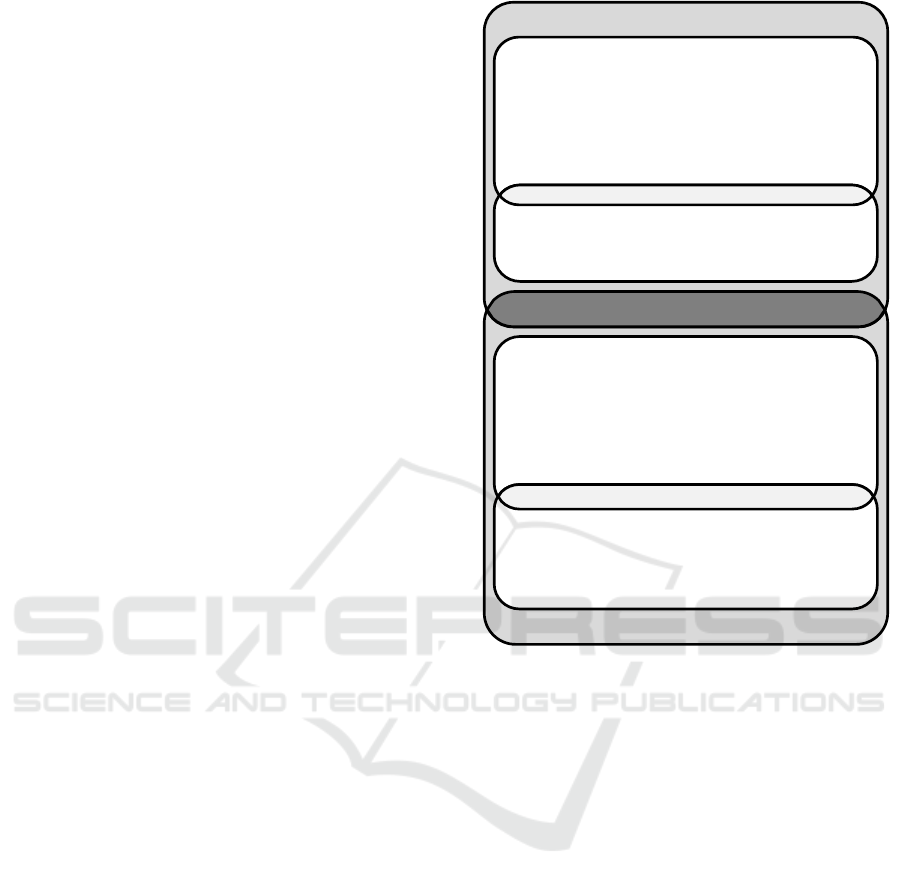
Figure 1 shows the setup and structure of the
simulation environment. It mainly consists of the
simulation model itself and the control of the
simulation environment. In the simulation model, the
modeling and the calculation of the simulation take
place. It contains the models, parameters and
functions of the entire ego vehicle in the desired
Figure 1: Setup and structure of the simulation environment
for automated model configuration for the design and
validation of AI-based driving functions.
modeling depth as well as the environment simulation
defined in the scenario. The ego vehicle is the "own"
vehicle for which the automated driving functions are
developed. The ego vehicle is usually modeled in a
very detailed way (in contrast to the other third-party
vehicles) and contains several components in the
desired modeling depth, depending on the
application. These include, for example, the driving
functions to be developed (AI-based or otherwise),
sensors, vehicle dynamics, communication or
component models. These individual model
components of the ego vehicle communicate with
each other as well as with scenario model components
via defined interfaces. The scenario model includes
the various components of the driving environment,
such as route models with infrastructure, third-party
vehicles, other traffic participants including their
behavior or information from V2X communication.
