
Safety-based Platoon Driving Simulation with Variable
Environmental Conditions
Youngjae Kim
a
, Nazakat Ali
b
and Jang-Eui Hong
c
Department of Computer Science, Chungbuk National University, Cheongju, Republic of Korea
Keywords: Platoon Driving, Safety, Variability, VENTOS Simulation, Cyber-Physical System.
Abstract: In platoon driving, a group of autonomous vehicles drives by forming one platoon to achieve advantages such
as fuel efficiency and traffic congestion reduction. Ensuring the safety of such a platooning system is very
challenging due to unexpected driving conditions e.g., adverse weather and obstacles on the road. Therefore,
the safety of a platooning system should be guaranteed even in variable weather conditions. In this paper, we
investigate the platooning system's unexpected behavior due to adverse weather conditions and provide safety
guards to avoid potential hazards. Simulation techniques are essential to confirm that the designed safety
guards work correctly, because testing such systems in a real situation can be highly expensive. Therefore,
we extended VENTOS, an open-source platoon driving simulator to verify the provided safety guards, which
can prevent risks under diverse weather scenarios e.g., fog, rain, snow, etc. Our simulation results show that
the proposed safety guards for adverse weather conditions can enhance the safety of the platooning systems.
1 INTRODUCTION
Nowadays, autonomous vehicles have become one of
the emerging technologies, and they can be a standard
way of transportation in the near future (Bagloee et
al., 2016). An autonomous vehicle is a type of Cyber-
Physical System (CPS) that collects information
about the road environment using various sensors like
camera, radar, and LIDAR (Light Detection and
Ranging sensors), and then actuates through actuators
like engine and steering based on the information. An
autonomous vehicle that drives by itself is a safety-
critical system that can lead to significant hazards,
such as loss of life and injury, etc., if the safety of
such a safety-critical system is not ensured properly
(Kalra, 2017).
Several standards are published or being
developed to guide and ensure the safety of
autonomous vehicles. ISO 26262 standard (ISO
26262, 2018) addresses the safety associated with the
entire life cycle of all electrical-electronic equipment
mounted on a vehicle. Other standard ISO/PAS
21448 (ISO/PAS 21448, 2019) was published to
address the safety of the intended functionality. The
a
https://orcid.org/0000-0002-0011-1216
b
https://orcid.org/0000-0002-3875-812X
c
https://orcid.org/0000-0001-9786-7732
other standard ISO/SAE FDIS 21434 (ISO/SAE
FDIS 21434, n.d.) is under development to protect
vehicles from cybersecurity attacks.
Despite these efforts, it is very difficult to achieve
rigorous safety for autonomous vehicles (Koopman &
Wagner, 2016). Autonomous driving in a platoon is
even more difficult, in which several autonomous
vehicles are driven by forming one platoon with a
narrow distance between vehicles. In platoon driving,
member vehicles exchange information with each
other using V2X (Vehicle to Everything) wireless
communication so that each vehicle can grasp
surroundings and respond agilely. The platooning
system, a representative example of collaborative
CPS, is recently in the limelight due to several
advantages such as enhanced traffic throughput,
lower energy consumption, pollution reduction, and
so on (Jia et al., 2015). These benefits are due to the
narrow distance between member vehicles. The
narrow distance can be obtained by collecting real-
time data about the other vehicles in the platoon. This
is achieved by using the Cooperative-Adaptive Cruise
Control (C-ACC) technique (Milanés & Shladover,
2014; Xiao et al., 2017).
558
Kim, Y., Ali, N. and Hong, J.
Safety-based Platoon Driving Simulation with Variable Environmental Conditions.
DOI: 10.5220/0010584505580565
In Proceedings of the 16th International Conference on Software Technologies (ICSOFT 2021), pages 558-565
ISBN: 978-989-758-523-4
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
A number of studies have been conducted to
ensure the safety of platoon driving (Xu et al., 2014;
Rahman & Abdel-Aty, 2018). In particular,
variability occurred in complex road environments
can have great risks due to its difficulty in predicting
and reproducing the situation. The possible risks from
variability like changeable weather conditions must
be considered in the development phase of a platoon
driving application. Although the ISO/PAS 21448
standard addresses risks that may be arisen due to
environmental variability, it is hard to find relevant
previous research in the platoon driving domain.
