
Energy-based Control for Soft Manipulators
using Cosserat-beam Models
Brandon Caasenbrood
1 a
, Alexander Pogromsky
1,2 b
and Henk Nijmeijer
1 c
1
Department of Mechanical Engineering, Eindhoven University of Technology, The Netherlands
2
Department of Control Systems and Informatics, Saint-Petersburg National Research University of Information
Technologies, Mechanics, and Optics (ITMO), Russian Federation
Keywords:
Soft Robotics, Cosserat Beam Theory, Dynamic Modeling, Energy-based Control.
Abstract:
In this work, we describe an energy-based control method for under-actuated soft manipulators. The con-
tinuous dynamics of the soft robot are modeled by the differential geometry of Cosserat beams. Through a
finite-dimensional truncation, a reduced port-Hamiltonian model is obtained that preserves desirable passivity
conditions. Exploiting the passivity, we propose a stabilizing energy-shaping controller that ensures the poten-
tial energy is minimal at the desired end-effector configuration. Finally, the effectiveness of the energy-based
controller is demonstrated through simulations of a soft manipulator inspired by the tentacle of an octopus.
1 INTRODUCTION
With an origin in material science, soft robotics is
slowly vesting itself as a prominent successor to con-
ventional rigid robotics. Unlike traditional robots,
soft robots are composed of ‘soft materials’ that en-
able a rich family of motion primitives, inherent
safety, and robustness towards environmental uncer-
tainties. By fully exploiting the properties in soft ma-
terials, soft robotics places the first stepping stones to-
wards achieving performance similar to biology (Choi
et al., 2011; Falkenhahn et al., 2015; Marchese et al.,
2014; Kriegman et al., 2019). In this paper, we pri-
marily focus on a particular subclass of soft robotics
– soft robot manipulators.
Although significant steps have been taken to-
wards bridging biology and soft robotics, its innate
infinite-dimensionality poses substantial challenges
on modeling and control. In theory, soft robots pos-
sess infinitely many degrees-of-freedom along their
continuously deformable body, rendering them partic-
ularly suited for Partial Differential models. Besides,
their mechanical design often employs distributed ac-
tuation (e.g., pneumatics and tendons). Classical de-
scriptions of rigid links and joints paired with lo-
calized actuation are therefore no longer viable nor
a
https://orcid.org/0000-0002-6299-1730
b
https://orcid.org/0000-0001-8755-9832
c
https://orcid.org/0000-0001-5883-6191
physically representative. This paradigm shift calls
for new control-oriented modeling approaches suited
for these intrinsically hyper-redundant and under-
actuated robotic systems.
In the last decade, modeling approaches for soft
robot manipulators have matured sufficiently and as
such their applicability in model-based control is
slowly realizable. To highlight a few: reduced-
order finite element models (Duriez, 2013; Zhang
et al., 2017), constant and non-constant curvature ap-
proaches (Katzschmann et al., 2019; Della Santina
and Rus, 2020), Cosserat-beam models (Renda et al.,
2020; Boyer et al., 2020), modal approximations
(Chirikjian and Burdick, 1992), and learning-based
approaches (Thuruthel et al., 2018). Among them,
the Piece-wise Constant Curvature (PCC) model re-
mains one of the most favored techniques of spa-
tial reduction. The PCC model has proven to be
viable for applications like feedforward controllers
(Falkenhahn et al., 2015), and more recently feedback
dynamic controllers (Della Santina and Rus, 2020;
Katzschmann et al., 2019). Nevertheless, the ap-
proach has its limitations. They do not originate from
continuum mechanics and thus are only applicable in
restrictive settings. Although they offer better compu-
tationally performance than continuous models, due
to their kinematic restrictions, they are unable to cap-
ture important continuum phenomena, like buckling,
environmental interaction or wave propagation.
Caasenbrood, B., Pogromsky, A. and Nijmeijer, H.
Energy-based Control for Soft Manipulators using Cosserat-beam Models.
DOI: 10.5220/0010581503110319
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 311-319
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
311
Cosserat beam-models, on the other hand, have
shown to capture a wider range of nonlinear contin-
uum deformations. These models are rooted in con-
tinuum mechanics and thus provide a more accurate
description of the hyper-flexible nature of soft robots.
The computational dynamics of Cosserat beams have
been extensively developed by (Simo and Vu-Quoc,
1986)through Geometrically-Exact finite elements on
the Lie group SE(3); and recently, these models are
slowly gaining popularity in the soft robotics commu-
nity (Renda et al., 2020; Boyer et al., 2020; Till et al.,
2019). Ultimately, the strong nonlinearities paired
with the diligence to achieve biological performance
encourage Cosserat models for feedback control. Yet,
to the author’s knowledge, their application on model-
based feedback control is relatively scarce.
In this work, we aim to highlight the capabilities
of Cosserat models for model-based control, in par-
ticular energy-based strategies. To this end, a finite-
dimensional modeling approach is proposed such that
the continuous dynamics can be cast into a port-
Hamiltonian (pH) structure. The main advantage of
pH systems is the common formalism with energy-
based control. Through the pH structure, we pro-
pose an energy-shaping control law that ensures sta-
bilization of the end-effector of the soft robot. Sim-
ilar energy-based control strategies can be found in
(Franco and Garriga-Casanovas, 2020; Schaft, 2004;
Ortega et al., 2002) for rigid-body systems. As a study
case, we consider a soft robot manipulator inspired by
an octopus tentacle (see Figure 1). With the ability to
deform continuously and its distributed muscular sys-
tem, it is ideal for illustrating the complex morpholog-
ical motions present in soft robotics. All source code
is made publicly available at (Caasenbrood, 2020).
The paper is organized as follows. Section 2 will
detail a modeling approach for a general class of soft
robot manipulators, starting with the Cosserat-beam
theory. In Section 3, we propose an energy-shaping
control strategy. Lastly, we show the effectiveness
of energy-based controller through numerical simu-
lation, followed by a brief conclusion in Section 5.
