
Searching & Generating Discrete-Event Systems
T. J. Helliwell
1
, B. Morgan
2
and M. Mahfouf
1
1
Automatic Control & Systems Engineering Department, University of Sheffield, Sheffield, England
2
Advanced Manufacturing Research Center (AMRC), University of Sheffield, Sheffield, England
Keywords: Generative Models, Discrete-Event Systems, Variable Structures, Event Calculus, Metaprogramming.
Abstract: In this paper we introduce a new method for the automatic generation and computer experimentation of
Discrete-Event Systems (DES). We introduce the concept that DES descriptions may be used to define a
searchable configuration space. Configuration instances in this space a represented as a permutation encoding
which shows the number-of and types-of resources in a given configuration. Each instance is checked that the
number of resources does not exceed a maximum and whether a fixed set of processes (a decomposed goal of
uncertain time intervals drawn from a Gaussian distribution) can be logically completed on the given set of
resources. If the permutation instance satisfies these constraints, it is subsequently constructed as a simulation
model to quantify completion through global features of makespan and total processing time. We claim this
is the basis for a powerful tool in high-level informed design of these types of systems that have hitherto
avoided autonomous description or have been previously individually designed using time consuming
manually defined programs.
1 INTRODUCTION
The fields of engineering and computing have
synergistically supported one another in providing
tools to enhance humanities ability to shape our
world. Various forms of ‘Electronic Design
Automation’ (EDA), including optimisation of
hypotheticals in the broadest sense under the context
of Model Driven Engineering (MDE), have allowed
engineering tasks to be presented in appropriate
mathematical structures to be utilised by computer
programs. As a result of the ability of computers to
inform design decisions, the computer becomes a part
of the engineer’s cognitive process allowing
engineers to sit at a higher level of abstraction –
typically defining the system constraints and goals. It
is inevitable this trend will accelerate, EDA being one
of the most established software disciplines to utilise
design automation. In a broader-still context,
Generative Modelling has emerged as software
process in which a program assists in the design
modelling of a wide range of mediums including
sound, images, animations and products. In this work
we show how Discrete-Event Systems (DES) that can
be generalised as a ‘logical graph structure’ which
defines a constrained space of sub-DES. These
instances can be generated autonomously using a
functional-style programming approach and then
simulated using non-deterministic processing time
intervals to quantify their performance. The program
itself is inspired by the metaprogramming capabilities
of the LISt Processing (LISP) programming language
but written in MATLAB
®
.
DES express phenomena that can only be
described through two distal model-theoretic
viewpoints; on the one hand, by considering their
logical graph structure (a computer-science
theoretical approach, in which analogies to Cellular
Automata (CA), Markov Logic Networks (MLN),
message passing networks, or even representation of
a Chess board, in which places - squares - are
resources) or on the other hand, through statistical
modelling of the dynamic (i.e. time-focused)
evolution of the system, which draws somewhat
predictably from the fields of a simulation, computer
programming and statistics.
The former is related to the state space definition
as a disjoint sum, as opposed to the Cartesian
product, which removes the necessity to declare
variables not required as simply undefined. There
have been little to no attempts to unify or understand
these two aspects of the DES field explicitly in a
coherent framework, despite the fact that they are
inextricably linked – the structure, and discrete-time
Helliwell, T., Morgan, B. and Mahfouf, M.
Searching Generating Discrete-Event Systems.
