
Automatically Segmentation the Car Parts and Generate a Large Car
Texture Images
Yan-Yu Lin, Chia-Ching Yu and Chuen-Horng Lin
Department of Computer Science and Information Engineering, National Taichung University of Science and Technology,
No. 129, Sec. 3, Sanmin Rd., Taichung, ROC, Taiwan
Keywords: Simulation System, Car Model, Parts, Segmentation.
Abstract: This study is segmentation the car parts in a car model data collection and then use the segment car parts to
generate large car texture images to provide automatic detection and classification of future 3D car models.
The segmentation of car parts proposed in this study is divided into simple and fine car parts segmentation.
Since there are few texture images of car parts, this study produces various parts to generate many automobile
texture images. First, segment the parts after texture images in an automated method, change the RGB
arrangement, change the color, and rotate the parts differently. Also, this study made various changes to the
background, and then it randomly combined large texture images with various parts and the background. In
the experiment, the car parts were divided into 6 categories: the left door, the right door, the roof, the front
body, the rear body, and the wheels. In the performance of automated car parts segmentation technology, the
simple and fine car parts segmentation has good results in texture images. Next, the segment car parts and use
multiple groups to generate large car texture images automatically. It is hoped that we can practically apply
these results to simulation systems.
1 INTRODUCTION
Autonomous vehicle (autonomous vehicle) and
virtual reality (VR), augmented reality (AR), and
mixed reality (MR). In the latest technological
development, three-dimensional simulation system
has become the main research trend in computer
vision. A simulation system is a system that presents
real-world situations and physical feedback. It is
applied to autonomous driving, medical technology,
military training, aerospace technology, disaster
response, etc. To make the simulation system more
widely used and make the user's senses on the
simulation system more realistic, when entering
different situations, they can more experience the
reproduction of the actual scene, allowing the user to
experience multiple visual feelings, and the
simulation in the real scene contingency and
operation in a different environment. According to
the material properties assigned to the objects in the
simulation system, the system can present the effects
corresponding to the real world through the material
properties and reflect various environments' physical
characteristics in the real world.
In the real world, the color and texture of an object
can be visually distinguished from its parts and types
by the appearance attributes such as the refraction
angle of illumination, color, and transparency of the
light source, and determine the material properties of
various parts. However, if the parts of an object are
manually identified and the types of the parts are
marked one by one. Then the type of information of
these objects is input into the simulation system. It
will cost a lot of workforce and time.
Texture images can compare objects' appearance
better than shading and make the 3D model present a
more realistic simulation system. However, in the
absence of material information, the simulation
system's choice of situations will be limited.
Therefore, if the texture map can be classified into the
material first and map the label of this classification
to the 3D model and save the workforce and time of
sailing, it can also adapt to the simulation system of
different environmental changes. Even so, the
number of texture images corresponding to the 3D
model is not much. Take the texture image of a car as
an example, as shown in Figure 1. Therefore, in
addition to the material classification of texture
images, this study also proposes a method to generate
Lin, Y., Yu, C. and Lin, C.
Automatically Segmentation the Car Parts and Generate a Large Car Texture Images.
DOI: 10.5220/0010601301850190
In Proceedings of the 2nd International Conference on Deep Learning Theory and Applications (DeLTA 2021), pages 185-190
ISBN: 978-989-758-526-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
185
large texture images to detect and classify future 3D
car models automatically.
Figure 1: Texture image of the car.
To extract an object from an image, the commonly
used method is object segmentation. To accurately
distinguish the background and object area of the
image from the image, it depends on the precise
image segmentation technology (Gonzalez and
Woods, 2002; Pandey et al., 2019). In the past, image
segmentation methods can be divided into three
categories according to image pixels' characteristics.
The first type of method is called discontinuity, which
refers to the area where the pixel intensity value
changes drastically. The algorithms of this type
include the Gradient method (Gonzalez and Woods,
2002), Sobel edge detection (Gonzalez and Woods,
2002; Kubicek et al., 2019), Canny edge detection
[3,4,5](Canny, 1986; Xu et al., 2019), Laplacian edge
detection(Gonzalez and Woods, 2002), and Laplacian
Gaussian edge detection. The second type of method
is called similarity, which is based on pre-defined
criteria and segmentation of similar regions of the
image, including Threshold Method (Gonzalez and
Woods, 2002), Area Growing (Zhao et al., 2015),
Region Splitting and Merging (Gonzalez and Woods,
2002), and Clustering (Zhao et al., 2015). The third
type of method is hybrid techniques, which integrate
edge detection and region-based methods to obtain
more accurate image cutting results (Wang et al.,
2016).
