
Motorcycle Riding Simulator Controllability and Simulator Sickness:
A Proof-of-Concept System
Pauline Michel
1a
, Stéphane Espié
2b
and Samir Bouaziz
1c
1
Université Paris-Saclay, ENS Paris-Saclay, CNRS, SATIE, 91190, Gif-sur-Yvette, France
2
TS2-SATIE-MOSS, Univ. Gustave Eiffel, IFSTTAR, F-77454 Marne-la-Vallée, France
Keywords: Driving Simulator, Simulator Sickness, Sensory Fidelity, Hardware/Software Control, Human-simulator
Interaction, Sensor-actuator Synchronization.
Abstract: Driving a motorcycle relies on the feedback provided by several human sensory systems, on the one hand,
and anticipation of the consequences of control actions, on the other hand. Driving simulators aim to create
the illusion of driving by stimulating the driver’s sensory systems. However, a significant number of drivers
experience simulator sickness, which hinders the usefulness of driving simulators in their applications, such
as driving behavior research or training / re-training. Simulator sickness occurrence is often attributed to
sensory conflict. In this work, we propose an approach to understanding simulator sickness by considering
the need for coherence between the complexity of the vehicle model and the complexity of the simulator from
a hardware point-of-view, which constrains the fidelity of the reproduced sensory stimuli. We then describe
the design of a proof-of-concept system that considers the particular issue of haptic feedback for the
handlebars of a motorcycle-riding simulator. We will use this system in further experiments to demonstrate
the impact of the coherence or mismatch of those two aspects on controllability and simulator sickness
occurrence.
1 INTRODUCTION
Driving a vehicle requires the use of several human
sensory systems: the visual, vestibular, haptic, and
auditory are the main ones. Each of them plays a
different role in the accomplishment of the driving
task. In combination, they make it possible to
estimate distance and speed, crucial parameters for
driving, particularly for vehicle trajectory control,
e.g. braking or collision avoidance. The coherence of
the various sensory feedback, and the removal of any
ambiguity between them, are ensured thanks to
multisensory integration, i.e. fusion of this
information carried out by the brain. The resulting
information is the movement of the body in relation
to the vehicle and its environment. In a driving task,
this allows the driver to decide on a single
interpretation of the current state of the vehicle being
driven (position, speed, acceleration) (Kemeny et al.,
2020), as well as the current state of other objects in
a
https://orcid.org/0000-0002-9743-2402
b
https://orcid.org/0000-0002-3449-8279
c
https://orcid.org/0000-0002-6768-1723
the environment (e.g., other vehicles, pedestrians,
road markings and signs, etc.).
The driver's sensory feedback is not sufficient to
accomplish a driving task. The vehicle must also be
guided to the desired destination (short-term and
medium-term), which is an active closed-loop
control-command and guidance task. The driving
activity is traditionally divided into three task levels:
strategical, tactical, and operational (Michon, 1985;
see also Motte et al., 2019). To control the vehicle
efficiently, i.e. to converge towards precise control,
with minimal oscillations, a model of the controlled
vehicle is required. In the case of human motor
control, it is called the internal model and is learned
and reinforced by experience (Wolpert et al., 2011;
McNamee & Wolpert, 2019; Pierella et al., 2019).
The goal of a driving simulator is to create the
illusion of driving by stimulating the driver's sensory
systems (Siegler et al., 2001; Fischer et al., 2016;
Salisbury & Limebeer, 2017). Inevitably, driving
406
Michel, P., Espié, S. and Bouaziz, S.
Motorcycle Riding Simulator Controllability and Simulator Sickness: A Proof-of-Concept System.
DOI: 10.5220/0010576704060413
In Proceedings of the 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2021), pages 406-413
ISBN: 978-989-758-528-9
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

simulators provide only a subset of the sensory
stimuli available in a real driving situation. The
implementation of a high-fidelity dynamic vehicle
model is a design constraint considered necessary to
best reproduce real-world driving situations. This
constraint, called physical validity (Malaterre &
Fréchaux, 2001; see also Faure, 2017, and Lobjois et
al., 2021), is often taken into account without concern
for the hardware architecture of the simulator and the
sensory cues' fidelity. However, the poor or delayed
restitution of a stimulus, similarly to the absence of
its restitution, can lead to multisensory integration
failing. Furthermore, all drivers do not use each
sensory feedback in the same way. This makes it
difficult to build a simulator suitable for all drivers
and all purposes. Multisensory integration relies on
the redundancy of sensory signals for disambiguation,
but this is not always possible in driving simulators.
This causes discomfort for drivers because it results
in sensory conflict, which is identified and widely
accepted as a cause of Simulator Sickness (SS) as
well as Motion Sickness (MS) (Reason & Brand,
1975).
