
Smart Techniques for Flying-probe Testing
Andrea Calabrese
a
, Stefano Quer
b
and Giovanni Squillero
c
DAUIN, Department of Control and Computer Engineering, Politecnico di Torino, Turin, Italy
Keywords:
Algorithms, Algorithm Design and Analysis, Testing, Graph Theory, Parallel Architectures.
Abstract:
In the production of printed circuit boards, in-circuit tests verify whether the electric and electronic com-
ponents of the board have been correctly soldered. When the test is performed using flying-probes, several
probes are simultaneously moved on the board to reach and touch multiple test points. Taking into consid-
eration the layout of the board, the characteristics of the tester, and several other physical constraints, not all
movements of the probes are mutually compatible nor they can always be performed through simple straight
lines. As the cost of the test is mainly related to its length, and patching the path of one probe may create
new incompatibilities with the trajectory of the other probes, one should carefully trade off the time required
to find the trajectories with the time required by the probes to follow them. In this paper, we model the move-
ments of our flying probes as a multiple and collaborative planning problem. We describe an approach for
detecting invalid movements and we design a strategy to correct them with the addition of new intermediate
points in the trajectory. We report the entire high-level procedure and we explore the optimizations performed
in the more expensive and complex steps. We also present parallel implementations of our algorithms, either
relying on multi-core CPU devices or many-cores GPU platforms, when these units may be useful to achieve
greater speedups. Experimental results show the effectiveness of the proposed solution in terms of elapsed
computation times.
1 INTRODUCTION
Printed Circuit Boards (PCBs) require several expen-
sive testing phases to get rid of all possible fabrication
faults (Coombs, 2016; Radev and Shirvaikar, 2006;
van Schaaijk et al., 2018). Among these, the final test
step usually concentrates on the defects due to sol-
dering problems occurred during assembly. With the
bed-of-nails strategy, each test point is reached by a
specific needle and tests can be performed in paral-
lel. On the contrary, when testing is performed using
flying-probes (Soh Ying Seah et al., 2009; Hiratsuka
et al., 2010), a limited number of probes quickly move
on the board contacting sets of test points to apply the
required electrical signal and to observe the response.
In recent years, flying-probe testers have improved
the speed and the accuracy of their movements, and
are now commonly used for large boards, with a high
number of probes and test sets. To support this trend
significant investments have been made by the tester
companies, in terms of both hardware and software.
a
https://orcid.org/0000-0002-8854-8171
b
https://orcid.org/0000-0001-6835-8277
c
https://orcid.org/0000-0001-5784-6435
In this paper, we analyze a very specific and com-
plex motion planning problem that frequently arise
in this context. Once the test sequence has been de-
signed and the test phase is running, unpredictably,
some of the required displacements may be discov-
ered not to be physically feasible, and must be recom-
puted as quickly as possible without interfering too
much with the ongoing test process.
More formally, the test of a PCB with flying
probes can be described as a sequence of steps s
i
=
(p
i
,t
i
). In each step, first the probes are positioned
to contact the required test points p
i
; then, the actual
tests t
i
are performed applying stimuli and checking
results. An optimizer is often used to arrange the steps
in an optimal order, i.e., {s
0
, s
1
, . . . , s
i
, . . . , s
n
}, such
that the global test time is minimized (Bonaria et al.,
2019b). As to logically move from step s
i
to step s
i+1
,
probes have to be physically relocated from position
p
i
to position p
i+1
, if one of these movements is un-
feasible, then step s
i+1
is invalid.
Generally speaking, there are different possible
reasons which make a probe movement invalid. First
of all, probes are moved singularly but concurrently
and straight movements may be unfeasible due to the
different speed, acceleration, and deceleration along
Calabrese, A., Quer, S. and Squillero, G.
Smart Techniques for Flying-probe Testing.
DOI: 10.5220/0010582302850293
In Proceedings of the 16th International Conference on Software Technologies (ICSOFT 2021), pages 285-293
ISBN: 978-989-758-523-4
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
285

the axes. Moreover, the movement of one probe may
cross a very tall component, i.e., a “no-fly” zone.
Furthermore, a path can violate other physical con-
straints, as probes should not collide and they can-
not change their relative position along the x-axis.
These situations can arise because the optimizer has
not been able to find a better schedule for all the tests
or simply because it did not foresee, or care about,
low-level details (i.e., the actual trajectories) of the
planning process. In addition, when performing the
test, a movement may be invalid because of the ac-
tual positioning of the board on the conveyance sys-
tem, and such eventuality cannot be foreseen. Finally,
there are cases in which the test engineer may manu-
ally ask for a specific test to be performed, i.e., added,
at run-time.
To reduce the above problems, we propose an ap-
proach to detect invalid movements due to path inter-
section and we correct the trajectories on-the-fly. In
our approach, when a problem is detected, a heuristic
strategy adds new steps to the plan. In other words,
independently from the reasons that make the step
s
i+1
illegal, we add extra steps
b
s
j
to the overall probe
path, to make the whole sequence valid again, i.e.,
{s
i
,
b
s
0
, . . . ,
b
s
n
, s
i+1
}. The additional steps
b
s
j
do not
specify any tests, but provide a legal trajectory for the
probes, i.e.,
b
s
j
= (
b
p
j
, ∅). Each new step, implies a
new set of probe movements which we define to be
safe and collision free. Determining the additional
steps is complex and the process may iterate, lead-
ing to a solution in which new movements are added
over and over again to make previous steps valid.