In this paper, we investigate environmental
variability (e.g., fog, rain, snow, etc.) in platoon
driving in order to provide safety guards to reduce the
risks caused by the variability. Considering diverse
scenarios, we defined a number of safety guards to
ensure platoon driving safety, particularly in case of
an unexpected scenario. Also, validating the safety
guards with real vehicles on real roads requires high
costs due to limited environments and potential
accidents. Thus, it is necessary to validate them
through simulation. Now, several simulators are
available for platoon driving. However, they did not
consider risks such as diverse environmental
conditions and also did not reflect such safety
requirements. Therefore, in our work, we extend an
open-source platoon driving simulator, named
VENTOS (VEhicular NeTwork Open Simulator)
(Amoozadeh, 2015) (VENTOS, n.d.), to reflect the
safety requirements for variable environmental
conditions. We simulate and analyze the effects of
safety guards designed to reduce the corresponding
risks to the variable environments with platoon
driving case study.
2 VARIABILITY AND SAFETY
GUARD IN PLATOON DRIVING
The goals of platoon driving are to reduce fuel
consumption and traffic congestion. However, the
degree of achieving safety goals is highly dependent
on the distance between member vehicles in a
platoon. The smaller the distance, the more
aerodynamic drag is reduced. However, the smaller
distance may lead to safety challenges of stable
driving and collision avoidance, and also serious risks
in platoon driving can bring out the loss of life. The
variable environments can have a significant impact
on the safety of autonomous vehicles. In the
following subsections, we first categorize possible
variabilities in the autonomous platooning system
that may lead to a number of uncertainties. After the
classification, we focus on environmental variability
with a number of variable scenarios, and define safety
guards to avoid dangerous situations during runtime.
2.1 Variability in Platoon Driving
2.1.1 Variability in CPS Applications
We classified potential variabilities that may lead to
uncertainties in CPS applications as below (Ali et al.,
2020):
Environmental variability
Physical variability
Spatial variability
Temporal variability
Environmental variability refers to the
variabilities that affect the performance of sensors
and actuators of CPS, such as dense fog, heavy rain,
strong sunshine, snow, etc. The physical variability
can be occurred due to a diverse set of hardware
devices or due to heterogeneous communication
infrastructure. Spatial variability is the variability
caused by spatial interference of CPS by other CPS or
other near objects. And temporal variability is the
variability caused by unexpected time differences in
systems like response time delay, the overhead of the
system etc.
Table 1 lists typical examples of applying the
above classification of variability to platoon driving.
Table 1: Examples of variability in platoon driving.
Variability Type Examples
Environmental
variabilit
y
Fog, Ice, Heavy rain, Snow,
Strong win
d
, and Sunshine.
Physical
variabilit
y
Battery aging, Tire wear,
and LIDAR
p
ower degradation.
Spatial
variabilit
y
Distance from another vehicle,
and Garbage dumped on the roa
d
.
Temporal
variabilit
y
Communication response delay,
and Overhead of ECU in the vehicle.
2.1.2 Environmental Variability in Platoon
Driving
Environmental variability was included in the scope
of the ISO/PAS 21448 standard published in 2019.
This standard, also named SOTIF (Safety of the
Intended Functionality), is established to reduce the
risks that can be occurred without functional failure.
Table 2 shows the topics covered by the ISO/PAS
21448 standard.
Safety-based Platoon Driving Simulation with Variable Environmental Conditions
559

Table 2: Safety relevant topics addressed by the ISO/PAS
21448 standard (ISO/PAS 21448, 2019).
Source Causes of the hazardous event
System
▪ Performance Limitations or insufficient
situation awareness, with or without
reasonably foreseeable misuse.
▪ Reasonably foreseeable misuse, incorrect
human-machine interfaces.
External
factor
▪ Impact from car surroundings (other users,
‘passive’ infrastructure, environmental
conditions: weather, Electro-magnetic
interference, ...)
Although several factors are involved in
environmental variabilities, our investigation focuses
on the following variable elements to ensure safety in
platoon driving:
Cloud: Cloud reduces the light intensity, which
can cause performance limitations on the
camera sensor.
Rain: The road may be slippery, increasing
braking distance by rain. It reduces the
perception of the vision systems in object
recognition.
Fog: Fog affects the camera vision system,
making it difficult to distinguish road
conditions and other objects.