DOI: 10.5220/0010584302030210
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 203-210
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
203
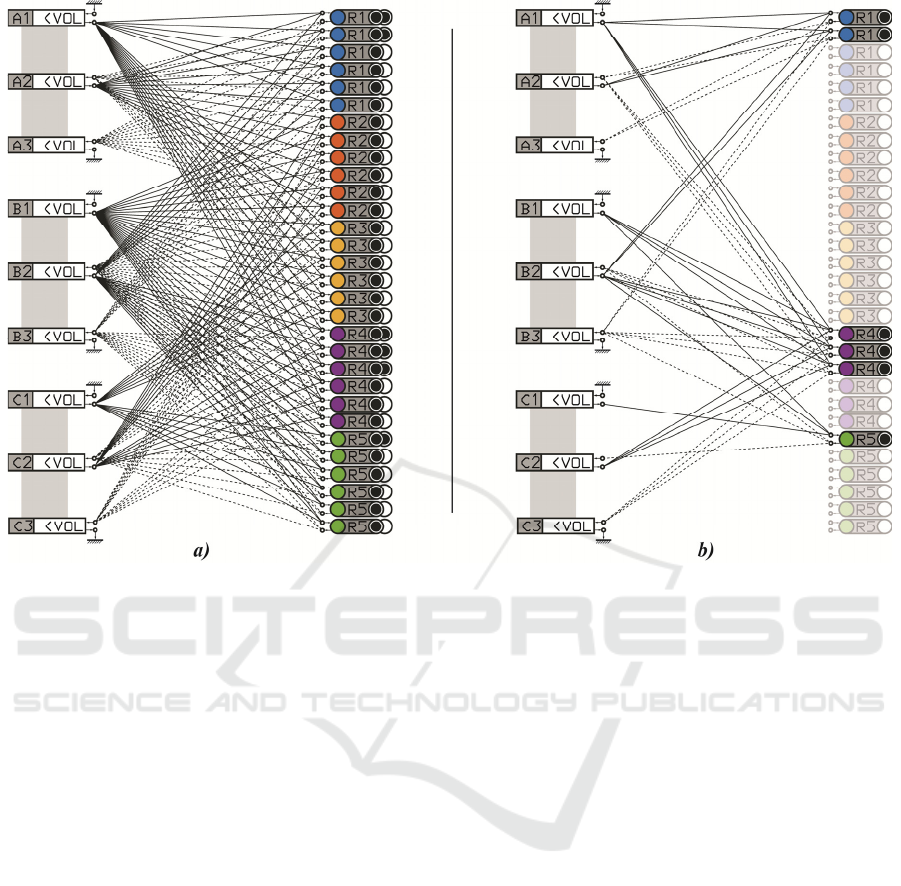
Figure 1: Discrete-Event Systems; in a) we have all possible DES configurations together, which can be seen by the high
number of relations between processes that are queued on the left and their respective resources on the right. In b) we show
the ‘highest performing’ configuration: it logically completes the processing; it satisfies the constraint of a maximum of 6
resources; when it is generated and simulated it is found to be the most performant.
process viewpoint allows us to both consider a
‘space’ of possible structural DES configurations and
subsequently establish how they stand in relation to
one another when actualised through simulation and
statistical uncertainty propagation. As shown in this
paper, statistical information indicates that logical
graph structure has an unequivocally fundamental
and exploitable impact on system dynamics and
consequentially has many applications in many real-
world systems. An accessible approach to enable
computers to explore this configuration space is a
powerful and useful tool in the discrete or
combinatorial optimisation of many highly
commercially valuable systems, allowing supply
chains, logistical systems and manufacturing systems
to be brought into the fold of EDA in a design
perspective, and move towards ideals of Industrie 4.0
in regards to control.
1.1 Previous Work
There is very little previous work to be found though
searching for automatic generation of DES
specifically. However, on a more general level, early
work oriented around modelling theory and how DES
stands in relation to automation and Artificial
Intelligence (AI). As early as 1984, Klir, as part of a
holistic approach to systems modelling architectures,
focused on techniques for inductive System
Identification (SI) of systems with variable structures.
Whereas Zeigler, also in 1984, who coined the
term ‘variable structure model’, was primarily
concerned with capturing this phenomena through
simulation – computer programs. (Uhrmacher &
Arnold, 1994), explored a constructive view of
autonomous agents in which hierarchical,
compositionally organised, internal models that
describe an agent-environment coupling are
fundamentally discrete-event structures, and are
thereby central to progress in AI. The term processors
is seen here also, and uses an analogy of ‘hiring’ and
‘firing’ to indicate processor instantiation under
response to different workloads and development of
strategies to undertake them. (Barros, 1995), and
previously in (Barros, Mendes, & Zeigler, 1994),
introduce the concept of ‘dynamic structure’
computer modelling [presumably inspired by
Variable Structure Modelling in (Zeigler, Kim, &
Lee, 1991) and (Zeigler & Praehofer, 1989) neither of
which are accessible] which extended the original
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
204

Discrete-Event System Specification (DEVS)
formalism that assumes a static structure of the
system with a formalism known as Dynamic
Structure Discrete Event System Specification
(DSDEVS), extending DEVS via a special model
called a network executive. (Uhrmacher, 2001) states
the motivation and necessity for capturing structural
changes via variable structure models originated in
sociological and ecological applications.