As the cost of the test is mainly related to its time
length, the time necessary to locate additional points
should be carefully traded-off with the time required
to follow the new path. Furthermore, as modern test
devices have up to 8 probes, we coordinate their con-
current movements and we recur to a parallel imple-
mentation of our techniques to be as fast as possi-
ble. We show, that our algorithms can exploit parallel
multi-core devices (CPUs) and many-core modern ar-
chitecture (GPUs). Experimental results show up-to
a 10x speedup factor using our parallel CPU-based
and up-to a 70x speedup factor using our many-core
GPU-based application.
The paper is organized as follows. Section 2 re-
ports some considerations on related works and Sec-
tion 3 formally describes our testing environment. Af-
ter that, Section 4 illustrates our methodology and
Section 5 includes our experimental evidence. Fi-
nally, Section 6 concludes the paper with few sum-
marizing remarks and some hints on future works.
2 RELATED WORKS
Components that are soldered during the assembly
phase, to hold their correct position, can suffer from
defects, and PCBs need to be thoroughly tested. Un-
fortunately, PCBs are becoming extremely complex
and many boards have significantly more components
and solder joints today than just a few years ago.
Many research papers on board-assembly testing fo-
cus on boundary scan test, processor-controlled test,
or other powered digital testing techniques. These
works mostly ignore that circuits can incur damage
that could have been avoided by executing a non-
powered test first.
(Radev and Shirvaikar, 2006) investigate the pos-
sibility of enhancing a flying probe tester with an au-
tomated optical inspection module. Following face
recognition strategies, the authors first perform train-
ing using several images of the PCB. Then, to achieve
a wide range of defect detection and decrease inspec-
tion times, they verify their method with different
level of noise, occlusion, position shift, rotation, and
lighting variation.
(Soh Ying Seah et al., 2009) combine two test
platforms, namely flying-probe in-circuit test and
load board verification on an automatic test equip-
ment.
(Hiratsuka et al., 2010) present an early work on
an in-circuit testers with two flying probes. The au-
thors apply an extension of the Traveling Salesman
Problem algorithm formulated as an integer linear
programming problem to minimize the total time of
the inspection.
(van Schaaijk et al., 2018) describe a software tool
that automatically generates in-circuit tests based on
the product design files, without requiring probe ac-
cess on every net. The software also indicates in
which parts of the board the fault coverage is not max-
imal, and hence where extra probe access will im-
prove the test quality.
(Bonaria et al., 2019a) detail a technique to op-
timize the flying probes positioning in a SPEA 4080
test equipment. In order to minimize the test time, the
authors concentrate on re-arranging the sequence of
tests, considering the tester capabilities, the board lay-
out, and several constraints coming from the environ-
ment and the customer. The authors finally compare
the new algorithm with the old one, i.e., the FP2012,
whose performances were sub-optimal with a high
number of test blocks and test points.
(Jurj et al., 2020) design a hybrid sensor-less tester
by combining the features of flying probe testing
and the capabilities of a coordinate measuring ma-
chine. The experimental results show that the pro-
ICSOFT 2021 - 16th International Conference on Software Technologies
286
posed tester is suitable for smaller sized PCBs on
which it is efficient in terms of precision, test time,
power consumption, and costs.
(Li et al., 2020) present a novel planning method
for flying probes based on computing the Manhattan
distance among test points. The authors first cover
all possible test points using a convex polygon path.
Then, they insert all remaining points to the polygon
trying to minimize the length of the added subpaths.
3 TESTING ENVIRONMENT
The testing device targeted in this work is a typical
high-end tester. It has 4 arms on each side of the
board, above and below the board. Each arm car-
ries a test probe. In a first approximation, each arm
moves in a three-dimensional Euclidean space along
the three dimensions, namely, (x, y, z). Probes usually
have different speed on the thee axis. Movements on
the x axis are generally faster, and movements on the
z axis, slower. The following rules apply:
• Movements on the z axis (vertical axis) are always
applied to all probes concurrently.
• Movements on x and y axis are independent but
probes cannot change their order along the x axis.
For instance, the leftmost probe will always be
the leftmost probe. Since probes have an or-
der, we can label them from left to right on the
two sides of the board as (t
0
,t
1
,t
2
,t
3
) for top and
(b
0
, b
1
, b
2
, b
3
) for bottom.