2 DYNAMIC MODELING
2.1 Lie Group Notations
Throughout this work, we will explore Lie group the-
ory. We introduce the following notations: the Lie
group of rigid-body transformation on R
3
is denoted
by SE(3), whereas the group of homogeneous rota-
tion is denoted by SO(3). The tangent space at the
identity of the group is called the Lie algebra, and it
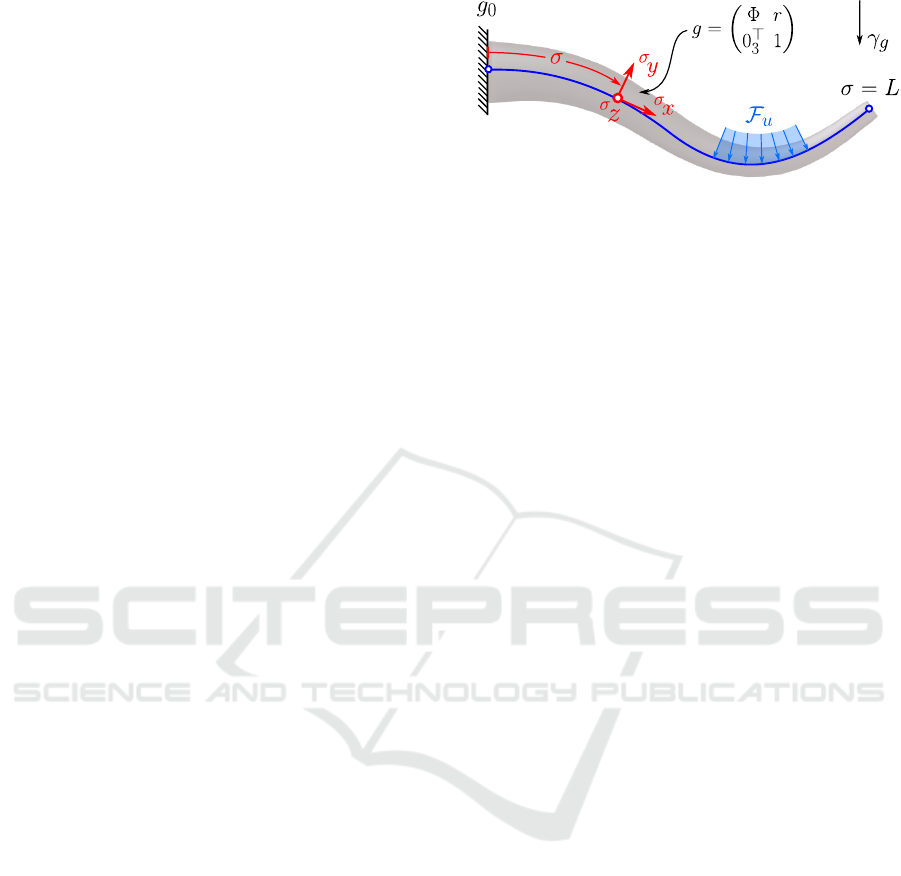
Figure 1: Schematic representation of a soft robot manipu-
lator inspired by the tentacle of an octopus. The soft robot
is model as a Cosserat beam with distributed actuation F
u
.
can be used to describe the evolution of the Lie group.
The Lie algebra of SE(3) and SO(3) are denoted by
se(3) and so(3), respectively. Lastly, the cross opera-
tor (i.e., ”×”) and hat operator (i.e., ”∧”) are used to
transform a column vector of R
3
or R
6
into an ele-
ment of the Lie algebra so(3) or se(3), respectively.
2.2 Cosserat Beam Theory
In Cosserat theory, slender deformable solids are
modeled as elastic strings subjected to geomet-
ric finite-strain theory. Drawing the analogy to
soft robotics, we model the soft robot as a one-
dimensional spatial curve passing through the geo-
metric center of the soft robot (see Figure 1). We
call this curve the ’backbone curve’. Given its spatial-
temporal nature, we introduce a temporal variable t ∈
[0, T ] with finite horizon time T , and a spatial variable
σ ∈ [0, L] with L the undeformed length of the soft
robot. For convenience, we denote T = [0, T ] and X =
[0, L]. For each point on the backbone, we introduce
a (mobile) Serret-Frenet frame that is spanned by a
basis of orthonormal vectors {
σ
x,
σ
y,
σ
z}. The homo-
geneous rotation related to these Serret-Frenet frames
is given by the rotation matrix Φ(σ,t) ∈ SO(3), and
their origin by the position vector r(σ,t) ∈ R
3
.
Following the geometric approach (Simo and
Vu-Quoc, 1986; Boyer et al., 2010; Renda et al.,
2020), we may equivalently represent all Serret-
Frenet frames that are rigidly attached to the continu-
ous backbone by a parameterized curve in SE(3):
g(σ,t) :=
Φ(σ,t) r(σ,t)
0
>
3
1
∈ SE(3). (1)
By considering the partial derivatives of g, an expres-
sion for the strain field ξ and velocity field η any-
where on the Cosserat beam can be found in terms of
its Lie algebra se(3). To do so, we have to introduce
some smoothness conditions:
Assumption 1. All control inputs, i.e., a distributed
control wrench acting on the system, are considered to
be sufficiently smooth for any instance t ∈ T and σ ∈
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
312

X such that the resulting backbone g(σ,t) ∈ SE(3) is
everywhere differentiable.
2.3 Local Strain and Velocity
Let Γ = (κ
1
, κ
2
,κ
3
)
>
and U = (ν
1
, ν
2
, ν
3
)
>
be the
torsion-curvature and elongation-shear strain vector,
respectively. Then, an expression for strain field
ξ(σ,t) is obtained through spatial differentiation of g:
ˆ
ξ := g
−1
∂g
∂σ
=
Γ
×
U
0
>
3
0
!
