
Goal and Threat Modelling for Driving Automotive Cybersecurity Risk
Analysis Conforming to ISO/SAE 21434
Christophe Ponsard, Valery Ramon and Jean-Christophe Deprez
CETIC Research Centre, Charleroi, Belgium
Keywords:
Automotive, Safety, Security, Certification, Standards, Goal-oriented Analysis.
Abstract:
As cars are increasingly connected and autonomous, they also become more exposed to cyber security threats.
Providing strong protection and reactive response to such threats in a large industry involving many tiers
and complex safety critical systems is challenging and required the development of the new ISO 21434 stan-
dard. Along with ISO 2626 dedicated to safety, it provides solid grounds for safety-security co-engineering.
This paper focuses on how to provide effective and efficient support to the risk assessment phase based on a
model-based approach. A rich goal-oriented meta-model is proposed to capture automotive assets and system
properties, to estimate the impact of damage scenarios, to identify threats and to assess their feasibility. The
approach is implemented as proof-of-concept through the meta-model adaptation of a generic co-engineering
platform and is illustrated on the car light control sub-system.
1 INTRODUCTION
Cars have become totally connected objects and re-
quire communication to support a wide range of sce-
narios from information and entertainment purposes
to new ways of operating the car itself such as driver-
assistance, connected fleet and autonomous driving
modes. This fast pace functional evolution has signif-
icantly increased the attack surface of the connected
car (Shiho Kim, 2020).
Unfortunately, cyber security methods to protect
the car assets did not improve at the same pace and re-
lied, for a time, only on the J3061 set of best practices
with little guidance on how to proceed (SAE, 2016).
To fill this gap, ISO and SAE joined their effort to
produce the ISO/SAE 21434 standard which will su-
persede J3061 by providing more guidance through
actionable steps, a list of requirements for compli-
ance, management processes and a global specifica-
tion (ISO, 2020). This standard is still in draft form
and due to be published in 2021.
The forthcoming ISO 21434 standard also com-
plements the ISO 26262 by covering the cybersecu-
rity perspective while ISO 26262 is addressing the
functional safety perspective (ISO, 2011). The safety
and security domains differ by the considered im-
pacts: safety risks are related to consequences to peo-
ple or environment, while cyber security risks are pri-
mary concerned with financial, operational, and pri-
vacy impacts. However, both share a common culture.
From a risk management viewpoint, security risks are
analysed through Threat Analysis and Risk Assess-
ment (TARA) while safety performs Hazard Analysis
and Risk Assessment (HARA). This opens the way
to building a wider safety-security co-engineering ap-
proach, based on the fact safety has been part of the
automotive development culture for decades. Given
this evolution, it is anticipated that automotive suppli-
ers will be asked to demonstrate compliance with ISO
21434 which can also lead to competitive advantage
(Sembera, 2020).
Relying on model-based engineering is a realis-
tic approach as most of the steps in the automo-
tive development process are already model-based
(Leopold, 2019). For example, SysML (OMG, 2005)
and UML (OMG, 1997) are widely used as part of
the architecture process or for model-based software
development and integrated in automotive toolchains
(Hause and Korff, 2007). Supporting model-based
risk assessment is highly beneficial in order to support
the systematic identification of assets, vulnerabilities,
threats and countermeasures.
Our paper takes such a model-based approach for
risk assessment. In order to consider both safety and
security dimensions, we rely on a goal-oriented re-
quirements engineering (GORE) framework able to
structure systems properties and related risks (van
Lamsweerde, 2009). Our contributions are to show
Ponsard, C., Ramon, V. and Deprez, J.
Goal and Threat Modelling for Driving Automotive Cybersecurity Risk Analysis Conforming to ISO/SAE 21434.
DOI: 10.5220/0010603008330838
In Proceedings of the 18th International Conference on Security and Cryptography (SECRYPT 2021), pages 833-838
ISBN: 978-989-758-524-1
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
833

that such an approach supports:
• the identification of key assets, safety and security
properties and related risks.
• co-engineering practices through commonly
adopted methods to integrate TARA with HARA.
• a model-based tool chain with analysis, transfor-
mation and document generation.
• a validation on an automotive subsystem for con-
trolling lights. capabilities.