Before any simulation can take place, the
simulations must first be configured. Thus, the
control of the simulation environment is divided into
the configuration of the simulation cycles on the one
Control of the Simulation einvironment
Control and Monitoring of the Simulation
• Data Recording and Visualization
• Automated Simulation Execution
• Automatic Model Update
• ML Cycle Execution
• Termination Conditions
Configuration of the Simulation Cycles
• Scenario Generator
• ANN Generator
• ML Configuration
Execution Control
Simulation Model
Ego Vehicle
• Driving Function
• Sensor Models
• Vehicle Dynamics Models
• Component Models
• Communication
Scenario/Environment
• Road Model
• Participants
Joint Simulation
Workspace
Development of a Simulation Environment for Automated Model Configuration for the Design and Validation of AI-based Driving Functions
167
hand, and the simulation control and monitoring on
the other hand. The configuration of the simulation
cycles is basically the input interface of the user. With
the scenario generator it is possible to select how
exactly each simulation should look and run
according to the function specification. For example,
the route, the type, number and movement of other
road users, etc. can be set. Of course, the composition
and modeling depth of the ego vehicle must also be
defined.
As mentioned, this simulation environment can
be used to design not only AI-based functions, but
also functions based on conventional methods.
However, since this paper focuses on the use of ANN,
the connection of the simulation to their training will
now be described. After the general setting of the
simulations has been determined, it is important to
first configure the ANN architectures to be used. The
ANN generator allows a convenient configuration of
these ANNs in order to insert them into the simulation
as a model component (driving function). The
training of the ANNs is always iterative and requires
the execution of several simulations in the whole
scenario in which the ANN is used with the respective
architecture and the associated weights. The goal of
the training or the simulations is the successive
improvement of the ANN performance with respect
to the development requirements. The simulations run
according to a specific scheme depending on the
training algorithm and training parameters. The
configuration of the training in the ML Configuration
allows the simulations (also ML cycles) to be
automatically adapted and executed according to this
scheme. In summary, the information from the user
input is used as execution control for the “Control and
Monitoring of the Simulation” (Figure 1).
Thus, an internal flowchart is generated to
automate the simulation cycles. In it, for example,
several ML cycles are started first in one scenario and
then in another. Before each cycle, the corresponding
parameters of the active configuration are loaded and
transferred to the simulation model via the MATLAB
workspace. In this way, the model is automatically
updated. The workspace serves as an interface
between the simulation control and the simulation
model. It enables the recording and storage of
simulation data for visualization and later evaluation.
Furthermore, it transmits selected variables for model
monitoring. In case of previously defined,
inadmissible conditions, the simulation is
automatically aborted.
6 SIMULATION AND
EVALUATION
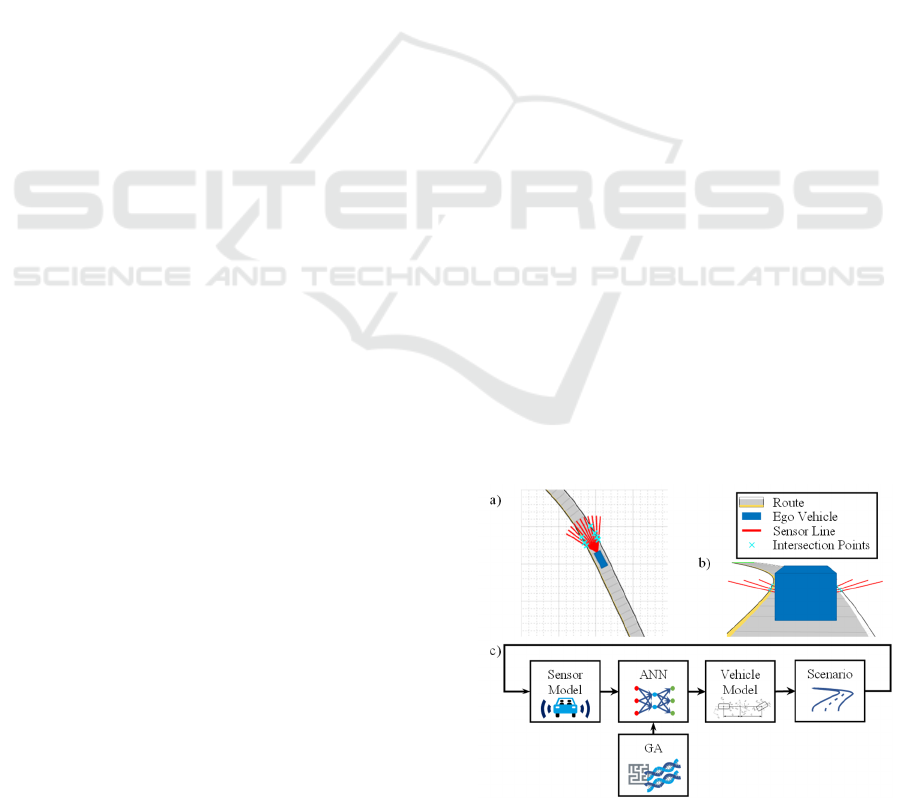
6.1 Description of the Use Case and
Modeling
To demonstrate this, a driving function for automated
lateral guidance at constant speeds on arbitrary, one-
lane routes without other road users is to be designed
in this use case. The example is consciously chosen
in a compressed way to show the simulation and time
effort. This is to illustrate the benefit of the automated
model configuration.