In this work, we propose an approach to
understanding SS, an adverse physiological reaction
to a simulated driving situation. While MS primarily
affects passengers in vehicles, all users of driving
simulators can suffer from SS (Diels, 2016; Iskander
et al., 2019). This is an essential concern for all
driving simulator applications. We argue that SS
comes from inadequacy between the complexity of
the vehicle model and qualities of the cues provided
to the driver (*). Driving simulators often implement
a high complexity vehicle model, e.g. with a large
number of degrees of freedom and/or non-linearities,
etc. Using a high complexity vehicle model, a driving
simulator can simulate the dynamics of the real
vehicle with high fidelity. However, if the
architecture (HW/SW) of the simulator is not adapted
accordingly, all of the sensory cues corresponding to
the modeled physics cannot be provided to the driver.
For example, in the case of motorcycle riding, the
gyroscopic effect can be modeled but cannot be
rendered using current technology. This inadequacy
may lead to uncontrollability or poor controllability
of the simulated vehicle that induces SS.
We focus on the complex case of reproducing
haptic cues on the handlebars of a motorcycle driving
simulator. We then describe the design of our Proof-
Of-Concept (POC) system, which we plan to use to
test our hypothesis (*) in various experiments. Our
POC system is a motorcycle driving simulator with
haptic feedback on the handlebars. Its design takes
into account the specific constraints of human sensory
systems.
2 ARCHITECTURE / MODEL
MISMATCH AND SIMULATOR
SICKNESS: OUR HYPOTHESIS
Symptoms of SS may vary in type and intensity
depending on the individual (Schweig et al., 2018).
They can be separated into three clusters of
symptoms: (1) oculomotor symptoms, (2)
disorientation, and (3) nausea (Kennedy et al., 1993).
Symptoms and intensity may also vary across
situations for the same individual. In particular, they
depend on the simulated task to accomplish
(Kolasinski, 1995): for example, cornering is one of
the most SS-inducing tasks, especially for the
smallest curvature radii. Rich environments, such as
urban junctions, are also particularly problematic.
However, these situations cannot be excluded from
driving simulators experiments. They are of great
interest both in road safety research and public
education initiatives and in training/retraining
applications.
Experiencing symptoms of SS can affect the
driver’s task performance and/or reduce experiment
duration (Money, 1970; Stoner et al., 2011; Liebherr
et al., 2020). Besides, when a susceptible driver does
not quit the experiment of their own accord,
experiments are often only stopped when the
experimenter is forced to (e.g., after the driver
vomits). This constitutes a bad experience for the
driver and can lead to them having a negative
preconception of driving simulators in general. If the
person agrees to participate in further driving
simulator experiments, this tainted image can produce
anxiety and pre-discomfort (Liebherr et al., 2021),
which have been demonstrated to be negatively
linked to SS (Bertin et al., 2004; Stelling et al., 2021).
This negative preconception can also lead to
definitive refusal of further participation in such
experiments. Furthermore, the elderly population is
particularly susceptible to SS. All of this induces
involuntary “at the door” filtering of the population
studied on driving simulators, i.e. the selection of the
population that is not susceptible to SS. Recent
studies report drop-out rates due to simulator sickness
ranging from 5% to 30% when the participants are
part of the general population (Balk et al., 2013;
Liebherr et al., 2020; Saredakis et al., 2020).
Additionnally, Matas et al. (2015) reported a drop-out
rate of 59% for an experiment focusing on older
Motorcycle Riding Simulator Controllability and Simulator Sickness: A Proof-of-Concept System
407
adults. The results acquired thanks to driving
simulators are hence often biased.
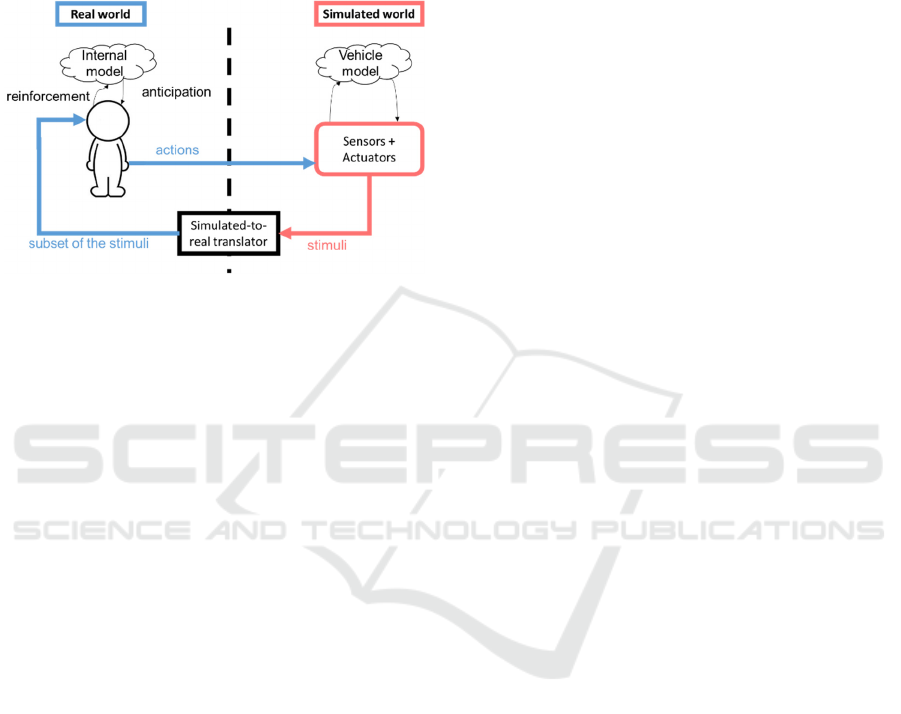
In a simulated driving simulation, as opposed to a
real-world driving situation, the driver teleoperates a
vehicle model, as represented in Figure 1. This is
fundamentally different from driving a vehicle.