Snow: Snow increases braking distance by
freezing the road and hinders the correct
steering of the vehicle. Also, piled snow can
disturb the vision system by covering its lens.
Cold Weather with Rain: Cold weather with
rain can make black ice (a.k.a. an assassin on
the road).
Heatwave: Overheated Engines can cause a
fire.
Strong Wind: Strong wind interferes with
vehicle controls especially when crossing
bridges or high-level roads.
Strong Sunshine: Strong sunshine hinders the
detection of forwarding objects. And it can
cause performance limitation in vision systems.
2.2 Safety Guards for Platoon Driving
2.2.1 Types of Safety Guards for CPS
Applications
CPSs are a safety-critical system that requires safety
guards to prevent dangerous situations. These safety
guards can be classified into two; safety guards for
pre-identified hazardous situations and safety guards
for unidentified hazardous situations (Wu et al.,
2017). The first one is reflected in the system
specification and then becomes part of the intended
functionalities in the system. The ISO/PAS 21448
standard suggests continuous modification of
functions to avoid identified risks. However, it is
impossible to identify all possible risks at the design
time of the system. Thus, as the second one, we
provide the safety guards for the potential risks which
are unknown at design time or training time.
2.2.2 Safety Guards and Its Roles
Representative safety guards and their roles applied
to platoon driving are given as below:
Slowdown: Slowdown of vehicle speeds is an
essential safety guard in almost cases under all
members slowdown simultaneously.
Speed Up: In certain situations, speeding up
may be necessary to avoid rear-end collision.
Lane Change: In certain situations, an accident
can be avoided by lane changing from a
hazardous lane.
Distance Gap Adjustment: Increasing or
decreasing the distance gap between vehicles in
the platoon can help to get more safe distance or
achieve the goal of platoon driving.
Platoon Splitting: In the case of a large size
platoon, communication can be a problem due
to signal coverage. Therefore, splitting the
platoon into smaller sizes can increase the
stability of the platoon.
Dissolution: In certain situations, it can be
difficult to maintain platoon driving (e.g.,
malfunction of a participant vehicle in the
platoon). In this case, the platoon can be
dissolved to promote safety at the individual
vehicle level.
Distance Expansion with Outsiders:
Increasing the distance between a platoon and
another platoon (or other vehicles) is an
essential task to ensure safety in platoon
driving.
Propagation of Hazardous Situation:
Platooning vehicles can receive information
from RSU (Road-Side Unit) or other vehicles.
Meanwhile, vehicles can transmit traffic
information to other vehicles and RSU using
V2X communication.
Emergency Alert Signal Operation: Sending
alert and blinking signals to surrounding
vehicles can prevent an additional hazardous
situation.
The real world is dynamic, therefore, predicting
all hazardous situations is impossible. Although state
ICSOFT 2021 - 16th International Conference on Software Technologies
560

machine is considered to design and analyze each
safety guard for the hazardous situation, it can cause
state explosion and further increase the complexity of
the system (Kress-Gait, 2011). Therefore, it is
efficient to design the safety guards in advance
without considering hazardous situations, then select
and apply appropriate safety guards in order to
counteract the specific situation.
3 EXTENSIONS OF VENTOS
3.1 VENTOS Platoon Driving
Simulator
VENTOS is an open-source simulator developed by
UC Davis University to support platoon driving.
VENTOS simulator is a combination of two open-
source simulators; the road traffic simulator SUMO
(Simulation of Urban Mobility) (Behrisch, 2011)
(SUMO, n.d.) and the network simulator OMNET++
(Objective Modular Network Testbed in C++)
(Varga, 2010) (OMNET++, n.d.). In the VENTOS
simulator, many kinds of platoon driving strategies
such as platoon merging, platoon splitting, and
leaving from the platoon are implemented well. In
particular, the TraCI (Traffic Control Interface)
included in SUMO provides a convenient interface
for simulation control from external.
However, VENTOS had been developed
primarily with considering functional requirements
only for platoon driving. Safety of platoon driving
was not considered in VENTOS development.
Therefore, it is inappropriate to simulate possible
risks and safety guards in the development of platoon
driving application, as it had been constrained that no
risks occur during platoon driving. Hence, this paper
extends the VENTOS by modifying its source code
so that it can be used for verifying the safety of
platoon driving. Such extensions should be utilized
the scenario-based verification for hazardous events
presented in the ISO/PAS 21448 standard.