Since the ego vehicle’s speed is constant in this
application, a linear single-track model is used to
represent the vehicle dynamics. Automatically
generated routes according to the guidelines of the
German Federal Highway Research Institute with a
constant width of 3.5 m form the environment. The
sensor model consists of eleven lines, which detect
the distance to the lane boundaries in an angular range
of ±40 ° and a radius of 8 m. Figure 2 a) and b)
illustrate the use case with the visualization function
of the simulation environment. Other vehicle
components and communication systems of the ego
vehicle are not considered. The automated lateral
guidance is executed by an ANN in the simulation.
The eleven sensor values are the inputs, a
corresponding steering angle is the output.
The ANN is supposed to learn a natural steering
behavior with a self-implemented RL method, so
called Genetic Algorithms (GA). Natural steering
behavior in this case means constantly keeping the
center of the road and avoiding strong or high-
frequency oscillations to ensure safe and comfortable
driving behavior. GAs are a group of algorithms that
imitate the natural process of evolution in order
to successively approach an optimal solution. A so
Figure 2: Overview of the use case and modeling.
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
168
called population, which consists of several solution
candidates (individuals), evolves generation by
generation by selection, recombination and mutation.
A population size of 50 means here that 50 different
ANNs are simulated in one generation. The iterative
character of the GA tends to result in relatively many
simulations.
Figure 2 c) shows an overview of the basic
structure of the simulation model. In a simulation, the
ego vehicle is placed on the track or scenario. There,
in one simulation step, the sensor model implicitly
captures the position and orientation of the ego
vehicle on the track via the eleven sensor lines. The
eleven sensor signals are passed to the ANN which
calculates a steering angle. This is used in the vehicle
dynamics model to calculate a new vehicle position
on the track. This process is repeated until the ego
vehicle reaches the destination or exceeds one of the
road markings. The GA is actually located outside the
simulation model. The associated reward function
accesses simulation data to evaluate the behavior of
individuals. The GA uses this information to update
the connection weights of the ANN. For this purpose,
several simulation runs are performed according to a
certain scheme of the ML cycle (Section 6.2).
6.2 Configuration of the Simulation
Cycles
As described in section 3, the determination of the
ANN architecture and the parameters of the ML
algorithm is always empirical. Furthermore, it is
important to pay attention to the generalization
capability when training ANNs. In this case, this
means that the ANN must be able to perform the
automated lateral guidance even on unknown routes.
To consider this aspect directly during the training,
several test runs are performed directly after every
single training. Thus, it is necessary to configure
several different simulations.