=⇒ ξ :=
Γ
U
, (2)
Similarly, let Ω = (ω
1
,ω
2
,ω
3
)
>
and V = (v
1
, v
2
, v
3
)
>
be the angular and linear velocity vector, respectively.
Then, an expression for velocity field η(σ,t) is ob-
tained through time differentiation of g:
ˆ
η := g
−1
∂g
∂t
=
Ω
×
V
0
>
3
0
!
=⇒ η :=
Ω
V
. (3)
Since we assume g to be everywhere differentiable,
we can derive a PDE relation for the continuous for-
ward kinematics of the soft robot:
∂η
∂σ
= −ad
ξ
η +
˙
ξ, (4)
where ad
(·)
: R
6
7→ R
6×6
denotes the adjoint action
on the Lie algebra (full derivation in Appendix A).
For completeness, we introduce the adjoint action on
the group and its algebra by
Ad
g
:=
Φ 0
r
×
Φ Φ
; ad
ξ
:=
Γ
×
0
U
×
Γ
×
, (5)
respectively. Drawing an analogy to rigid robotics,
the expression in (4) may be seen as the forward ve-
locity kinematics for a serial chain robot manipulator
with infinitely many links. The expressions for the
Cosserat beam kinematics above is derived similarly
in (Boyer et al., 2020) and (Renda et al., 2020).
2.4 Finite-dimensional Reduction
Similar to finite element methods, we wish to find
a finite-dimensional approximation of the strain field
ξ(σ,·) for all points on the material domain X. To do
so, we assume the following:
Assumption 2. Any element of the strain field ξ(σ,t)
can be written as an infinite expansion of the follow-
ing form:
ξ
i
(σ,t) =
∞
∑
n=1
θ
n
(σ)q
i,n
(t) + ξ
◦
i
(σ) i ∈ {1, ... ,6},
(6)
where {θ
n
}
∞
n=1
is the set of basis functions θ
n
: X → R
together with modal coefficients q
i,n
: T → R , and an
intrinsic time-invariant strain ξ
◦
i
: X → R . The basis
functions θ
n
(·) and the modal coefficients q
n
(·) are
both smooth functions.
Assumption 3. Given (6), the k-th order truncation
for an element of the strain field, defined as
[ξ
i
]
k
(σ,t) :=
k
∑
n=1
θ
n
(σ)q
i,n
(t) +ξ
◦
i
(σ) i ∈ {1,. .., 6},
(7)
converges uniformly on T and X as the index k → ∞.
Moreover, we assume that uniform convergence holds
for its partial derivatives
∂
∂t
[ξ]
k
and
∂
∂σ
[ξ]
k
.
Accordingly, we can rewrite the k-th order truncation
of the complete strain field as follows
[ξ]
k
=
I
6
⊗
θ
1
.. . θ
k
q + ξ
◦
,
=
θ
1
.. . θ
k
.. . 0 ·· · 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 · ·· 0 .. . θ
1
.. . θ
k
|
{z }
Θ(σ)
q
1,1
.
.
.
q
6,k
+ ξ
◦
, (8)
where Θ ∈ R
6×6k
is a sparse shape function matrix
with mutually orthogonal columns, the operator ⊗ de-
notes the Kronecker product, and the vector q ∈ R
6k
is the collection of all time-variant modal coefficients.
Although a wide variety of bases are possible (Boyer
et al., 2020; Della Santina and Rus, 2020), we have
chosen a modified Legendre polynomial set:
θ
n
(σ) =
2
2
n
(n − 1)!
d
n−1
dσ
n−1
h
2σ
L
− 1
2
− 1
i
n−1
(9)
with n ∈ Z
+
the polynomial degree. An alternative
option could be constructing the set of basis func-
tions through the so-called ’snapshot decomposition
method’ using FEM-driven data (Astrid et al., 2008).
2.5 Finite-dimensional Kinematics
Given the finite-dimensional truncation in (8), we can
now find an expression for the finite-dimensional for-
ward kinematics in terms of the generalized coordi-
nates q and its velocities components ˙q.
First, let us regard the configuration of the soft
robot g ∈ SE(3). Recall that the spatial evolution of
the configuration is described by ∂g/∂σ = gξ
∧
, see
Eq. (2). Given the initial condition g(0, ·) = g
0
, an
approximation of the continuously deformable soft
robot can be obtained by partial integration over the
spatial domain:
[g]
k
(σ,t) = g
0
Z
σ
0
[
ˆ
ξ]
k
(s,t) ds. (10)
Energy-based Control for Soft Manipulators using Cosserat-beam Models
313

Next, lets regard the velocity kinematics η(σ,t) for
any point σ on the backbone curve. Using the
differential property of the adjoint action ad
ξ
=
−∂/∂σ[Ad
g
−1
]Ad
g
(Murray et al., 1994), we can
rewrite the continuous forward kinematics in (4) as
∂η
∂σ
=
∂
∂σ
Ad
g
−1
Ad
g
η +
˙
ξ. (11)
Now, given the initial condition η(0, ·) = 0
6
and the
approximations [ξ]
k
and [g]
k
, we can find an approx-
imation to the velocity twist η by partial integration
over space:
[η]
k
(σ,t) = Ad
−1
[g]
k
Z
σ
0
Ad
[g]
k
Θ ds ˙q := [J]
k
˙q, (12)
which naturally gives rise to the geometric Jacobian
[J]
k
∈ R
6×6k
. The geometric Jacobian plays an im-
portant role in obtaining the Lagrangian form of the
reduced-order dynamic model. Finally, to express the
acceleration twist, we take the time-derivative of (12)
leading to
[
˙
η]
k
= [J]
k
¨q +
˙
[J]
k
˙q,
= [J]
k
¨q + Ad
−1
[g]
k
Z
σ
0
Ad
[g]
k
ad
[η]
k
Θ ds ˙q, (13)
which gives rise to the analytic expression of the time-
derivative of the geometric Jacobian
˙
[J]
k
(see Ap-
pendix B for the derivation).