3.2 Implementation of the Effects of
Variability
For the realization of our scenarios for safety guards,
the source code of VENTOS were modified, and
some other modifications were made to SUMO. This
subsection briefly explains every implementation or
modification that is performed to SUMO.
In VENTOS, each vehicle determines its behavior
through the planMove function. These determined
results of the planMove function are executed in the
updateState function for the actual run. The risk
imposed by environmental variability cannot be
considered to determine the motion of the vehicle.
Therefore, implementing variability in the
updateState function can lead to unexpected
movements of vehicles by external influences. In
particular, sensor problems can lead to unusual values
delivery to the ECU of the vehicle. In this case, the
vehicle makes unreasonable decisions that are not
suitable for the actual environment.
Determining acceleration and deceleration is the
most important action for platooning vehicles. The
acceleration or deceleration of a platooning vehicle is
decided in the function followSpeed within the
carFollowingModel. We added the unexpected
acceleration or deceleration by modifying the source
code of the function followSpeed.
3.3 Implementation of Safety Guards
in Platoon Driving
Safety guards for abnormal situations can be
implemented in the function planMove in SUMO that
determines the behavior of platooning vehicles.
Otherwise, it is also possible to implement safety
guards in VENTOS itself and provide it to SUMO
simulation via TraCI. This allows for the
implementation of more appropriate and diverse
safety guards, especially in the context of platoon
driving.
4 SCENARIO VALIDATION
To demonstrate that our simulation approach is useful
to verify the safety of platoon driving, we prepare a
scenario in which environmental variability factors
are considered as follows.
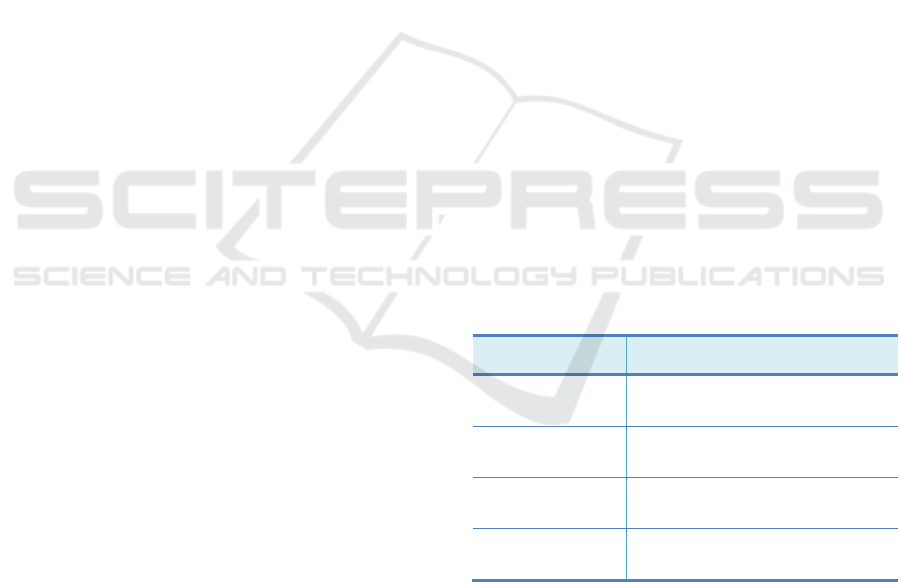
4.1 Definition of the Scenario
We define a scenario to validate our approach. As
shown in Figure 1, the eight same vehicles are driving
by forming a platoon on the expressway which has
two lanes in one direction. The red-colored vehicle is
the leader of the platoon and member vehicles of the
platoon are shown in gradational blue color. The
platoon is driving in the first lane of the highway with
a target speed of 25 m/s (90 km/h) and a time-gap of
0.7 seconds. The first lane is occupied for
autonomous vehicles or platoons recommended by
the Automated Highway System (AHS) (Fenton &
Safety-based Platoon Driving Simulation with Variable Environmental Conditions
561
Mayhan, 1991). The configuration of this platoon is
shown in Table 3.
Figure 1: Simulation Map.
Table 3: Platoon Configuration.