In order to successively achieve an ideally
designed driving function, multi-step tests must be
implemented in the configuration of the simulation
cycles. The simulation cycle always consists of
several ML cycles. One ML cycle always includes a
training of one ANN architecture with one GA
parameter set on one route with one reward function,
followed by four test runs on additional routes. While
the training phase of the GA consists of many
separate simulations for the individuals and
generations, only the best individual from the training
is tested in each of the test runs. Thus, the number of
simulations 𝑆
to be performed per ML cycle 𝑖 is a
function of the population size 𝑃
, the number of
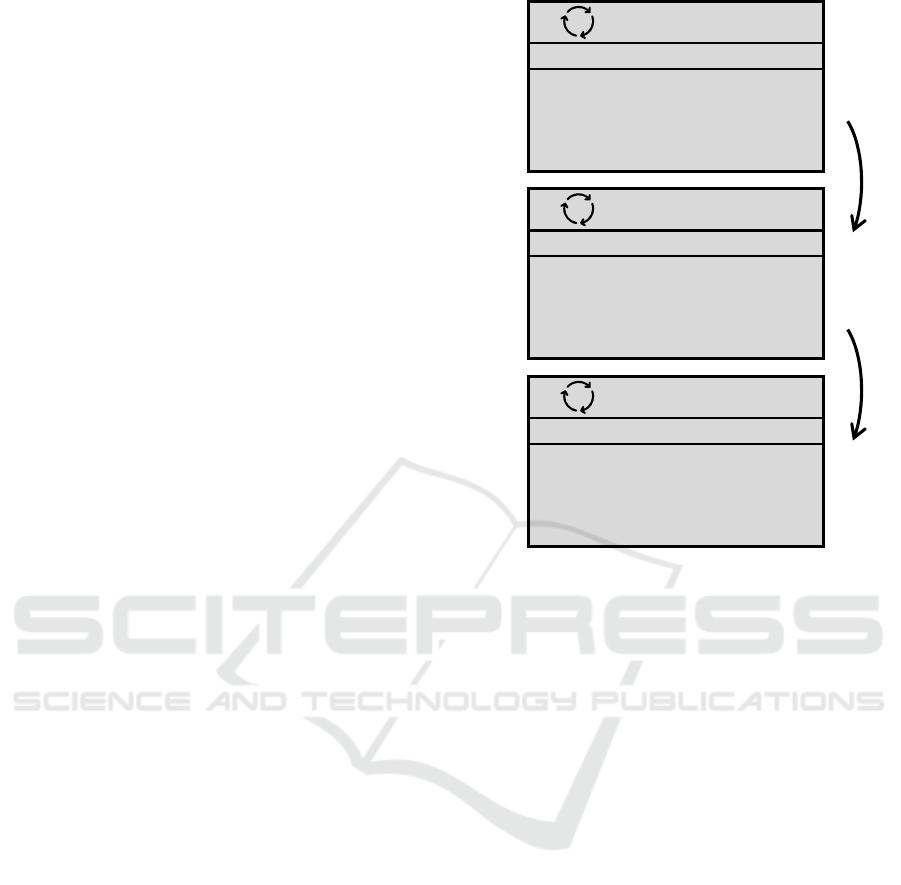
Figure 3: Sequence of the automatic simulation execution.
generations 𝐺
and number of test runs 𝑇
. The
number of simulations in the total cycle 𝑁
is the sum
of all 𝑆
for the different ML cycles or configurations
𝐾
:
𝑁
=𝑆
∈
=𝑃
∙𝐺
+𝑇
∈
(1)
Assuming a population size of 50 and a
generation number of 25, 1254 simulations are
consequently performed in one ML cycle.
The first configuration involves the investigation
of six variants of the GA parameter sets for training a
base ANN (Figure 3 a)). The base ANN is a non-
optimized ANN that is assumed to be able to perform
the function fundamentally. The same is true for the
basic reward function. The resulting optimal GA
parameter set is used to determine the best of twelve
preconfigured ANN architectures, as shown in Figure
3 (b). In the final step (Figure 3 c)), the actual
optimization of the ANN behavior is performed by
performing further ML cycles with nine different
reward functions. According to equation (1), the total
number of simulations 𝑁
performed is in the high
six-digit range. Without the automatic model
configuration of the automated simulation
environment, the required effort would have
exceeded a reasonable level.