• Theoretically, movements on the x-y plane are
straight lines. Practically, the motors on the
two axes might not be synchronized and the real
movement could be a curve. The worst case sce-
nario for a movement is a rectangle, which models
the uncertainty of the equipment to move probes
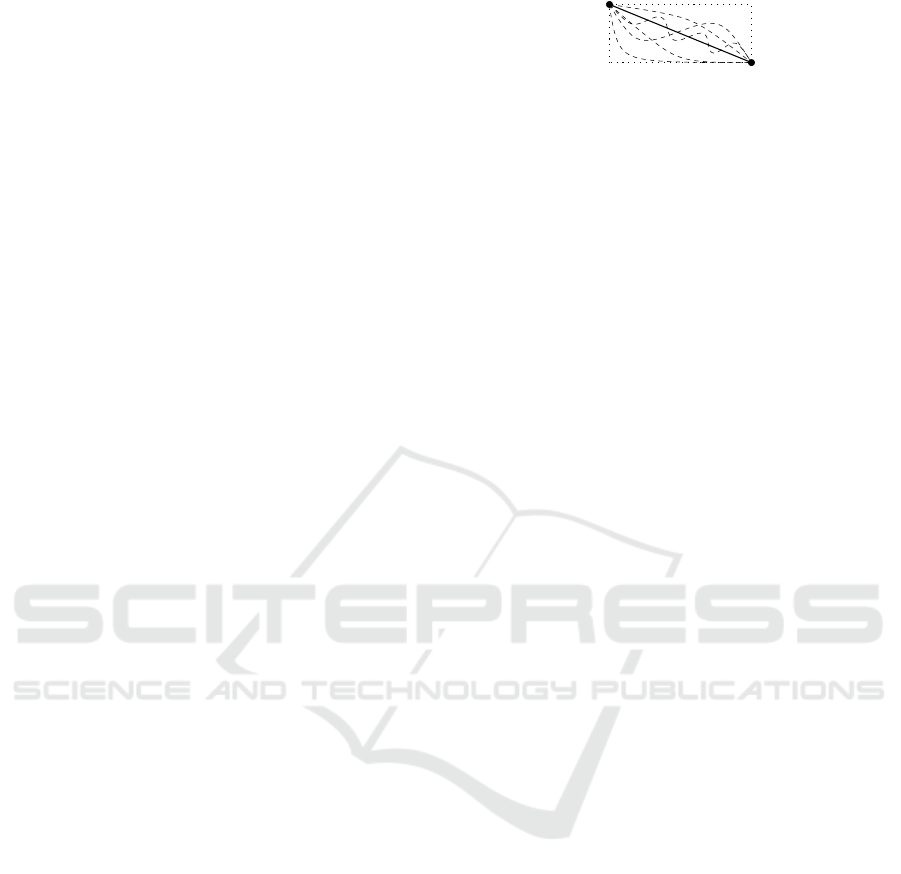
from a point to another. Figure 1 reports an exam-
ple of such uncertainty. The straight path (contin-
uous line) from the source (p
i
) to the destination
(p
i+1
) positions can degenerate into all paths (dot-
ted lines) included within a path occupation rect-
angle whose p
i
and p
i+1
are the opposite corners.
A board may contain no-fly zones, that is, areas
that probes can not fly over. An obvious consider-
ation is that no-fly zones cannot contain test points.
We say that two points are incompatible if the straight
line, possibly degenerated, leading from one to the
other intersects a no-fly zone. As probes mounted
on one side do not interfere with probes mounted on
the other side, in the following, we will only consider
the 4 probes on one side, without specifying top (t)
p
i+1
i
p
Figure 1: A single probe movements from the source p
i
to
the destination p
i+1
position. The theoretical straight seg-
ment can degenerate into all possible paths within a path
occupation rectangle defined as having p
i
and p
i+1
as op-
posite corners.
or bottom (b). All procedures, described in the pa-
per, will be applied on both sides of the PCB. We de-
fine a probe configuration C
i
as a list of points having
p = (p
x
i
, p
y
i
) coordinates, where each point represents
the position of the corresponding probe, according to
its labeling:
C
i
=
(p
x
i
0
, p
y
i
0
), (p
x
i
1
, p
y
i
1
), (p
x
i
2
, p
y
i
2
), (p
x
i
3
, p
y
i
3
)
(1)
A valid probe configuration C
i
is a configuration
where for each pair of probes α and β, such that α < β
we have that p
x
i
α
≤ p
x
i
β
, and no probe is inside a no-fly
zone.
4 PROPOSED ALGORITHM
A trajectory is a sequence of valid probe configura-
tions, that is, T = (C
0
, C
1
, . . . , C
n
). The base algorithm
for moving probes, i.e., the one to execute step s
i+1
after in step s
i
is shown in Algorithm 1.
PERFORMSTEP(s
i
, s
i+1
)
1: Z ← { all no-fly zones on the board }
2: T ← (p
i
, p
i+1
)
3: while not VALID(T, Z) do
4: j ← SELECTPROBE(T,Z)
5: T ← UPDATEPROBE(T, j, p
i
j
, p
(i+1)
j
, Z)
6: end while
7: MOVEPROBES(T )
Algorithm 1: Find an optimal trajectory to perform step
s
i+1
after step s
i
.
First, the set of all no-fly zones is stored in Z (line
1). Then, a initial trajectory T from the current po-
sition p
i
(in s
i
) to the new positions p
i+1
(in s
i+1
)
is built following a straight line (line 2). If T is in-
valid due to the collision between a probe and a no-
fly zone (line 3), the trajectory is updated iteratively.
The core idea is to select probes with invalid move-
ments and to patch them. Then, in each iteration of
the while loop, the function SELECTPROBE (line 4)
selects a probe (namely, probe j) that is about to per-
form an invalid movement. After that, the function
UPDATEPROBE evaluates an effective trajectory that
Smart Techniques for Flying-probe Testing
287
brings flying probe j from test point p
i
to test point
p
i+1
avoiding the no-fly zones specified in Z. When
the selection process is terminated probes are actually
moved (line 7).
UPDATEPROBE(T, j, p
i
, p
i+1
, Z)
1: P ← {p
i
, p
i+1
}
2: S ← ∅
3: n ← 0
4: while S = ∅ do
5: n ← n + 1
6: P ← P ∪ EXTRAPOINTS(p
i
, p
i+1
, n)
7: G ← BUILDGRAPH(P, Z)
8: S ← SHORTESTPATH(p
i
, p
i+1
, G)
9: end while
10: T ← ADDSTATES( j, T, S)
11: return T
Algorithm 2: Update the trajectory T to get a valid
move-ment from test point p
i
to test point p
i+1
.