Teleoperation control-command rules could be used.
Figure 1: Illustration of the interactions between driver and
driving simulator.
Motorcycle riding is more complex than driving a
car. The rider controls the trajectory of their
motorcycle through two torques: the roll torque and
the steering torque, i.e. the torque applied by the rider
on the motorcycle handlebars. The handlebars of a
motorcycle serve a double action-perception purpose:
the rider controls the system by interacting with them
and they provide sensory feedback. Haptic cues on
the handlebars are essential to the rider and
significantly affect their riding behavior. For
example, they provide feedback on the interaction
between the motorcycle’s tires and the road.
However, measuring the rider’s steer torque is a
complex issue: when the rider exerts a torque on the
motorcycle’s handlebars, the steering column rotates.
Moreover, at high speed, the variations of the angular
position are of small amplitude. This means that any
torque measure will not only reflect the torque
applied by the rider but also the motorcycle’s inherent
dynamics. In motorcycle riding simulators, restitution
of the sensory cues corresponding to haptic
perception on the handlebars is therefore particularly
complex and crucial. Poor or delayed restitution of
haptic cues hinders the controllability of the virtual
vehicle.
Motorcycles are inherently dynamically unstable:
a rider needs to stabilize their motorcycle to ride it.
That is why controllability is a crucial concern for
motorcycle riding simulators, and similarly for car
driving simulators. However, the research on the link
between the controllability of a simulator and SS is
still limited. Car-driving and motorcycle-riding
simulators are currently used only in situations where
they are fully controllable. However, as we
previously mentioned, this means that driving
simulation usage is deprived of situations that are of
great interest such as driving at urban junctions.
A simulator being non-controllable may result in
erratic, oscillating movements that produce
uncontrolled image rotations, which have been shown
to cause SS occurrence (Golding, 2006; Cohen et al.,
2019). Moreover, experiencing control difficulties
may prompt the driver to feel anxious and
uncomfortable, feelings which, as mentioned above,
are also negatively linked to SS.
Our opinion is that a mismatch between the
complexity of the vehicle model and the fidelity of
the sensory stimuli that correspond to it prevents the
driver from being able to adequately control the
virtual vehicle, which then induces SS. As discussed,
SS occurrence and SS symptoms severity are
intrinsically linked to psychological validity, which
we believe should be the goal in designing driving
simulators for road safety research or training
applications. In the following, we focus on the design
of a POC system for this hypothesis, with a special
interest in providing haptic feedback.
3 OUR PROOF-OF-CONCEPT
SYSTEM
Because driving a motorcycle involves several human
sensory systems, each of which the precise role in the
driving task depends on the rider, deciding what
sensory stimuli is reproduced and how is a complex
issue. However, human sensory systems have
inherent time and frequency sensitivities, as well as
physical and biochemical limitations that need to be
taken into account. For example, sensory receptor and
neuromuscular dynamics, nerve conduction, and
neural processing altogether are responsible for a time
delay between the instant when a sensory stimulus (or
stimuli) is applied and the instant when the control
response begins. Time delays respectively introduced
by the visual and haptic system are presented in
Table 1. In this section, we describe the design of our
POC system under these constraints.