a) ML Cycles
Parameters Variants
ANN-Architecture* 1
Route 1…5
Reward Function 1
GA-Parameters 1…6
6
b) ML Cycles
Parameters Variants
ANN-Architecture* 1…12
Route 1…5
Reward Function 1
GA-Parameters best (a)
12
c) ML Cycles
Parameters Variants
ANN-Architecture* best (b)
Route 1…5
Reward Function 1…9
GA-Parameters best (a)
9
*Parameter to be Optimized
Development of a Simulation Environment for Automated Model Configuration for the Design and Validation of AI-based Driving Functions
169
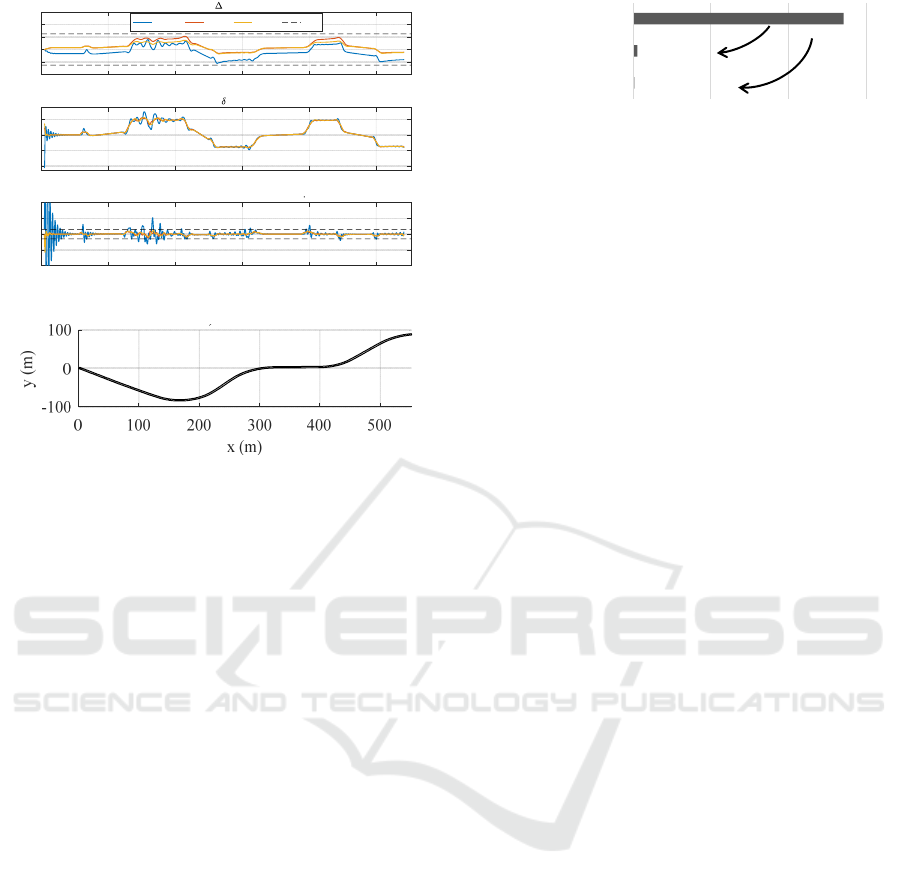
Figure 4: Simulation results of the use case on a test track.
6.3 Simulation Results and Evaluation
After the automatic execution of all configurations
from Figure 3, a function for automated lateral
guidance has been created. The ANN can safely and
comfortably take over lateral guidance on any route
in a speed range from 30 to 70 km/h. Corresponding
simulation results are shown in Figure 4. There, the
lateral deviation from the middle of the lane Δ𝑦
(Figure 4 a)), the steering angle 𝛿 (Figure 4 b)) and
the steering angle velocity 𝛿
(Figure 4 c)) are shown
for different fitness functions over the x-coordinate of
a test track (Figure 4 d)). The figure thus illustrates a
subsection of the ML cycle from Figure 3 c) for
optimizing the behavior with the reward function.