This study uses traditional image processing
technology to automatically segment parts from the
existing two-dimensional car texture images and
generate many car texture images from the segment
parts. When building a car texture image, in addition
to the placement and number of layouts based on the
fineness of the car surface, the car parts also be
separated. Therefore, this study first performs
segmentation of the two-dimensional texture image
and then generates large car texture images for the
segment parts.
This study has two contributions. First, to reduce
the cost of marking object categories, this study uses
traditional image processing technology to auto-
segment parts with two-dimensional texture images.
Second, this study produces the background changes
of different texture images of the object model and
changes the shape, color, and rotation of the parts and
the background color system, and randomly generates
many texture images.
2 MANUSCRIPT PREPARATION
This study separates the car parts from the existing
car model's texture image by automatic segmentation
method. It then generates large car texture maps from
these parts to provide the future 3D car model to
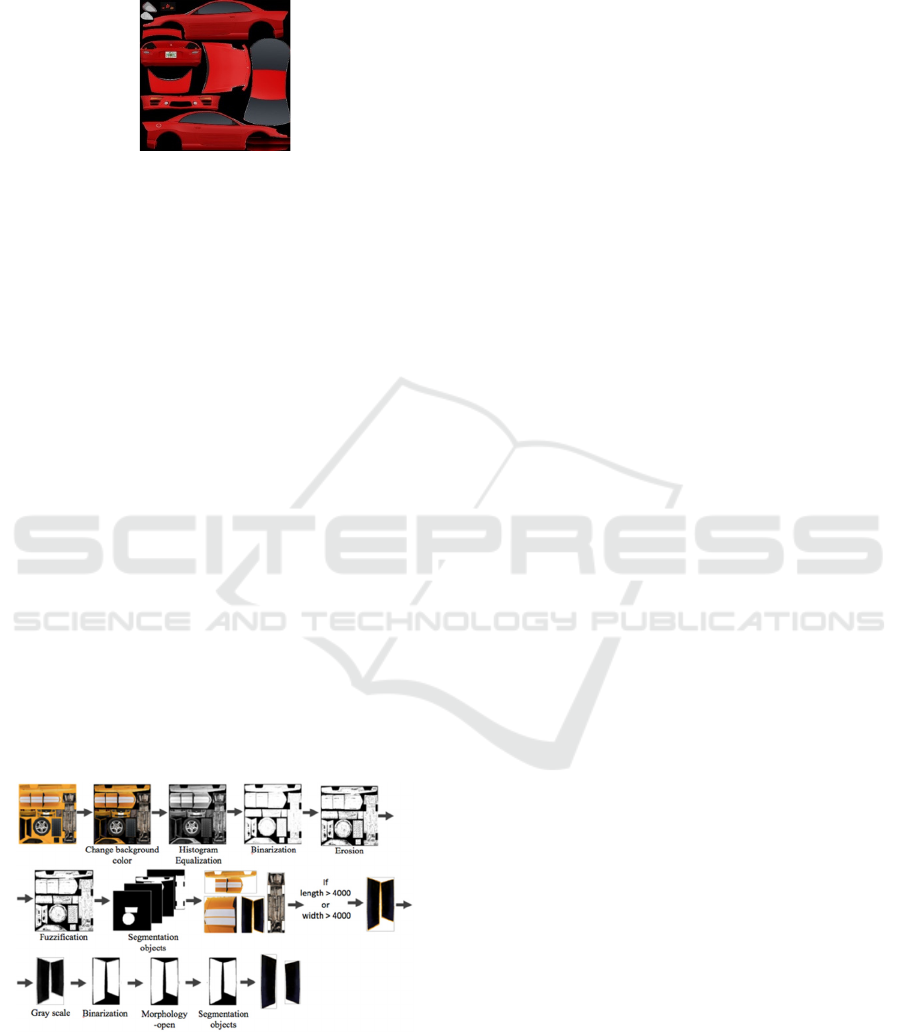
detect and classify car parts. The processing flow is
shown in Figure 2. This study is divided into two
stages. The first stage uses automated segmentation
technology to segment the parts of two-dimensional
car texture images. In the second stage, various types
of changes and different background types are added
to these parts to generate large car texture images.