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
408
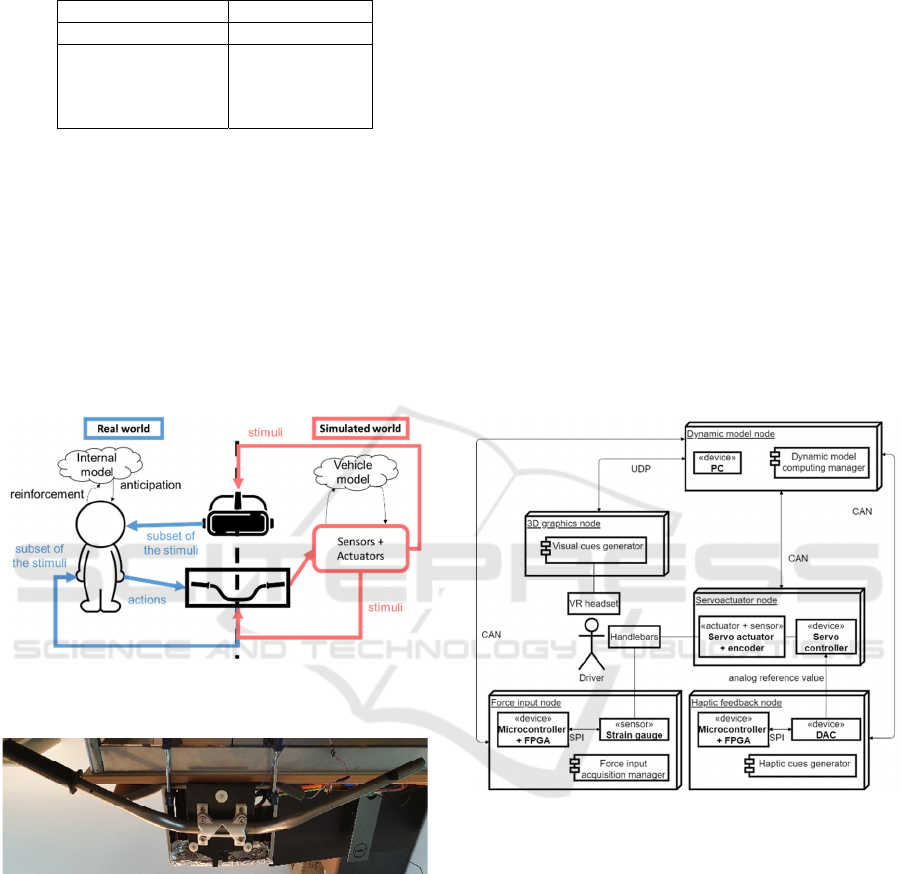
Table 1: Sensory delays characteristic of the visual and
haptic systems (Nash et al., 2016).
Sensory system Sensory dela
y
Visual 100ms
–
560ms
Haptic
> 34ms
or > 48ms
(depending on
the rece
p
tors
)
3.1 System Architecture
Our POC system, represented in Figure 2 provides the
driver with haptic cues using motorcycle handlebars
mechanically coupled to a CanisDrive-20A-160-AM-
H-SIE servo actuator, pictured in Figure 3. Our
system also provides visual cues using a Virtual
Reality (VR) headset, the HTC Vive Pro system. The
goal for the driver is to control the trajectory of a
virtual motorcycle through a virtual scene using this
bimodal feedback.
Figure 2: Schematic representation of the interactions
between the driver and our POC system.
Figure 3: Haptic feedback motorcycle handlebars used in
our POC system.
We use a distributed architecture, as represented
by its deployment diagram in Figure 4. It is
implemented across:
a PC embedding an Intel® Core™ i7-8700
CPU @ 3.20GHz and a Nvidia GeForce GTX
1060 responsible for the computing of the
dynamic model of the simulated system (e.g.,
bicycle or motorcycle). The dynamic model is
computed at a frequency of 1 kHz. This PC is
also responsible for generating the images for
visual rendering;
a lab-made board embedding a mbed
(LPC1768) microcontroller and a Field-
Programmable Gate Array (FPGA), a DE0-
Nano board, responsible for the data
acquisition of the torque applied to the
handlebars by the driver;
a lab-made board embedding a STM32F446
microcontroller and a DE0-Nano board,
responsible for generating haptic cues in
conjunction with a YukonDrive-1021-ADO
servo controller.
This distributed architecture guarantees the stability
of the calculation, sampling, and transmission
frequencies imposed by the constraints we will
discuss in this part. Frequency jitters would
negatively impact the controllability of the riding
simulator, which we want to avoid per our hypothesis
(*).
Figure 4: Deployment diagram of our POC system.
The servo actuator and servo controller are
isolated with special care to avoid electromagnetic
interference between them and the VR headset’s
display.
3.2 Human Control Input
In motorcycle riding simulation, as previously stated,
the rider does not drive a real motorcycle, but
remotely operates a motorcycle model by interacting
with a physical system. In the case of our POC
system, the driver controls the trajectory of the
motorcycle model by acting on the handlebars. The
resulting torque on the steering column is an input of
the motorcycle model and needs to be measured. The
Motorcycle Riding Simulator Controllability and Simulator Sickness: A Proof-of-Concept System
409

servo actuator we use has been specifically picked
because of its high gear ratio (R=160), which makes
it non-manually reversible, ensuring the separation of
the system’s inherent dynamics and the human action
on the system. The torque exerted by the driver on the
handlebars can thus be measured directly using a
strain gauge.
The torque data acquisition board was designed so
that the embedded FPGA can sample the measure of
up to four sensors via SPI communication. In our
application, only one channel is used. The sampled
measures are sent to the embedded microcontroller
after being requested, also via SPI communication.
Both SPI blocks implemented on the FPGA use a
10MHz SCLK frequency for data transfer. The
microcontroller filters the strain gauge data using an
Infinite Impulse Response (IIR) filter, specifically a
2
nd
order low-pass Butterworth numerical filter. The
filter data is then re-transmitted via CAN bus, with a
CAN bus speed of 1Mbits/s.