This paper is structured as follows. Section 2 gives
more background on the ISO 26262 and ISO 21434
standards. Section 3 presents our approach based on
the modelling of assets, goals and hazards/threats and
introduces our case study. Section 4 presents our
HARA performed on a tool supported application of
our method to an automotive case. Finally, Section 5
draws some conclusions and identifies further work.
2 BACKGROUND ON
AUTOMOTIVE STANDARDS
This section gives minimal background about the con-
tent of the ISO 26262 standard and the new ISO/SAE
21434 standard.
2.1 ISO 26262 for Automotive Safety
The ISO 26262 “Road vehicles – Functional safety”
is the international standard for functional safety of
electrical and/or electronic systems in production au-
tomobiles (ISO, 2011). It is a risk-oriented standard,
in the spirit of ISO 31000 (ISO, 2018). It is a spe-
cialisation of the IEC 61508, a risks basic functional
safety standard which applies to all industries. The
standard addresses the risk of hazardous operational
situations using qualitatively HARA approaches re-
sulting in the definition of safety measures to avoid
or mitigate the effect of failures either of systemic or
random nature.
From a process perspective, it follows the automo-
tive W-shaped lifecycle combining two V cycles re-
spectively for hardware and software design. HARA
is performed during the concept phase and results
in the identification of potential hazards. The corre-
sponding risks are investigated with a rating function
of the driving situation, the ability to control it and
the severity of the caused harm. It is evaluated using
an automotive safety integrity level (ASIL), which is
assigned to each safety goal ranging from A to D for
the most critical level. For systems with lower risks,
quality management activities are deemed enough
(Schmittner and Ma, 2015).
About cyber security, this standard defines the
baseline cyber security guidelines for the develop-
ment phase. It does not have specific requirements
for post-production, decommissioning phases, auto-
motive cyber security, or dealing with specific cyber
security incidents.
2.2 ISO 21434 for Automotive Cyber
Security
This upcoming standard, due to be released in 2021,
aims at driving an industry-wide consensus related to
key cyber security issues in the automotive domain
(ISO, 2020). It will supersede the J3061 (SAE, 2016)
good practices with more structured recommenda-
tions showing that the industry is fully embracing the
challenges of ensuring automotive cyber security. Its
scope is road vehicles (e.g. car, trucks, busses) and
covers their sub-systems, components, connections,
and software. Its purpose is to ensure that manufactur-
ers and all participants in the supply chain have struc-
tured processes in place that support a “security by
design” process.
For a process perspective, similarly to ISO 26262,
it looks at the entire development process and life cy-
cle of a vehicle. It follows the V-model and consid-
ers a wide range of activities such as TARA in the
design branch, verification and validation in the test-
ing branch and security monitoring, incident and re-
sponse management in the operation phase.
The standard is structured in 10 sections and 15
clauses. It starts by defining (1) the scope, (2) the
normative reference, (3) the glossary, (4) general con-
siderations and (5/clauses 5-6-7) the management ap-
proach. Then (6/clause 8) focuses on risk assessment.
It is followed by three sections respectively covering
(7/clause 9) concept phase, (8/clauses 10-11) product
development and (9/clauses 12-13-14) product, oper-
ation and maintenance. The final section (10/clause
15) deals with supporting processes.
Concerning the risk assessment, the standard does
not impose any TARA methods but its clause 8 re-
minds about the mandatory steps it should cover, in
the same spirit as the ISO 27005. It is depicted in
Figure 1.
Figure 1: ISO 21434 TARA Process.