Figure 2: The processing flow of this study.
2.1 Automated Segmentation of Car
Parts
The two-dimensional car texture image is composed
of multiple parts. Because the parts are closely
arranged, and there are no rules, the texture's
presentation method varies for the creator. The styles
presented on the texture also have obvious
differences, as shown in Figure 3. Therefore, this
study proposes a segmentation technology for car
parts. Two different segmentation technologies are
proposed according to the different characteristics of
the texture images. The first segmentation technology
is for textures with large differences between the parts
and the background color and is called the simple
segmentation method of car parts. The second
segmentation technology is for textures with small
differences between the parts and the background
color and is called the fine segmentation method of
DeLTA 2021 - 2nd International Conference on Deep Learning Theory and Applications
186
car parts. The two segmentation technologies used
above are referred to as automated segmentation of
car parts.
Figure 3: Texture image of the car.
Simple Segmentation Method of Car Parts: First
convert the color car texture image into a grey image,
then do the binary image, and finally perform the
part's labelling to detect the part and segment.
Fine segmentation method of car parts: if a simple
segmentation method is used to the color difference
between parts and the background color in an image
is small, and the parts cannot be completely
segmented. Therefore, this study first converts the
color image into a grayscale image, then adjusts the
contrast of the image grayscale by histogram
equalization, then performs binarization, and then
uses erosion blurring to remove the impurities of the
part. Finally, the parts are labelled, and the parts can
be detected and segmented. The processing flow is
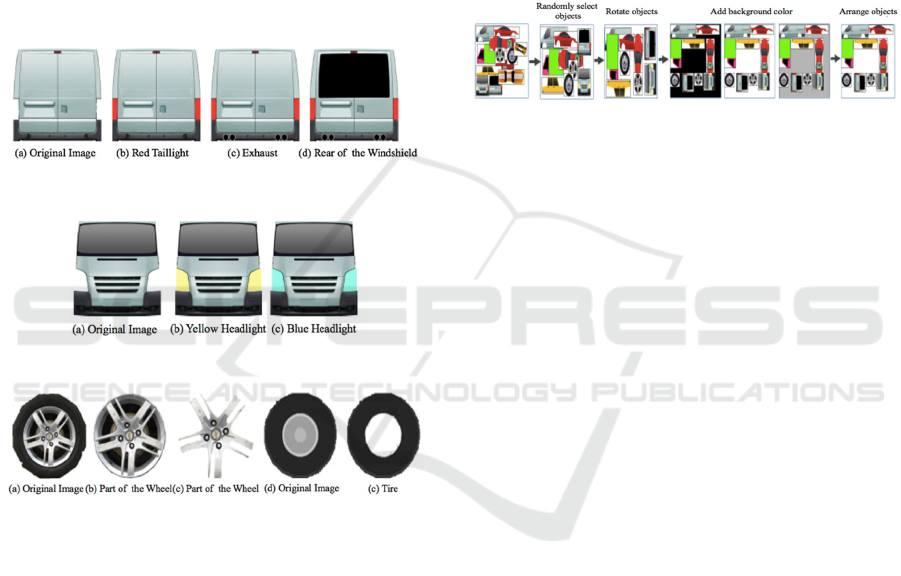
shown in Figure 4. To filter the overlap of some parts,
large objects segment to more than two parts are
caused. Therefore, after calculating all parts' size in
this study, if the cut part's length or width exceeds
4000 pixels, we convert the part image to a grayscale
image. Then the grayscale image is binarized to the
opening is processed to remove the noise between the
parts, and then the parts are cut so that we can cut out
those independent parts.
Figure 4: Fine segmentation process flow of car parts.
Histogram Equalization: When the color of the
parts in the texture image is similar to the
background, the parts are not easily separated from
the background, or the parts' outline is less obvious.
Therefore, this study equalized the histogram of the
grayscale image to make the overall color scale
distribution of the image more uniform to enhance the
contrast of the image color scale and improve the
discrimination between the part and the background.
Gaussian Blur: The parts in the texture image are the
areas surrounded by contour lines, and they are
enclosed in a closed shape. Because some parts in the
texture have light shades and noise points in the
background area, this study uses Gaussian blurring to
reduce the image's noise.
Binarization: First convert the color texture image
into a grayscale image, then use Otsu’s(Otsu, 1979)
method to obtain the binarization threshold, and
finally binarized the grayscale image.