3.3 Visual Cueing
Visual cues projected into the Head-Mounted Display
(HMD) are computed in real-time by a 3D graphics
generator, the Unity3D engine with the OpenXR
plugin. Relevant model outputs (e.g., position, speed,
acceleration) are sent over Ethernet using UDP at a
frequency of 90 Hz. Using an HMD will also allow
us to implement audio cueing in further work.
For visual rendering, the first time-related
constraint that was taken into account is the image
refresh rate. A constant, sufficient refresh rate is
necessary for the driver to operate under the
impression of continuous, fluid visual motion. 30
frames per second (FPS) is commonly defined as the
acceptable minimum frame rate for this purpose.
However, the images projected in the case of driving
simulators often include vehicles moving at high
speeds, which require a higher refresh rate for the
animation to appear continuous and fluid. Moreover,
a variable refresh rate induces image flickering, as
well as instability of the virtual environment when
using an HMD. These visual effects result in erratic,
oscillating movements of the simulated motorcycle
from the point-of-view of the driver. In our system,
visual cues are generated by the 3D graphics
generator at a constant refresh rate of 90FPS.
As presented in Table 1, the visual system is
characterized by a sensory delay between the
perception of a visual change in the environment and
control response ranging from 100ms to 560ms (Nash
et al., 2016). However, drivers are sensible to much
lower transport delay, i.e. time difference between the
instant of a control-command action – in the case of
our system, turning the handlebars – and system
response. For vision, system response is a change in
the visual scene. When the transport delay introduced
by a system is greater than an acceptable transport
delay, the system becomes more difficult to control or
even uncontrollable. It also causes uneasiness for the
driver. In our application, feedback is bimodal:
visual-tactile. This impacts acceptable latencies for
both the visual and haptic feedback. The maximum
acceptable transport delays are system-, task- and
person-dependent (Attig et al., 2017). For a simulated
driving task, which is a time-critical task, the
maximum acceptable visual latency reported in the
literature is 50ms (Frank et al., 1988; Padmos &
Milders, 1992). As previously stated, in our system,
the VR environment simulation runs at 90FPS.
Assuming that all computations are performed within
one frame, this frame rate alone introduces a latency
of 11ms. However, there are additional software and
hardware sources of transport delay. For the HTC
Vive Pro used in conjunction with the Unity3D game
engine, Le Chénéchal and Chatel-Goldman (2018)
found a mean transport delay of 31.33ms. This is an
acceptable visual latency for a simulated driving task.
However, transport delay does not only depend on the
visual rendering sub-system, but also on the human
haptic cueing sub-system, which will be discussed in
the next subsection.
In conclusion of this section, the design of the
visual cueing sub-system of our POC system takes
into account physiological constraints specific to
vision in the particular context of having to
accomplish a simulated driving task. Consideration of
these constraints allows us to avoid involuntary non-
controllability of the simulated motorcycle and image
flickering and/or oscillations. This will enable us to
test our hypothesis (*) by changing visual feedback
modalities without the risk of uncontrolled changes in
those modalities caused by the system.
3.4 Haptic Cueing
Haptic perception is divided into two dependent
sensory sub-modalities (Reed & Ziat, 2018):
kinesthesia, i.e. the perception of the body’s
movement thanks to proprioceptive sensors
that provide feedback on efforts endured by
the muscles and on the angular position of the
body’s limbs;
tactile perception, or sense of touch, i.e., the
perception of the skin’s interaction with the
environment (pressure, vibration, temperature,
texture, roughness, etc.) thanks to cutaneous
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
410
surface feedback on the material properties of
objects in contact with the body and the
angular position of its limbs.
The mechanoreceptors, specific sensory receptors
located in the different layers of the skin and the joints
and muscles, are respectively responsible for tactile
perception and kinesthesia. There are several types of
mechanoreceptors, which are each sensitive to
specific stimuli of different frequencies. Riding a
motorcycle using handlebars activates three
particular types of mechanoreceptors, the
characteristics of which are summarized in Table 2.
Their respective frequency sensitivities impose
design constraints for the frequency-related
parameters of haptic cueing in our POC system. The
torque exerted by the driver on the handlebars is
sampled at a frequency of 500Hz. This is coherent
with the frequency sensitivities of the
mechanoreceptors involved in the driving task. It also
complies with teleoperation control-command rules
that specify a haptic refresh rate in the range of 500Hz
to 1kHz to ensure the stability and transparency of the
haptic interaction. This loop frequency guarantees the
controllability of the system and thus of the simulated
motorcycle.
The haptic rendering board was specifically
designed for this application so that the embedded
FPGA can sample the encoder data directly from its
serial transmission by the servo controller. Like the
strain gauge data acquisition board, the FPGA and
microcontroller of this board communicate using SPI
with a 10MHz SCLK frequency. Encoder data, i.e.
position and speed of the handlebars, is re-transmitted
over CAN bus at a 1ms period by the microcontroller.
This information is used as inputs of the dynamic
model. This sampling and transmission frequency is
compliant with the haptic loop constraints previously
established.
Table 2: Characteristics (stimulation type sensitivity and
frequency sensitivity) of the mechanoreceptors relevant to
the driving task (Hale & Stanney, 2004).