The function UPDATEPROBE is detailed in Al-
gorithm 2. This function builds and verifies paths
of increasing complexity, until a valid one if even-
tually found. The set P contains a subset of the test
points on the board, initially only the source p
i
and
the destination p
i+1
of the movement. The func-
tion EXTRAPOINTS returns the set of new points that
should be considered for finding the path. The func-
tion works in steps, stored in parameter n. At first, it
adds few points, then it broaden the space, and finally
it returns a set of points that include the corners of the
board. Notice that, the procedure UPDATEPROBE is
guaranteed to terminate successfully exactly because,
as a last resort, procedure EXTRAPOINTS returns a
set of safe points in the corners of the board, allowing
the application to always find a valid, yet long path.
The function BUILDGRAPH returns the weighted,
undirected, and incomplete graph G = (P, E, w). The
vertices P of G are the set of test points P that should
be considered for defining the trajectory. The edges
E represent all possible segments connecting two test
points in P, excluding the ones crossing a no-flight
zone. The weights w represent the time to move from
one vertex to the other, and they are computed adopt-
ing a non-linear function that considers the length of
the movement along the two axes and the speed, ac-
celeration, and deceleration of the probes in these di-
rections. The function SHORTESTPATH returns the
shortest path from p
i
to p
i+1
in the graph G; if p
i
and
p
i
are not connected, it returns an empty path. Once
a valid path S has been found, function ADDSTATES
embeds the path S into the trajectory T and returns
it. The function makes sure that the trajectory will be
composed of a sequence of valid configurations.
4.1 Procedure EXTRAPOINTS
The function EXTRAPOINTS adds vertices to the
graph on which the shortest path between p
i
and p
i+1
will be eventually calculated. While considering a
large number of points would lead to a very effec-
tive trajectory, the size of the graph directly influences
the computational effort. Therefore, we try to add the
minimal number of points that could quickly make the
problem feasible.
The function may be called more times with the
same source p
i
and destination p
i+1
, and over the sub-
sequent invocations it shall return a larger number of
points, thus increasing the probability to find a solu-
tion, but also slowing down the search. One of its
parameters, n, records how many attempts have al-
ready been done, and therefore it controls the amount
of points returned.
The vast majority of the invalid trajectories could
be summarized in just few cases. In Figure 2a the seg-
ment p
i
p
i+1
does not intersects directly a no-fly zone,
but the movement is still invalid. Figure 2b shows a
case in which the segment intersects a no-fly zone and
a valid trajectory may be found without changing the
movement on the x axis. In Figure 2c the segment in-
tersects a no-fly zone but finding a valid trajectory re-
quire to change the movements on both axes. Finally,
Figure 2d shows a case in which whatever change is
done to correct the movement, the new trajectory is
invalidated by a different no-fly zone.
(a)
p
i+1
p
i+1
p
i
p
i
(b)
p
i+1
p
i
p
i+1
p
i
(c)
p
i
p
i+1
p
i
p
i+1
(d)
p
i
p
i
p
i+1
p
i+1
Figure 2: Possible collisions between a probe trajectory and
a no-fly zones.
While it is easy to recognize the first case, it is not
possible to quickly discriminate between the last three
situations. However, the case (d) is significantly less
ICSOFT 2021 - 16th International Conference on Software Technologies
288

probable than the cases (b) and (c).
EXTRAPOINTS ( p
i
, p
i+1
, n)
1: T ← ∅
2: if (n ≥ 3) then
3: return {set of safe points}
4: else if (no intersection with no-fly zones) then
5: return { 1 + 2(n − 1) points of p
i
p
i+1
}
6: else if (n = 1) then
7: Z ← intersecting no-fly zones
8: return EDGES(Z)
9: else if (n = 2) then
10: Z ← all nearby no-fly zones
11: return EDGES(Z)
12: end if
Algorithm 3: Update the trajectory T to get a valid
movement from position p
i
to p
i+1
.
The function EXTRAPOINTS, reported in Algo-
rithm 3, first checks if the segment does not directly
intersect a no-fly zone (line 4). In this case, the trajec-
tory can be made valid by simply breaking down the
movement into different segments. In this case, the
function return a 1 + 2(n − 1) points equally spaced
over the segment as in Figure 2a. When the segment
p
i
p
i+1
intersect at least a no-fly zone and n = 1, the
algorithm returns points around the edges of the rele-
vant no-fly zone, hoping that the next algorithm will
be able to find a trajectory that circumnavigates it (see
Figures 2b and 2c). When the segment p
i
p
i+1
inter-
sect at least a no-fly zone and n = 2, the algorithm
returns the points around the edges of all no-fly zones
inside a certain radius of the segment, allowing to find
solutions for intricate cases like the one of Figure 2d.
Finally, when the function is invoked with n = 3, it re-
turns a pre-defined set of safe points that will enable
finding a valid, non-optimal trajectory.
4.2 Procedure BUILDGRAPH
The function BUILDGRAPH builds the graph that
will be used for finding the shortest path consider-
ing only the points in P. It is a simple procedure that
can greatly benefit from parallelism (please, see Sec-
tion 4.4). The resulting graph is undirected, weighted
with the time required to perform the actual move-
ments, and not complete as some edges may refer to
invalid movement considering the no-fly zone Z.