Erosion: It uses a fixed-size filter to perform a
convolution operation on a grayscale image.
Dilate: Use filters of different sizes to perform
convolution operations on grayscale images.
Contour: This study can obtain the contour of the
part by subtracting the original part from the area of
the part that has been eroded or expanded.
Segmentation of Parts: After obtaining the contour
mask of each part one by one, we can obtain the parts
in the original texture corresponding to the mask area.
2.2 Automatically Generate Large Car
Parts Texture Images
Due to the small number of existing texture images,
there are not many parts. Therefore, to increase the
number and variety of training images, this study
produces large and diversified texture images for
training. First, make different changes to the parts
after automatic segmentation, such as the RGB
channel arrangement, color, and parts of different
angles. We also make different changes to the
textured background and then randomly combine
various parts with the background to generate large
texture images, which can be used as training images
for future deep learning models. This study changes
the shape, color, and rotation of the parts and the color
system of the background and then randomly
combines them to generate a large number of texture
images.
The Shape of the Part: The part's appearance is
changed on an equal basis and meets the part types of
Automatically Segmentation the Car Parts and Generate a Large Car Texture Images
187
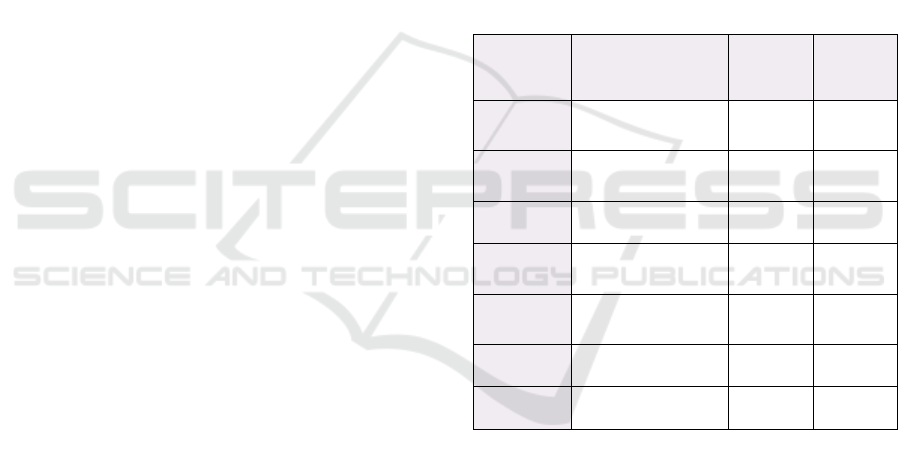
conditions. This study adds three new arrivals: (1)
Add red rear lights and exhaust pipes on the rear body
of the car and the rear windshield, as shown in Figure
5.; (2) The yellow headlights and cyan headlights of
the front body of the vehicle are added, as shown in
Figure 6.; the tire frame and part of the new car tires.
The tire frame and tire skin are shown in Figure 7.
Figure 7b. is to remove the black part of the tired skin
in Figure 7a., and only the silver tire frame is taken;
Figure 7c. is to extract the disc surface pattern in the
center of Figure 7b.; Figure 7e. is to take Figure 7d.
The black tire skin part. In this study, we added
additional small details to the original parts and
extracted some features from the original parts, and
we added parts and quantities in this way.
Figure 5: The car rear body.
Figure 6: The car front body.
Figure 7: Car tires.
The Color of the Parts: Because the car's metal shell
has the possibility of various colors, this study
changes the order of the RGB channels to combine
the parts with multiple colors. The way to change the
channel is to change the RGB channel's arrangement
without changing the RGB value. A total of 6
arrangements (RGB, RBG, GRB, GBR, BGR, BRG)
can generate 6 different color textures images.
Rotation of Parts: randomly rotate each part, the
angle of rotation is in units of 90 degrees, and the
range of part rotation is from 0 to 270 degrees.
Background Color: After observing the background
color of the original texture image, this study uses
white, grey, and black as the background color of the
new texture image.
Texture image generation: Because of the
irregular arrangement of the parts of the texture
image, the angle, and direction of the placement are
also not fixed, the number of types of parts is also
different, and the background colors of the textures
are also quite diverse. Therefore, this study generates
large car texture images based on the original texture
images' design and placement. The production
process is shown in Figure (17)-first, randomly select
parts from all categories, with 8 to 10 parts. Next, the
rotating parts are arranged in a non-fixed interval, and
finally, various parts are randomly arranged and
placed to generate large car texture images.