Vehicle ID
veh.0 veh.1 veh.2 veh.3 veh.4 veh.5 veh.6 veh.7
Depth 0 1 2 3 4 5 6 7
Roll
Leader Followers
Color
Red Deep Blue – – – – – – – – – – Light Blue
In our scenario (Figure 1), a vehicle in the dense
foggy area marked with a gray circle has low
visibility of the distance about 50 meters. Also, in the
middle of the foggy zone, there is a yellow vehicle
that has stopped due to a malfunction. This scenario
poses a serious safety concern if the leader could not
recognize the stopped car in the foggy zone. In this
case, an appropriate safety guard should be applied to
the leader vehicle to avoid the risks from the dense
fog.
4.2 Implementation and Results of
Hazardous Scenario
4.2.1 Implementation of Variability
To simulate the hazardous scenario, we inject the
dense fog effect into the VENTOS. The variable
frontGap, which means the distance to the preceding
vehicle, and used in the vehicle's speed determination
algorithm, is modified to recognize the presence of
foggy situation. An object laid more than 50 meters
away will be not recognized by the vision system of
the vehicle in our scenario.
4.2.2 Results and Evaluation of Hazardous
Scenario
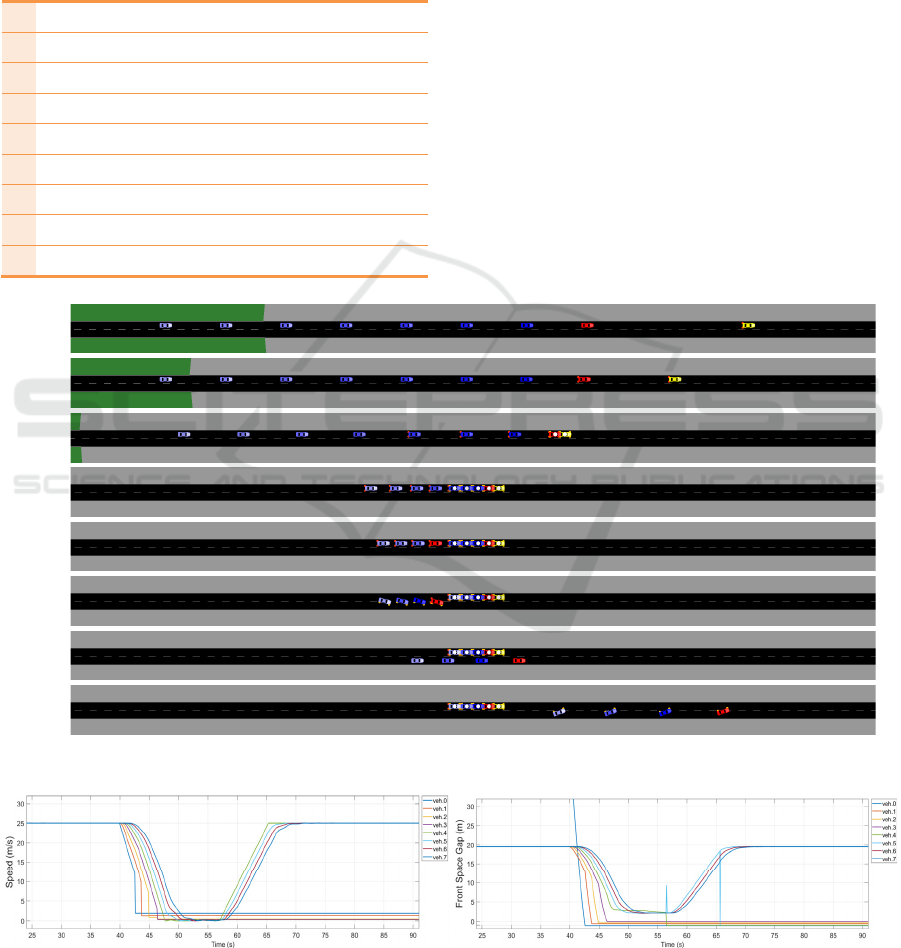
Results: After implementing dense fog in VENTOS,
the results of the simulation are shown in Figure 2.
The explanation of each scene are as follows:
(1) Vision systems without fog recognition do not
identify any vehicle ahead. Until the distance to
the forward vehicle reaches up to 50 m, the
platoon leader continues to drive at a speed of 25
m/s without recognition of the yellow vehicle
that has stopped at the front location.
(2) As the leader vehicle approaches the broken-
down vehicle, the vision system suddenly
recognizes the vehicle and starts to suddenly
brake.