Recent formalisation work by (Ay, 2020) defines
characteristics of robustness is in ‘invariance of their
function against the removal of some of their
structural components’. We argue that the advent of
Industrie 4.0 – the information age – decentralised
multi-agent technological systems will begin to
reflect these same properties. It is broadly agreed that
autonomous systems or agents must model
concurrent dynamics in actions, interactions,
composition and robust behaviour that features the
appearance, disappearance and movement of entities.
Most closely to this work, Aspenti & Busi in 1996
(Asperti & Busi, 2009) [appeared as a technical report
in 1996, but later published in 2009] presented Mobile
Petri Nets (MPN) that use join-calculus to support a
change of coupling between nodes; and Dynamic
Petri Nets (DPN) that support additions of new Petri
Net components, both via firing of transitions on a
higher level to create new complete net structures –
new models – in which is thus a DSDEVS.
(Perrica, Fantuzzi, Grassi, & Goldoni, 2010)
discussed in detail requirements surrounding DES
experiments and design of such experiments in
regards to interactions between samples drawn from
probability distributions. Perrica made some
important points about ‘proper configuration’ of
simulation experiments, namely; a great deal of
attention is paid to model development, verification
and validation steps [see (Van Tendeloo &
Vangheluwe, 2019) for a brilliantly clear tutorial
exposition of these steps], whereas comparatively
little attention is paid to what might be summarised as
Design of Experiments (DoE).
Although the generality of DES will affect the
necessity to focus on one aspect or another, for
example; some work primarily use DES formalisms
to address logical graph structures only by omitting
consideration of time as a variable completely, and
instead, only consider ordering or sequencing of
events. In description of a DES, a ‘global’
understanding of state space, state transitions and
output function is required, so we broadly support this
argument, and it is reflective in this work that model
development, verification and validation is not only
time consuming - making a strong argument for its
automation - but also may help to address the need for
more attention (vis-a-vis researcher time) to statistical
analysis by defining the logical graph structure only.
(Cai & Wonham, 2010) consider a top-down
approach by a decomposition of a monolithic
(centralised) for supervisory control in pre-defined
DES systems. Wonham, developer of foundational
work in DES (Ramadge & Wonham, 1989), has
focused primarily on synthesis of supervisory control
as opposed to establishing theory surrounding scalar
comparisons between different DES. That said, the
ability to control DES systems is severely complex
and any statements regarding their overall
performance must be restricted to global feature
summaries using typical initial states and goal states
[as it is here], in the form of a ‘job-shop scheduling’
problem formulation.
(Jiao, Gan, Xiao, & Wonham, 2020), [with prior
work in (Jiao, Gan, Yang, & Wonham, 2016) and
(Macktoobian & Wonham, 2017)] discuss an
approach for reduction in the computational
complexity by grouping together identical processes
and ‘achieve controller reduction by suitable
relabelling of events’ to exploit symmetry inherent to
many DES. In addition to describing a computational
model of DES, in the final part of (Van Tendeloo &
Vangheluwe, 2019)’s work, a queueing system is
considered, and they undertake performance analysis
regarding how the number of resources stands in
relation to the average and maximum queuing times.
In defining a ‘maximum queuing time’, a constraint
is defined, and they discover that 2 resources is the
minimum to satisfy this constraint, whilst it is
speculated that 3
would be quantifiably optimal based
on the future definition of a cost function that trade-
off the waiting of jobs to the cost of adding additional
resources.
2 METHODOLOGY
DES are defined by a discrete state space
representation and asynchronous discrete events. It is
evident that a variable structure model could be
represented in such a way that a static structure is used
to fully enfold all possible variable or dynamic
structural change and associated possible state space
by exploiting either model-based conditionals [See
Fig. 1. a)] or hardcoding intricate conditional
structures as mentioned by (Uhrmacher, 2001).