SECRYPT 2021 - 18th International Conference on Security and Cryptography
834
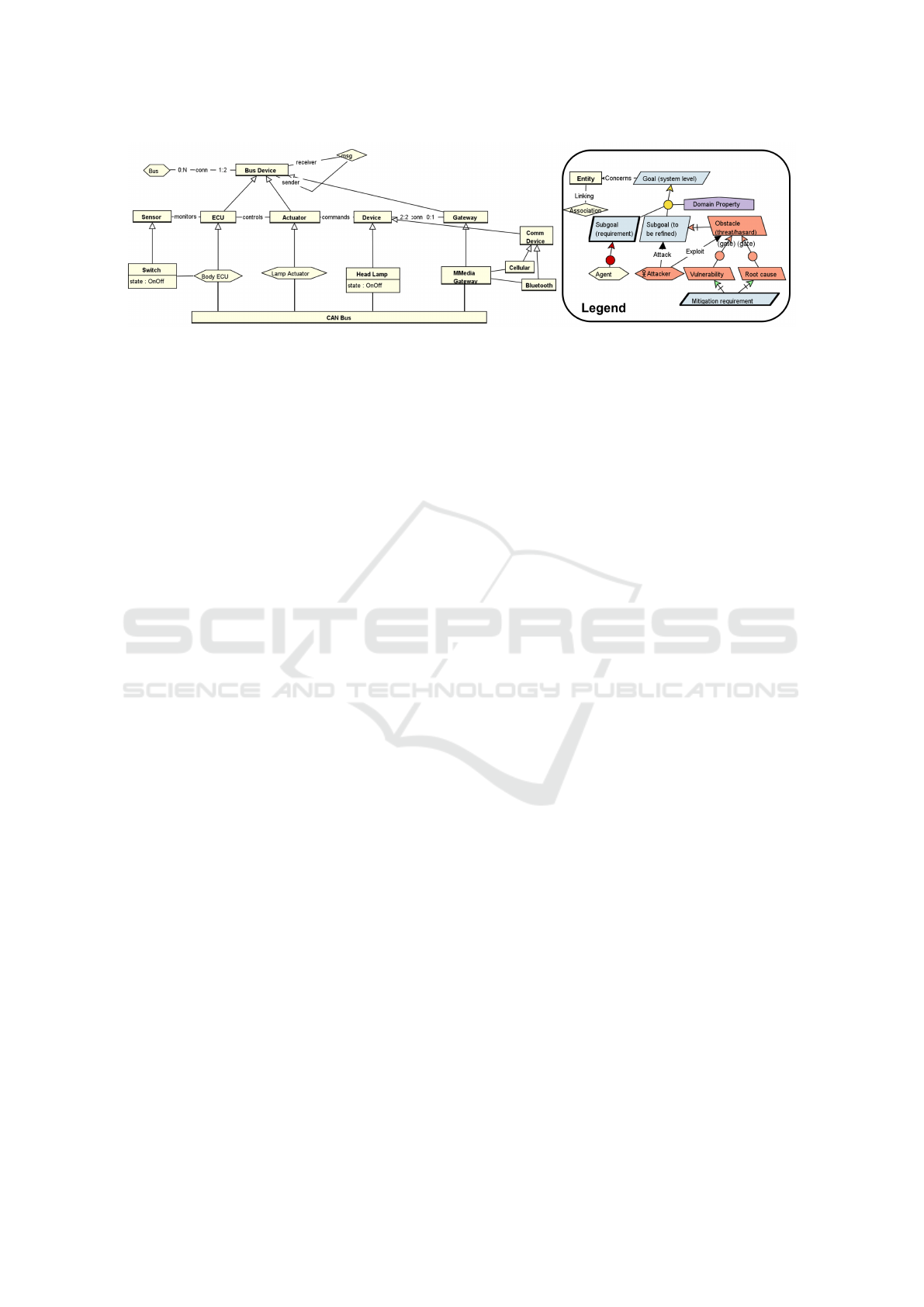
Figure 2: Object model of the light subsystem (with legend of notations).
3 GOAL-ORIENTED MODELS
FOR CO-ENGINEERING
This section introduces our methodological frame-
work based on GORE. Different variants of goal mod-
elling were elaborated in the requirements engineer-
ing field such as i* (Yu and Mylopoulos, 1997),
KAOS (van Lamsweerde, 2009), GSN (ACWG,
2018). This paper relies on KAOS. The required mod-
elling notations are described in this section and de-
picted in the legend of Figure 2. More details are pro-
vided in the reference book (van Lamsweerde, 2009)
and in a more focused application to co-engineering
(Ponsard et al., 2021). To illustrate the approach, we
use a light control subsystem. This case is actually
used in the standard itself (ISO, 2020). Despite its
limited size, it contains interesting issues to highlight
the benefits of our approach. It is also analysed by
method and tool developers (ASRG, 2020). Our mod-
elling will be divided in three viewpoints: the object
model capturing the domain, the goal model for prop-
erties and the obstacle model for risks.