4.3 Procedure SHORTESTPATH
The function SHORTESTPATH finds the shortest path
from the source p
i
to the destination p
i+1
in the
weighted graph G. It adopts a modified version of the
celebrated Dijkstra single-source shortest-path algo-
rithm (Dijkstra et al., 1959). The search is interrupted
as soon as the destination p
i+1
is reached.
While the algorithm is exact, the general result
may not be optimal because some relevant points
might not appear in the graph.
4.4 Collision Detection
In different parts of the previous algorithms, for in-
stance when we check if the step s
i+1
is valid after the
step s
i
, or when we build the graph G, it is necessary
to verify whether the movement cross a no-fly zone.
Then, in general, we need to check whether a segment
p
i
p
i+1
intersects any no-fly zones included in Z. To
detect a collision with a no-fly area we check for line
intersection. No-fly zones are modeled as rectangles.
Since we know that test points cannot reside inside
or alongside the perimeter of a no-fly zone, we test
the collision against the diagonals of the rectangle. In
this way, we verify the collision against 2 different
segments instead of 4.
p
i+1
p
i
Figure 3: Collision detection: A segment and a non critical
no-fly zone represented as a shaded area.
This process is illustrated in Figure 3 and it is
detailed by the pseudo-code in Algorithm 4. Proce-
dure SEGMENTCOLLISIONDETECTION looks for in-
tersection between two segments s
1
e
1
and s
2
e
2
. Let
L
x
1
and L
y
1
(L
x
2
and L
y
2
) be the length of the first (sec-
ond) segment on the x and y axes, respectively. The
value of d, computed in line 3, is used to detect
whether the segments are parallel or not (line 4). If
they are parallel, they simply do not touch (line 5).
If the segments are not parallel, we find the x and y
coordinates of the collision. Since we are interested
in segments instead of lines, even if the segments are
not parallel they might not collide. The part with the
checks ensures this is respected by calculating the ra-
tio of the distance between the collision point over
the one using the extremes. If this ratio is not be-
tween 1 and 0, this means that the segments do not
collide; otherwise, they do collide. In the final result,
we are not interested in the collision point, so a simple
Boolean value is returned as result of the check.
When no collision is detected, the actual distance
is calculated. The distance is not a topological dis-
tance, but rather a measure of the time required to
perform the movement. As the probes have different
speeds and distinct accelerations on the different axis,
a function may be required, but its computation does
Smart Techniques for Flying-probe Testing
289

SEGMENTCOLLISIONDETECTION(s
1
e
1
, s
2
e
2
)
1: c
1
← L
y
1
· s
x
1
+ L
x
1
s
y
1
2: c
2
← L
y
2
· s
x
2
+ L
x
2
s
y
2
3: d ← L
y
1
· L
x
2
− L
y
2
· L
x
1
4: if (d = 0) then
5: return FALSE
6: end if
7: x ←
L
x
2
·c
1
−L
x
1
·c
2
d
8: y ←
L
y
1
·c
2
−L
y
2
·c
1
d
9: if (e
x
1
6= s
x
1
) then
10: r ←
x−s
x
1
−L
x
1
11: v
0
← (r ≥ 0 and r ≤ 1) ? TRUE : FALSE
12: end if
13: if (e
y
1
6= s
y
1
) then
14: r ←
y−s
y
1
L
y
1
15: v
1
← (r ≥ 0 and r ≤ 1) ? TRUE : FALSE
16: end if
17: if (e
x
2
6= s
x
2
) then
18: r ←
x−s
x
2
−L
x
2
19: v
2
← (r ≥ 0 and r ≤ 1) ? TRUE : FALSE
20: end if
21: if (e
y
2
6= s
y
2
) then
22: r ←
y−s
y
2
L
y
2
23: v
3
← (r ≥ 0 and r ≤ 1) ? TRUE : FALSE
24: end if
25: return (v
0
or v
1
) and (v
2
or v
3
)
Algorithm 4: Segment to segment collision detection.
not presents any particular complexity and we do not
describe it in here for the sake of space.
Since the computations required by the collision
detection and the distance computation steps have
very few branching paths, they can take full advan-
tage in being implemented on GPUs. The CPU en-
sures, through frequent synchronization, that the GPU
threads calculate collisions between all the points and
one no-fly zone at the time. This simplifies the wrap-
per function, yet it offloads the weight of a for loop
from the GPU, which has a higher impact than on the
CPU because of the lack of a branch prediction unit.
5 EXPERIMENTAL RESULTS
In this section, we present the experimental evidence
gathered with our path planning application for mul-
tiple and coordinated agents (i.e., probes). We mainly
focus on computational efficiency as this parameter,
together with the length of the path, is the most critical
aspects of any flying-probes tester as shown by (Hirat-
suka et al., 2010) and (Li et al., 2020). Thus, we show
how our parallel implementations, either multi-core
CPU-based or many-core GPU-based, outperform the
original sequential implementation.
Tests have been performed using a home computer
with a CPU Intel i7-9700k with 8 cores and 8 threads,
32 GiB DDR4 of RAM memory, and a GPU NVIDIA
GeForce GTX 1060.
In the following subsections, for the sake of com-
pleteness, we first present some statistics on the PCBs
under test. Then, we report the results gathered with
the algorithm described in Section 4.1 which opti-
mizes the number of points considered to adjust the
trajectory. Finally, we collect statistics in terms of
collision detection and distance computation (Sec-
tion 4.4), and overall trajectory evaluation.