2.6 Finite-dimensional Dynamics
Here, we detail the dynamics of the Cosserat beam.
First, let us consider an infinitesimal slice of con-
tinuum body that is perpendicular to the backbone
curve. The kinetic momenta of this infinitesimal slice
is then given by µ(σ,t) = M η(σ,t) in which M ∈
se
∗
(3) × se(3)
∼
=
R
6×6
denotes the symmetric inertia
tensor.
Remark 1. For some soft robots, the inertia tensor
M may have an explicit dependency on space or time
(or both). Nevertheless, for sake of simplicity, we limit
ourselves to a diagonal invariant inertia tensor M =
diag
{
ρI
3
,ρA
}
with line-density ρ > 0 and the second
moment of area A ∈ so
∗
(3) × so(3)
∼
=
R
3×3
.
Using the expression of the kinetic momenta µ of the
infinitesimal body, we can write the equation of mo-
tion for a particular slice at σ using the Newton-Euler
equations:
∂
∂t
(Ad
−>
g
µ) = Ad
−>
g
F , (14)
where again Ad
(·)
stands for the adjoint action on
the Lie group, and F = F
c
+ F
u
− F
g
− F
e
the resul-
tant wrench that is composed of the constraint wrench
F
c
, the input wrench F
u
, and the potential wrenches
due to gravity and visco-elasticity, F
g
and F
e
, respec-
tively. Further evaluation of (14) leads to
M
˙
η − ad
>
η
M η = F , (15)
where we used the fact that
˙
Ad
−1
g
= −ad
η
Ad
−1
g
. Be-
fore continuing, we introduce a slight modification to
the relation above. Using the fact that ad
η
η = 0
6
, we
can introduce the vector M ad
η
η to (15) without af-
fecting the dynamics. The importance of this modifi-
cation originates from the preservation of passivity in
the Lagrangian model, which is an important property
in stability theorems for robotics. By substitution of
the null vector, the equation of motion becomes
M
˙
η +
M ad
η
− ad
>
η
M
η = F , (16)
which is nothing more than the Newton-Euler equa-
tion for rigid-body motion on R
3
. To introduce the
(reduced-order) Cosserat kinematics and make the ex-
pression symmetric, we substitute (12) and (13) into
(16) and pre-multiply by [J ]
>
k
:
[J ]
>
k
M [J ]
k
¨q + M [
˙
J ]
k
˙q + C
[η ]
k
˙q
= [J ]
>
k
(F
u
− F
g
− F
e
), (17)
where C
(·)
= −C
>
(·)
:= M ad
(·)
− ad
>
(·)
M is a skew-
symmetric matrix. It is important to note that by
pre-multiplication of the transpose Jacobian, we have
eliminated the constraint wrenches, i.e., [ J ]
>
k
F
c
= 0
6
(Murray et al., 1994). Finally, the finite-dimensional
dynamics of the deformable soft robot is found by
spatial integration of (16) over the material domain
X. The overall dynamics can be written in familiar
Euler-Lagrangian (EL) form as follows
M(q) ¨q +C(q, ˙q) ˙q + N(q) + F(q, ˙q) = τ(q,t) (18)
with the system matrices:
M(q) =
Z
X
[J ]
>
k
M [J ]
k
dσ, (19)
C(q, ˙q) =
Z
X
[J ]
>
k
M [
˙
J]
k
+ [ J ]
>
k
C
[η]
k
[J]
k
dσ, (20)
N(q) =
Z
X
[J]
>
k
F
g
dσ, (21)
F(q, ˙q) =
Z
X
[J]
>
k
F
e
dσ := Kq + D ˙q, (22)
τ(q,t) =
Z
X
[J]
>
k
F
u
dσ := Gu(t), (23)
where M is the generalized inertia matrix, C the
centripetal-Coriolis matrix, N a vector of generalized
potential forces with F
g
= −Ad
−1
[g]
k
M γ
g
the external
wrench acting on the body due to gravitational accel-
eration γ
g
, and F
k
a vector of viscoelastic forces im-
posed by the stiffness matrix K and damping matrix
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
314

D. The vector Gu represents the distributed forces
and torques generated by various kinds of the internal
actuators (e.g., tendons or pneumatics). If rank(G) <
dim(q), the system is considered to be under-actuated.
Within the context of soft robotics, whose infinite-
dimensional configuration space cannot be matched
by a finite number of actuators, these systems are of-
ten intrinsically under-actuated. Following the pro-
cedures in finite elements and assuming linear vis-
coelasticity, the stiffness matrix and damping matrix
are computed through spatial integration:
K =
Z
X
Θ
>
K Θ dσ, (24)
D =
Z
X
Θ
>
D Θ dσ, (25)
where K ∈ se
∗
(3)× se(3) and D ∈ se
∗
(3)× se(3) are
the stiffness and damping tensor, respectively.
Lemma 1. The inertia matrix M(q) is a symmet-
ric, positive definite, symmetric. and is uniformly
bounded such that there exists constants λ
1
< λ
2
such
that λ
1
(q)I
n
M(q) λ
n
(q)I
n
< ∞.
Proof. Proof can be found in (Spong et al., 2006)
Lemma 2. Given the inertia matrix M(q) and the
Coriolis matrix C( ˙q,q) as described by (19) and (20),
respectively, it can be shown that the matrix
˙
M − 2C
is skew-symmetric.
Proof. To show
˙
M − 2C is skew-symmetric, we start
by computing the time-derivative of the inertia matrix.