3.1 Object/Asset Model
The object (or asset) model defines and interrelates all
the concepts involved in a system. It must be able to
capture all the vocabulary that is required to express
properties (especially about safety and security) that
will be structured in the goal model. It must also iden-
tify all valuable assets that could be threatened from a
cyber security point of view.
This model captures domain concepts using en-
tities, relationships, events or agents/attackers. The
modelling notation used is close to the UML class di-
agram (OMG, 1997).
Figure 2 represents the asset model of our case
study. The system is modelled using different ab-
stractions that can be reused across many subsys-
tems: Electronic Control Unit (ECU), sensors (the
lamp switch in our case), actuators (lamp controller)
and a variety of control devices (head lamps but also
some communication devices). The communication
is managed through an internal CAN bus on which
messages are exchanged. A gateway may also ensure
the bridge across subsystems, for example to connect
communication devices to the CAN bus. Objects can
have specific attributes reflecting important state in-
formation, e.g. the switch and lamp state.
3.2 The Goal Model
Goals capture, at different levels of abstraction, key
properties the considered system should achieve (van
Lamsweerde, 2009). The goal model structures goals
in the form of AND-OR trees which express refine-
ment relationships among goals. High-level goals can
be progressively refined into more concrete and op-
erational ones through relationships linking a parent
goal to several sub-goals, with different fulfilment
conditions using either “AND-refinement” (all sub-
goals need to be satisfied) or “OR-refinement” (a sin-
gle sub-goal is enough, i.e. possible alternatives). Re-
finement can be characterised by some tactics which
can help in checking their completeness and consis-
tency, e.g. case-based (making design distinctions) or
milestone-based (i.e. temporal steps). Goals can also
bear specific attributes characterising specific nature,
like safety of security which can be made graphically
visible through specific decorators (SAFE/SEC).
Figure 3 shows the modelling of a safety property:
lamp should be on at night (depicted by blue paral-
lelograms). In our manual design, this relies on the
fact the lamp is turned on if and only if the switch
is activated and the assumption (depicted by a yel-
low parallelogram) the driver will activate and keep
the switch on at night. Given the property (depicted
by the little house) that switch can only be on or off
(no auto-lightning considered), a case-based refine-
ment is used to distinguish two possible state changes
causes by turning the switching ON or OFF. The