5.1 Benchmark Features
We consider 30 different boards with different sizes
and test point density. Overall, the size varies
from (13 cm x 13 cm) for the smaller boards, to
(65 cm x 55 cm) for the larger ones. The smaller
boards have about 700 test points; the larger ones
more than 40,000. The average number of test points
for all boards is about 7,000. The number of no-fly
areas varies from a few units to about 20. Each board
has to be tested for soldering defects on both sides and
for each of them, the designer also defines equivalent
test points, such as the one for the ground node, the
power supply, and other typical nodes. On average,
our boards have 3,000 equivalent ground points.
5.2 Extra Points
In this subsection, we report the results obtained with
the algorithm described in Section 4.1 which opti-
mizes the number of points considered to adjust the
trajectory.
Table 1 reports the wall-clock time
1
(in seconds)
required to move the 8 probes on an increasing num-
ber of test positions p
i
. As far as the parallel ver-
sion is concerned, we run one thread for each probe,
thus we run 8 threads overall. The first column of the
table reports the (increasing) number of positions n,
i.e., {p
0
, p
1
, . . . , p
n
}, the probes have to span. Column
Full indicates the wall-clock times to compute the tra-
jectory always using the full set of additional points,
that is, calling EXTRAPOINTS directly with a value
of n = 3 to find a collision-free trajectory. Column
Smart reports the time when the incremental version
of the procedure EXTRAPOINTS is adopted, that is,
the one increasing the value of n from 1 to 3. Please,
1
The wall-clock time is the time necessary to a (mono-
thread or multi-thread) process to complete the task, i.e.,
the difference between the time at which the task finishes
and the time at which the task started. For this reason, the
wall-clock time is also known as elapsed time.
ICSOFT 2021 - 16th International Conference on Software Technologies
290
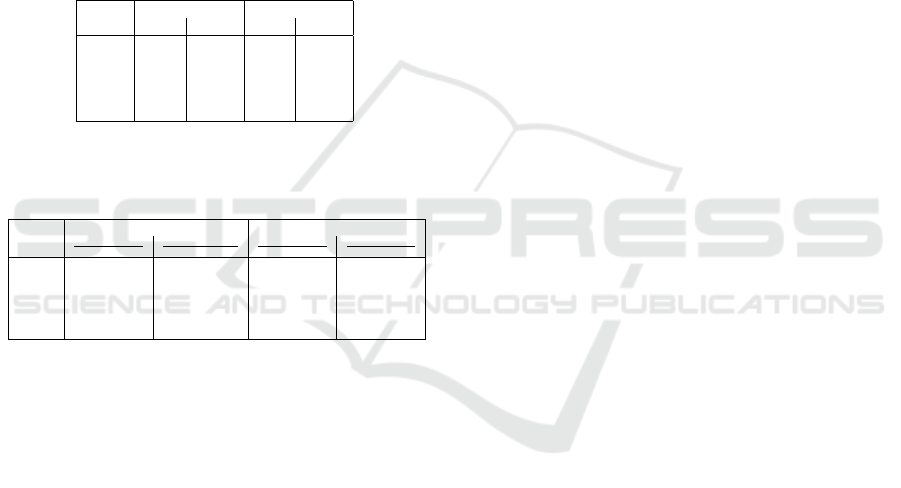
recall that the smart algorithm behaves like the full
version after two iterations, but it checks for the ex-
istence of a more trivial solution first. As it can be
observed in the table, the smart technique is about 8
times faster than the full approach when we use the
sequential strategy and it is about 5 times faster when
we use the parallel method. For both the full and the
smart techniques, the speed-ups of the parallel ver-
sions are obvious.
Indeed, Table 2 reports the speedups obtained with
the different versions with respect to the sequential
full-based implementation. The parallel smart ap-
proach achieves a 10x speedup factor in all test con-
figurations.
Table 1: Total time (in seconds) to perform an increasing
number of tests.
#Tests Sequential Parallel
Full Smart Full Smart
500 1.68 0.21 0.85 0.16
1,000 3.52 0.41 1.53 0.31
5,000 17.42 2.14 6.88 1.71
10,000 33.12 4.20 13.00 3.43
15,000 46.40 6.69 18.75 4.98
Table 2: Speedups to perform an increasing number of tests
of the smart approach and the two parallel approaches with
respect to the sequential full strategy.
#Tests Sequential Parallel
Sequential Full
Sequential Full
Sequential Full
Sequential Smart
Sequential Full
Parallel Full
Sequential Full
Parallel Smart
500 1.00 8.00 1.98 10.50
1,000 1.00 8.59 2.30 11.25
5,000 1.00 8.14 2.53 10.19
10,000 1.00 7.89 2.55 9.66
15,000 1.00 6.94 2.47 9.32
5.3 Distance Computation
In this subsection, we report our results in terms of
collision detection and distance computation using
the procedure of Section 4.4, and overall trajectory
evaluation.
Table 3 focuses on collision detection between
straight paths and no-fly zones. As in the previous
section, we consider an increasing number of test
points (column #Tests). For each number of test
points, we consider a number of test point pairs which
is quadratic in the number of test points, i.e., if n is
the number of test point (first column of the table) we
consider (n · (n − 1)) test pairs. In all cases, we report
the wall-clock times (in seconds) required by the se-
quential and the parallel versions to compute all col-
lisions between the straight path connecting the two
points within the point pair and any no-fly area.