(3) However, due to not enough time to stop safely,
a collision has happened between the platoon
leader and the broken vehicle (Figure 2, marked
by white dots).
(4) Because of this accident, a series of five rear-end
collisions happened. However, the fifth vehicle
in the platoon succeeded in stopping without a
collision.
(5) After series of collisions, the platoon initiates the
platoon splitting maneuver for member vehicles.
The fifth vehicle acquires a roll of new platoon
leader, three following vehicles of the new
leader join the new group.
(6) The new platoon moves to the second lane for
continuous driving.
(7) The new platoon passes by the accident location.
(8) The new platoon returns to the first lane again to
continue platoon driving on the recommended
lane for platoon driving.
Figure 3 shows the analysis results of the above
scenario. The speed graph represents that the platoon
leader encounters the first collision in 42.6 seconds.
The front space gap graph represents zero distance
from the vehicle ahead at that moment. The leader of
the newly formed platoon begins to accelerate again
by changing lanes in 56.6 seconds, as shown in the
scenario of Figure 2 (6).
Evaluation: The dense fog caused a series of five
collisions by continuing to drive at high speeds
without recognition of the object in a dense foggy
area. Therefore, safety mechanisms are needed to
avoid potential collisions in such changeable weather
conditions on roads. In section 4.3, we implement the
safety guards for such kinds of scenarios and show
the avoidance of potential collisions.
4.3 Implementation and Results of Safe
Scenario
4.3.1 Implementation of Safety Guard
We implemented the safety guards for dense foggy
situations. The variable environmental situations such
as dense fog can be recognized by the enhanced
vision systems of the autonomous vehicle. Once the
dense fog is recognized, the safety mechanisms
should be initiated to avoid risks like collisions. We
provide a safety guard Slowdown that decreases the
speed of the leader vehicle to a safe speed. The speed-
ICSOFT 2021 - 16th International Conference on Software Technologies
562
down vehicle can stop at a short distance within
detection coverage of the radar sensor. Additionally,
if dense fog is recognized, a message is sent to the
platoon members via V2V communication in order to
turn on the emergency alert signal.
Algorithm 1 is implemented for the safety guards
in the VENTOS framework.
Algorithm 1: Safety guard for dense foggy situation.
1 if (fogRecognition):
2 fogWarn = true
3 turnOnEmergencyAlertSignal()
4 sendMsg(turnOnEmergencyAlertSignal)
5 setTargetSpeed(15)
6 else:
7 fogWarn = false
8 turnOffEmergencyAlertSignal()
9 setTargetSpeed(25)
The detailed explanations of Algorithm 1 are as
below:
From lines 1 to 5 of Algorithm, line 1 means the
actions that a foggy situation is recognized by the
vision system of the platoon leader. In line 2, it sets
the variable
fogWarn to be true.
In lines 3 and 4, the leader turns on its emergency
alert signals. Then it makes all follower vehicles in
the platoon turning on the emergency alert signals to
warn other vehicles via V2X communication.
In line 5, the platoon leader decelerates its target
speed to 15 m/s (54 km/h). It makes follow vehicles
in the platoon also decelerate accordingly.
The lines from 6 to 9 mean the actions of the
leader after escaping the foggy zone. When the leader
goes out of the foggy zone, it sets the variable
fogWarn back to false, and turns off emergency alert
signals, and returns the target speed to 25 m/s, then
accelerates to the target speed.
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
Figure 2: Simulation Scenes of Hazardous Scenario.
Figure 3: Simulation result of speed (left) and inter-vehicle distance (right) for hazardous scenario.