For sake of clarity, lets abbreviate [J ]
k
= J and [
˙
J ]
k
=
˙
J. Through chain differentiation, we find
˙
M =
Z
X
˙
J
>
M J + J
>
M
˙
J dσ, (26)
Then, calculating
˙
M −2C leads to
˙
M −2C =
Z
X
˙
J
>
M J − J
>
M
˙
J − 2J
>
C J dσ. (27)
Since J
>
C J is skew-symmetric, the remainder of
the proof consists of showing that the matrix S =
˙
J
>
M J − J
>
M
˙
J also satisfies skew-symmetry. Since
M = M
>
, we can easily show this holds true:
S =
˙
J
>
M
>
J − J
>
M
>
˙
J,
= −
˙
J
>
M
>
J − J
>
M
˙
J
>
= −S
>
. (28)
Therefore, the matrix
˙
M −2C is skew-symmetric.
In literature, Lemma 2 is often referred to as the
passivity condition. It implies that, in the absence
of external dissipation, the total energy of the system
(i.e., the Hamiltonian) is conserved. It shall be clear
that the passivity property is an important means of
proving stability for robotic systems. It is also worth
mentioning that this condition does not necessarily
hold true for all cases, only for particular computa-
tions of the Coriolis matrix C(q, ˙q) (e.g., through the
Christoffel symbols).
2.7 port-Hamiltonian Formulation
In this section, the Lagrangian model in (18) is rewrit-
ten in port-Hamiltonian form. To this end, we de-
fine the generalized momenta p := M ˙q. Then, the
(reduced-order) Hamiltonian is given by H = T + V
with T (p, q) =
1
2
p
>
M
−1
p and V (q) the kinetic and
potential energy of reduced system, respectively.
Given the Hamiltonian H , it can be easily shown
that generalized velocities can be written in terms of
partial derivatives of the Hamiltonian function
˙q =
∂H
∂p
= M
−1
p. (29)
Note that M
−1
exists due to the positive definiteness
condition in Lemma 1. Similarly, we aim to find a
differential equation that relates the time evolution of
p to the Hamiltonian. Applying the chain rule of dif-
ferentiation to the generalized momenta p, we find
˙p =
˙
M ˙q + M ¨q,
=
˙
M −C − D
M
−1
p − Kq − N + Gu, (30)
Taking the partial derivate of the Hamiltonian H with
respect to the generalized coordinates q, we find
∂H
∂q
=
1
2
∂
∂q
˙q
>
M(q) ˙q
+
∂V
∂q
. (31)
To relate (30) and (31), we have to exploit some struc-
tural properties in the Lagrangian model. To be more
specific, we exploit the skew-symmetry condition as
detailed in Lemma 2. According to the (Spong et al.,
2006), if the matrix S =
˙
M − 2C satisfies the passivity
condition in Lemma 2, it can be shown that
S ˙q = −
∂
∂q
˙q
>
M(q) ˙q
−
˙
M ˙q. (32)
Finally, by combining (29), (30), (31), and (32), we
can show that the Lagrangian model in (18) can be
equivalently rewritten as a port-Hamiltonian system:
˙q =
∂H
∂p
,
˙p = −
∂H
∂q
− D
∂H
∂p
+ Gu.
(33)
with the reduced-order Hamiltonian H =
1
2
p
>
M
−1
p+
V . The advantage of the port-Hamiltonian model
over the EL structure in (18) is the general applica-
bility to different physical domains and the common
formalism with energy-based control techniques.
Energy-based Control for Soft Manipulators using Cosserat-beam Models
315

3 ENERGY-BASED CONTROL
In this section, we aim to find a control law u that
ensures lim
t→∞
g(L,t) = g
d
where g
d
∈ SE(3) de-
notes the desired configuration of the end-effector.
To achieve the control objective, the idea is to shape
the potential energy of the reduced-order dynamical
system using conventional energy-shaping techniques
from the port-Hamiltonian control theory.
3.1 Energy-shaping Controller
We adopted an energy-based control strategy akin
to the work of (Ortega et al., 2002) and (Franco
and Garriga-Casanovas, 2020). Following a simi-
lar energy-shaping strategy, the nonlinear controller
takes the form
u = G
+
∂H
∂q
−
∂H
d
∂q
, (34)
where G
+
=
G
>
G
−1
G
>
is the generalized inverse
of G, and H
d
=
1
2
p
>
M
−1
p + V
d
denotes the desired
Hamiltonian of the closed loop system that satisfies
argmin
g
L
V
d
= g
d
with g
L
= g(L,·). Note that we
omitted any damping injection since the material’s
intrinsic viscoelastic damping is deemed sufficiently
large to guarantee stability. Following the concept of
a kinematic feedback controller that artificially mim-
ics an elastic element between the end-effector and
the desired configuration in SE(3), we choose the
variation of the desired potential energy as follows
dV
d
dq
= λ
1
J
>
JJ
>
+ λ
2
I
−1
F
1
, (35)
where λ
1
> 0 is a proportional gain, λ
2
> 0 a con-
troller gain related to the damping of the pseudo-
inverse, F
1
= k
p
log
SE(3)
([g
L
]
−1
k
g
d
) an artificial con-
trol wrench with positive definite matrix k
p
, and
log
SE(3)
: SE(3) 7→ se(3) the logarithmic map. The
controller gains λ
1
and λ
2
can be tuned accordingly
to tweak the desired transient behavior of the closed-
loop system, similar to a classical PD controller.
4 NUMERICAL STUDY CASE
In this section, we detail some numerical simulations
using the proposed dynamic model in (33) together
with the energy-shaping controller in (34). The trun-
cation degree of the finite-dimensional model is k = 8.
To simulate the under-actuation, we assume an input
matrix G = blkdiag
{
I
3
,O
5
}
such that only the first
three modes are actively controllable.