The best driving behavior in terms of comfort and
safety was achieved with the 𝐹𝑖𝑡
%
function
(yellow) due to the lowest lateral deviation and
oscillations. In this fitness function, the ego-vehicle
or ANN was rewarded for moving forward on the
track as well as for reaching the destination. It was
penalized for deviations from the middle of the lane
as well as for large steering angle changes. For more
detailed descriptions of the design and validation of
the driving function from this use case, please refer to
the previous work (Yarom et. al., 2020a) and (Yarom,
Jacobitz and Liu-Henke, 2020b).
The focus of this paper is on the simulation
environment. For its evaluation, a single automated
ML cycle was hand-programmed in MATLAB and
compared with the simulation environment in terms
of runtime. In the hand-programmed version, all
Figure 5: Comparison of simulation times in the use case.
model components according to Figure 2 c) as well as
the visualization were implemented. The comparison
according to Figure 5 showed that a single ML cycle
in the hand-programmed environment takes about 22
h and 36 min. In the simulation environment for the
automated model configuration, on the other hand, an
ML cycle with identical configuration takes about 28
min, which is only about 2% of this time.
Furthermore, it is possible to switch off the
visualization in the simulation environment. In this
way, the time required for each ML cycle can be
further reduced to a quarter.
The simulation environment presented in this
paper now makes it possible, on the one hand, to
design automated vehicle functions based on ANN.
On the other hand, all further requirements from
section 4.2, e.g. optimized computing time,
compatibility, usability and automation, have been
implemented. Thus, it exactly fulfills the originally
intended purpose of uniting the worlds of "modeling
and design of automated vehicles" and "AI
development" or their respective advantages. Thus, a
tool has been created with which the development and
validation of automated vehicles can be developed
safely and efficiently according to the methodology
presented in section 2. The result is a significant
contribution to the progress of the project and
autonomous driving.
7 CONCLUSION AND OUTLOOK
In this paper, a simulation environment for automated
model configuration for the design and validation of
AI-based driving functions was presented. Starting
with an introduction and motivation, the design
methodology and the state of the art were presented.
From this, the necessity for the development of the
presented simulation environment was derived and
requirements for it were defined. The implementation
of the requirements was described in the concept and
the realization. The result is a simulation environment
based on MATLAB and Simulink, which has a high
degree of compatibility with existing development
environments. In addition, it can automatically
0 100 200 300 400 500
-0.4
-0.2
0
0.2
0.4
a) y in m
Fit
100%
Fit
50%
Fit
80%
max
0 100 200 300 400 500
-4
-2
0
2
b) in °
0 100 200 300 400 500
x-coordinate of the test track in m
-400
-200
0
200
400
c) steering angle speed (steering wheel) in ° s
-1
d) Test track
0 500 1000 1500
Simulation Environment
(No Visualisation)
Simulation Environment
Hand-Programmed
Simulation Time in min
≈ 22 h 36 min
≈ 28 min
≈ 7 min
≈ 2 %
≈ 0,5 %
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
170

execute and visualize large simulation series in a
short time after a user-friendly configuration. This
makes it ideally suited for use in the design
methodology presented. Finally, the simulation
environment was used in an example application,
demonstrating its benefits and functionality.
Individual results of the application as well as their
relevance for the simulation environment were
presented and critically discussed. Future work steps
include extending the model and function library and
integrating it with dSPACE ASM.
ACKNOWLEDGEMENTS
This publication resulted from the subproject
"autoEMV" (Holistic Electronic Vehicle
Management for Autonomous Electric Vehicles) in
the context of the research project "autoMoVe"
(Dynamically Configurable Vehicle Concepts for a
Use-specific Autonomous Driving) funded by the
European Fund for Regional Development (EFRE |
ZW 6-85030889) and managed by the project
management agency Nbank.
REFERENCES
Alaoui, C. (2019). Hybrid Vehicle Energy Management
Using Deep Learning. 2019 International Conference
on Intelligent Systems and Advanced Computing
Sciences (ISACS), Taza, Morocco.
Deter, D., Wang, C., Cook, A., Perry N. K. (2021).
Simulating the Autonomous Future: A Look at Virtual
Vehicle Environments and How to Validate Simulation
Using Public Data Sets. In IEEE Signal Processing
Magazine, vol. 38, no. 1.