AND-refinement is represented by a single yellow cir-
Goal and Threat Modelling for Driving Automotive Cybersecurity Risk Analysis Conforming to ISO/SAE 21434
835
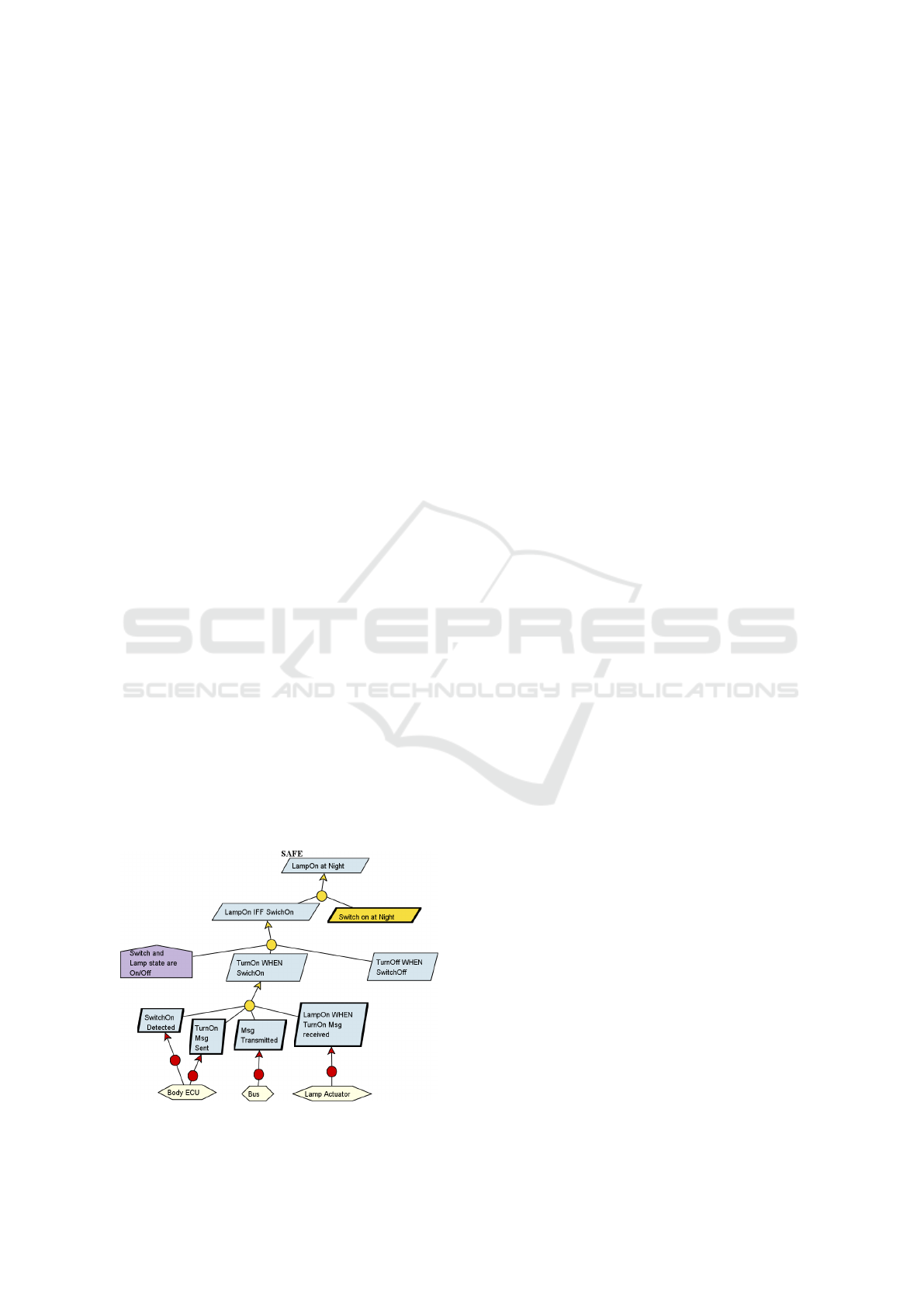
cle connecting refined goals and useful properties that
achieves an higher level goal. The “TurnOn WHEN
SwitchON” goal is further refined using a milestone
decomposition going through the whole communica-
tion chain: detecting the switch change by the ECU
then sending a message on the CAN bus, processing
it by the lamp controller to finally switch the lamp
on. Different monitoring and controlling agents are
involved in the process and are represented by yellow
hexagons. Goals under the direct control of an agent
are called requirements and have a thicker border.
3.3 The Obstacle Model
An obstacle represents an undesirable property. It is
the dual concept of a goal and can be used to rep-
resent a safety hazard or a security threat. It is de-
picted by red parallelogram in the opposite direction
than a goal. Obstacles can occur from the environ-
ment (i.e. a safety hazard) or be deliberately caused
by an attacker (i.e. a security threat) like an attacker
trying to take control of the light system. An attacker
is depicted by a red agent. Like goals, obstacles can
be refined using AND/OR trees, leading to decom-
position structures quite similar to FTA in safety or
AT in security. Refinement links can also be further
characterised by concrete tactics through more spe-
cific safety/security gates (not illustrated in this pa-
per). Leaf obstacles are either root causes (in safety)
or vulnerabilities (in security). An obstacle is usually
connected to the goal it is impacting through an ob-
struction relationship. Symmetrically an obstacle can
be mitigated by an additional requirement. Attacker
specific relationships also explicit the goal under at-
tack or the vulnerability that is exploited.
Figure 4 illustrates obstacles on a partial attack
decomposition unexpectedly turning the lamp on. It
can be achieved by an attacker accessing the bus and
Figure 3: Goal model of the light sub-system.
spoofing a CAN message. A possible mitigation is
to implement message integrity checks. Note the top
level safety goal is not broken but a similar attack
turning off the light at night would.
4 MODEL-BASED RISK
ANALYSIS
In order to comply with the ISO 21434 TARA pro-
cess, we will go through clauses 8.3 through 8.5 il-
lustrated in Figure 1 using the goal modelling frame-
work supporting safety and security co-engineering
described in Section 3. The Objectiver platform
(Respect-IT, 2005) is used as tool to build the model
and perform the risk assessment but also as prototyp-
ing platform thanks to its plugin mechanism.