Table 1: Parameters setting for the numerical solver, the soft
manipulator, and the energy-based controller.
Parameter description Value
Undeformed length L = 120 (mm)
Density ρ = 1250 (kgm
−3
)
Gravitational acceleration γ
g
= 9.8 (ms
−2
)
Young’s modulus E = 25 (MPa)
Shear modulus µ
1
= 10 (MPa)
Constraint modulus µ
2
= 15 (GPa)
Rayleigh coefficient ζ = 0.4 (-)
Due to the partial differential nature, we have to
employ a nested ODE routine to recover the trajecto-
ries for q and p. First, we employ an implicit trape-
zoidal solver with a fixed timestep of dt = 1 ms to
solve (33). At each time increment, we have to eval-
uate the dynamic matrices (17)-(22). To efficiently
compute these dynamic entities, we solve the spatial
integration problem over the material domain X by
using a second-order Runge-Kutta solver. The step-
size for the spatial solver is dσ = 1 mm. The open-
source code is written in c++ and MATLAB, which is
made publicly available at (Caasenbrood, 2020)
For soft material parameters, we choose an
isotropic Hookean material with shear constraints.
All the material properties related to the soft material
are provided in Table 1. Given these material proper-
ties, the inertia tensor and the stiffness tensor become
diagonal matrices:
M = blkdiag
{
ρA, ρA, ρA, ρA
}
,
K = blkdiag
{
µ
1
A, EA, µ
2
A, µ
2
A
}
,
where A > 0 is the (average) cross-sectional area, and
A the second moment of area for a circular disc with
radius R = 8 mm. The damping tensor is chosen as
D = ζK with damping coefficient ζ. The general-
ized stiffness and damping matrix can then be pre-
computed using (23) and (24).
As for control settings, the control gains are tuned
to produce a smooth transient: λ
1
= 0.1 and λ
2
=
0.01. The artificial spring stiffness is chosen as k
p
=
blkdiag
{
0.01 · I
3
,I
3
}
. Lastly, the desired configura-
tion of the end-effector is chosen as follows:
g
d
=
I
3
r
d
0
>
3
1
with r
d
=
0.05
0.00
−0.01
.
The simulation results for the closed-loop soft
robotic system are shown in Figure 2 and Figure
3. Figure 2 shows the trajectories of the modal co-
efficients q(t) and the spatial trajectory of the end-
effector of the soft robot, whereas Figure 3 has been
provided to show the evolution of the continuous de-
formation of the soft robot. As can be seen, the
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
316
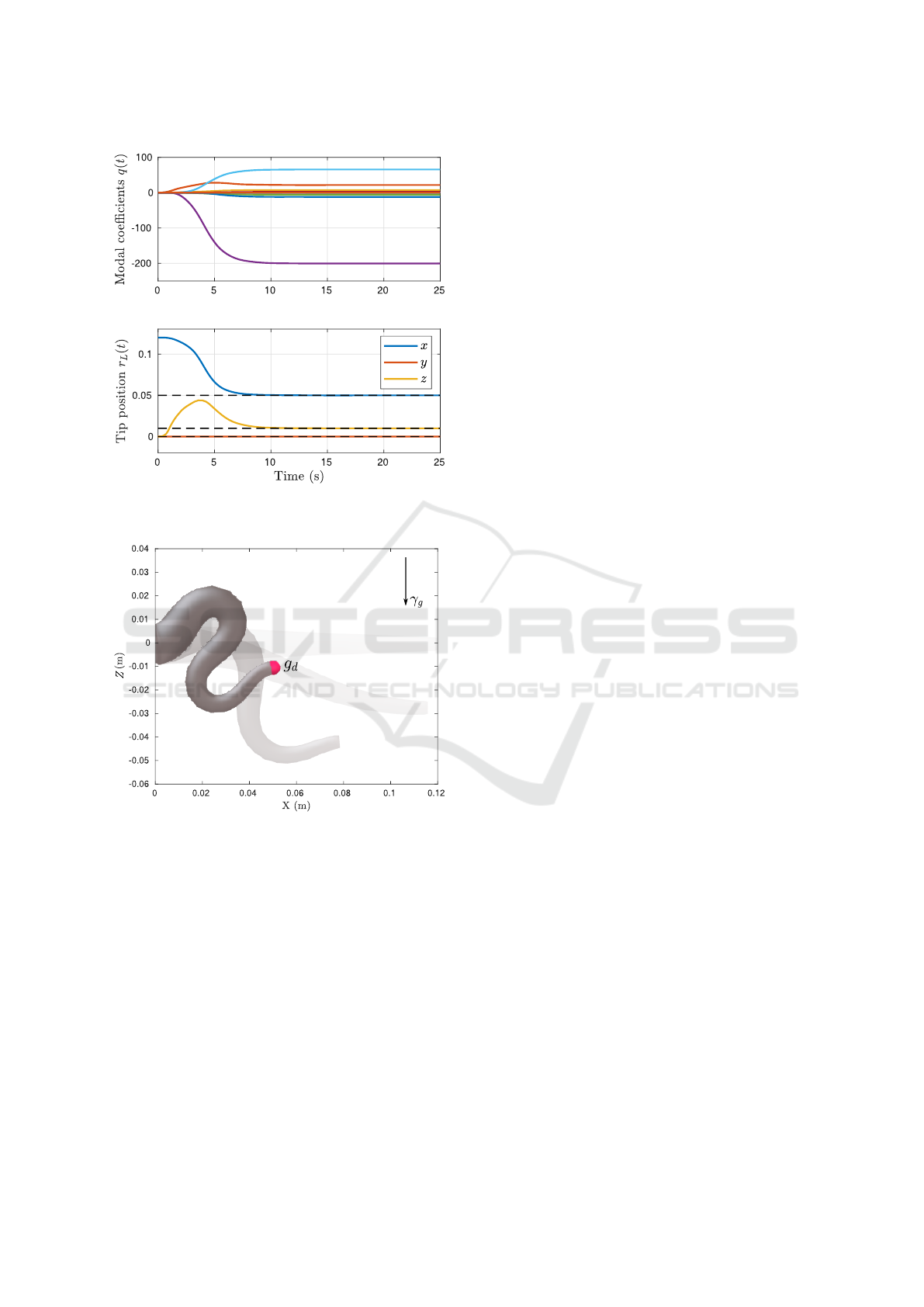
Figure 2: The evolution of the modal coefficients and the
position of the end-effector of the soft robot manipulator.