Safety-based Platoon Driving Simulation with Variable Environmental Conditions
563
4.3.2 Results and Evaluation of Safe
Scenario
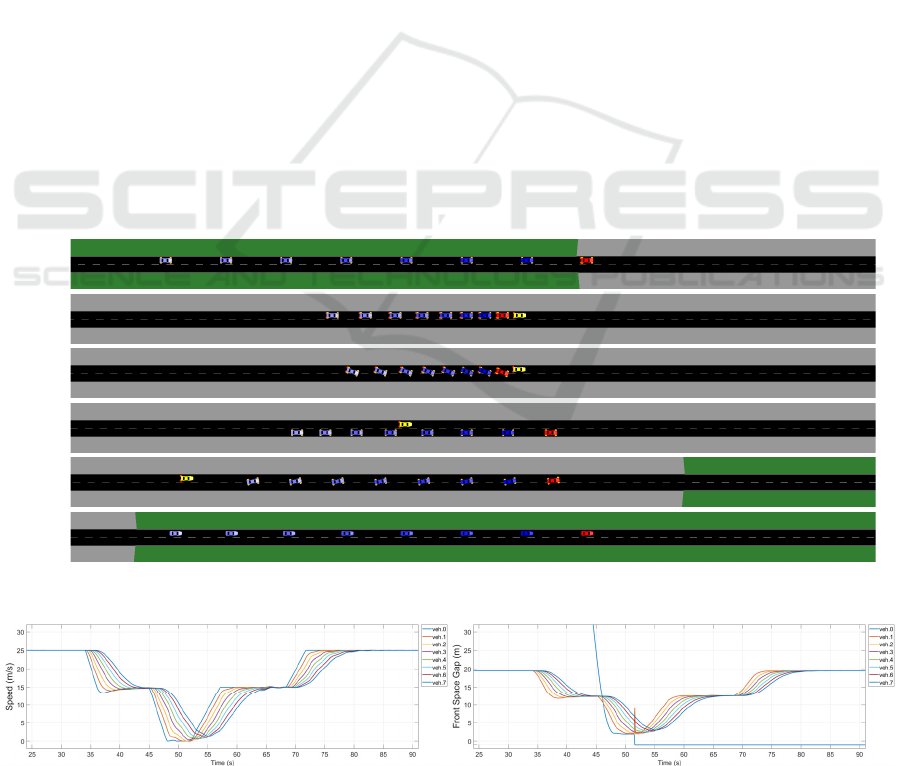
Results: Simulation results with safety guards are
shown in Figure 4. We explain each scene one by one
as follows.
(1) When the vision system of the platoon leader
recognizes the fog, it turns on its emergency
Alert signal and decelerates to a low speed that
can be safely stopped in a short distance.
(2) Despite the sudden appearance of a broken-down
vehicle, the leader vehicle was able to stop safely
with a sufficient distance.
(3) After identifying the surrounding conditions of
the road, the entire platoon changes the lane to
the second one.
(4) The platoon bypasses the broken vehicle.
(5) The platoon returns to the first lane to keep the
platoon driving.
(6) After escaping the dense foggy zone, the platoon
begins to perform normal driving again as shown
in Figure 4 (6).
Figure 5 shows the analysis results of the vehicle
movement in the safe scenario. At the time 34.2
seconds, the platoon leader recognizes that it
encounters a foggy zone and begins to decelerate. The
platoon leader then maintains a low speed of 15 m/s
and then stops safely even if the broken vehicle
appears ahead suddenly. The platoon then changes
lanes in 51.7 seconds by identifying the surrounding
situation. Then the leader vehicle increases the speed
again to 25 m/s after escaping the foggy zone from
68.5 seconds.
Evaluation: The designed safety guards Slowdown
and EmergencyAlertSignalOperation were able to
conduct properly to prevent accidents occurring in
hazardous scenarios (dense fog). Such safety guards
can be used to avoid potential risks in a variable
environment.
5 CONCLUSIONS
In our work, we investigate how to reduce the risks
that may arise due to environmental variability in
platoon driving. For this purpose, we first investigate
environmental variability in platoon driving and
analyze the characteristics of safety guards to reduce
potential hazards. We also utilize VENTOS, an open-
source platoon driving simulator, to simulate diverse
scenarios reflecting environmental variability (e.g.,
fog, snow etc.) and proposed safety guards to avoid
the potential hazards at runtime. The findings in this
(1)
(2)
(3)
(4)
(5)
(6)
Figure 4: Simulation Scene of Safe Scenario.
Figure 5: Simulation result of speed (left) and inter-vehicle distance (right) for safe scenario.
ICSOFT 2021 - 16th International Conference on Software Technologies
564

paper will greatly help to analyze the impact of
environmental variabilities on the safety of
autonomous platoon driving. And it can also support
safety engineers to develop realistic platoon driving
techniques.
In the future, we will conduct a study about the
real-time properties of safety guards. It is very critical
to satisfying the real-time constraints to support
spatial and temporal variabilities as well as
environmental variability in autonomous (platoon)
driving. Thus, we will research and develop time-
constrained safety guards based on simulation
techniques.