4.1 Asset Identification (8.3)
The asset identification step was already covered in
Section 3.1 when presenting the object/asset model.
Assets are identified by analysing the system goals.
For example, the goal ”Lamp is On IFF Switch is On”
enables to identify the Lamp and Switch. The goal re-
finement process conducts to the identification of the
whole command transmission chain. Assets can also
structured using more generic concepts forming the
building blocks of a car (e.g. sensor, ECU, actuator)
as shown in Figure 2. Those can then be instantiated
in various subsystems.
Note the asset model can be further enriched
with architectural information useful for the attack
path analysis and later with components dealing with
counter-measures (not detailed in this paper).
4.2 Damage Scenario
Damage scenarios can be elicited by trying to system-
atically break goals by introducing obstacles. It can
be done on the different security dimensions of :
• Confidentiality. In this case, it is not relevant as
everyone can see when lamps are turned on.
• Integrity results in obstacles related to unexpect-
edly turning lights on or off.
• Availability results in obstacles related to impos-
sibility of turning lights on or off.
4.3 Threat Scenario Identification (8.4)
and Attack Path Analysis (8.6)
This step is performed through attack trees which in
SECRYPT 2021 - 18th International Conference on Security and Cryptography
836
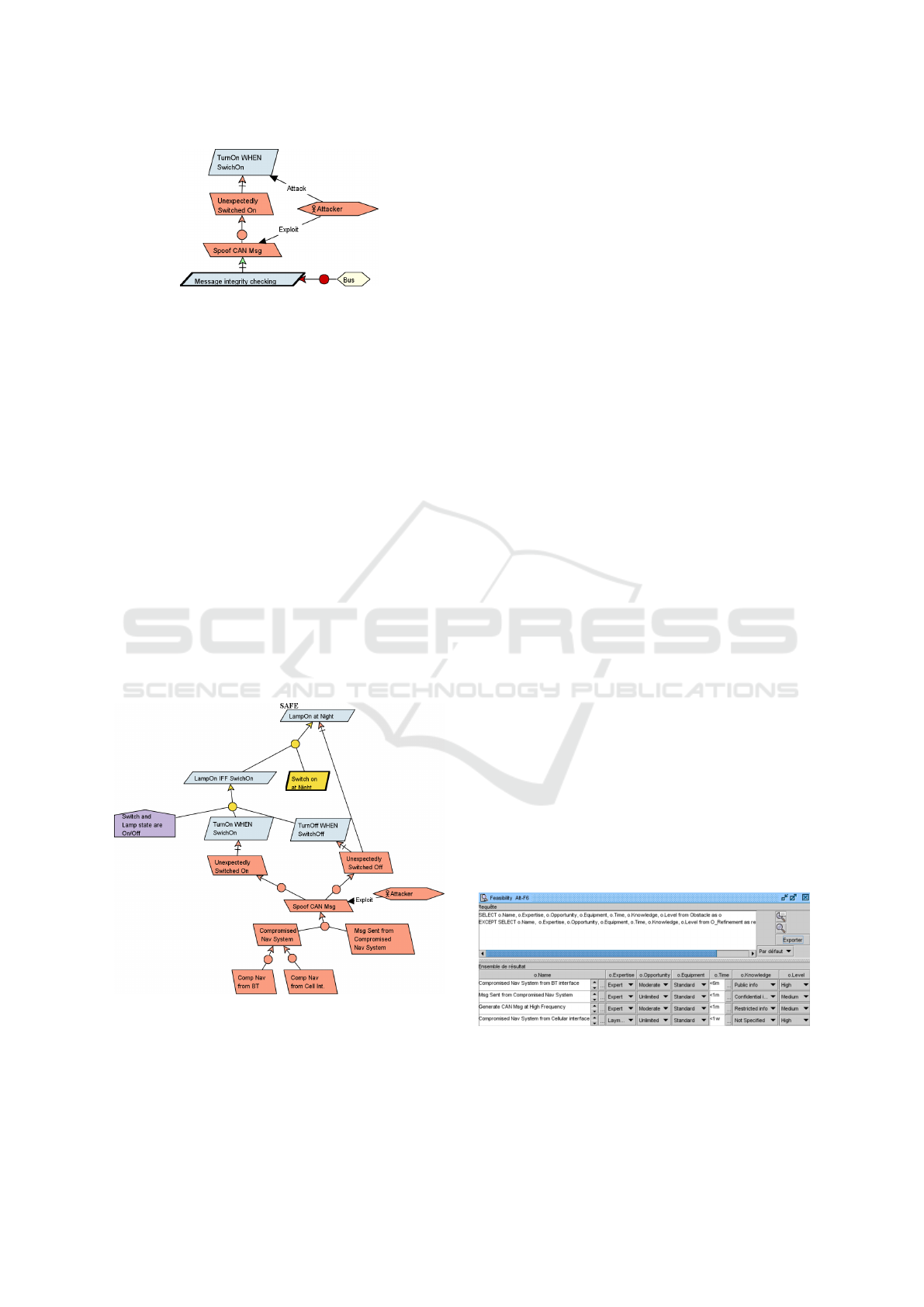
Figure 4: Obstacle (partial attack) on the light sub-system.