Duriez, T., Brunton, S., Noack, B. R. (2017). Machine
Learning Control. Springer International Publishing,
Cham, Switzerland.
Fayjie, A. R., Hossain, S., Oualid D., Lee, D. (2018).
Driverless Car: Autonomous Driving Using Deep
Reinforcement Learning in Urban Environment. 2018
15th International Conference on Ubiquitous Robots
(UR), Honolulu, Hawaii.
Huang, Z., Xu, X., He, H., Tan, J., Sun, Z. (2019).
Parameterized batch reinforcement learning for
longitudinal control of autonomous land vehicles. In
IEEE Trans. Syst., Man, Cybern, Syst., vol. 49, no. 4.
Kukkala, V. K., Tunnell, J., Pasricha, S., Bradley, T.
(2018). Advanced Driver-Assistance Systems: A Path
Toward Autonomous Vehicles. In IEEE Consumer
Electronics Magazine. vol. 7, no. 5.
Kuutti, S., Bowden, R., Jin, Y., Barber, P., Fallah, S.
(2021). A Survey of Deep Learning Applications to
Autonomous Vehicle Control, In IEEE Transactions on
Intelligent Transportation Systems, vol. 22, no. 2.
Milz, S., Schrepfer, J. (2020). Is artificial intelligence the
solution to all our problems? Exploring the applications
of AI for automated driving. In Bertram T. (eds)
Automatisiertes Fahren 2019. Springer Vieweg,
Wiesbaden, Germany.
Liu-Henke, X., Scherler, S., Fritsch, M., Quantmeyer, F.
(2016). Holistic development of a full active electric
vehicle by means of a model-based systems
engineering. 2016 IEEE International Symposium on
Systems Engineering (ISSE), Edinburgh, UK.
Lyu, H., Fu, H., Hu, X., Liu, L. (2019). Edge-Based
Segmentation Network for Real-Time Semantic
Segmentation in Traffic Scenes. 2019 IEEE
International Conference on Image Processing (ICIP),
Taipei, Taiwan.
Skansi, S. (2018). Introduction to Deep Learning.
Undergraduate Topics in Computer Science. Springer,
Cham, Switzerland.
Stančin I., Jović A. (2019). An overview and comparison of
free Python libraries for data mining and big data
analysis. 2019 42nd International Convention on
Information and Communication Technology,
Electronics and Microelectronics (MIPRO), Opatija,
Croatia.
Tirumala, S.S. (2020). Evolving deep neural networks
using co-evolutionary algorithms with multi-population
strategy. In Neural Comput & Applic, vol. 32.
Togelius, J., Juul, J., Long, G., Uricchio, W., Consalvo, M.
(2018) What Is (Artificial) Intelligence?. In Playing
Smart: On Games, Intelligence, and Artificial
Intelligence. MIT Press.
Wang, D., Devin, C., Cai, Q. -Z., Yu, F., Darrell, T. (2019).
Deep object centric policies for autonomous driving.
2019 International Conference on Robotics and
Automation (ICRA), Montreal, Canada.
Yarom, O. A., Scherler, S., Goellner, M., Liu-Henke, X.
(2020a). Artificial Neural Networks and Reinforcement
Learning for model-based design of an automated
vehicle guidance system. 12th International
Conference on Agents and Artificial Intelligence
(ICAART), Valletta, Malta.
Yarom O. A., Jacobitz S., Liu-Henke X. (2020b). Design of
Genetic Algorithms for the Simulation-Based Training
of Artificial Neural Networks in the Context of
Automated Vehicle Guidance. 2020 19th International
Conference on Mechatronics - Mechatronika (ME).
Prague, Czech Republic.
Zhang, J., Cho, K. (2017). Query-efficient imitation
learning for end-to-end autonomous driving.
Proceedings of the Thirty-First AAAI Conference on
Artificial Intelligence (AAAI-17), San Francisco, USA.
Development of a Simulation Environment for Automated Model Configuration for the Design and Validation of AI-based Driving Functions
171