Figure 8: The process of generating texture images.
In this study, the number of parts categories, part
type, and RGB channel sorting is used to generate
texture images. The texture training set will be
generated in 4 different ways, called "Type-1",
"Type-2", and "Type-1", "Type-2", and "Type-2".
The "Type-3" and "Type-4" texture training sets are
generated and combined. The number of parts
categories in the table is the number of parts
categories in the generated image, divided into "all
categories" and "single category only." The part types
are combined by "original parts" or "newly created
parts," respectively. The RGB channel refers to the
"grayscale part image" and "the arrangement and
combination of all color channels." Type-1 is a new
texture image composed of all parts categories,
original parts, and 6 color images. Type-2 is a new
texture image composed of all types of parts, newly
generated parts, and grayscale images. Type-3 is a
new texture image composed of all parts categories,
newly generated parts, and 6 color images. Type-4 is
a new texture image composed of all single part types,
newly generated parts, and 6 color images.
3 EXPECTED RESULTS
This experiment uses a small amount of 2D car model
datasets. In addition to verifying the effectiveness of
the automatic segmentation of car parts proposed in
this study, we also segment the car parts to generate
large car texture images. In this experiment, the 2D
car texture image is used for the automatic part
segment. The car part images are produced according
DeLTA 2021 - 2nd International Conference on Deep Learning Theory and Applications
188
to different settings to produce multiple sets of
different types of image data.
3.1 Experimental Environment
In this study experiment, the CPU processor system
is Intel Core i7-4790, the GPU processor is NVIDIA
GeForce GTX 1080Ti 11GB, and 16GB memory is
used. The host uses Windows 10 as the system
environment, the programming language uses
Python, and the image pre-processing and other
image processing programs use the OpenCV Library.
3.2 Datasets
The parts in the texture image of this experiment are
all related parts of the car body. In this study, five
texture images with target types of parts are selected
for use in the cutting experiment of texture image
parts. Among them, there are mainly two styles of 3
images of "cars" and 2 images of "RVs." On average,
each image has 6 different types of parts.
3.3 Car Parts Segmentation Results
and Analysis
The experimental evaluation of the part segmentation
of the car texture image is based on the number of
parts after the division and the part appearance's
completeness as the judgment standard. There are a
total of 88 car parts in the experiment. After simple
segmentation, the correct part number is 61, the loss
parts are 27, and the over segment parts are 62. There
is no gap between the parts, and the color difference
between the background and the parts is small,
resulting in unsatisfactory segmentation results. After
fine segmentation, the correct part number is 59, the
loss parts are 29, and the over segment parts are 19.
The number of correct cuts for fine segmentation has
been reduced by two, but the number of over-segment
parts has been reduced from 62 to 19. Finally, the
results of the two segmentation are combined to
obtain parts for simple and fine segmentation.
3.4 Generate Texture Images of Car
Parts
Since the ready-made 3D model provides few texture
images, the texture image production method is
artificially generated, so there are no rules. The parts
are not easy to separate, and there are not many parts
after segmentation. Therefore, this study creates
training images with diversified parts. First, the
texture image parts automatically segmented, change
the RGB channels' arrangement, change the color and
rotate the parts. Also, various changes are made to the
background. Large texture images are randomly
combined with various parts and backgrounds to
serve as training images for deep learning models.
Table 1. is a statistical table of the number of
parts in this study. There are a total of 50 original
parts from the texture image. Among them, the
number of parts for the front body is the least, with
only 3 parts for the front body, and the number of
parts for the wheels is the most, with 20. Therefore,
this study modifies the color of the original parts,
attaches small parts to the original parts, and increases
the parts' diversity and applications. Finally, 281
parts, the original parts, and the newly added parts
generate large car texture images.
Table 1: Statistics of the number of parts.
Class
label
Number of parts
after segmentation
Add
parts
Parts
total
The car
left body
6 39 45
The car
right body
4 26 30
Roof 12 4 16
The car
front body
3 117 120
The car
rear body
5 20 25
Wheel 20 25 45
Parts total 50 231 281
Table 2. shows the initial number of images, the
number of parts, and additional training sets for the
subsequent 4 groups. Type-1 is a new texture image
composed of all parts categories, original parts, and 6
color images. Type-2 is a new texture image
composed of all parts categories, newly generated
parts, and grayscale images. The content of the data
set has changed more than the Type-1 data set. Type-
3 is a new texture image composed of all parts
categories, newly generated parts, and 6 color images.