refinement of damage scenarios in a top-down ap-
proach or based on known vulnerabilities in a bottom-
up approach. The later requires a richer architectural
model which motivates to elaborate the object model
as described in Figure 2. The full refinement of threats
will naturally explore and discover different attack
paths. In our case, the asset model analysis reveals
a possible attack path using the media communica-
tion, either through the BT or cellular interface. From
there, it can launch specific attack actions impacting
either integrity or availability. The analysis can be
performed on each of those security dimensions sep-
arately to be more modular. Figure 5 shows our anal-
ysis for integrity were both channels can be used to
take control of the gateway and then some spoofed
messages can be sent on the bus to make the lamp ac-
tuator believe the switch state has changed. This is
depicted by a OR-refinement to compromise the nav-
igation system, although the risk might be different
for each path.
Figure 5: Analysis of the integrity attack paths.
4.4 Impact Rating (8.5)
The impacts have to be rated on four dimensions:
Safety, Financial, Operational and Privacy (SFOP)
(Sembera, 2020). In our case, there is no privacy im-
pact given the lights are publicly observable. Oper-
ation impact is major as it changes the expected be-
haviour of the car. There is also no direct financial
impact although the image damage might have an im-
portant indirect impact of this kind. About the safety
impact, it can be rated in more details by reasoning
on the safety impact of each threat w.r.t. the modelled
safety goal stating lamps should be on at night:
• R1 - Unexpectedly turning lamps on: has no im-
pact on the driver but may surprise another driver.
• R2 - Unexpectedly turning lamps off : can have a
major impact if it happens at night.
• R3 - Impossibility to turn lamps off : has negligible
impact although it can drain the battery.
• R4 - Impossibility to turn lamps on: has moderate
impact because it requires to switch to a degraded
mode, i.e. stop driving, at nightfall.
4.5 Attack Feasibility Rating (8.6)
To rate the feasibility of an attack, the process is first
to evaluate each path. Attack factors can be used to
rate each path against Time, Expertise, Knowledge,
Opportunity and Equipment factors. To support this,
we extended our tooling with the ability to capture
those attributes using a meta-model extension. The
various attack paths can be identified by looking at
the different paths leading to leaf nodes in the attack
tree. This can be implemented by a model query and
results in the table show in Figure 6. The resulting
table can be directly edited in our tooling.
The second step is to combine the factors de-
pending on the way the paths are combined: AND-
refinement will require to consider the minimal feasi-
bility level while the OR-refinement needs to consider
the maximal level. Note that other methods might be
considered to deal with a richer set of refinement gates
but are not elaborated here.
Figure 6: Feasibility analysis of the attack paths.
Based on this analysis, both the spoofing attack on
integrity can be assessed to a medium level while the
impact of the DOS attack on availability is low.
Goal and Threat Modelling for Driving Automotive Cybersecurity Risk Analysis Conforming to ISO/SAE 21434
837

4.6 Risk Determination (8.9)
Based on the combination of the rating of impact and
feasibility, it is possible to locate each risk in a qual-
itative risk matrix by using feasibility as column and
impact as line, as shown in Table 1. This can be di-
rectly computed by the tool from information present
in the model and then exported to a text processor ta-
ble or spreadsheet (Ponsard et al., 2015).
Table 1: Safety Risk matrix for the light sub-system.