Figure 3: Three-dimensional evolution of the soft robot
manipulators, slowly converging to the desired set-point
g
d
∈ SE(3).
end-effector of the soft robot manipulator slowly con-
verges to the desired set-point g
d
∈ SE(3). Although
the control gains could be increased to promote a
faster transient, it was observed that high gains lead
to significant oscillations of the flexible structure.
A possible solution might be to introduce negative
damping to the controller Hamiltonian H
d
, to over-
come the soft robot’s structural damping.
5 CONCLUSION
The field of soft robotics is slowly maturing into a
recognized subfield of robotics. Due to their intrin-
sic compliance, they allow for complex morphologi-
cal motions that mimic animals in nature. Achieving
similar performance to biology highlights the need
for more accurate dynamic models and control strate-
gies that fully exploit the hyper-redundant nature of
soft robots. In this work, we provided a modeling
framework for Cosserat beams that leads to a finite-
dimensional system in a port-Hamiltonian structure.
By exploiting the passivity, an energy-shaping con-
troller was proposed that ensures the closed-loop
Hamiltonian is minimal at the desired set-point. In-
spired by an octopus, a numerical model was devel-
oped for a tentacle-like soft robot with distributed
control inputs. The key challenges here regarding
both the model as the controller are their ability
to capture the hyper-flexibility, deal with intrinsic
under-actuation, and exploit its hyper-redundancy to
achieve its control task. Given appropriate controller
gains, the model-based controller yields smooth con-
vergence of the soft robot’s end-effector while ac-
counting for the intrinsic underactuated nature. More-
over, the mobility of the Cosserat model paired with
the energy-based control has, to some extent, a resem-
blance to the biological motions seen in octopuses.
Future work will focus on the following: i) validat-
ing the model and the controller experimentally, ii)
adding hyper-elasticity, iii) constructing a set of basis
functions through the so-called ’snapshot’ decompo-
sition method using FEM-driven data. In particular,
the latter goal could be interesting to explore both ad-
vantages in FEM and Cosserat models, being accu-
rate continuum deformations and computational effi-
ciency, respectively.
ACKNOWLEDGEMENTS
This work is partly supported by NWO, Netherlands
Organization for Scientific Research; and is part of
the Wearable Robotics perspective program. Website:
www.wearablerobotics.nl.
REFERENCES
Astrid, P., Weiland, S., Willcox, K., and Backx, T. (2008).
Missing point estimation in models described by
proper orthogonal decomposition. IEEE Transactions
on Automatic Control, 53(10):2237–2251.
Energy-based Control for Soft Manipulators using Cosserat-beam Models
317

Boyer, F., Lebastard, V., Candelier, F., and Renda, F. (2020).
Dynamics of continuum and soft robots: a strain
parametrization based approach. IEEE Transactions
on Robotics.
Boyer, F., Porez, M., and Leroyer, A. (2010). Poincar
´
e-
cosserat equations for the lighthill three-dimensional
large amplitude elongated body theory: Application
to robotics. 20(1):47–79.
Caasenbrood, B. (2020). Sorotoki - an open-
source soft robotics toolkit for matlab.
https://github.com/BJCaasenbrood/SorotokiCode.
Chirikjian, G. and Burdick, J. (1992). Kinematically
optimal hyper-redundant manipulator configurations.
Proceedings 1992 IEEE International Conference on
Robotics and Automation.
Choi, W., Whitesides, G. M., Wang, M., Chen, X., Shep-
herd, R. F., Mazzeo, A. D., Morin, S. A., Stokes,
A. A., and Ilievski, F. (2011). Multigait soft robot.
Proceedings of the National Academy of Sciences,
108(51):20400–20403.
Della Santina, C. and Rus, D. (2020). Control oriented mod-
eling of soft robots: The polynomial curvature case.
IEEE Robotics and Automation Letters, 5(2):290–298.
Duriez, C. (2013). Control of elastic soft robots based on
real-time finite element method. Proceedings - IEEE
International Conference on Robotics and Automa-
tion, pages 3982–3987.
Falkenhahn, V., Mahl, T., Hildebrandt, A., Neumann,
R., and Sawodny, O. (2015). Dynamic Modeling
of Bellows-Actuated Continuum Robots Using the
Euler-Lagrange Formalism. IEEE Transactions on
Robotics, 31(6):1483–1496.
Franco, E. and Garriga-Casanovas, A. (2020). Energy-
shaping control of soft continuum manipulators with
in-plane disturbances. International Journal of
Robotics Research.
Katzschmann, R. K., Della Santina, C. D., Toshimitsu, Y.,
Bicchi, A., and Rus, D. (2019). Dynamic motion
control of multi-segment soft robots using piecewise
constant curvature matched with an augmented rigid
body model. RoboSoft 2019 - 2019 IEEE Interna-
tional Conference on Soft Robotics, (February):454–
461.
Kriegman, S., Blackiston, D., Levin, M., and Bongard, J.
(2019). A scalable pipeline for designing reconfig-
urable organisms.
Marchese, A. D., Onal, C. D., and Rus, D. (2014). Au-
tonomous Soft Robotic Fish Capable of Escape Ma-
neuvers Using Fluidic Elastomer Actuators. Soft
Robotics, 1(1):75–87.