It is unfeasible for large models, and applications
such as the one outlined in this work, in which the
purpose is to automate the process of model
construction and simulation, to approach the problem
Searching Generating Discrete-Event Systems
205
in this inefficient and less elegant manner. We
consider instead a stochastically searched
configuration space of sub-DES, represented as a
sequence of real-valued integers, called a
permutation, that is constrained by the maximum
total number of resources (in this example, 6) in
which each unique structure is generated [Fig. 1. b)
shows instead how the present treatment illustrates an
instance of a structure]. This is checked first for
logical feasibility in regards to completing the
workload (an exemplar set of processes) and then
simulated (i.e. a trajectory through time or
simulation) with uniformly probable random routing,
inclusion of processing time interval uncertainty, and
asymmetric context (process) switching time
intervals for resources. By defining a DES instance in
a procedural sequence, the workflow is undertaking
an epistemic action, taking the role of the higher-level
‘network executive’. As with (Uhrmacher, 2001), we
have been inspired by Ferber’s concept of
“reflectivity” (Ferber & Carle, 1991), (Ferber, 1999),
defined as “the ability of a computational system to
Table 1: Model Input Data.
Resource
Type
PROCESS TIME INTERVALS
CST – FROM
a
MEAN VAR
A1 A2 B2
R1
A1
100 100 0 4 5
A2
400 150 8 0 9
B2
600 200 10 19 0
RESOURCE TYPE 2 A2 B1 C2
R2
A2
500 100 0 7 4
B1
200 50 4 0 5
C2
300 75 8 12 0
RESOURCE TYPE 3 A1 B1 B1
R3
A1
100 50 0 8 6
B1
250 100 18 0 14
C1
150 25 7 5 0
RESOURCE TYPE 4 A1 B1 B2 C2
R4
A1
70 30 0 12 15 10
B1
300 50 5 0 7 5
B2
550 200 8 5 0 12
C2
350 20 11 14 12 0
RESOURCE TYPE 5 B1 B2 C1
R5
B1
400 50 0 15 10
B2
550 100 4 0 5
C1
125 50 17 8 0
a. Context Switching Time (CST) ‘from’ being the current state or mode.
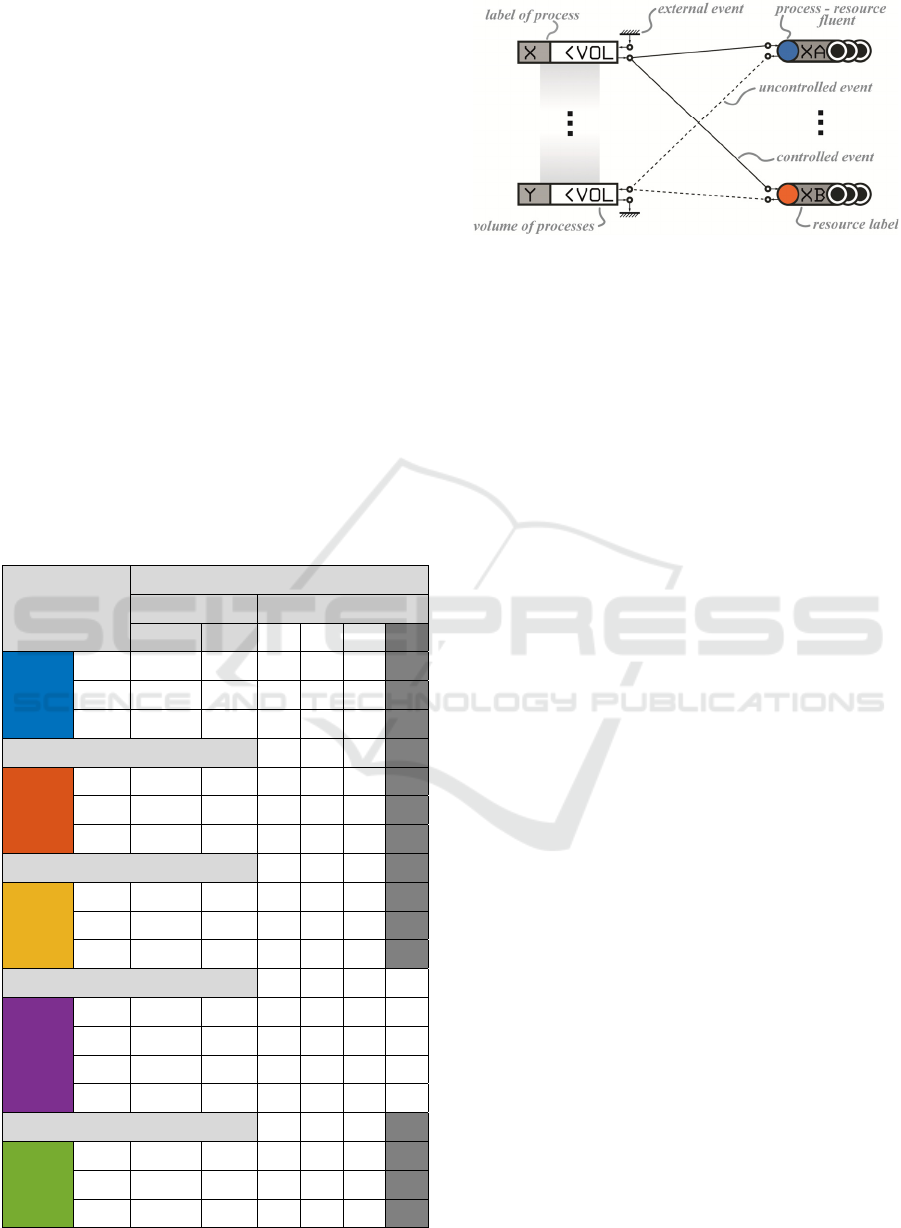
Figure 2: General Layout of a DES in a scheduling format.