We consider two parallel versions, namely the
multi-core CPU-based and the many-core GPU-based
one. As it can be deduced from the table, parallel
versions are slower when the number of collision to
verify is small. In these cases, the overhead of the
parallel versions is larger than the advantages given
by the concurrent evaluation of the collisions. Im-
provements become significant beyond a few thou-
sands of atomic points (and millions of pairs), and
they tend to grow with the size of the problem. To
deepen our understanding of the gain obtained, we
also run some corner-case experiments on manually-
generated boards. For these boards the position of the
test points was designed such that the number of col-
lision with no-fly areas was extremely large such that
almost all test points resulted as incompatible. Incom-
patible points were saved in specific data structure for
future use. Thus, the collision detection algorithm re-
turned an indication for each incompatible pair such
that the pair itself was stored in the data structure rep-
resenting incompatibilities. This situation is depicted
for the larger test and indicated with 30,000
∗
. Notice
again that this case does not have much sense as far as
the test generation is concerned, but it represents the
worst case scenario for our parallel collision detec-
tion algorithm. In fact, the parallel versions generate
access contention on the data structure including the
incompatibilities, and this contention slows down the
parallel processes show smaller speedups than on the
other cases.
Table 4 focuses on computing the distance of
all test point pairs which are not included in the in-
compatibility list evaluated in the previous step. We
compare the sequential version with the CPU-based
parallel one, and with two GPU-based versions. The
first GPU-based version is optimized for memory us-
age, whereas the second one targets computation time
minimization. As in all previous cases, the parallel
CPU-based version runs 8 hreads. Version GPU
V 2
adopts a matrix-like representation to store all test
point pairs. Albeit this version has a quadratic cost
in memory, it can use the GPU implementation at
its best, as no conflict and no divergence is present
in the algorithm. In this case time costs are mainly
due to memory transfer times between the RAM and
the VRAM local to the GPU. We envisage improve-
ments in the computation times that are almost linear
in the number of threads once all other costs are elimi-
nated. This version represent an upper-bound in terms
of speedup which can indeed be obtained when the di-
mension of the test set is not too large and we do not
overflow the available memory.
For the sake of completeness, Table 5 reports the
computation times to evaluate an entire path moving
along all test points. More specifically, the table re-
ports the elapsed times required by one single probe to
touch every test block within the test set starting from
Smart Techniques for Flying-probe Testing
291
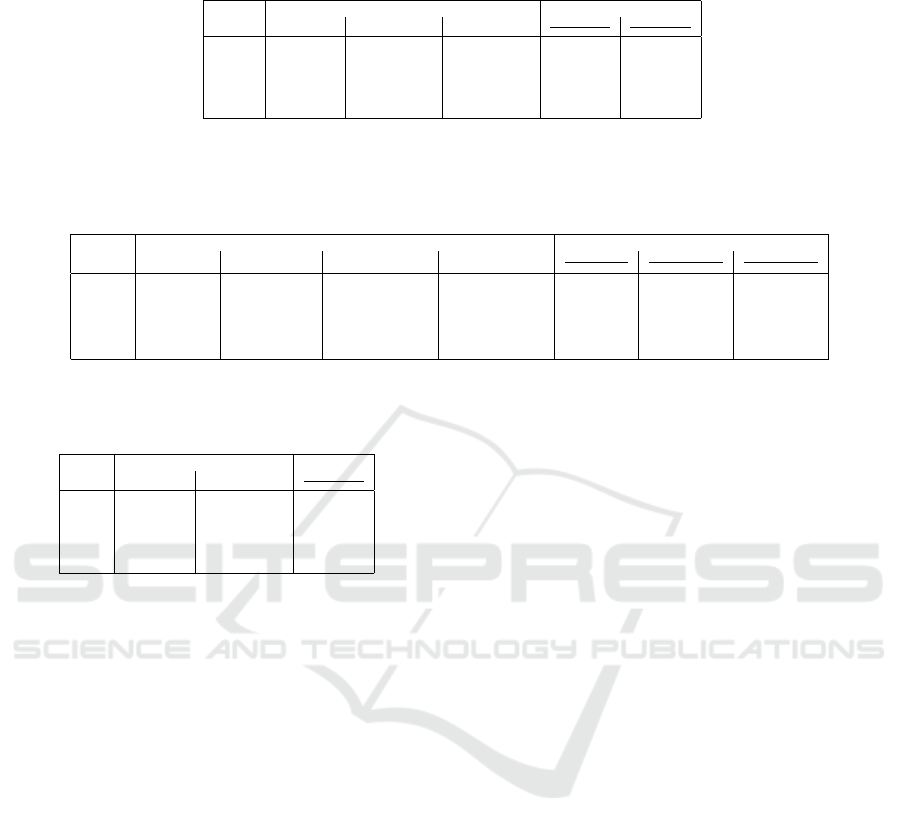
Table 3: Collision detection: Wall-clock times (reported in seconds) required to generate the list of incompatible test points.
The table compares the sequential, the multi-core CPU-based, and the many-core GPU-based versions.