Mechanoreceptors
Stimulation type
(relevant for the
driving task)
sensitivit
y
Frequency
sensitivity
Pacinian corpuscles
Vibration,
acceleration
100Hz –
1kHz
Ruffini endings
lateral force,
motion direction,
static force
0.4Hz –
100Hz
Meissner corpuscles
Velocity, grip
control
2Hz –
40Hz
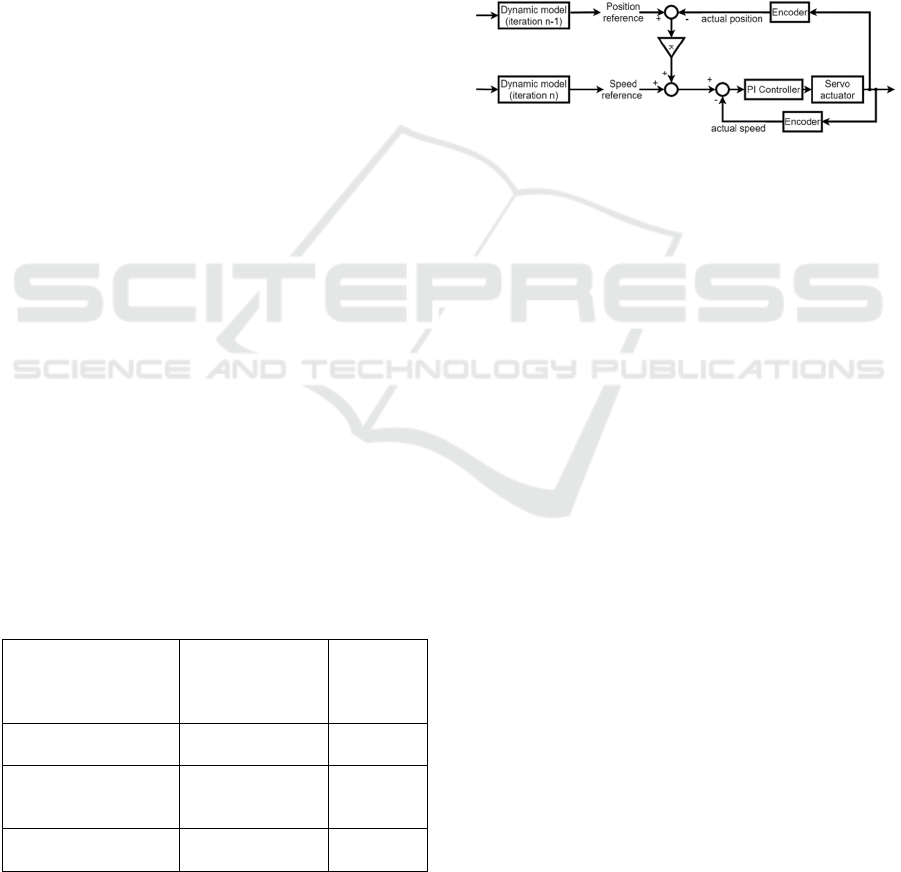
We have described what feedback is transmitted
to the PC that computes the dynamic model, and how
and when it is. Our haptic feedback actuator is speed
controlled using a Proportional Integral (PI)
controller. However, in our implementation, the
speed output of the model is not applied directly as
speed reference but is first corrected using the current
position error. This position-speed dual control
avoids position derivation due to incremental speed
tracking error and numerical integration. The block
diagram representation of the position-speed control
is given in Figure 5. For clarity, model inputs are not
exhaustively represented, but they have been
described in the text.
Figure 5: Block diagram representation of the servo
actuator’s position-speed control.
Similarly to vision, haptic perception allows for a
maximum acceptable transport delay between the
driver trying to turn the handlebars and the handlebars
effectively turning. Even though nerve messages have
a longer distance to travel between the arms and
hands and the brain than between the eyes and the
brain, delays characteristic of haptic perception are
significantly shorter than delays characteristic of
vision (as evidenced in Table 1; see also Cameron et
al., 2014; Crevecoeur et al., 2016). The maximum
acceptable haptic delay varies significantly on the
task, the system, and the person (Kaber & Zhang,
2011). Our objective was the minimization of haptic
latency in our system. CAN bus communication
introduces a well-known delay that corresponds to the
duration of a CAN frame. The maximum duration of
a CAN base frame is around 134µs (for an 8 bytes
data frame). The CAN arbitration process also adds
another delay that is difficult to quantify. This is why
the speed reference value for the servo actuator is
transmitted via an analog input directly to the servo
controller. Speed is thus controlled while minimizing
additional delay in the system control that affects both
haptic and visual latency.
To summarize, we designed the haptic rendering
sub-system of our POC system by taking into account
physiological constraints specific to haptic
perception, such as haptic sensory receptors
frequency sensitivities and minimal haptic latency.