represent, control and modify its own behaviour”.
Strictly speaking, this encapsulates many of the
automated tools seen in EDA for MDE (as discussed
in the introduction), but in the context of DES
structures specifically leads to a recursive definition
of models.
Metaprogramming for simulation allows for the
labelling of variables and functions in a manner that
partially avoids the requirement of hardcoding
intricate case structures. Inspired by the LISP
language, the program generates its structure by
selecting the number of instances of each processor
(0 ≤ 6) , then recording the ‘events’ (i.e. state
transitions) as a dynamically generated list of variable
length and content. That list is then used as a typical
mapping that relates events and entities in simulation.
The term Uncertainty Quantification (UQ) is used
in many different contexts to classify those
methodologies that integrate and propagate
uncertainties into mathematical and computer models
where they are used to generate data that is typically
used in forecasting or prediction. Models are
fundamentally limited on account of epistemic
uncertainty regarding a limit on understanding of a
modelled system [and its consequential complexity]
and secondly, on the intractability of complex
models.
2.1 System Architecture
Resources are used by processes over time intervals.
The main thesis is that connections [in this case,
events] between processes and resources are the
fundamental source of structure in defining
possibility. In this context, connections are couplings
of atomic propositions that represent concurrent state
transitions, but could equally be seen as a simple
function - namely - unitary decrement of a process
token from the origin node and increment at the target
node.
Jobs, tasks and processes are similar,
interchangeable concepts and are held in process
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
206
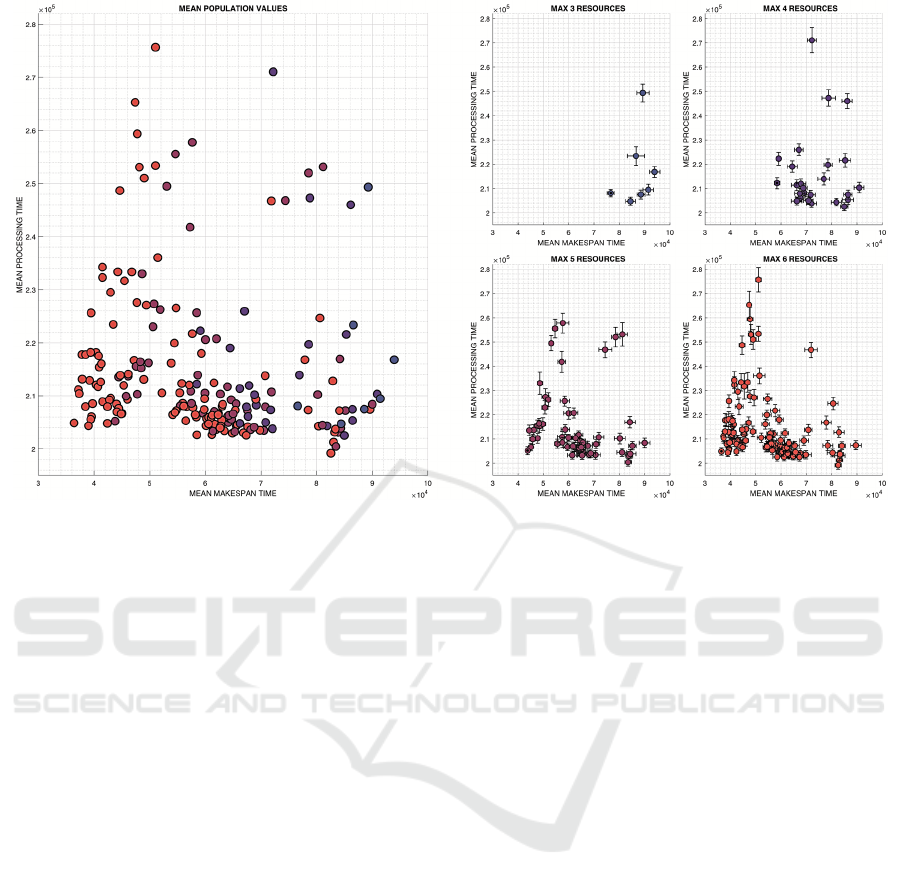
Figure 3: Mean permutation performances data; shown in relation to one another on the left-half; on the right-half, organised
in classes using sub-plots by total number of resources where the error bars show the standard deviation and the dotted
instance is the highest performing configuration of that class.