Murray, R. M., Sastry, S. S., and Zexiang, L. (1994). A
Mathematical Introduction to Robotic Manipulation.
CRC Press, Inc., USA, 1st edition.
Ortega, R., Spong, M. W., G
´
omez-Estern, F., and Blanken-
stein, G. (2002). Stabilization of a Class of Under-
actuated MechanicalSystems Via Interconnection and
DampingAssignment. IEEE Transactions on Auto-
matic Control, 47(8):1218–1233.
Renda, F., Armanini, C., Lebastard, V., Candelier, F., and
Boyer, F. (2020). A Geometric Variable-Strain Ap-
proach for Static Modeling of Soft Manipulators with
Tendon and Fluidic Actuation. IEEE Robotics and Au-
tomation Letters, 5(3):4006–4013.
Schaft, A. J. (2004). Port-Hamiltonian Systems: Network
Modeling and Control of Nonlinear Physical Systems.
Advanced Dynamics and Control of Structures and
Machines, pages 127–167.
Simo, J. C. and Vu-Quoc, L. (1986). A three-dimensional
finite-strain rod model. part II: Computational aspects.
Computer Methods in Applied Mechanics and Engi-
neering, 58(1):79–116.
Spong, M. W., Hutchinson, S., and Vidyasagar, M. (2006).
Robot modeling and control. John Wiley & Sons, New
York.
Thuruthel, T., Falotico, E., Renda, F., and Laschi, C. (2018).
Model-based reinforcement learning for closed-loop
dynamic control of soft robotic manipulators. IEEE
Transactions on Robotics, PP:1–11.
Till, J., Aloi, V., and Rucker, C. (2019). Real-Time Dynam-
ics of Soft and Continuum Robots based on Cosserat-
Rod Real-Time Dynamics of Soft and Continuum
Robots based on Cosserat-Rod Models. (May).
Zhang, Z., Morales Bieze, T., Dequidt, J., Kruszewski, A.,
and Duriez, C. (2017). Visual Servoing Control of
Soft Robots based on Finite Element Model. In IROS
2017 - IEEE/RSJ International Conference on Intelli-
gent Robots and Systems, Vancouver, Canada.
APPENDIX
A. Deriving the Continuous Kinematics
Under Assumption 1, the configuration space of the
soft robot g is everywhere differentiable. Then, using
the equality of mixed partials, i.e.
∂
∂t
(
∂g
∂σ
) =
∂
∂σ
(
∂g
∂t
),
we substitute ∂g/∂t = g
ˆ
η and ∂g/∂σ = g
ˆ
ξ to find
g
ˆ
η
ˆ
ξ + g
∂
ˆ
ξ
∂t
= g
ˆ
ξ
ˆ
η + g
∂
ˆ
η
∂σ
. (36)
Pre-multiplying with g
−1
∈ SE(3) and rearranging the
equality above, we obtain
∂
ˆ
η
∂σ
= −
ˆ
ξ
ˆ
η −
ˆ
η
ˆ
ξ
+
˙
ˆ
ξ, (37)
where we can recognize the Lie bracket or the com-
muter between the vector fields ξ and η (Murray et al.,
1994). Since the Lie bracket [
ˆ
ξ,
ˆ
η] itself also belongs
to se(3), which is isomorphic to R
6
via
ˆ
η 7→ η, we
can rewrite the expressions as follows
∂η
∂σ
= −ad
ξ
η +
˙
ξ, (38)
where ad
(·)
: R
6
7→ R
6×6
defines the adjoint action
map on the Lie algebra se(3). This kinematic relation
is analogous to (Boyer et al., 2020; Renda et al., 2020;
Till et al., 2019)
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
318

B. Partial Derivative of the Geometric
Jacobian Matrix
The mapping from generalized coordinates ˙q ∈ R
n
to
the velocity-twist vector
ˆ
η = g
−1
˙g ∈ se(3)
∼
=
R
6
for
a point σ be given by η = J ˙q where J is the geomet-
ric Jacobian. The k-th order truncations of the exact
geometric Jacobian is given by
[J]
k
= Ad
−1
[g]
k
Z
σ
0
Ad
[g]
k
Θ dσ. (39)
Again, Ad
(·)
above denotes the adjoint action on
SE(3). Unlike its notation in rigid robotics, note that
the geometric Jacobian matrix here is time and space-
variant. Following the chain rule of differentiation,
the partial time-derivate of the geometric Jacobian
matrix yields
˙
[J]
k
=
˙
Ad
−1
[g]
k
Z
σ
0
Ad
[g]
k
Θ dσ
+ Ad
−1
[g]
k
Z
σ
0
˙
Ad
[g]
k
Θ dσ. (40)
Given the differential relations of the adjoint action
mapping on the Lie group, that is, d/ds (Ad
g
) =
Ad
g
ad
ϒ
given a twist ϒ = (g
−1
dg/ds)
∨
, we can ex-
press the time-derivate of the adjoint action and its
inverse as
∂
∂t
(Ad
g
) = Ad
g
ad
η
, (41)
∂
∂t
Ad
g
−1
= −ad
η
Ad
g
−1
. (42)
Substituting the truncated variations of (41) and (42)
into (40), we find the complete expression of the time-
derivate of the geometric Jacobian matrix
˙
[J]
k
= −ad
η
[J]
k
+ Ad
−1
[g]
k
Z
σ
0
Ad
[g]
k
ad
[η]
k
Θ dσ. (43)
Since ad
η
(J ˙q) = ad
η
η = 0
6
by definition, the first
right-hand term vanishes if (43) is post-multiplied
with the generalized velocities ˙q, thus leading to the
expression for the acceleration twist
˙
[η]
k
in (13).
Energy-based Control for Soft Manipulators using Cosserat-beam Models
319