This ensures that this sub-system induces no
involuntary non-controllability of the simulated
Motorcycle Riding Simulator Controllability and Simulator Sickness: A Proof-of-Concept System
411

motorcycle. This will allow us to test our hypothesis
(*) by changing haptic feedback modalities without
risk of uncontrolled changes in those modalities
caused by reasons inherent to the system.
Furthermore, our POC system provides the rider with
good quality haptic feedback on motorcycle
handlebars, which we believe is necessary to ensure
the controllability of any motorcycle driving
simulator.
4 CONCLUSIONS
We argue that Simulator Sickness comes from
inadequacy between the complexity of the vehicle
model and the fidelity of the sensory cues to be
reproduced. We have taken a special interest in
motorcycle riding simulators and in particular in the
issue of providing good quality haptic feedback on
the motorcycle handlebars. Indeed, this feedback
significantly affects the simulator’s controllability
and is not often taken into account.
We aim to demonstrate the cruciality of the
coherence between both of those aspects. To do so,
we have designed a Proof-Of-Concept system that
takes into account the specific constraints of human
sensory systems. This design philosophy, detailed in
this work, will thus allow us to modulate visual and/or
haptic feedback. By doing so, we will be able to
compare the results in terms of (1) controllability and
task performance and (2) anxiety, discomfort, and
eventual SS symptoms severity of a motor control
task when the complexity of the vehicle model and
the fidelity of the sensory cues (a) when they are
coherent and (b) when they are mismatched. The
exploration of our hypothesis in the case of a “simple”
task using this POC system will be our next step. Our
haptic feedback subsystem will allow us to explore
the impact of the adequacy of the motorcycle
dynamic model’s complexity with the complexity of
the simulator architecture on trajectory control,
presence, and SS occurrence in a future experiment.
We plan to compare these aspects for coherent and
mismatched modalities defined by: (1) two dynamic
motorcycle models of different complexity, and (2)
disabled or enabled haptic restitution for the same
motorcycle riding simulator platform.
REFERENCES
Attig, C., Rauh, N., Franke, T., & Krems, J. F. (2017).
System latency guidelines then and now – is zero
latency really considered necessary? In D. Harris (Ed.),
Engineering Psychology and Cognitive Ergonomics
2017, Part II, LNAI 10276 (2-14).
Bertin, R. J. V., Guillot, A., Collet, C., Vienne, F., Espié,
S., & Graf, W. (2004). Objective measurement of
simulator sickness and the role of visual-vestibular
conflict situations: a study with vestibular-loss (a-
reflexive) subjects (poster). Driving Simulation
Conference.
Cameron, B. D., De la Malla, C., & López-Moliner, J.
(2014). The role of differential delays in integrating
transient visual and proprioceptive information.
Frontiers in Psychology, 5(50).
Cohen, B., Dai, M., Yakushin, S. B., & Cho, C. (2019). The
neural basis of motion sickness. Journal of
Neurophysiology, 121(3), 973-982.
Crevecoeur, F., Munoz, D. P., & Scott, S. H. (2016).
Dynamic multisensory integration: somatosensory
speed trumps visual accuracy during feedback control.
Journal of Neuroscience, 36(33), 8598-8611.
Diels, C., & Bos, J. E. (2016). Self-driving carsickness.
Applied Ergonomics, 53, 374-382.
Faure, V. (2017). Les simulateurs de conduite : évaluation
de la validité psychologique sous l’angle de la charge
mentale [Doctoral dissertation]. Université Paris-
Saclay.
Fischer, M., Seefried, A., & Seehof, C. (2016). Objective
motion cueing test for driving simulators. Proceedings
of Driving Simulation Conference, 41-50.
Frank, L. H., Casali, J. G., & Wierwille, W. W. (1988).
Effects of visual display and motion system delays on
operator performance and uneasiness in a driving
simulator. Human Factors, 30(2), 201-217.
Golding, J. F. (2006) Motion sickness susceptibility.
Autonomic Neuroscience: Basic and Clinical, 129(1-2),
67-76.
Hale, K., & Stanney, K. (2004). Deriving haptic design
guidelines from human physiological, psychophysical,
and neurological foundations. Proceedings of IEEE
Conference on Computer Graphics and Applications,
24(2), 33-39.
Iskander, J., Attia, M., Saleh, K., Nahavandi, D., AboBakr,
A., Mohamed, S. M. K., Asadi, H., Khosravi, A., Lim,
C., & Hossny, M. (2019). From car sickness to
autonomous car sickness: a review. Transportation
Research Part F – Traffic Psychology and Behavior,
62, 716-726.
Kaber, D. B., & Zhang, T. (2011). Human factors in virtual
reality system design for mobility and haptic task
performance. Reviews of Human Factors and
Ergonomics, 7(1), 323-366.
Kemeny, A., Chardonnet, J. R., & Colombet, F. (2020).
Self-motion perception and cybersickness. In Getting
Rid of Cybersickness (31-62).
Kennedy, R. S., Lane, N. E., Berbaum, K. S., & Lilienthal
M. G. (1993). Simulator sickness questionnaire: an
enhanced method for quantifying simulator sickness.