queue nodes, which are rectangular on the left hand
side of Fig. 2. Identical instances of processes are
held together within one node, categorically labelled
as ‘Process Type’ with a unique encoding and the
number of processes within a node is shown.
Actualisation involves the instantiation of a uniquely
labelled process-resource coupling upon assignment;
an event. External events (perhaps via a supersystem)
can be used to instantiate or inject new process tokens
to their respective process queue, or remove
finished/completed processes. Resources are nodes
on the right hand side which are instantiated as part
of the model construction process. Each has a label or
name indicating its type and index. Nodes of process
and resource types are connected by events of two
types; uncontrolled and controlled, which are dotted
and solid respectively. The possibility of assignment
between processes and resources (and vice-versa) is
dictated by these connections. A lower-level policy
must be used when selecting between (𝑛 1)
possible assignments. Once an assignment is made,
the nondeterministic time interval from a Gaussian
distribution with a specific mean and variance of the
resultant process-resource coupling is generated from
the input data in Table 1.
Depending on the current state or mode of the
resource, the Context Switching Time (CST) which is
asymmetrical and deterministic, [for instance, if a
type R4 resource was in mode C2, and switched to
A1, it takes 10 units of time, whereas in reverse it will
take 11]. Process-resource couplings persist,
addressing the ‘frame’ problem through
circumscription. Requalifying the proposition is
achieved through scheduled firing of uncontrolled
events in future. Because process-resource couplings
(also known as fluents) have the quality of qualitative
reasoning, process models can be described using
natural language, and like language systems, have a
syntax - rules of structure dictated by their
configuration.
2.2 Program Structure & Parameters
Table 1 shows the logical relations between
processes (A1, A2, …, C3) and respective resources
(R1, R2, …, R5). A workload is a set of processes. In
this experiment we only consider one workload;
comprised of 100 A, B and C process tokens each. A1,
A2, A3 are sub-states of the processes – A1 state
would indicate unprocessed, A2, partially processed
and A3 is completed – processed. The performance is
judged on two primary features; the processing time
and makespan. Processing time indicates the literal
amount (scalar sum total) of processing required,
since this relates to important second-order resources,
e.g. energy. The makespan gives a scalar value that is
Searching Generating Discrete-Event Systems
207

indicative of system global performance; the total
processing time of all processes from first process
start to last process finish. Because a given control
policy (e.g. intelligent task sequencing/routing or
load balancing) can vary the local features; process
queue volume and/or associated waiting times, this
consequentially hides global system performance
from evaluation. This phenomena is pervasive in real-
life systems, and it is exceptionally difficult to
perceive, since local control policies are deployed to
avoid bottlenecks at a cost of overall performance (it
can be conceptualised as performance lowering to the
point at which evidence of bottlenecks is removed).
2.3 Results
The system discovered 221 unique configurations
that feasibly process this workload with a maximum
of 6 resources. The logically minimum resource
number is 3, as the workload required 3 different
resource types for completion. Fig. 3. shows the
majority of permutations (outliers were omitted for
clarity) and their respective total number of resources
(as different coloured classes), the respective mean
makespan time and mean processing time [in X-Y
respectively] calculated from a population of 400
simulations. It can be seen that the number of
resources has a significant impact on performance;
and within each class there is also an optimal resource
configuration. It is suggestive in the data that clusters
appear in certain regions, opening the possibility to
discover some heuristic to help inform the selection
of new configurations in larger problems. In Fig. 4.