Very Low Low Medium High
Severe
Major R2
Moderate R4
Negligible R3 R1
4.7 Risk Treatment Decision
Finally, actions must be taken to reduce the risks be-
low an acceptable level. It can rely on tactics to ac-
cept, avoid, mitigate or transfer them. This step is not
elaborated here due to space limitations.
5 CONCLUSION & NEXT STEPS
In this paper, we showed how to conduct a cyber secu-
rity risk analysis in the automotive domain conform-
ing to the new ISO 21343 standard. The proposed ap-
proach is model-based and also integrates with safety
analysis in line with ISO 26262, opening the way to
safety and security co-engineering. It was demon-
strated on a generic goal-oriented toolset and illus-
trated on an automotive sub-system. Although lim-
ited in size, our case study could show the benefits of
the approach related to the elicitation of threats, anal-
ysis of attack paths and assessment of risks. It also
has good automation, scalability and reuse possibili-
ties across sub-systems.
Based on this proof-of-concept, our next steps are
to elaborate the risk treatment phase and to consider
a larger case in the context of a on-going autonomous
driving project. We also plan to improve our tool sup-
port and move to a domain specific system engineer-
ing tool, more adequate for integration and adoption
in an automotive toolchain.
ACKNOWLEDGEMENTS
This work is partly funded by the CYRUS project of
the Walloon Region (nr 8227).
REFERENCES
ACWG (2018). Goal Structuring Notation Community
Standard, Version 2. The Assurance Case Working
Group https://scsc.uk/r141B:1?t=1.
ASRG (2020). ISO21434 by Example. Automotive
Security Research Group, https://www.youtube.com/
watch?v=3LsNx-ljIK8.
Hause, M. and Korff, A. (2007). An overview of sysml for
automotive systems engineers. ATZelektronik world-
wide, 2.
ISO (2011). ISO 26262-1:2011 Road vehicles — Func-
tional safety. https://www.iso.org/standard/43464.
html.
ISO (2018). Iso 31000, risk management - guidelines,
provides principles, framework. https://www.iso.org/
iso-31000-risk-management.html.
ISO (2020). ISO/SAE FDIS 21434 Road vehicles — Cy-
bersecurity engineering (draft). https://www.iso.org/
standard/70918.html.
Leopold, D. (2019). Relevance of iso 21434
for the automotive development process.
Itemis Blog https://blogs.itemis.com/en/
relevance-of-iso-21434-for-the-automotive
-development-process.
OMG (1997). Unified modeling language. http://www.omg.
org/spec/UML.
OMG (2005). System modeling language. http://www.omg.
org/spec/SysML.
Ponsard, C., Darimont, R., and Michot, A. (2015). Combin-
ing models, diagrams and tables for efficient require-
ments engineering : Lessons learned from the indus-
try. In Actes du XXXIII
`
eme Congr
`
es INFORSID, Biar-
ritz, France, May 26-29, 2015, pages 235–250.
Ponsard, C., Grandclaudon, J., and Massonet, P. (2021).
A goal-driven approach for the joint deployment of
safety and security standards for operators of essential
services. Journal of Software: Evolution and Process.
Respect-IT (2005). The Objectiver Goal-Oriented Require-
ments Engineering Tool. http://www.objectiver.com.
SAE (2016). Cybersecurity Guidebook for Cyber-Physical
Vehicle Systems - J3061 201601. https://www.sae.
org/standards/content/j3061 201601.
Schmittner, C. and Ma, Z. (2015). Towards a framework
for alignment between automotive safety and security
standards. In Computer Safety, Reliability, and Secu-
rity, pages 133–143. Springer.
Sembera, V. (2020). Iso/sae 21434 - setting the standard for
connected cars’ cybersecurity. Trend Micro Research.
Shiho Kim, R. S. (2020). Automotive Cyber Security: Intro-
duction, Challenges, and Standardization. Springer.
van Lamsweerde, A. (2009). Requirements Engineering -
From System Goals to UML Models to Software Spec-
ifications. Wiley.
Yu, E. and Mylopoulos, J. (1997). Enterprise modelling for
business redesign: The i* framework. SIGGROUP
Bull., 18(1):59–63.
SECRYPT 2021 - 18th International Conference on Security and Cryptography
838