#Tests Times [s] Speedups
Sequential Parallel CPU Parallel GPU
Sequential
Parallel CPU
Sequential
Parallel GPU
100 0.004 0.006 0.019 0.67 0.21
1,000 0.300 0.060 0.148 4.69 2.03
10,000 17.440 9.000 4.150 1.92 4.20
30,000 267.300 37.870 19.430 7.06 13.76
30,000
∗
191.140 59.750 46.510 3.20 4.11
Table 4: Distance computation: Wall-clock times (reported in seconds) required to compute the distance among all test point
pairs not contained in the incompatibility list. The comparison include the sequential version, the multi-core CPU approach,
and two many-core GPU-bases approaches (the first one optimized for memory usage and the second one for computation
time).
#Tests Times [s] Speedups
Sequential Parallel CPU Parallel GPU
V 1
Parallel GPU
V 2
Sequential
Parallel CPU
Sequential
Parallel GPU
V 1
Sequential
Parallel GPU
V 2
100 0.004 0.006 0.019 0.008 0.69 0.21 0.50
1,000 0.300 0.110 0.148 0.071 2.69 2.03 4.23
10,000 17.440 3.544 4.150 0.860 4.92 4.50 20.78
30,000 267.300 52.255 19.430 3.630 7.06 13.75 73.64
30,000
∗
191.140 26.547 46.510 3.610 7.20 4.10 52.95
Table 5: Empirical time measurements and comparisons be-
tween single threaded and parallel pattern implementations
of the test planning.
#Tests Times [s] Speedups
Sequential Parallel CPU
Sequential
Parallel CPU
22 0.138 0.196 0.70
160 0.042 0.046 0.91
2156 43.330 18.950 2.29
5046 15.520 3.530 4.40
6507
∗
1084.260 447.26 2.42
its initial position and moving to the closest test point
at each step. It essentially applies a greedy “travel-
ing salesman problem” to our PCB problem in which
at each step the probe moves on the closest untested
point. In this case the algorithm is not suitable for
a GPU computation, as it is heavily based on the se-
lection of the next point. This selection would make
threads divergence too high and would slow down the
GPU computation.
6 CONCLUSIONS
In this paper, we describe a motion-planning applica-
tion in which 8 probes have to move over a printed cir-
cuit board to reach a sequence of test configurations.
We designed a low-level application optimizing the
steps required to move between those configurations
without the probes crossing each other. The solution
offers a trade-off between the computational time and
the probe repositioning time, finding a reliable local
solution for each probe and optimizing their simul-
taneous change of position for that movement. Al-
though the resulting path may result sub-optimal, ex-
perimental results show how the multi-core approach
effectively reduces the average path finding time by a
significant amount.
Among the future work, we plan to produce a
board and a test-sequence generator to verify our tool
and make the software publicly available. Further
optimizations will be required on some specific and
collateral phases of the algorithm. More experiments
will also be in order with a tighter integration of the
new algorithmic features with the ones already used
by the test planner.
REFERENCES
Bonaria, L., Raganato, M., Reorda, M. S., and Squillero, G.
(2019a). A Dynamic Greedy Test Scheduler for Op-
timizing Probe Motion in In-Circuit Testers. In 2019
IEEE European Test Symposium (ETS), pages 1–2.
Bonaria, L., Raganato, M., Squillero, G., and Reorda, M. S.
(2019b). Test-Plan Optimization for Flying-Probes In-
Circuit Testers. In 2019 IEEE International Test Con-
ference in Asia (ITC-Asia), pages 19–24.
Coombs, C. F. (2016). Printed Circuits Handbook (7th Edi-
tion). McGraw-Hill, Inc., USA.
Dijkstra, E. W. et al. (1959). A note on two problems
in connexion with graphs. Numerische mathematik,
1(1):269–271.
Hiratsuka, Y., Katoh, F., Konishi, K., and Shin, S. (2010).
A Design Method for Minimum Cost Path of Flying
Probe In-Circuit Testers. In Proceedings of SICE An-
nual Conference 2010, pages 2933–2936.
Jurj, S. L., Rotar, R., Opritoiu, F., and Vladutiu, M.
(2020). Affordable Flying Probe-Inspired In-Circuit-
Tester for Printed Circuit Boards Evaluation with Ap-
plication in Test Engineering Education. In 2020
IEEE International Conference on Environment and
Electrical Engineering and 2020 IEEE Industrial and
Commercial Power Systems Europe (EEEIC / I CPS
Europe), pages 1–6.
ICSOFT 2021 - 16th International Conference on Software Technologies
292

Li, W., Yang, J., Lv, X., and Wang, J. (2020). A New
Path Planning Method for Flying Probe Test Arms. In
Chinese Control And Decision Conference (CCDC),
pages 1552–1556.
Radev, P. and Shirvaikar, M. (2006). Enhancement of Fly-
ing Probe Tester Systems with Automated Optical In-
spection. In Proceeding of the Thirty-Eighth South-
eastern Symposium on System Theory, pages 367–
371.
Soh Ying Seah, Melanie Po-Leen Ooi, Ye Chow Kuang,
Chee Sun See, Panchadcharam, S., and Demidenko,
S. (2009). Combining ATE and Flying Probe In-
Circuit Test Strategies for Load Board Verification and
Test. In 2009 IEEE Instrumentation and Measurement
Technology Conference, pages 1380–1385.
van Schaaijk, H., Spierings, M., and Marinissen, E. J.
(2018). Automatic Generation of In-Circuit Tests for
Board Assembly Defects. In IEEE 23rd European Test
Symposium (ETS), pages 1–2.
Smart Techniques for Flying-probe Testing
293