Type-4 is a new texture image composed of all single
part categories, newly generated parts, and 6 color
images so that the number of parts is more even.
Automatically Segmentation the Car Parts and Generate a Large Car Texture Images
189
Table 2: Statistics of the number of parts and training
images.
Image Type-1 Type-2 Type-3 Type-4 Total
Left
car door
6 305 450 245 2240 3246
Right car
door
4 240 460 275 2095 3074
Roof 12 245 570 355 2090 3272
The car
rear body
5 285 450 300 2125 3165
The car
front body
3 260 605 385 2155 3408
Wheel 20 305 565 295 2080 3265
Parts
total
50 1905 3100 1855 12785 19695
Image
total
5 4500 10500 5250 6300 26555
4 CONCLUSIONS
This study proposes a set of processing procedures for
the material classification of the part model of the
simulation system to reduce the manual increase of
the part model's material information and reduce the
huge workforce and time. The texture image hand
first uses traditional image processing technology to
segment various parts in the texture image and
generate large texture images. The part classification
of 2D texture images is to overcome a small number
of texture images. The texture image used in the
experiment has a total of 88 parts. After the automatic
segmentation experiment, the number of fine
segmentation is reduced by two than the correct
segmentation of simple segmentation. Still, the
number of over-segment parts is reduced from 62 to
19. The reason is that there are no gaps between the
parts, and the color difference between the
background and the parts is small, resulting in
unsatisfactory segmentation results. The two
segmentation methods have good results in different
texture images. Combine the results of the two
segmentation to obtain automatically segmented
parts. This study automatically segmentation the
texture image parts, changes the arrangement of the
RGB channels, changes the color and rotation of the
parts, etc., and makes various changes to the
background and randomly combines large texture
images of various parts and backgrounds deep
learning model. Training images to improve the
classification accuracy of the parts category.
ACKNOWLEDGEMENTS
This work was supported in part by Ministry of
Science and Technology, Taiwan, under Grant No.
MOST 109-2221-E-025-010.
REFERENCES
Gonzalez, R. C. and Woods, R. E. (2002). “Digital Image
Processing”, Prentice-Hall.
Kubicek, J., Timkovic, J., Penhaker, M., Oczka, D.,
Krestanova, A., Augustynek, M. (2019). "Retinal blood
vessels modeling based on fuzzy sobel edge detection
and morphological segmentationn", Biode-vices, vol.
1, pp. 121-126.
Canny, J. F.(1986). “A Computational Approach to Edge
Detection,” IEEE Transaction on Pattern Analysis and
Machine Intelligence, vol. 8(6), pp. 679–698.
Ding, L. and Goshtasby, A. A. (2001). “On the Canny Edge
Detector,” Pattern Recognition, vol. 34(3), pp. 721–
725.
Xu, H., Xu, X., Xu, Y. (2019). Applying morphology to
improve Canny operator's image segmentation method.
The Journal of Engineering, 2019(23).
Aslam, A., Khan, E.,and Beg, M. M. S. (2015)."Improved
Edge Detection Algorithm for Brain Tumor
Segmentation", Second International Sympos-ium on
Computer Vision and the Internet, vol. 58, pp. 430-437.
Wang, H., Huang, T.-Z., Xu, Z., Wang, Y. (2016). "A two-
stage image segmentation via global and local region
active contours", Neurocomputing, 205 (2016) ,
pp. 130-140
Lorencin, I., Anđelić, N., Španjol, J., and Car, Z. (2020).
“Using multi-layer perceptron with Laplacian edge
detector for bladder cancer diagnosis,” Artificial
Intelligence in Medicine, vol. 102, article 101746.
Pandey, R. K., Karmakar, S., Ramakrishnan, A., and Saha,
N. (2019). "Improving facial emotion recognition
systems using gradient and laplacian images".
Zhao, M., Liu, H., and Wan, Y. (2015)."An improved
Canny Edge Detection Algorithm", IEEE International
Conference on Progress in Informatics and Computing,
pp. 234-237.
Otsu. N. (1979). A threshold selection method from gray-
level histograms. IEEE Transactions of Systems, Man,
and Cybernetics, 9(1). pp. 62-66.
DeLTA 2021 - 2nd International Conference on Deep Learning Theory and Applications
190