(upper) the highest performing configurations of each
class are shown with their simulation results.
It is notable that fewer resources show a greater
relation between total processing time and makespan,
as indicated by linear regression fit. In Fig. 4. (lower),
the highest performing configuration is shown once
again, with inclusion of the total Context Switching
Time (CST). Note the highest performing
configuration is visually represented in Fig. 1 b).
3 FUTURE WORK
The routing policy used is likely to be creating
second-order un-modelled effects on simulation,
impacting generated behavior data and performance,
alleviated by; 1) detection using a hybridization of
global and local performance features for evaluation
and/or 2) a more systematic simulation. Using purely
exploratory stochastic search, the discovery of
configurations in larger spaces that are both feasible
Figure 4: Performances – top; best in each class, bottom;
best overall.
and high-performing is unacceptably inefficient
without exploitation. Further development will
feedback high performing features [performance
result(s) of the forward model] from an initial
population to a selection mechanism for
configurations of new populations. An obvious
candidate could be a derivative of the canonical
Genetic Algorithm (GA), via a mixed-integer
encoding, since the permutation itself has no
particular structure. In addition to establishing useful
heuristics to the user about this particular problem, an
interesting avenue of research would be a
metaheuristic algorithm where the generation of new
permutations are limited to features inherent to
clusters of high performing configurations in the
existing population. Software experience limits this
work in regards understanding how variable structure
modelling is manifest in other application contexts.
However, the ability to construct structurally variable
models is growing in applicability to both well
established and contemporary use cases – in systems
that adapt online to variation in requirements. Many
computational workloads involve the fault-tolerant
decomposition, processing and recomposition of
processes or tasks and the allocation of these
subproblems to computer systems that are
increasingly interconnected, hierarchical and
heterogeneous. The internet has enabled macro-scale
workload distribution through cloud computing,
whilst at processing scale, we see a continuous
growth in multi-processor Central Processing Units
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
208

(CPU), a growth in the use of Graphical Processing
Units (GPU), and new specialised systems, such as
the Intelligence Processing Unit (IPU)(Mohan et al.,
2020)(Jia, Tillman, Maggioni, & Scarpazza,
2019)(Ortiz, Pupilli, Leutenegger, & Davison, 2020)
and Tensor Processing Unit (TPU) (Jouppi, Young,
Patil, & Patterson, 2018). The advent of Industrie 4.0
demands that these systems can adaptively self-
organise so that large workloads are distributed
between specialised resources in real time.
The design or operational control manufacturing
systems is an obvious candidate, and was anticipated
by (Uhrmacher, 2001); “in factories where machines
are capable of being dynamically reconfigured for
different products”. Typically in the design and
control of manufacturing systems, the time interval
distribution of jobs, the types of resources unto which
the jobs can be executed, how they are sequenced and
context switching in the form of tool changeovers are
all known or estimated. In which case a project is to
establish a globally optimal manufacturing system
design based on exemplar workloads which satisfies
the demands of the supply chain. It appears that DES
models or structures undertake a form of automatic
reification in order to provide a closed domain of
discourse a la constructivism. Machine Learning
(ML) and metamodeling has approaches for
modelling that encapsulates different structures
numerically, removing the requirement to create or
omit entities. Most evident is the property of linear
separability in classical Perceptrons and ‘dropout’ in
contemporary Neural Networks (NN) in which
variables between layers are contextually
disconnected by reaching zero weight. This suggests
generality is a property of models that in some way
manifest reconfigurablity.
ACKNOWLEDGEMENTS
The authors would like to acknowledge Finneran, S.
in his early observations regarding the value of
automatic generation of Discrete-Event System
models in the manufacturing industry.
REFERENCES
Uhrmacher, A.M. and Arnold, R. (1994). Distributing and
maintaining knowledge: Agents in variable structure
environments. Proceedings of the 5th Annual
Conference on AI, Simulation, and Planning in High
Autonomy Systems: Distributed Interactive Simulation
Environments, AIHAS 1994, pp. 178–184.