The International Journal of Aviation Psychology, 3(3),
203-220.
Kolasinski, E. (1995). Simulator sickness in virtual
environments (Technical Report n°1027). US Army
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
412

Research Institute for the Behavioral and Social
Sciences.
Le Chénéchal, M., & Chatel-Goldman, J. (2018). HTC Vive
Pro time performance benchmark for scientific
research. Proceedings of International Conference on
Artificial Reality and Telexistence and Eurographics
Symposium on Virtual Environments, 81-84.
Liebherr, M., Schweig, S., Brandtner, A., Averbeck, H.,
Maas, N., Schramm, D., & Brand, M. (2020). When
virtuality becomes real: relevance of mental abilities
and age in simulator adaptation and dropouts.
Ergonomics, 63(10), 1271-1280.
Liebherr, M., Mueller, S. M., Schweig, S., Maas, N.,
Schramm, D., & Brand, M. (2021). Stress and
simulated environments: insights from physiological
marker. Frontiers in Virtual Reality, 2.
Lobjois, R., Faure, V., Désiré, L., & Benguigui, N. (2021).
Behavioral and workload measures in real and
simulated driving: do they tell us the same thing about
the validity of driving simulation? Safety Science, 134.
Malaterre, G., & Fréchaux, J. (2001). Etude de la validité
des simulateurs de conduite par comparaison de tâches
réalisées en situation réelle et en simulation. In V.
Cavallo & C. Berthelon (Eds.), Facteurs perceptifs
dans les activités de transport (149-156).
Matas, N. A., Nettelbeck, T., & Burns, R. (2015). Dropout
during a driving simulator study: a survival analysis.
Journal of Safety Research.
McNamee, D., & Wolpert, D. M. (2019). Internal models
in biological control. Annual Review of Control,
Robotics, and Autonomous Systems, 2(1), 339-364.
Michon, J. A. (1985). A critical view of driver behavior
models: what do we know, what should we do? In L.
Evans & R. C. Schwing (Eds.), Human behavior and
traffic safety (485-520).
Money, K. E. (1970). Motion sickness. Physiological
Review, 50(1), 1-39.
Motte, C., Lappi, O., Giles, O., Markkula, G., Mars, F., &
Wilkie, R. (2019). Getting back into the loop: the
perceptual-motor determinants of successful transitions
out of automated driving. Human Factors, 61(7), 1037-
1065.
Nash, C. J., Cole, D. J., & Bigler, R. (2016). A review of
human sensory dynamics for application to models of
driver steering and speed control. Biological
Cybernetics, 110(2-3), 91-116.
Padmos, P., & Milders, M. V. (1992). Quality criteria for
simulator images: a literature review. Human Factors,
34(6), 727-748.
Pierella, C., Casadio, M., Mussa-Ivaldi, F. A., & Solla, S.
A. (2019). The dynamics of motor learning through the
formation of internal models. PLOS Computational
Biology, 15(12).
Reason, J. T., & Brand, J. J. (1975). Motion Sickness.
London: Academic Press.
Reed, C. L., & Ziat, M. (2018). Haptic perception: from the
skin to the brain. In Reference Module in Neuroscience
and Biobehavioral Psychology.
Salisbury, I., & Limebeer, D. (2017). Motion cueing in
high-performance vehicle simulators. Vehicle System
Dynamics, 55(6), 775-801.
Saredakis, D., Szpak, A, Birckhead, B., Keage, H. A. D.,
Rizzo, A., & Loetscher, T. (2020). Factors associated
with virtual reality sickness in head-mounted displays:
a systematic review and meta-analysis. Frontiers in
Human Neuroscience, 14.
Schweig, S., Liebherr, M., Schramm, D., Brand, M. &
Maas, N. (2018). The impact of psychological and
demographic parameters on simulator sickness. In
Proceedings of 8
th
International Conference on
Simulation and Modeling Methodologies, Technologies
and Applications – SIMULTECH, 91-97.
Siegler, I., Reymond, G., Kemeny, A., & Berthoz, A.
(2001). Sensorimotor integration in a driving simulator:
contribution of motion cueing in elementary driving
task. Proceedings of Driving Simulation Conference,
21-32.
Stelling, D., Hermes, M., Gerrit, H., Mittelstädt, J.,
Niedermeier, D., Schudlik, K., & Duda, H. (2021).
Individual differences in the temporal progression of
motion sickness and anxiety: the role of passengers’
trait anxiety and motion sickness history. Ergonomics.
Stoner, H., Fisher, D., & Mollenhauer, M. Jr. (2011).
Simulator and scenario factors influencing simulator
sickness. Handbook of Driving Simulation for
Engineering, Medicine and Psychology, 14-1 - 14-24.
Wolpert, D. M., Diedrischsen, J., & Flanagan, J. R. (2011).
Principles of sensorimotor learning. Nature Reviews
Neuroscience, 12(12), 739-751.
Motorcycle Riding Simulator Controllability and Simulator Sickness: A Proof-of-Concept System
413