ACKNOWLEDGEMENTS
This research was supported by the National Research
Foundation of Korea (NRF) grant funded by the
Korea government (Ministry of Science and ICT).
(NRF-2020R1A2C1007571).
REFERENCES
Bagloee, S. A., Tavana, M., Asadi, M., & Oliver, T. (2016).
Autonomous vehicles: challenges, opportunities, and
future implications for transportation policies. Journal
of modern transportation, 24(4), 284-303.
Kalra, N. (2017). Challenges and approaches to realizing
autonomous vehicle safety. RAND.
ISO 26262 (2nd Edition). (2018). Road vehicles –
Functional Safety. International Organization for
Standardization.
ISO/PAS 21448. (2019). Road vehicles – Safety of the
Intended Functionality. International Organization for
Standardization.
ISO/SAE FDIS 21434. (n.d.). Road Vehicles –
Cybersecurity engineering. International Organization
for Standardization.
Koopman, P., & Wagner, M. (2016). Challenges in
autonomous vehicle testing and validation. SAE
International Journal of Transportation Safety, 4(1),
15-24.
Jia, D., Lu, K., Wang, J., Zhang, X., & Shen, X. (2015). A
survey on platoon-based vehicular cyber-physical
systems. IEEE communications surveys & tutorials,
18(1), 263-284.
Milanés, V., & Shladover, S. E. (2014). Modeling
cooperative and autonomous adaptive cruise control
dynamic responses using experimental data.
Transportation Research Part C: Emerging
Technologies, 48, 285-300.
Xiao, L., Wang, M., & van Arem, B. (2017). Realistic car-
following models for microscopic simulation of adaptive
and cooperative adaptive cruise control vehicles.
Transportation Research Record, 2623(1), 1-9.
Xu, L., Yin, G., & Zhang, H. (2014). Communication
information structures and contents for enhanced safety
of highway vehicle platoons. IEEE Transactions on
vehicular Technology, 63(9), 4206-4220.
Rahman, M. S., & Abdel-Aty, M. (2018). Longitudinal
safety evaluation of connected vehicles’ platooning on
expressways. Accident Analysis & Prevention, 117,
381-391.
Amoozadeh, M., Deng, H., Chuah, C. N., Zhang, H. M., &
Ghosal, D. (2015). Platoon management with
cooperative adaptive cruise control enabled by
VANET. Vehicular communications, 2(2), 110-123.
VENTOS. (n.d.). Vehicular NeTwork Open Simulator.
Retrieved March 21, 2021, from
https://maniam.github.io/VENTOS/
Ali, N., Hussain, M., & Hong, J. E. (2020). Analyzing
Safety of Collaborative Cyber-Physical Systems
Considering Variability. IEEE Access, 8, 162701-
162713.
Wu, M., Zeng, H., Wang, C., & Yu, H. (2017, June). Safety
guard: Runtime enforcement for safety-critical cyber-
physical systems. In 2017 54th ACM/EDAC/IEEE
Design Automation Conference (DAC) (pp. 1-6). IEEE.
Kress-Gazit, H., Wongpiromsarn, T., & Topcu, U. (2011).
Mitigating the state explosion problem of temporal
logic synthesis. IEEE Robotics & Automation
Magazine, 65-74.
Behrisch, M., Bieker, L., Erdmann, J., & Krajzewicz, D.
(2011). SUMO–simulation of urban mobility: an
overview
. In Proceedings of SIMUL 2011, The Third
International Conference on Advances in System
Simulation. ThinkMind.
SUMO. (n.d.). Simulation of Urban MObility. Retrieved
March 21, 2021, from
https://www.eclipse.org/sumo/
Varga, A. (2010). OMNeT++. In Modeling and tools for
network simulation (pp. 35-59). Springer, Berlin,
Heidelberg.
OMNET++. (n.d.). Objective Modular Network Testbed in
C++. Retrieved March 21, 2021, from
https://omnetpp.org/
Fenton, R. E., & Mayhan, R. J. (1991). Automated highway
studies at the Ohio State University-an overview. IEEE
transactions on Vehicular Technology, 40(1), 100-113.
Safety-based Platoon Driving Simulation with Variable Environmental Conditions
565