Barros, F.J. (1995). Dynamic Structure Discrete Event
System Specification: A New Formalism for Dynamic
Structure Modelling & Simulation. Proc. 1995 Winter
Simul. Conf. ed. C.
Barros, F.J., Mendes, M.T. and Zeigler, B.P. (1994).
Variable DEVS - Variable Structure Modelling
Formalism An Adaptive Computer Architecture
Application. Fifth Annu. Conf. AI Plan. High Auton.
Syst.
Zeigler, B.P., Kim, T.G. and Lee, C. (1991). Variable
structure modelling methodology: an adaptive
computer architecture example. Trans. Soc. Comput.
Simul. Int., vol. 7, no. 4, pp. 291–319.
Zeigler, B.P., and Praehofer, H. (1989). Systems Theory
Challenges in the Simulation of Variable Structure and
Intelligent Systems. CAST Comput. Syst. Theory, pp.
41–51.
Uhrmacher, A.M. (2001). Dynamic Structures in Modeling
and Simulation: A Reflective Approach. ACM Trans.
Model. Comput. Simul., vol. 11, no. 2, pp. 206–232.
Ay, N. (2020). Ingredients for robustness. Theory Biosci.,
vol. 139, no. 4, pp. 309–318.
Asperti, A. and Busi, N. (2009). Mobile Petri nets. Math.
Struct. Comput. Sci., vol. 19, no. 6, pp. 1265–1278,
Perrica, G., Fantuzzi, C., Grassi, A. and Goldoni, G. (2010).
Automatic experiments design for discrete event
system simulation. Proc. - 2nd Int. Conf. Adv. Syst.
Simulation, SIMUL 2010, pp. 7–10.
Tendeloo, Y and Vangheluwe, H. (2019). Discrete event
system specification modeling and simulation. Proc. -
Winter Simul. Conf., vol. 2018-Decem, pp. 162–176.
Cai, K. and Wonham, W.M. (2010). Supervisor
localization: A top-down approach to distributed
control of discrete-event systems. IEEE Trans.
Automat. Contr., vol. 55, no. 3, pp. 605–618.
Ramadge, P.J.G. and Wonham, W.M. (1989). The control
of discrete event systems. Proceedings of the IEEE, vol.
77, no. 1. pp. 81–98.
Jiao, T., Gan, Y., Xiao, G. and Wonham, W.M. (2020).
Exploiting Symmetry of Discrete-Event Systems by
Relabeling and Reconfiguration. IEEE Trans. Syst.
Man, Cybern. Syst., vol. 50, no. 6, pp. 2056–2067.
Jiao, T., Gan, Y., Yang, X. and Wonham, W.M. (2016).
Exploiting symmetry of discrete-event systems with
parallel components by relabeling. IEEE Reg. 10 Annu.
Int. Conf. Proceedings/TENCON, vol. 2016-Janua, pp.
0–3.
Macktoobian, M. and Wonham, W.M. (2017). Automatic
reconfiguration of untimed discrete-event systems.
2017 14th Int. Conf. Electr. Eng. Comput. Sci. Autom.
Control. CCE 2017.
Ferber, J. and Carle, P. (1991). Actors and agents as
reflective concurrent objects: A Mering IV perspective.
IEEE Trans. Syst. Man Cybern., vol. 21, no. 6, pp.
1420–1436.
Ferber, J. (1999). Multi-Agent Systems: An Introduction to
Distributed Artificial Intelligence.
Mohan, L.R.M. et al. (2020). Studying the potential of
Graphcore IPUs for applications in Particle Physics.
Jia, Z., Tillman, B., Maggioni, M. and Scarpazza, D.P.
Searching Generating Discrete-Event Systems
209

(2019). Dissecting the graphcore IPU architecture via
microbenchmarking. https://arxiv.org/abs/1912.03413.
Ortiz, J., Pupilli, M., Leutenegger, S. and Davison, A.J.
(2020). Bundle Adjustment on a Graph Processor.
Proc. IEEE Comput. Soc. Conf. Comput. Vis. Pattern
Recognit., pp. 2413–2422.
Jouppi, N., Young, C., Patil, N. and Patterson, D. (2018).
Motivation for and Evaluation of the First Tensor
Processing Unit. IEEE Micro, vol. 38, no. 3, pp. 10–19.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
210
